Изобретение относится к транспортным средствам с движителями, а также к способам их передвижения.
Известно транспортное средство, содержащее хотя бы две части с механизмом поступательного перемещения, причем на каждой части установлен хотя бы один движитель, при этом движители соединены приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы (патент РФ №2189330 С2, опубл. 20.09.2002).
К недостаткам, препятствующим достижению требуемого технического результата при использовании устройства перемещения транспортного средства, относятся: недостаточная эффективность при перемещении по опорной поверхности с низкой несущей способностью пересеченным рельефом местности, косогорам; отсутствие возможности полной разгрузки от части собственного веса транспортного средства и перевозимого им груза, приходящегося на движители, поступательное движение которых выполняется в момент передвижения, что делает процесс продольного перемещения части транспортного средства затруднительным или влечет повышенные энергозатраты.
Наиболее близким устройством к заявленному является устройство перемещения транспортного средства, состоящее из частей с механизмами поступательного перемещения причем на каждой части установлен движитель, который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы, механизм перемещения каждого из движителей в вертикальной плоскости относительно транспортного средства, механизм продольного перемещения кузова и кабины транспортного средства относительно его рамы, средства технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средства определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блок получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источник энергии, при этом механизм перемещения каждого из движителей в вертикальной плоскости закреплены на соответствующем им механизме продольного перемещения и соединены с соответствующим им движителем, при этом механизм поступательного перемещения каждого из движителей выполнен в виде механизма их продольного перемещения, при этом механизм продольного перемещения кузова и кабины закреплен на раме транспортного средства, при этом средства технического зрения и определения несущей способности опорной поверхности установлены на транспортном средстве, средства определения сцепных свойств опорной поверхности установлены на движителях, средства определения пространственного положения движителей и кузова с кабиной установлены соответственно на осях движителей и кузове с кабиной, при этом средства посредством способов передачи данных передают их на блок получения, обработки и выдачи информации, при этом блок получения, обработки и выдачи информации установлен на транспортном средстве и посредством способов получения данных получает их от средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения каждого из движителей и кузова с кабиной, обрабатывает и передает посредством способов передачи команды на включение или выключение работы источника энергии, при этом источник энергии установлен на транспортном средстве и посредством способов получения команд получает их от блока получения, обработки и выдачи информации и посредством способов передачи движения приводит в работу один или нескольких механизмов из числа установленных на транспортном средстве, при этом количество источников энергии на транспортном средстве не менее одного, при этом движители, находящиеся на противоположных сторонах бортов транспортного средства, соединены между собой посредством осей, при этом количество осей с установленными на них движителями не менее трех (патент РФ №2782207 С1, опубл. 24.10.2022, бюл. №30).
К недостаткам, препятствующим достижению требуемого технического результата при использовании устройства перемещения транспортного средства, относятся: при затруднительном передвижении в прямолинейном направлении отсутствует техническая возможность передвижения транспортного средства и переноса центра тяжести в поперечном направлении относительно длинного борта транспортного средства, низкая эффективность при передвижении по косогорам.
Задача - повышение эффективности транспортных средств за счет расширения функциональных возможностей.
Технический результат - повышение эффективности транспортного средства при передвижении по опорной поверхности с низкой несущей способностью, пересеченным рельефом местности и склонам с возможностью выбора скоростного режима движения, способа передвижения и управления.
Указанный технический результат достигается устройством перемещения транспортного средства, состоящим из частей с механизмами поступательного перемещения, причем на каждой части установлен движитель, который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы, механизма перемещения каждого из движителей в вертикальной плоскости относительно транспортного средства, механизма продольного перемещения кузова и кабины транспортного средства относительно его рамы, средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блока получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источника энергии, согласно изобретению дополнительно содержит механизмы перемещения каждого из движителей в поперечном направлении относительно рамы транспортного средства, механизм поперечного перемещения кузова и кабины транспортного средства относительно его рамы, при этом механизмы перемещения движителей в поперечном направлении закреплены на механизмах их перемещения в вертикальной плоскости, механизм поперечного перемещения кузова и кабины закреплен на механизме продольного перемещения кузова и кабины или на раме транспортного средства, при этом минимальное количество движителей транспортного средства должно быть не менее четырех.
Изобретение поясняется чертежами.
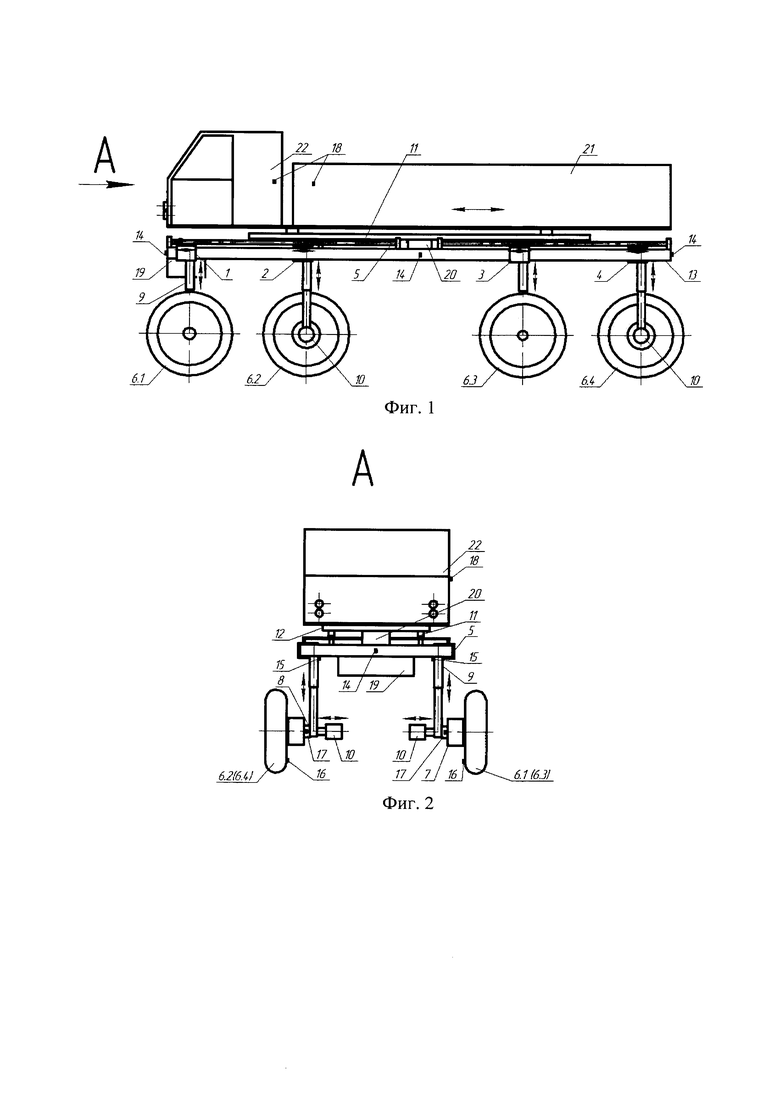
На фиг. 1 изображен вид общий.
На фиг. 2 - вид сбоку (вид А).
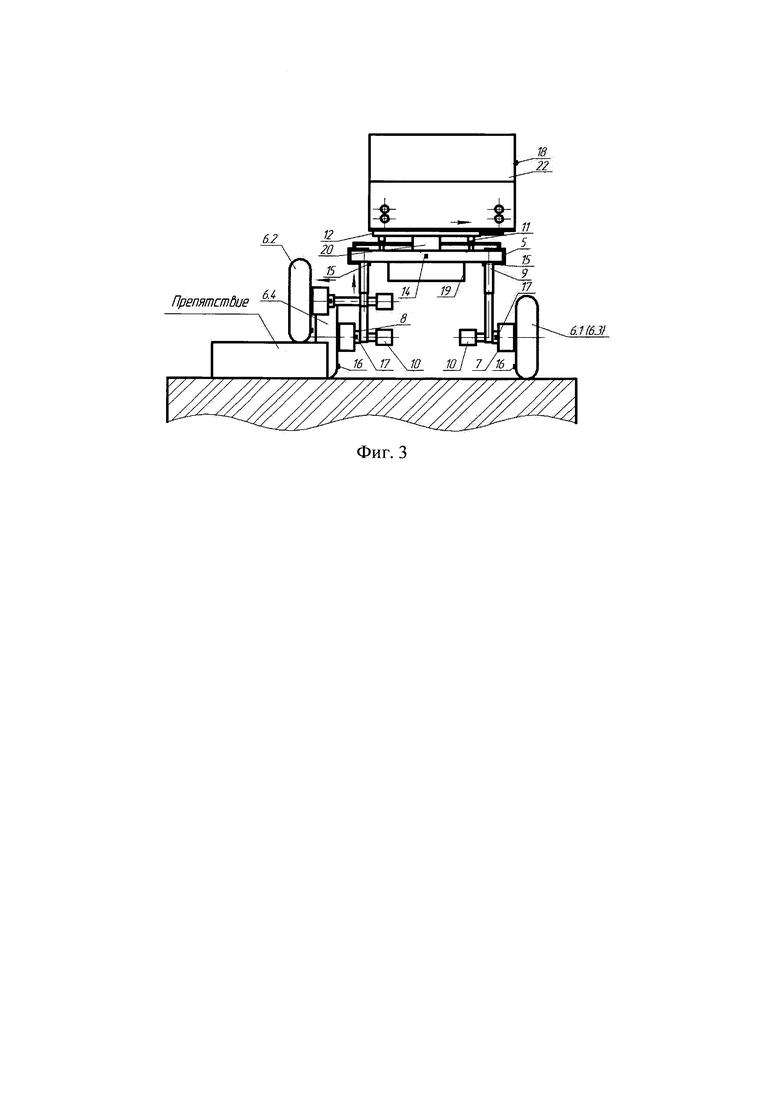
На фиг. 3 - схема способа передвижения транспортного средства по опорной поверхности с пересеченным рельефом местности.
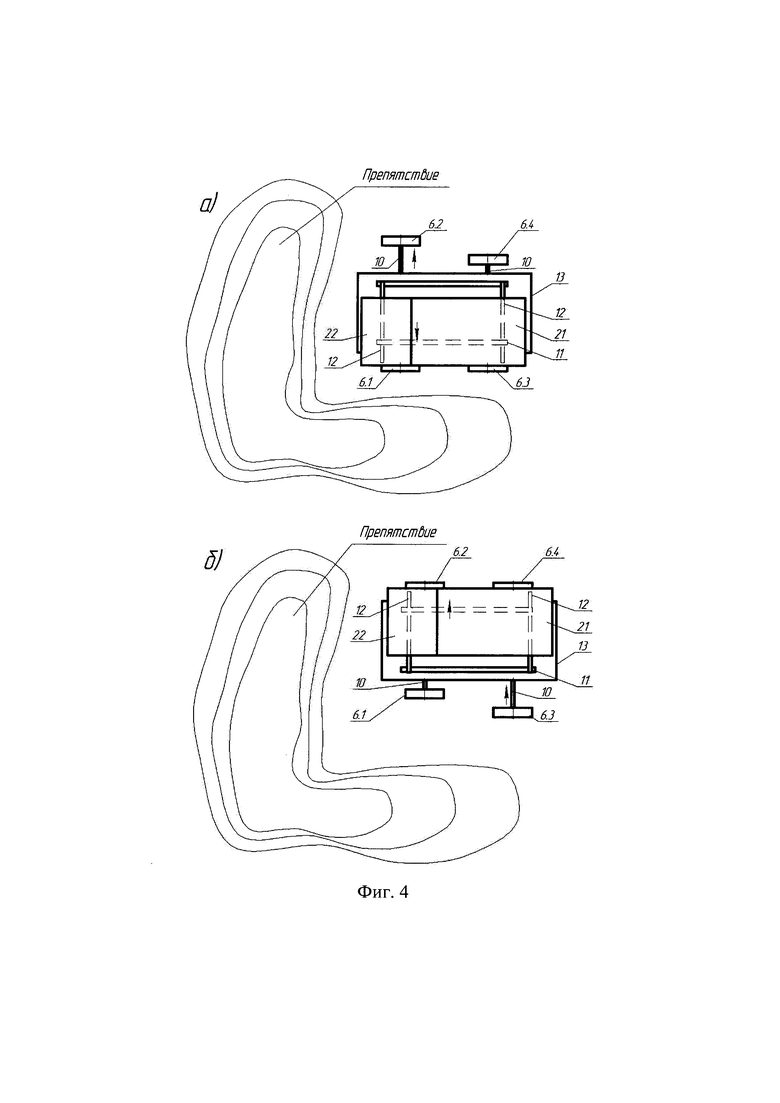
На фиг. 4 - схема преодоления движителем препятствия, расположенного на пути движения транспортного средства в продольном направлении.
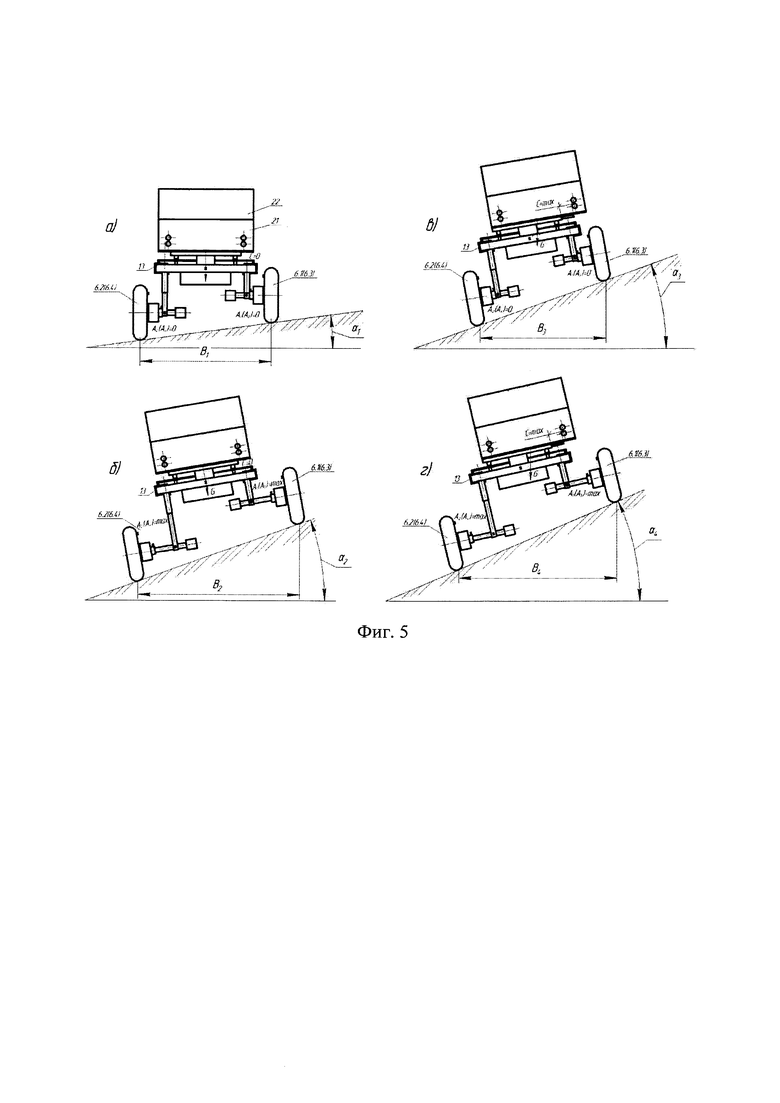
На фиг. 5 - схема способа передвижения транспортного средства по косогорам.
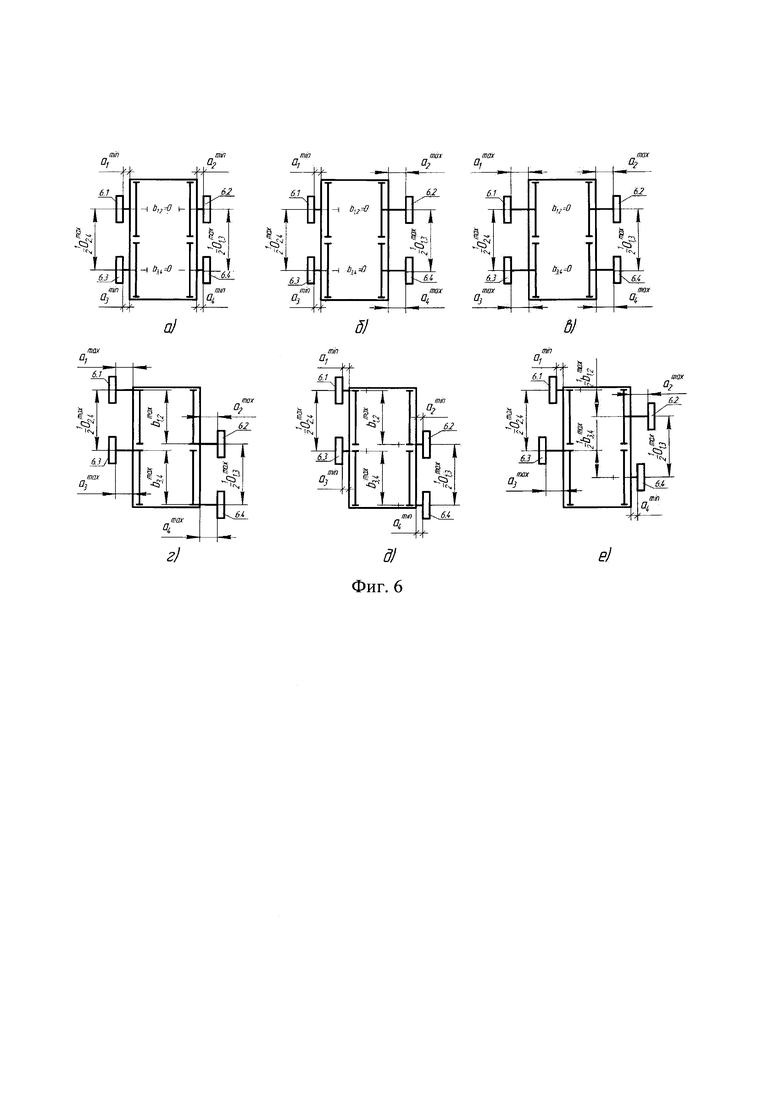
На фиг. 6 - схемы возможного расположения движителей.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Предлагаемое устройство перемещения транспортного средства состоит из четырех частей 1-4 с механизмами их поступательного перемещения 5, движителей 6.1-6.4, приводных механизмов вращения 7, устройства задания крутящего момента 8, механизмов перемещения движителей в вертикальной плоскости 9, механизмов перемещения движителей в поперечном направлении 10 относительно рамы транспортного средства, механизма продольного перемещения кузова и кабины 11, механизма поперечного перемещения кузова и кабины 12, рамы 13, средств технического зрения 14, средств определения несущей способности опорной поверхности 15, средств определения сцепных свойств 16 движителей с опорной поверхностью, средств определения пространственного положения движителей 17, средства определения пространственного положения кузова с кабиной 18, блока получения, обработки и выдачи информации 19, источника энергии 20, кузова 21 и кабины 22.
Части 1-4 с механизмами их поступательного перемещения 5 устанавливаются на раму 10 транспортного средства, причем к каждой из частей крепится механизм перемещения движителей в вертикальной плоскости 9, к которым в свою очередь крепятся механизмы перемещения движителей в поперечном направлении 10 относительно длинного борта транспортного средства.
Механизм перемещения каждого из движителей в поперечном направлении 10 может быть выполнен любым из известных технических решений (передача винт-гайка, гидроцилиндр, реечная передача и т.п.) и позволяет перемещать движители 6 без отрыва от опорной поверхности или с отрывом при включении в работу механизмов их перемещения в вертикальной плоскости 9 с последующей их установкой на новые участки опорной поверхности.
Каждый из движителей 6 транспортного средства за счет механизмов поступательного перемещения 5, механизмов перемещения в вертикальной плоскости 9 и механизмов перемещения в поперечном направлении 10 способен перемещаться и занимать технически возможное пространственное положение относительно рамы 13 транспортного средства и других движителей.
Механизм поперечного перемещения кузова и кабины 12 может быть закреплен на механизме продольного перемещения кузова и кабины 11 или на раме 13 транспортного средства и может быть выполнен любым из известных технических решений (передача винт-гайка, гидроцилиндр, реечная передача и т.п.) и позволяет перемещать кабину 22 и кузов 21, включая находящийся в нем груз, изменяя положение центра тяжести в поперечном направлении относительно рамы транспортного средства.
Кузов 21 и кабина 22 посредством механизмов их продольного 11 и поперечного перемещений 12 способны смещаться и занимать технически возможное пространственное положение относительно рамы 13 обеспечивая техническую возможность изменения положения центра тяжести транспортного средства при передвижении по опорной поверхности с низкой несущей способностью, пересеченным рельефом местности и косогорам.
Работа устройства перемещения транспортного средства осуществляется следующим образом.
При передвижении транспортного средства по опорной поверхности с отсутствием препятствий и устойчивой несущей способностью информация со средств технического зрения 14 (фиг. 1) и определения несущей способности опорной поверхности 15 (фиг. 2), средств определения ее сцепных свойств 16 (фиг. 2), средств определения пространственного положения движителей 17 (фиг. 2) и кузова с кабиной 18 (фиг. 1) поступает на блок получения, обработки и выдачи информации 19, который анализирует поступившую информацию и выдает управляющие команды на работу источника энергии 20, который посредством любого из известных технических решений передачи движения приводит в работу механизмы поступательного перемещения 5 частей 1-4, механизмы перемещения движителей 6.1-6.4 в вертикальной плоскости 9, механизмы перемещения движителей 6.1-6.4 в поперечном направлении 10 относительно рамы 13, механизм продольного 11 и поперечного 12 перемещения кузова и кабины относительно рамы 13 транспортного средства, с целью обеспечения их оптимального расположения в зависимости от типа и состояния опорной поверхности, а также выбранного способа передвижения. Далее блок получения, обработки и выдачи информации 19 подает управляющую команду на работу источника энергии 20, который_посредством любого из известных технических решений передачи движения через устройство задания крутящего момента 8 (фиг. 2) и приводной механизм вращения 7 подает на движители 6.1-6.4 крутящий момент, обеспечивая оптимальный при заданных условиях скоростной режим передвижения транспортного средства в продольном относительно кузова 21 и кабины 22 направлении способом качения.
Возможно передвижение транспортного средства по опорной поверхности с включением препятствий (подъемы, ямы и т.д.), включая участки с низкой несущей способностью, комбинированным способом - шагающим и движением качения, причем препятствие может находиться на пути передвижения как всех движителей транспортного средства, так и расположенных только по одну сторону любого из его бортов (фиг. 3). Информация со средств 14-18 поступает на блок получения, обработки и выдачи информации 19, который в зависимости от размера препятствия и его расположения относительно транспортного средства, характеристик сцепных свойств движителей с опорной поверхностью и характера ее несущей способности выдает управляющие команды на изменение способа передвижения одного или нескольких движителей в режим движения шагания. На фиг. 3 показан пример преодоления препятствия, расположенного на пути передвижения движителя 6.2, а затем и 6.4, расположенных по одну сторону борта транспортного средства. Для преодоления препятствия в режиме шагания от блока 19 поступает команда на источник энергии 20, который включает в работу механизмы продольного 11 и поперечного 12 перемещения кузова 21 и кабины 22 для распределения нагрузки от массы транспортного средства и перевозимого им груза на движители 6.1, 6.3, 6.4, разгружая движитель 6.2. Далее блок 19 выдает управляющие команды на работу механизмов 5, 9 и 10, которые обеспечивают в режиме шагания перенос и постановку движителя 6.2 на новый участок опорной поверхности, включая поверхность препятствия. Затем блок 19 выдает управляющую команду источнику энергии 20, который включает в работу механизмы 11 и 12, которые с учетом информации, поступающей от средств 14-18, распределяют нагрузку на все движители 6.1-6.4. Далее блок 19 выдает управляющие команды конструктивным элементам 7, 8 и 20 транспортного средства на его передвижение в режиме качения до момента пока от средств 14, 17 не поступит команда не необходимость изменения способа движения для перемещения в режиме шагания движителя 6.4, перенос которого аналогичен последовательности переноса движителя 6.2. У транспортного средства имеется техническая возможность перемещать в режиме шагания одновременно два движителя расположенных как с одной стороны борта, так и с разных.
Возможно передвижение транспортного средства шагающим способом в поперечном направлении относительно кузова 21 и кабины 22 (фиг. 4, а) в случае если на пути передвижения транспортного средства в продольном относительно кузова 21 и кабины 22 направлении имеется препятствие, преодолеть которое невозможно и выполнить на опорной поверхности с низкой несущей способностью и стремящихся к нулю сцепных свойствах маневры разворота или поворота транспортного средства не представляется возможным. Информация со средств 14-16 (фиг. 1, 2) поступает на блок 19, который выдает управляющую команду источнику энергии 20 на переход движения в режим шагания в поперечном направлении. В работу приводятся механизмы продольного 11 и поперечного 12 перемещения кузова 21 и кабины 22 для распределения нагрузки от массы транспортного средства и перевозимого им груза на движители 6.1, 6.3, 6.4. Далее движитель 6.2 за счет последовательной работы механизмов 9 (фиг. 1), 10 отрывается от опорной поверхности, перемещается от рамы 13 в направлении перпендикулярном кузову 21 и кабины 22 транспортного средства и опускается на новый участок опорной поверхности. Перемещение движителя 6.4 происходит аналогичным образом. Перемещение рамы 13 с кузовом 22 и кабиной 21 (фиг. 4, б) выполняется за счет одновременной работы механизмов 10 всех движителей 6.1-6.4, причем механизмы 10 движителей 6.2 и 6.4 работают в тянущем режиме, а движителей 6.1 и 6.3 в толкающем. Перемещение движителей 6.1 и 6.3 происходят аналогично движителю 6.2 и далее цикл повторяется до момента преодоления препятствия или смещения до опорной поверхности с устойчивой несущей способностью.
Наличие в конструкции транспортного средства механизмов 10, 9 и 12 (фиг. 1) дает соответственно возможность изменять ширину колеи, занимать разное по вертикали положение движителей и изменять положение центра тяжести в поперечные относительны кузова 22 и кабины 21 направлении, что определяет возможность использования транспортного средства по опорной поверхности с пересеченным рельефом местности и косогорам. На фиг. 5 показаны возможные схемы передвижения транспортного средства по опорной поверхности с пересеченным рельефом и косогорам. На фиг. 5, а показана схема передвижения транспортного средства по опорной поверхности с уклоном а1, причем смещение движителей 6.1-6.4 в поперечном относительно кузова и кабины направлении равно А2,А4=0, А1,А3=0 и смещение кузова 22 и кабины 21 относительно рамы 13 С=0. На фиг. 5, б показана схема передвижения транспортного средства по опорной поверхности с уклоном а2, причем а2>а1, а смещение движителей 6.1-6.4 равно А2,А4=max, А1,А3=max, смещение кузова 22 и кабины 21 относительно рамы 13 С=0. На фиг. 5, в показана схема передвижения транспортного средства по опорной поверхности с уклоном а3, причем а3≥а2, а смещение движителей 6.1-6.4 равно А2,А4=0, А1,А3=0, смещение кузова 22 и кабины 21 относительно рамы 13 С=max. На фиг. 5, г показана схема передвижения транспортного средства по опорной поверхности с уклоном а4, причем а4>а3, а смещение движителей 6.1-6.4 равно А2,А4=max, А1,А3=max, смещение кузова 22 и кабины 21 относительно рамы 13 С=max.
Выбор схемы возможного расположения движителей 6.1-6.4 (фиг. 1) при передвижении по опорной поверхности зависит от ее состояния и типа грунта, рельефа земли, наличия препятствий на пути передвижения, величины загрузки транспортного средства и необходимой продольной и поперечной устойчивости. Некоторые схемы возможного расположения движителей представлены на фиг. 6: на фиг. 6, а движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии
по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии  на фиг. 6, б движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии
на фиг. 6, б движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии
по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии  на фиг. 6, в движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии
на фиг. 6, в движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии
по разные стороны - b1,2=0, b3,4=0 и смещены от рамы транспортного средства на расстоянии  на фиг. 6, г движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии
на фиг. 6, г движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны -
по разные стороны -  и смещены от рамы транспортного средства на расстоянии
и смещены от рамы транспортного средства на расстоянии  на фиг. 6, д движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии
на фиг. 6, д движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны -
по разные стороны -  и смещены от рамы транспортного средства на расстоянии
и смещены от рамы транспортного средства на расстоянии  на фиг. 6, е движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии
на фиг. 6, е движители, расположенные по одну сторону бортов транспортного средства, находятся на расстоянии  по разные стороны -
по разные стороны -  и смещены от рамы транспортного средства на расстоянии
и смещены от рамы транспортного средства на расстоянии 
При передвижении по опорной поверхности способ передвижения может изменяться и выбирается в зависимости от состояния несущей способности опорной поверхности, рельефа местности и наличия препятствий и возможных технических решений, заложенных в устройство транспортного средства.
Способ управления транспортным средством при передвижении различными способами и с различным скоростным режимом может осуществляться в автоматическом режиме или при участии водителя.
Таким образом, заявленное устройство повышает эффективность транспортного средства при передвижении по опорной поверхности с низкой несущей способностью, пересеченным рельефом местности и склонах, с возможностью выбора скоростного режима движения, способа передвижения и управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передвижения транспортного средства | 2022 |
|
RU2782207C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| ВНЕДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2199463C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ АВАРИЙНО-СПАСАТЕЛЬНЫЙ | 2007 |
|
RU2337855C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
Изобретение относится к транспортным средствам с движителями. Устройство перемещения транспортного средства состоит из частей с механизмами поступательного перемещения, на каждой из которых установлен движитель, соединенный с приводным механизмом и механизмом поступательного перемещения, механизма перемещения каждого из движителей в вертикальной плоскости, механизма продольного перемещения кузова и относительно его рамы, средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блока получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источника энергии, механизмов перемещения каждого из движителей в поперечном направлении относительно рамы транспортного средства, механизма поперечного перемещения кузова и кабины транспортного средства относительно его рамы. Достигается повышение эффективности транспортного средства при передвижении по опорной поверхности с низкой несущей способностью, пересеченным рельефом местности и склонам с возможностью выбора скоростного режима движения, способа передвижения и управления. 6 ил.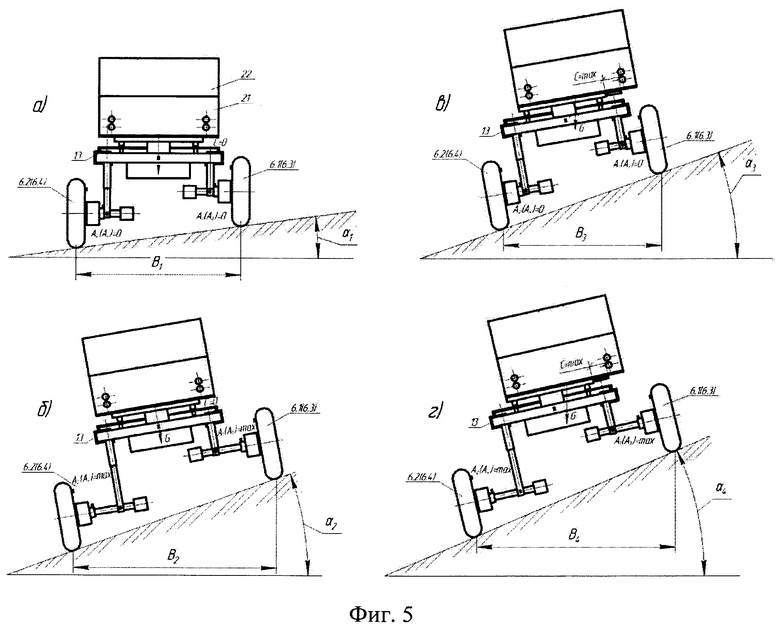
Устройство перемещения транспортного средства, состоящее из частей с механизмами поступательного перемещения, причем на каждой части установлен движитель, который соединен с приводным механизмом вращения через устройство задания крутящего момента с возможностью управления им и механизмом поступательного перемещения в зависимости от параметров почвы, механизма перемещения каждого из движителей в вертикальной плоскости относительно транспортного средства, механизма продольного перемещения кузова и кабины транспортного средства относительно его рамы, средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения движителей и кузова с кабиной относительно рамы транспортного средства, блока получения, обработки и выдачи информации для выбора возможного способа и скорости передвижения транспортного средства, источника энергии, при этом механизм перемещения каждого из движителей в вертикальной плоскости закреплен на соответствующем им механизме продольного перемещения и соединен с соответствующим им движителем, при этом механизм поступательного перемещения каждого из движителей выполнен в виде механизма их продольного перемещения, при этом механизм продольного перемещения кузова и кабины закреплен на раме транспортного средства, при этом средства технического зрения и определения несущей способности опорной поверхности установлены на транспортном средстве, средства определения сцепных свойств опорной поверхности установлены на движителях, средства определения пространственного положения движителей и кузова с кабиной установлены соответственно на осях движителей и кузове с кабиной, при этом средства посредством способов передачи данных передают их на блок получения, обработки и выдачи информации, при этом блок получения, обработки и выдачи информации установлен на транспортном средстве и посредством способов получения данных получает их от средств технического зрения, определения несущей способности опорной поверхности и ее сцепных свойств, а также средств определения пространственного положения каждого из движителей и кузова с кабиной, обрабатывает и передает посредством способов передачи команды на включение или выключение работы источника энергии, при этом источник энергии установлен на транспортном средстве и посредством способов получения команд получает их от блока получения, обработки и выдачи информации и посредством способов передачи движения приводит в работу один или нескольких механизмов из числа установленных на транспортном средстве, при этом количество источников энергии на транспортном средстве не менее одного, отличающееся тем, что дополнительно содержит механизмы перемещения каждого из движителей в поперечном направлении относительно рамы транспортного средства, механизм поперечного перемещения кузова и кабины транспортного средства относительно его рамы, при этом механизмы перемещения движителей в поперечном направлении закреплены на механизмах их перемещения в вертикальной плоскости, механизм поперечного перемещения кузова и кабины закреплен на механизме продольного перемещения кузова и кабины или на раме транспортного средства, при этом минимальное количество движителей транспортного средства должно быть не менее четырех.
| Устройство передвижения транспортного средства | 2022 |
|
RU2782207C1 |
| Транспортное средство | 1981 |
|
SU981068A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| СПОСОБ ОБРАЗОВАНИЯ ВОЛН ДВИЖУЩИХ СИЛ В КОЛЕСНОМ ТРАНСПОРТНОМ СРЕДСТВЕ И УНИВЕРСАЛЬНЫЙ КОЛЕСНЫЙ ВЕЗДЕХОД, ЕГО РЕАЛИЗУЮЩИЙ | 2010 |
|
RU2425774C1 |
| JP 2009234534 A, 15.10.2009. | |||

