Изобретение относится к транспортным средствам с движителями, а также к способам их передвижения.
Известно транспортное средство, содержащее корпус, опирающийся на две последовательно расположенные группы колес с обгонными муфтами, привод передвижения, выполненный в виде гидроцилиндра, одним концом шарнирно-соединенный с корпусом транспортного средства, а другим - с одной из групп колес, при этом с целью расширения функциональных возможностей путем обеспечения непрерывности движения, оно снабжено дополнительным гидроцилиндром, один конец которого соединен с корпусом транспортного средства, а второй - с другой группой колес, при этом группы колес, при этом группы колес смонтированы с возможностью продольного перемещения относительно корпуса (авт.св. 981068, опубл. 15.12.82).
К причинам, препятствующим достижению требуемого технического результата при использовании транспортного средства и способа его перемещения, относится низкая скорость перемещения по опорной поверхности с твердым покрытием, а также недостаточная эффективность при перемещении по опорной поверхности с малой несущей способностью и пересеченным рельефом местности.
Наиболее близким устройством к заявленному является устройство перемещения транспортного средства, содержащее хотя бы две части с механизмом поступательного перемещения, причем на каждой части установлен хотя бы один движитель, при этом движители соединены приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы (патент РФ №2189330 С2, опубл. 20.09.2002).
К недостаткам, препятствующим достижению требуемого технического результата при использовании устройства перемещения транспортного средства, относятся: недостаточная эффективность при перемещении по опорной поверхности с включением препятствий (ямы, рвы, пни, насыпи и т.п.); отсутствие возможности полной разгрузки от части собственного веса транспортного средства и перевозимого им груза, приходящегося на движители, поступательное движение которых выполняется в момент передвижения, что снижает проходимость на почвах с низкой несущей способностью.
Задача - повышение эффективности транспортных средств за счет расширения функциональных возможностей.
Технический результат - повышение проходимости по опорной поверхности с низкой несущей способностью и пересеченным рельефом местности, с возможностью выбора скоростного режима движения, способа передвижения и управления.
Указанный технический результат достигается устройством перемещения транспортного средства состоящим из частей с механизмами поступательного перемещения причем на каждой части установлен движитель, который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы, согласно изобретению дополнительно содержит механизм перемещения каждого из движителей в вертикальной плоскости относительно транспортного средства, механизм продольного перемещения кузова и кабины транспортного средства относительно его рамы, средства технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средства определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блок получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источник энергии, при этом механизм перемещения каждого из движителей в вертикальной плоскости закреплены на соответствующем им механизме продольного перемещения и соединены с соответствующим им движителем, при этом механизм поступательного перемещения каждого из движителей выполнен в виде механизма их продольного перемещения, при этом механизм продольного перемещения кузова и кабины закреплен на раме транспортного средства, при этом средства технического зрения и определения несущей способности опорной поверхности установлены на транспортном средстве, средства определения сцепных свойств опорной поверхности установлены на движителях, средства определения пространственного положения движителей и кузова с кабиной установлены соответственно на осях движителей и кузове с кабиной, при этом средства посредством способов передачи данных передают их на блок получения, обработки и выдачи информации, при этом блок получения, обработки и выдачи информации установлен на транспортном средстве и посредством способов получения данных получает их от средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения каждого из движителей и кузова с кабиной, обрабатывает и передает посредством способов передачи команды на включение или выключение работы источника энергии, при этом источник энергии установлен на транспортном средстве и посредством способов получения команд получает их от блока получения, обработки и выдачи информации и посредством способов передачи движения приводит в работу один или нескольких механизмов из числа установленных на транспортном средстве, при этом количество источников энергии на транспортном средстве не менее одного, при этом движители, находящиеся на противоположных сторонах бортов транспортного средства, соединены между собой посредством осей, при этом количество осей с установленными на них движителями не менее трех.
Изобретение поясняется чертежами.
На фиг. 1 изображен вид общий.
На фиг. 2 - вид сбоку (вид А).
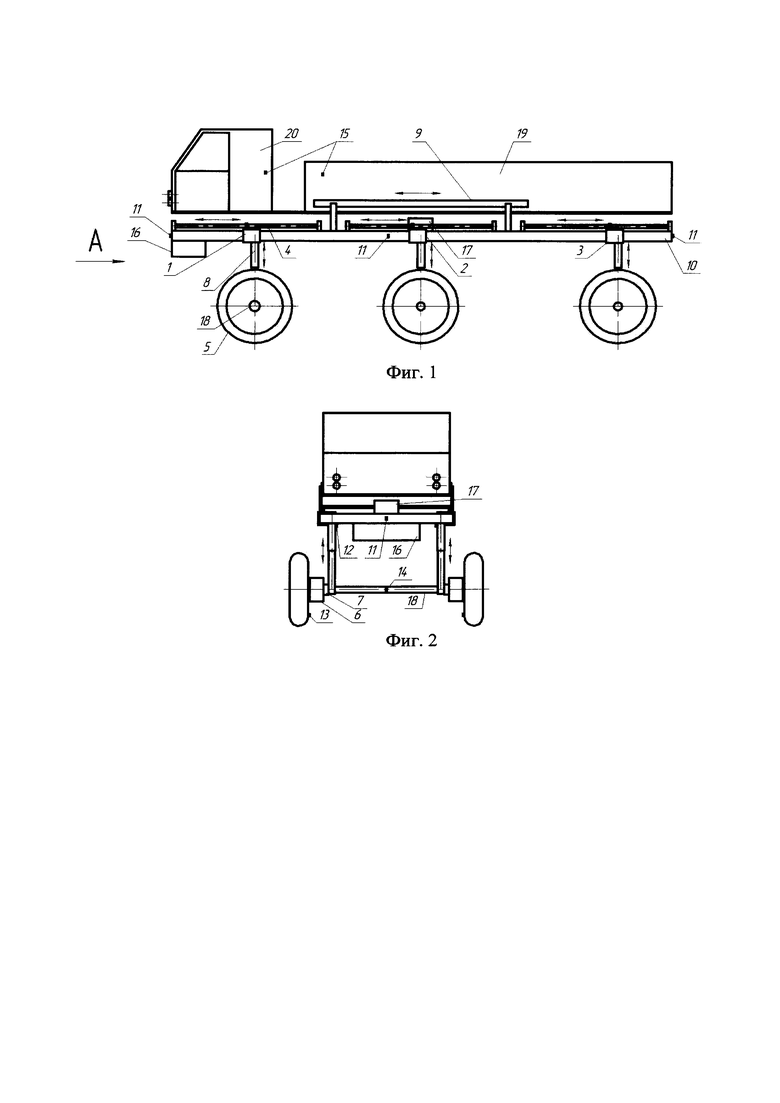
На фиг. 3 - схемы возможного расположения осей с движителями.
На фиг. 4 - схема способа передвижения транспортного средства по опорной поверхности с пересеченным рельефом местности.
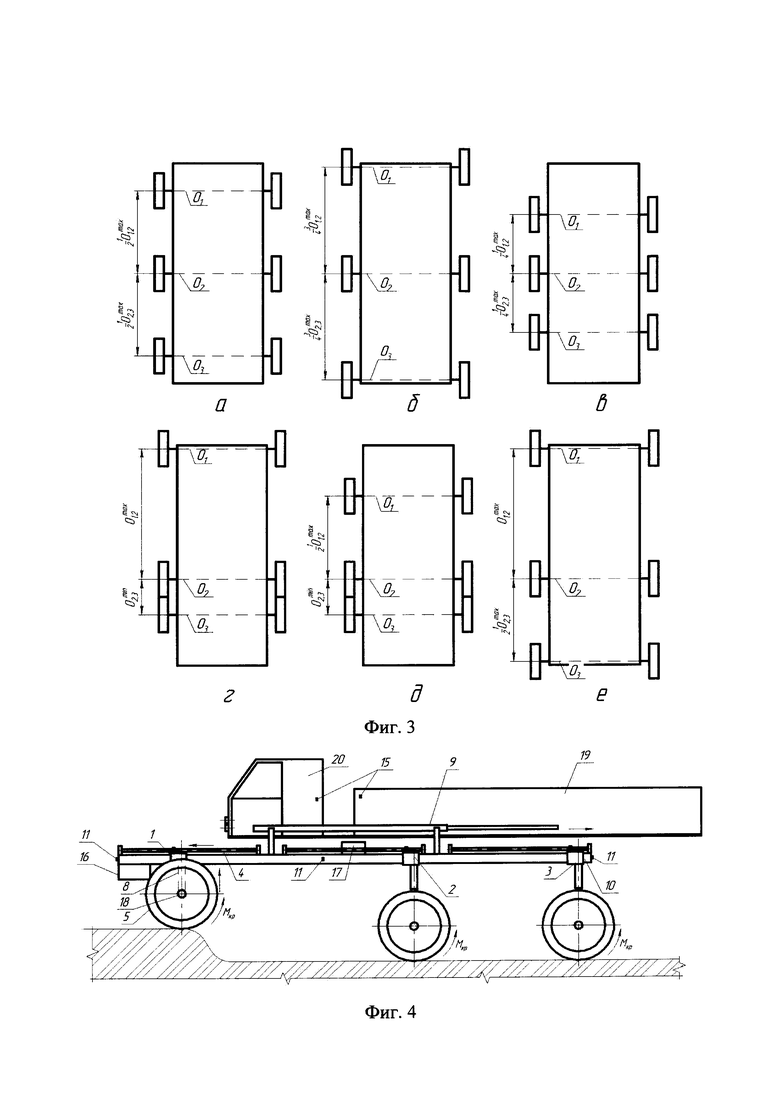
На фиг. 5 - схема дискретного передвижения транспортного средства без отрыва движителей от опорной поверхности.
На фиг. 6 - схема дискретного передвижения транспортного средства с отрывом движителей от опорной поверхности.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Предлагаемое устройство перемещения транспортного средства состоит из трех частей 1 - 3 с механизмами их поступательного перемещения 4, движителей 5, приводных механизмов вращения 6, устройства задания крутящего момента 7, механизмов перемещения движителей в вертикальной плоскости 8, механизма продольного перемещения кузова и кабины 9, рамы 10, средств технического зрения 11, средства определения несущей способности опорной поверхности 12, средства определения сцепных свойств 13 движителей с опорной поверхностью, средств определения пространственного положения движителей 14, средства определения пространственного положения кузова с кабиной 15, блока получения, обработки и выдачи информации 16, источника энергии 17, осей 18, кузова 19 и кабины 20.
Части 1 - 3 с механизмами их поступательного перемещения 4 устанавливаются на раму 10 транспортного средства, причем к каждой из частей крепится механизм перемещения движителей с осью 18 в вертикальной плоскости 8.
Движители 5 могут иметь различную форму и размеры, позволяющие транспортному средству передвигаться по опорной поверхности любым из известных способов (качения, шагание, волновое перемещение и их комбинации). Для определения сцепных свойств опорной поверхности на движителях 5 транспортного средства установлены средства 13.
Приводные механизмы вращения 6 обеспечивают вращение движителей 5 и могут быть выполнены любым известным техническим решением (редуктор, гидромотор и т.д.)
Устройства задания крутящего момента 7 после получения управляющей команды от блока получения, обработки и выдачи информации 16 задают приводным механизмам вращения 6 движителей 5 необходимый в зависимости от состояния опорной поверхности крутящий момент и могут быть выполнены любым из известных технических решений (электродвигатель, насос и т.д.).
Механизм перемещения каждого из движителей в вертикальной плоскости 8 может быть выполнен любым из известных технических решений (передача винт-гайка, гидроцилиндр, реечная передача и т.п.) и обеспечивает возможность отрыва движителей 5 от опорной поверхности с целью их последующего переноса, за счет работы механизмов их продольного перемещения 4, и постановки на новые участки, включая участки с малой несущей способностью, подъемы и спуски при преодолении препятствий.
К механизмам перемещения каждого из движителей в вертикальной плоскости 8 крепятся оси 18, приводные механизмы вращения 6 устройств задания крутящего момента 7 движителей 5.
Механизм продольного перемещения кузова и кабины 9 расположен на раме 10 транспортного средства, может быть выполнен любым из известных технических решений (передача винт-гайка, гидроцилиндр, реечная передача и т.п.) и позволяет перемещать кузов 19 и кабину 20, с расположенным в нем грузом, изменяя положение центра тяжести вдоль рамы 10.
Средства технического зрения 11 расположены на транспортном средстве и используются для сбора информации об объектах и предметах, находящихся рядом и на пути передвижения транспортного средства, и посредством любого из известных способов передачи информации (проводная связь, Bluetooth, нейросеть и т.п.) передают ее блоку получения, обработки и выдачи информации 16.
Средства определения несущей способности опорной поверхности 12 расположены на транспортном средстве и определяют состояние опорной поверхности на пути передвижения транспортного средства и посредством любого из известных способов передачи информации (проводная связь, Bluetooth, нейросеть и т.п.) передают ее блоку получения, обработки и выдачи информации 16.
Средства определения сцепных свойств опорной поверхности 13 установлены на движителях 5 транспортного средства и определяют их сцепные свойства с опорной поверхностью на пути передвижения транспортного средства и посредством любого из известных способов передачи информации (проводная связь, Bluetooth, нейросеть и т.п.) передают ее блоку получения, обработки и выдачи информации 16.
Средства определения пространственного положения движителей 14 установлены на осях 18 или движителях 5 и определяют их пространственное положение относительно рамы 10 транспортного средства, а также взаимное расположение между движителями, расположенными на других осях и посредством любого из известных способов передачи информации (проводная связь, Bluetooth, нейросеть и т.п.) передают ее блоку получения, обработки и выдачи информации 16.
Средства определения пространственного положения кузова с кабиной 15 установлены на кузове 19 и/или кабине 20, и определяют их положение относительно рамы 10 транспортного средства и посредством любого из известных способов передачи информации (проводная связь, Bluetooth, нейросеть и т.п.) передают ее блоку получения, обработки и выдачи информации 16.
Блок получения, обработки и выдачи информации 16 установлен на транспортном средстве и посредством способов получения данных получает их от средств технического зрения 11, определения несущей способности опорной поверхности 12 и ее сцепных свойств 13, а также средств определения пространственного положения движителей 14 и кузова с кабиной 15, обрабатывает и определяет при рабочих условиях возможный способ и скоростной режим передвижения, и в зависимости от способа управления передает посредством способов передачи команды на включение или выключение работы источника энергии 17.
Источник энергии 17 установлен на транспортном средстве и может быть представлен любым из известных видов энергетических средств (электродвигатель, двигатель внутреннего сгорания, насос и т.п.) и посредством способов получения команд получает их от блока получения, обработки и выдачи информации 16 и посредством любого из известных способов передачи движения (электрический сигнал, механическая передача, гидравлический или пневматический сигнал и т.п.) приводит в работу один или нескольких механизмов из числа установленных на транспортном средстве.
Каждая из осей 18 обеспечивает соединение между собой двух движителей 5, располагающихся по разные стороны бортов транспортного средства, и установки средств определения их пространственного положения.
Кузов 19 и кабина 20 посредством механизма 9 могут перемещаться вдоль рамы 10, обеспечивая техническую возможность изменения положения центра тяжести при перемещении одной из частей 1 - 3 с механизмами их поступательного перемещения 4.
Работа устройства перемещения транспортного средства осуществляется следующим образом.
При передвижении транспортного средства по опорной поверхности с отсутствием препятствий и устойчивой несущей способностью информация со средств технического зрения 11 (фиг. 1) и определения несущей способности опорной поверхности 12, средств определения ее сцепных свойств 13, средств определения пространственного положения движителей 14 и кузова с кабиной 15 поступает на блок получения, обработки и выдачи информации 16, который анализирует поступившую информацию и выдает управляющие команды на работу источника энергии 17, который посредством любого из известных технических решений передачи движения приводит в работу механизмы поступательного перемещения 4 частей 1-3, механизмы перемещения движителей 5 с осями 18 в вертикальной плоскости 8, механизм продольного перемещения кузова и кабины 9 относительно рамы 10 транспортного средства, с целью обеспечения их оптимального расположения в зависимости от типа и состояния опорной поверхности. Далее блок получения, обработки и выдачи информации 16 подает управляющую команду на работу источника энергии 17, который посредством любого из известных технических решений передачи движения через устройство задания крутящего момента 7 (фиг. 2) и приводной механизм вращения 6 подает на движители 5 крутящий момент, обеспечивая оптимальный при заданных условиях скоростной режим передвижения транспортного средства способом качения. Выбор схемы возможного расположения осей 18 с движителями 5 (фиг. 1) при передвижении способом качения зависит от типа и состояния опорной поверхности, рельефа земли, величины загрузки транспортного средства и необходимой продольной устойчивости. Некоторые схемы возможного расположения осей с движителями представлены на фиг. 3: на фиг. 3а оси О1 О2, О3 располагаются на расстоянии  на фиг. 3б -
на фиг. 3б - 
 на фиг. 3в -
на фиг. 3в -  на фиг. 3г -
на фиг. 3г -  на фиг. 3д -
на фиг. 3д -  на фиг. 3е -
на фиг. 3е - 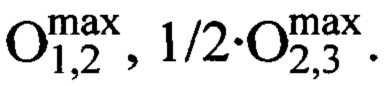
Возможно передвижение транспортного средства по опорной поверхности с пересеченным рельефом местности при этом передвижение способом качения останавливается и одновременно блок получения, обработки и выдачи информации 16 (фиг. 4) обрабатывает информацию, поступившую от средств 12-15 и выдает управляющую команду источнику энергии 17 на последовательное включение в работу механизмов перемещения движителей в вертикальной плоскости 8 и механизмов поступательного перемещения 4 частей 1-3, механизма продольного перемещения кузова и кабины 9 относительно рамы 10. Преодоление препятствий происходит при оптимальном при заданных условиях скоростном режиме шагающим способом передвижения движителей 5, с возможностью при необходимости подачи к ним от устройств 17, 5 и 6 крутящего момента.
Возможно передвижение транспортного средства по опорной поверхности с низкой несущей способностью, когда несущей способности и сцепных свойств опорной поверхности недостаточно, чтобы передвигаться способом качения, при этом возможны следующие способы движения:
1) дискретное передвижение транспортного средства без отрыва движителей от опорной поверхности, технологическая последовательность которого заключается в следующем (фиг. 5): посредством механизма продольного перемещения 4 части 1 и крутящего момента приложенного к движителю 5 от приводного механизма вращения 6 с устройством задания крутящего момента 7, часть 1 смещается вперед на расстояние, ограниченное технически возможной величиной механизма 4; затем движители 5 части 1 тормозятся, а механизм продольного перемещения 4 части 1 начинает работать, причем одновременно к движителям 5 частей 2 и 3 прикладывается крутящий момент от приводного механизма вращения 6 с устройством задания крутящего момента 7, что обеспечивает перемещение оставшейся части транспортного средства вперед. Далее цикл повторяется или возможен вариант дискретного последовательного передвижения аналогичным образом двух или трех частей 1 - 3, а затем за счет работы механизмов продольного перемещения 4 передвигаются оставшиеся части транспортного средства - рама 10, кузов 19 и кабина 20 (фиг. 5);
2) в случае если сцепные свойства опорной поверхности стремятся к нулю, возможен вариант передвижения подвижных частей 1-3 транспортного средства с отрывом движителей 5 от опорной поверхности (фиг. 6). Для этого центр тяжести посредством механизма продольного перемещения кузова и кабины 9 кузов 19 и кабина 20 смещаются между движителями 5 подвижных частей 2, 3 занимая среднее положение и разгружая движители части 1 от собственно массы транспортного средства и перевозимого им груза. За счет механизмов перемещения каждого из движителей в вертикальной плоскости 8 движители подвижной части 1 отрываются от опорной поверхности, далее за счет работы механизма ее продольного перемещения 4 смещаются вперед на расстояние, ограниченное технически возможной величиной механизма 4. Затем механизмы перемещения каждого из движителей в вертикальной плоскости 8 опускают на опорную поверхность движители 5 подвижной части 1, причем работа всех механизмов осуществляется от источника энергии 17 и контролируется средствами 11, 12, 14 и 15. Передвижение движителей подвижных частей 2 и 3 выполняется аналогично, причем центр тяжести транспортного средства всегда должен располагаться между движителями, подвижные части которых находятся в покое относительно рамы 10 (фиг. 6). Перемещение оставшихся частей транспортного средства -рамы 10, кузова 19 и кабины 20 выполняется за счет одновременной работы механизмов продольного перемещения 4 частей 1 - 3 и механизма продольного перемещения кузова и кабины 9. Далее цикл повторяется.
При передвижении по опорной поверхности способ передвижения может изменяться и выбирается в зависимости от характера и качества поверхности движения и возможных технических решений, заложенных в устройство транспортного средства.
Способ управления транспортным средством при передвижении различными способами и с различным скоростным режимом может осуществляться в автоматическом режиме или при участии водителя.
Таким образом, заявленное устройство обеспечивает повышение проходимости по опорной поверхности с низкой несущей способностью и пересеченным рельефом местности, с возможностью выбора скоростного режима движения, способа передвижения и управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передвижения транспортного средства | 2022 |
|
RU2792008C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2008 |
|
RU2369514C1 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2005 |
|
RU2278053C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| СПОСОБ АГРЕГАТИРОВАНИЯ НАБОРА СМЕНЯЕМЫХ МОДУЛЕЙ-АДАПТЕРОВ И БЛОКОВ ИЗ НИХ С ЭНЕРГОСРЕДСТВОМ ДЛЯ ВЫПОЛНЕНИЯ МЕХАНИЗИРОВАННЫХ РАБОТ ПРИ ПРОИЗВОДСТВЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2431954C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ВЕЗДЕХОД | 2007 |
|
RU2347708C2 |
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
Устройство перемещения транспортного средства состоит из частей с механизмами поступательного перемещения. На каждой части установлен движитель (5), который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы. Устройство перемещения содержит механизм перемещения (8) каждого из движителей (5) в вертикальной плоскости относительно транспортного средства, механизм (9) продольного перемещения кузова (19) и кабины (20) транспортного средства относительно его рамы, средства технического зрения, средства определения несущей способности опорной поверхности и ее сцепных свойств, а также средства определения пространственного положения движителей (5) и кузова (19) с кабиной (20) относительно рамы транспортного средства, блок получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источник энергии. Достигается повышение проходимости. 6 ил.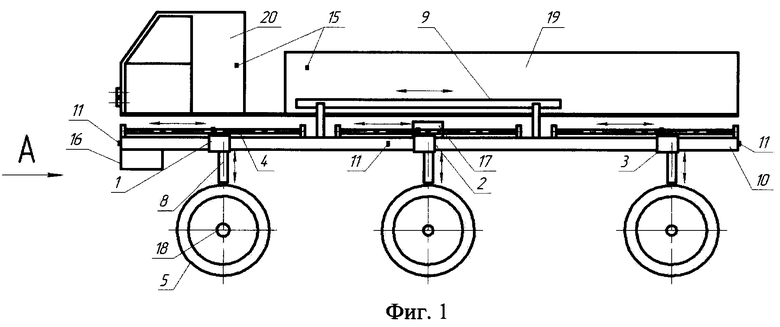
Устройство перемещения транспортного средства, состоящее из частей с механизмами поступательного перемещения, причем на каждой части установлен движитель, который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы, отличающееся тем, что дополнительно содержит механизм перемещения каждого из движителей в вертикальной плоскости относительно транспортного средства, механизм продольного перемещения кузова и кабины транспортного средства относительно его рамы, средства технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средства определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блок получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источник энергии, при этом механизм перемещения каждого из движителей в вертикальной плоскости закреплены на соответствующем им механизме продольного перемещения и соединены с соответствующим им движителем, при этом механизм поступательного перемещения каждого из движителей выполнен в виде механизма их продольного перемещения, при этом механизм продольного перемещения кузова и кабины закреплен на раме транспортного средства, при этом средства технического зрения и определения несущей способности опорной поверхности установлены на транспортном средстве, средства определения сцепных свойств опорной поверхности установлены на движителях, средства определения пространственного положения движителей и кузова с кабиной установлены соответственно на осях движителей и кузове с кабиной, при этом средства посредством способов передачи данных передают их на блок получения, обработки и выдачи информации, при этом блок получения, обработки и выдачи информации установлен на транспортном средстве и посредством способов получения данных получает их от средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения каждого из движителей и кузова с кабиной, обрабатывает и передает посредством способов передачи команды на включение или выключение работы источника энергии, при этом источник энергии установлен на транспортном средстве и посредством способов получения команд получает их от блока получения, обработки и выдачи информации и посредством способов передачи движения приводит в работу один или несколько механизмов из числа установленных на транспортном средстве, при этом количество источников энергии на транспортном средстве не менее одного, при этом движители, находящиеся на противоположных сторонах бортов транспортного средства, соединены между собой посредством осей, при этом количество осей с установленными на них движителями не менее трех.
| Ленточно-шлифовальный станок | 1985 |
|
SU1301661A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2189330C2 |
| Транспортное средство | 1981 |
|
SU981068A1 |

