Изобретение относится к транспортным средствам, а именно к тягово-транспортным и энергетическим средствам сельскохозяйственного назначения, и может быть использовано для построения самоходных беспилотных сельскохозяйственных агрегатов.
Прототипом беспилотного тягово-энергетического модуля является автоматизированный комплекс устройств для ухода за плантацией растений и способ ухода за плантацией растений (патент РФ на изобретение № 2477037, МПК A01B 79/02, A01B 49/00, 2013), состоящий из хотя бы одной рабочей платформы и из хотя бы одной сервисной платформы, каждая из которых включает в себя несущую платформу, движитель с приводом, узел изменения направления движения платформы, энергетический узел, топливный узел и коммуникации между ними, узел управления, узел информационной связи с другими устройствами комплекса, датчик количества энергии, датчик количества топлива, узел хранения и обмена технологическими грузами, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, топливом, материалами и сменными модулями с рабочими органами, датчик для определения положения платформы относительно плантации, датчик количества технологических грузов, датчик состояния сменных модулей.
Основными недостатками предложенного решения является сложность и высокая металлоемкость конструкции, высокие энергозатраты на выполнение технологических операций, обусловленные необходимостью создания и эксплуатации двух типов платформ, низкая производительность множества отдельных платформ.
Известен способ и устройство многомашинного агрегатирования трактора (патент РФ на изобретение №2465759, МПК A01B 59/044, 2008), включающий использование трактора с навешиваемыми на его штатную навесную систему машинами и связанной с ним платформы, в котором машины навешивают или прицепляют последовательно на штатную навесную систему трактора и независимую, дублирующую навесную систему, расположенную сзади на прицепной платформе, соединяемой с трактором независимо от штатной навесной системы.
Основными недостатками предложенного решения является сложность и высокая металлоемкость конструкции, высокие энергозатраты на выполнение технологических операций, ограниченная сфера применения.
Прототипом способа агрегатирования тягово-энергетического модуля с сельскохозяйственными машинами является способ агрегатирования набора сменяемых модулей-адаптеров и блоков из них с энергосредством для выполнения механизированных работ при производстве сельскохозяйственной продукции и средство для его осуществления (патент РФ на изобретение № 2431954, МПК А01B 59/00, 2011), заключающийся в том, что энергосредство агрегатируют с сельскохозяйственной машиной. Способ реализуется путем сочетания традиционных навешивания и присоединения к энергосредству сменяемых модулей-адаптеров и блоков из них, а также отсоединения из блоков по крайней мере одного модуля-адаптера и установки его сверху на раму энергосредства с помощью погрузочного устройства, реализующего несколько вариантов замены (установки и снятия) модулей-адаптеров. Средство включает энергосредство в составе ходового шасси с рамой, поперечно перемещаемой на последней, кабины управления, силовой установки снизу рамы, навесных и прицепных устройств, приводов и коммуникаций для рабочих органов модулей-адаптеров, погрузочное устройство и набор сменяемых модулей-адаптеров, навешиваемых и присоединяемых к раме энергосредства, а также устанавливаемых сверху на его раму.
Недостатками данного способа и средства является сложность и высокая металлоемкость конструкции, высокие энергозатраты на выполнение технологической операции, низкий уровень унификации машин различной мощности между собой, высокое удельное давление на почву при работе агрегата, в частности при выполнении пропашных работ.
Задачи изобретения – упрощение конструкции и снижение металлоемкости сельскохозяйственных агрегатов, повышение их производительности, снижение энергозатрат на выполнение технологических операций, снижение себестоимости выполнения работ, снижение удельного давления на почву, в частности при выполнении пропашных работ, повышение уровня унификации тягово-энергетических средств сельскохозяйственного назначения и агрегатируемых с ними сельскохозяйственных машин.
Технический результат достигается тем, что в беспилотном тягово-энергетическом модуле сельскохозяйственного назначения, включающем несущую платформу, движитель с приводом, узел изменения направления движения платформы, энергетический узел, топливный узел и коммуникации между ними, узел управления, узел информационной связи с другими устройствами комплекса, датчики количества энергии и топлива, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, датчик определения положения платформы относительно плантации, контрольно-управляющее устройство и устройство мониторинга состояния плантации, каждый из которых включает в себя узел управления и узел связи, устройство мониторинга состояния плантации с датчиком состояния плантации, согласно изобретению, узел изменения направления движения снабжен размещенной над несущей платформой поворотной платформой, установленной с возможностью поворота в горизонтальной плоскости на 360⁰ относительно центра несущей платформы, стыковочно-обменный узел снабжен сцепным устройством, соединенным с поворотной платформой при помощи как минимум двух гидро- или электроцилиндров с возможностью изменения его положения относительно поворотной платформы в вертикальной плоскости.
Кроме того, сцепное устройство снабжено подвижным и неподвижным захватами в форме угловой балки, обеспечивающими жесткую фиксацию прямоугольной рамы сельскохозяйственной машины между ними, при этом неподвижный захват жестко закреплен на сцепном устройстве, а подвижный захват шарнирно присоединен к сцепному устройству с помощью как минимум двух гидро- или электроцилиндров, сцепное устройство снабжено горизонтальным шарниром, установленным с возможностью поворота на ±20⁰ относительно тягово-энергетического модуля в перпендикулярной продольной оси тягово-энергетического модуля плоскости, при этом тягово-энергетический модуль снабжен, как минимум, одним выносным гидро- или электродвигателем с гибкими линиями передачи рабочей жидкости или электрической энергии, движитель выполнен двухколесным с электроприводом, при этом колеса расположены последовательно, либо гусеничным с резиноармированными гусеницами с электроприводом.
Технический результат достигается тем, что в способе агрегатирования по меньшей мере одного беспилотного тягово-энергетического модуля сельскохозяйственного назначения с сельскохозяйственными машинами, заключающемся в том, что по меньшей мере один беспилотный тягово-энергетический модуль сельскохозяйственного назначения агрегатирует с сельскохозяйственной машиной, согласно изобретения, к раме сельскохозяйственной машины сцепными устройствам присоединяют как минимум два беспилотных тягово-энергетических модуля сельскохозяйственного назначения, кроме того, при присоединении беспилотных тягово-энергетических модулей сельскохозяйственного назначения проводят синхронизацию параметров их работы, согласуют скорости и траектории движения, плавность хода, подъем и опускание машины, обмен данными между беспилотными тягово-энергетическими модулями сельскохозяйственного назначения осуществляют через узел информационной связи по беспроводной сети, часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения используют для привода активных рабочих органов сельскохозяйственной машины, а другая часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения создает необходимое тяговое усилие.
Изобретение поясняется чертежами.
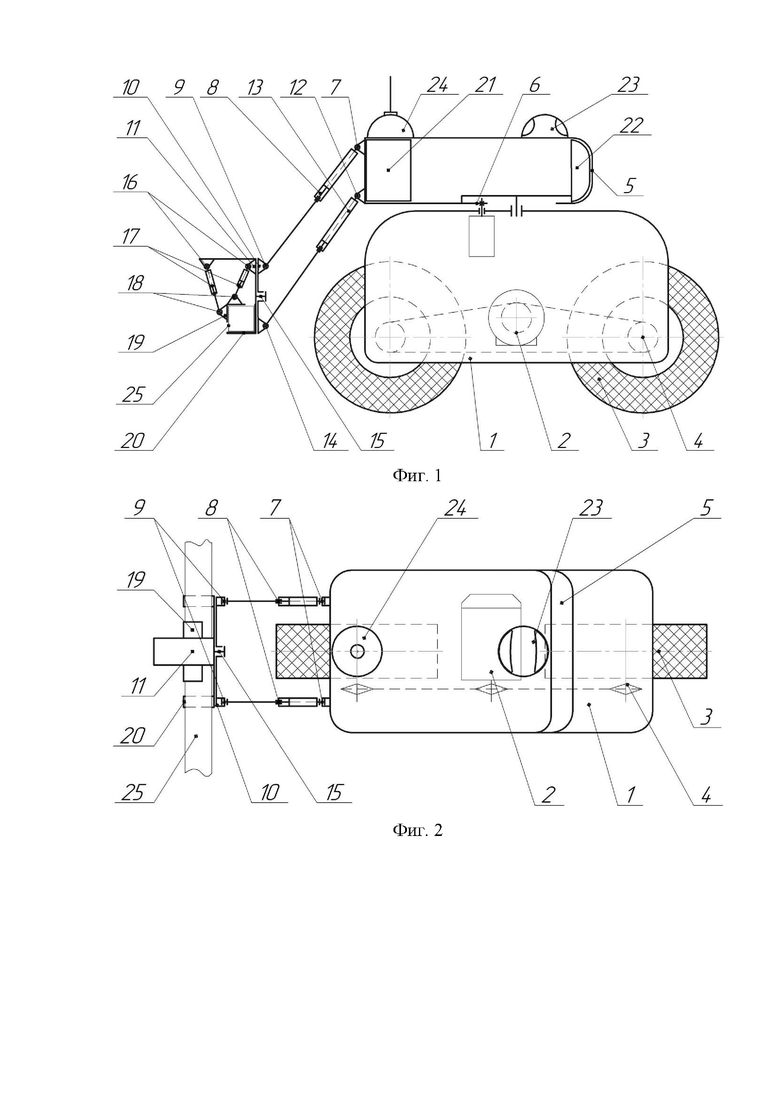
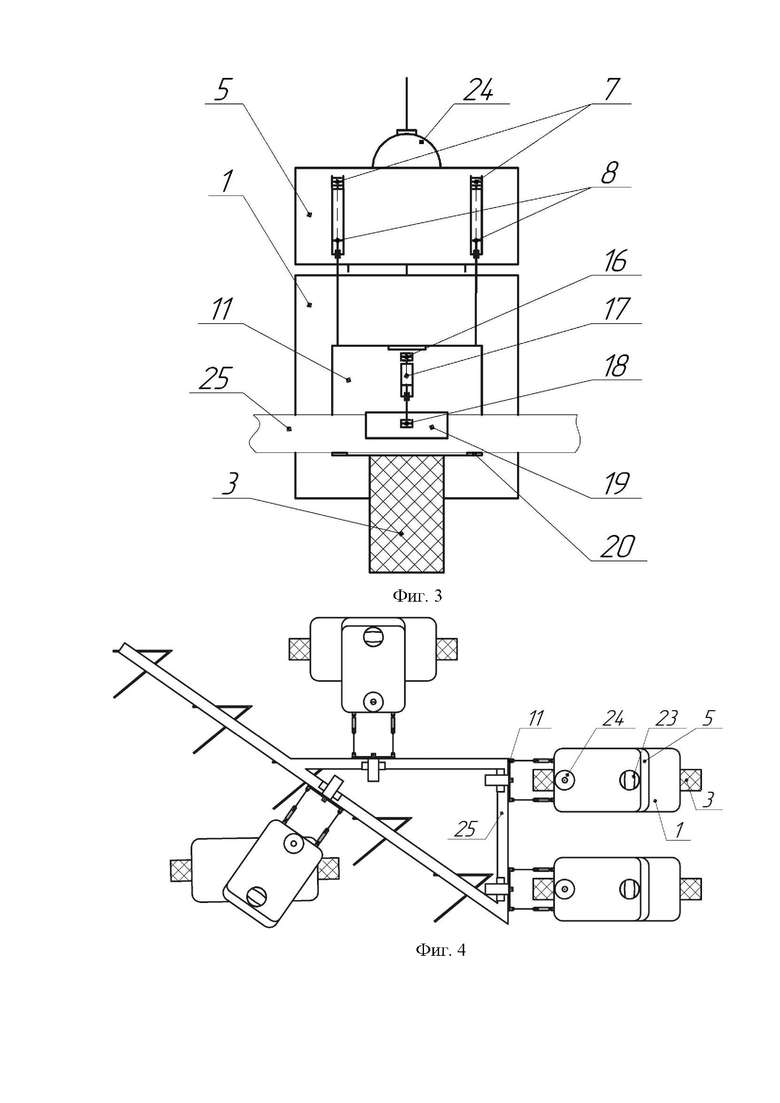
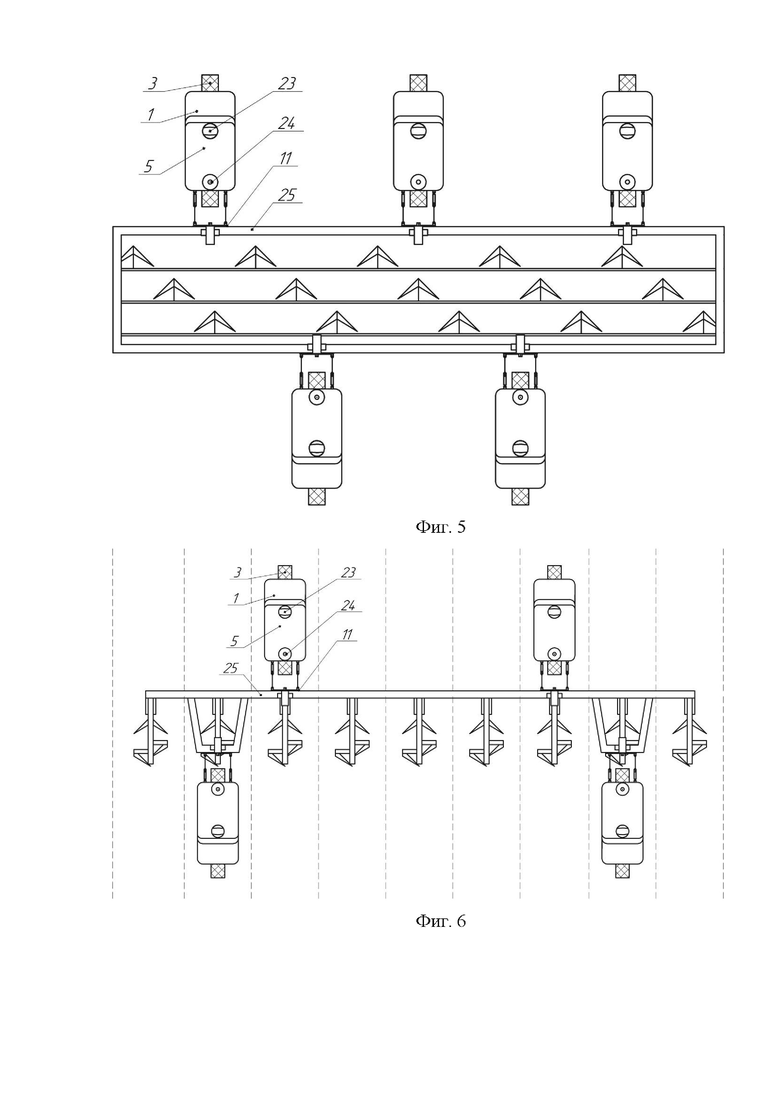
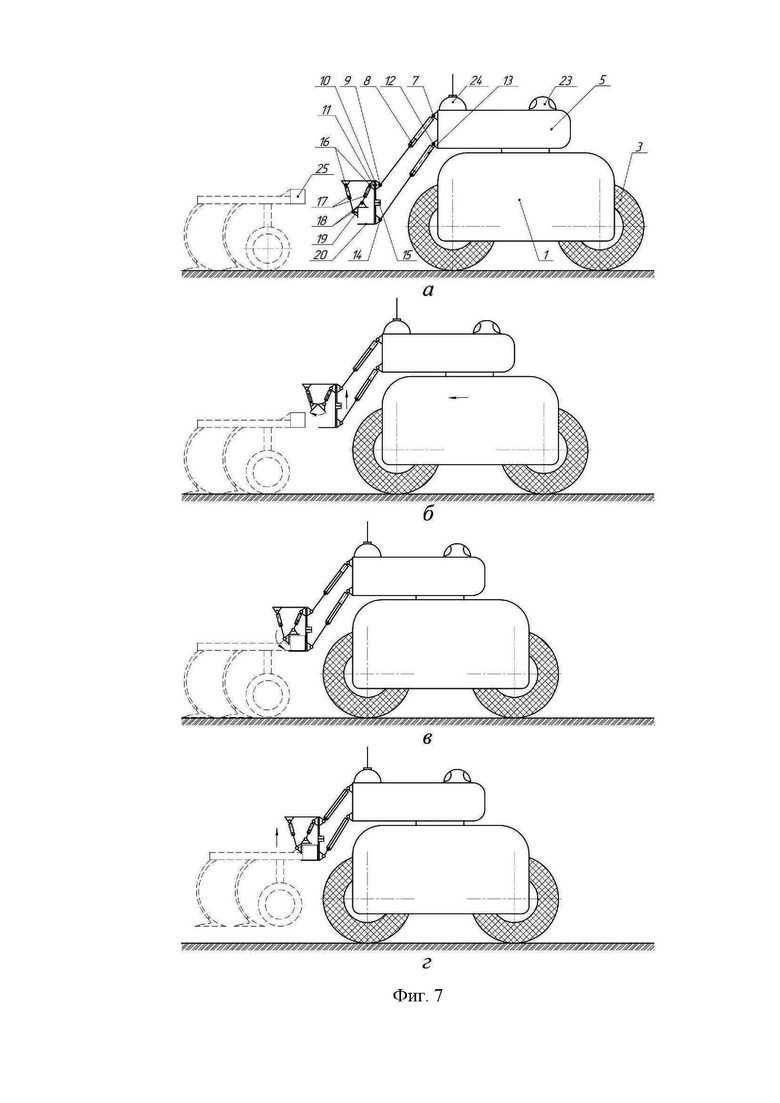
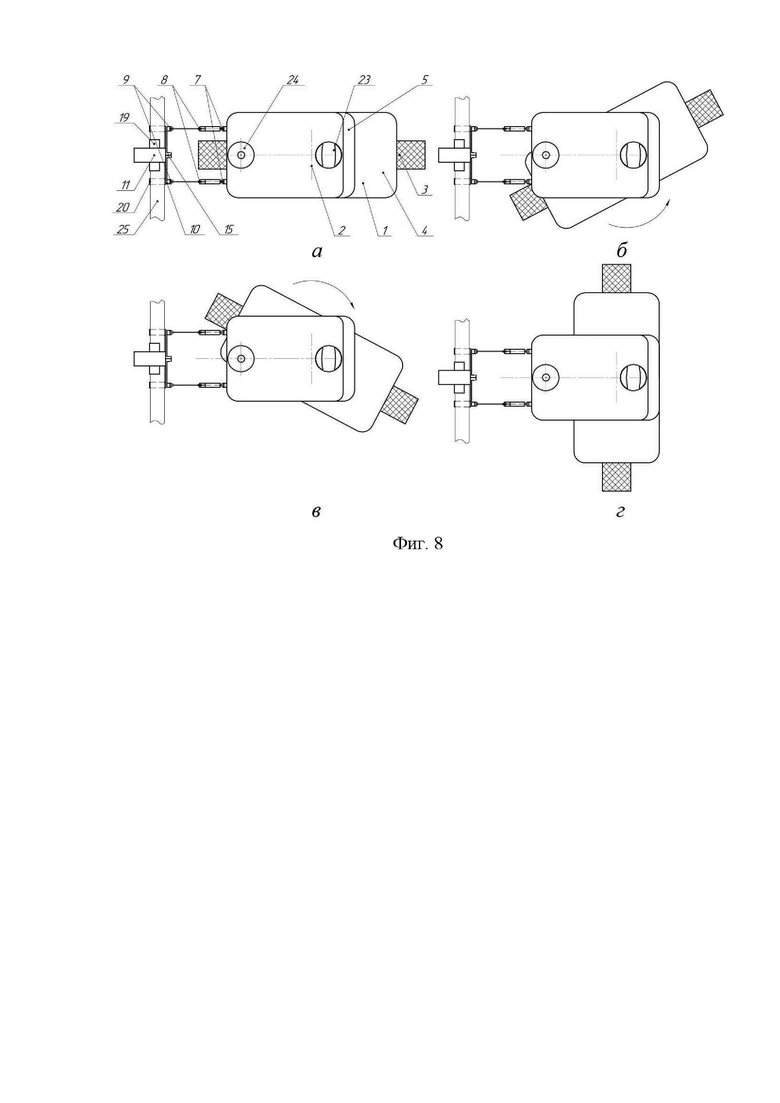
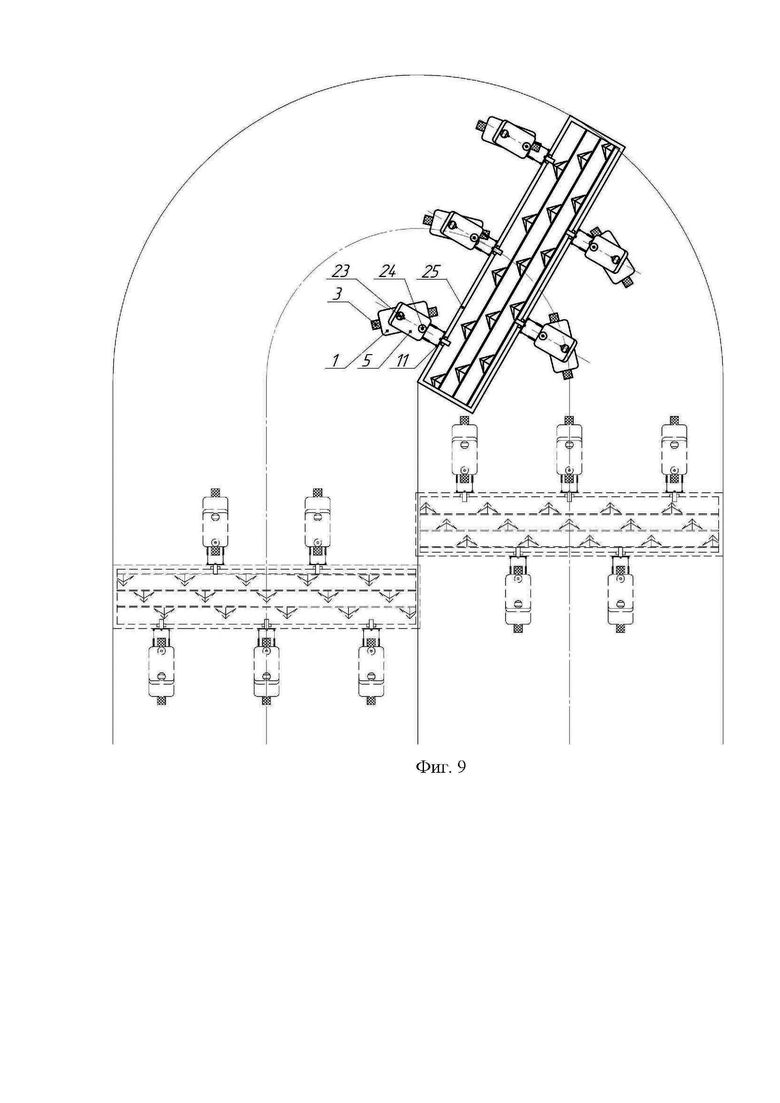
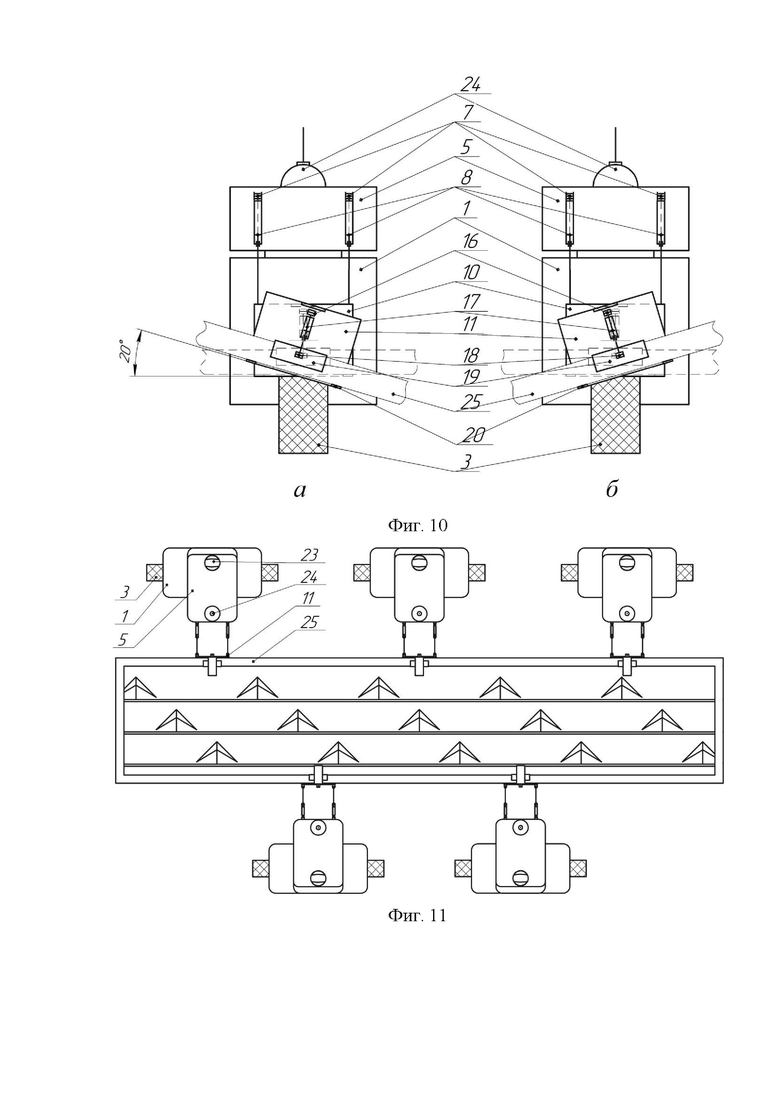
На фиг. 1 представлен общий вид беспилотного тягово-энергетического модуля; на фиг. 2 показан вид беспилотного тягово-энергетического модуля сверху; на фиг. 3 - вид беспилотного тягово-энергетического модуля сзади; на фиг. 4 - вариант агрегатирования нескольких беспилотных тягово-энергетических модулей с плугом; на фиг. 5 - вариант агрегатирования нескольких беспилотных тягово-энергетических модулей с культиватором для сплошной обработки почвы; фиг. 6 - вариант агрегатирования нескольких беспилотных тягово-энергетических модулей с междурядным культиватором; фиг. 7 - процесс стыковки беспилотного тягово-энергетического модуля с рамой сельскохозяйственной машины; фиг. 8 - реализация поворота беспилотного тягово-энергетического модуля; фиг. 9 - вариант реализации поворота агрегата из нескольких беспилотных тягово-энергетических модулей и культиватора для сплошной обработки почвы; фиг. 10 - реализация изменения угла наклона тягово-энергетического модуля относительно рамы сельскохозяйственной машины в вертикальной плоскости; фиг. 11 - схема расположения нескольких тягово-энергетических модулей в агрегате с культиватором для сплошной обработки почвы в транспортном положении.
Беспилотный тягово-энергетический модуль сельскохозяйственного назначения включает несущую платформу 1, энергетический узел 2, движитель 3 с приводом 4, поворотную платформу 5 с механизмом поворота 6, как минимум два верхних горизонтальных шарнира 7, как минимум два верхних гидравлических или электрических цилиндра 8, как минимум два горизонтальных шарнира 9, поворотную площадку 10, сцепное устройство 11, как минимум два нижних горизонтальных шарнира 12, как минимум два нижних гидравлических или электрических цилиндра 13, как минимум два горизонтальных шарнира 14, горизонтальный шарнир 15, как минимум два горизонтальных шарнира 16, как минимум два гидро- или электроцилиндра 17, как минимум два горизонтальных шарнира 18, как минимум один подвижный захват рамы сельскохозяйственной машины 19, как минимум один жестко закрепленный на сцепном устройстве 11 неподвижный захват рамы сельскохозяйственной машины 20, блок элементов гидравлической системы 21, блок элементов системы управления 22, блок внешних датчиков 23, элементы системы приема-передачи информации 24.
Несущая платформа 1 представляет собой единую пространственную конструкцию. Энергетический узел 2 представляет собой дизель-генераторную установку с топливным баком, либо блок аккумуляторных батарей. Движитель 3 выполнен двухколесным с электроприводом, при этом колеса расположены последовательно, либо гусеничным с резиноармированными гусеницами с электроприводом. Привод движителей 4 осуществляется от электрического двигателя, запитываемого через систему силовой электроники от энергетического узла. Несущая платформа 1 в верхней части соединена с поворотной платформой 5, управляемой механизмом поворота 6, обеспечивающим поворот платформ 1 и 5 относительно друг друга вокруг вертикальной оси, проходящей через центр несущей платформы на угол 360⁰. Поворотная платформа 5 через как минимум два верхних горизонтальных шарнира 7 соединена с как минимум двумя верхними гидро- или электроцилиндрами 8, которые другим своим концом через горизонтальный шарниры 9 сопряжены с поворотной площадкой 10. Поворотная платформа 5 через как минимум два нижних горизонтальных шарнира 12 соединены с как минимум двумя нижними гидро- или электроцилиндрами 13, которые другим своим концом через горизонтальные шарниры 14 сопряжены с поворотной площадкой 10. Гидро- или электроцилиндры 8 и 13 позволяют изменять расположение поворотной площадки 10 относительно поворотной платформы 5 в вертикальной плоскости. Поворотная площадка 10 имеет горизонтальный шарнир 15, за счет которого обеспечивается возможность поворота сцепного устройства 11 с зафиксированной в нем рамой сельскохозяйственной машины 25 относительно поворотной платформы 5 в вертикальной плоскости. Сцепное устройство 11 включает в себя два горизонтальных шарнира 16, которые посредством двух гидро- или электроцилиндров 17 через горизонтальные шарниры 18 соединены с подвижным захватом рамы сельскохозяйственной машины 19, а также неподвижный захват рамы сельскохозяйственной машины 20, который жестко закреплен на сцепном устройстве 11. Энергетический узел 2, включающий дизель-генераторную установку и ее технологическое оборудование (заправочные емкости, элементы системы охлаждения и т.п.) в случае использования гибридного электропривода, либо блоки аккумуляторных батарей с силовой электроникой в случае простого электропривода, а также блок элементов гидравлической системы 21 (гидробак, гидронасосы с приводом, гидравлические распределители с электронным управлением и т.п.) располагаются в свободном пространстве несущей платформы 1 и поворотной платформы 5. Блок элементов системы управления беспилотного тягово-энергетического модуля сельскохозяйственного назначения 22 осуществляет контроль и управление параметрами работы беспилотного тягово-энергетического модуля сельскохозяйственного назначения и располагается в свободном пространстве поворотной платформы 5. На внешней части корпуса поворотной платформы 5 располагается блок внешних датчиков 23, отслеживающих ситуацию вокруг беспилотного тягово-энергетического модуля сельскохозяйственного назначения, положение беспилотного тягово-энергетического модуля сельскохозяйственного назначения в пространстве относительно рамы сельскохозяйственной машины 25 и т.п., и элементы системы приёма-передачи данных 24.
Беспилотный тягово-энергетический модуль сельскохозяйственного назначения агрегатируется с сельскохозяйственными машинами следующим образом.
Перед началом выполнения работ производят стыковку беспилотных тягово-энергетических модулей сельскохозяйственного назначения с рамой сельскохозяйственной машины 25 в специально отведенных точках, определяемых исходя из требований к выполняемой операции, типа сельскохозяйственной машины, числа агрегатируемых с сельскохозяйственной машиной беспилотных тягово-энергетических модулей сельскохозяйственного назначения, почвенно-климатических и других условий.
Стыковку каждого отдельного беспилотного тягово-энергетического модуля сельскохозяйственного назначения и сельскохозяйственной машины производят путем жесткого присоединения сцепного устройства 11 к раме сельскохозяйственной машины 25 за счет ее фиксации между неподвижным захватом 20, жестко закрепленном на сцепном устройстве 11, и подвижным захватом 19 за счет перемещения штоков гидро- или электроцилиндров 17.
После присоединения всех беспилотных тягово-энергетических модулей сельскохозяйственного назначения осуществляют синхронизацию параметров их работы, обеспечивающую согласование скорости и траекторий движения, плавности хода, подъема и опускания сельскохозяйственной машины, при этом обмен данными между беспилотными тягово-энергетическими модулями сельскохозяйственного назначения осуществляется по беспроводной сети с помощью устройств приема-передачи данных 24. Подъем и опускание сельскохозяйственной машины относительно опорной поверхности при переводе в транспортное или рабочее положения осуществляется за счет перемещения штоков гидро- или электроцилиндров 8 и 13 всех беспилотных тягово-энергетических модулей сельскохозяйственного назначения.
Перемещение сформированного таким образом агрегата осуществляется за счет приведения в движение движителей 3 каждого беспилотного тягово-энергетического модуля сельскохозяйственного назначения посредством имеющих возможность реверсирования синхронных приводов 4, питаемых от энергетического узла 2.
Изменение траектории движения, сформированного таким образом агрегата, осуществляется посредством поворота несущей платформы 1 каждого беспилотного тягово-энергетического модуля сельскохозяйственного назначения относительно поворотной платформы 5 при помощи механизма поворота 6 на определенный для каждого беспилотного тягово-энергетического модуля сельскохозяйственного назначения угол, обеспечивающий плавный поворот агрегата.
Возможность поворота поворотных платформ относительно несущих платформ беспилотных тягово-энергетических модулей сельскохозяйственного назначения на угол в 360о и реверсирование привода ходовой системы позволяет реализовать различные типы разворота, обеспечивая тем самым минимальные затраты времени на разворот и минимальные размеры разворотной полосы.
Корректировка положения рамы сельскохозяйственной машины относительно опорной поверхности осуществляется за счет перемещения штоков гидравлических или электрических цилиндров 8 и 13 на определенную для каждого беспилотного тягово-энергетического модуля сельскохозяйственного назначения длину. Таким образом, сельскохозяйственная машина полностью опирается на беспилотные тягово-энергетические модули сельскохозяйственного назначения, которые поддерживают необходимое расстояние между рамой сельскохозяйственной машины и опорной поверхностью, в связи с чем исчезает необходимость использования опорных колес на сельскохозяйственной машине.
Применение горизонтального шарнира 15 между поворотной площадкой 10 и сцепным устройством 11 обеспечивает возможность изменения угла наклона беспилотного тягово-энергетического модуля сельскохозяйственного назначения относительно рамы сельскохозяйственной машины 25 в вертикальной плоскости перпендикулярной его продольной оси в диапазоне ±20о, что позволяет компенсировать неровности микрорельефа поля при работе агрегата.
При формировании агрегата с сельскохозяйственной машиной, требующей передачи механической энергии для привода активных рабочих органов беспилотный тягово-энергетический модуль сельскохозяйственного назначения оснащается как минимум одним выносным гидро- или электродвигателем с гибкими линиями передачи рабочей жидкости или электрической энергии. При этом агрегат формируется таким образом, что часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения реализует имеющийся запас энергии преимущественно для привода активных рабочих органов сельскохозяйственной машины, а другая часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения создает только необходимое тяговое усилие.
При переводе широкозахватного агрегата в транспортное положение беспилотные тягово-энергетические модули сельскохозяйственного назначения поворачиваются таким образом, что их продольная ось располагается перпендикулярно продольной оси сельскохозяйственной машины, за счет чего обеспечиваются значительно меньшие габаритные размеры агрегата в транспортном положении.
Использование одинаковых беспилотных тягово-энергетических модулей сельскохозяйственного назначения позволяет формировать комбинации из одних и те же беспилотных тягово-энергетических модулей сельскохозяйственного назначения для выполнения технологических операций с сельскохозяйственными машинами различной ширины захвата и, соответственно, требующих различных тяговых усилий, что позволяет максимально эффективно использовать тяговый и энергетический потенциал беспилотных тягово-энергетических модулей сельскохозяйственного назначения с учетом агроклиматических условий, контура и размера полей. Тем самым применение беспилотных тягово-энергетических модулей сельскохозяйственного назначения позволяет сократить номенклатуру и разномарочность парка сельскохозяйственных мобильных энергетических средств, обеспечить наивысший уровень унификации и взаимозаменяемости применяемых в сельском хозяйстве тягово-энергетических средств и уровень их годовой загрузки, снизить простои агрегатов из-за выхода из строя отдельных беспилотных тягово-энергетических модулей сельскохозяйственного назначения за счет их быстрой замены на исправные.
Использование изобретения позволит упростить конструкцию тягово-энергетических средств сельскохозяйственного назначения и сельскохозяйственных машин, снизить их металлоемкость, повысить производительность сельскохозяйственных агрегатов, снизить энергозатраты и себестоимость выполнение технологических операций, повысить уровень унификации тягово-энергетических средств сельскохозяйственного назначения и сельскохозяйственных машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТРАКТОР | 2013 |
|
RU2545216C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ УБОРОЧНЫЙ АГРЕГАТ | 1991 |
|
RU2028035C1 |
| СПОСОБ АГРЕГАТИРОВАНИЯ НАБОРА СМЕНЯЕМЫХ МОДУЛЕЙ-АДАПТЕРОВ И БЛОКОВ ИЗ НИХ С ЭНЕРГОСРЕДСТВОМ ДЛЯ ВЫПОЛНЕНИЯ МЕХАНИЗИРОВАННЫХ РАБОТ ПРИ ПРОИЗВОДСТВЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2431954C2 |
| Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур | 2019 |
|
RU2701663C1 |
| ЭНЕРГОСРЕДСТВО ДЛЯ АГРЕГАТИРОВАНИЯ С НАБОРОМ СМЕНЯЕМЫХ МОДУЛЕЙ-АДАПТЕРОВ ПРИ ПРОИЗВОДСТВЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 2013 |
|
RU2574479C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ (ВАРИАНТЫ) | 2008 |
|
RU2387119C1 |
| Транспортное средство сельскохозяйственного назначения | 1978 |
|
SU715042A1 |
| Транспортное устройство сельскохозяйственного назначения | 1987 |
|
SU1463149A1 |
| Гидроцепное догружающе-регулирующее устройство сельскохозяйственного агрегата | 2018 |
|
RU2729095C2 |
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
Группа изобретений относится к сельскому хозяйству. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения, агрегатируемый с сельскохозяйственными машинами, содержит несущую платформу (1), движитель (3) с приводом (4), узел изменения направления движения платформы, энергетический узел (2), топливный узел и коммуникации между ними, узел управления, узел информационной связи между модулями, датчики количества энергии и топлива, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, датчик определения положения платформы относительно плантации, контрольно-управляющее устройство и устройство мониторинга состояния плантации, каждый из которых включает в себя узел управления и узел связи, устройство мониторинга состояния плантации с датчиком состояния плантации. Узел изменения направления движения снабжен размещенной над несущей платформой (1) поворотной платформой (5), установленной с возможностью поворота в горизонтальной плоскости на 360° относительно центра несущей платформы (1). Стыковочно-обменный узел снабжен сцепным устройством (11), соединенным с поворотной платформой (5) при помощи как минимум двух гидро- или электроцилиндров (8 и 13) с возможностью изменения его положения относительно поворотной платформы (5) в вертикальной плоскости. Способ агрегатирования по меньшей мере одного беспилотного тягово-энергетического модуля сельскохозяйственного назначения с сельскохозяйственными машинами, в котором к раме (25) сельскохозяйственной машины сцепными устройствами (11) присоединяют как минимум два беспилотных тягово-энергетических модуля сельскохозяйственного назначения. Обеспечивается упрощение конструкции и снижение металлоемкости сельскохозяйственных агрегатов, повышение их производительности, снижение энергозатрат на выполнение технологических операций, снижение себестоимости выполнения работ, снижение удельного давления на почву, в частности, при выполнении пропашных работ, повышение уровня унификации тягово-энергетических средств сельскохозяйственного назначения и агрегатируемых с ними сельскохозяйственных машин. 2 н. и 7 з.п. ф-лы, 11 ил.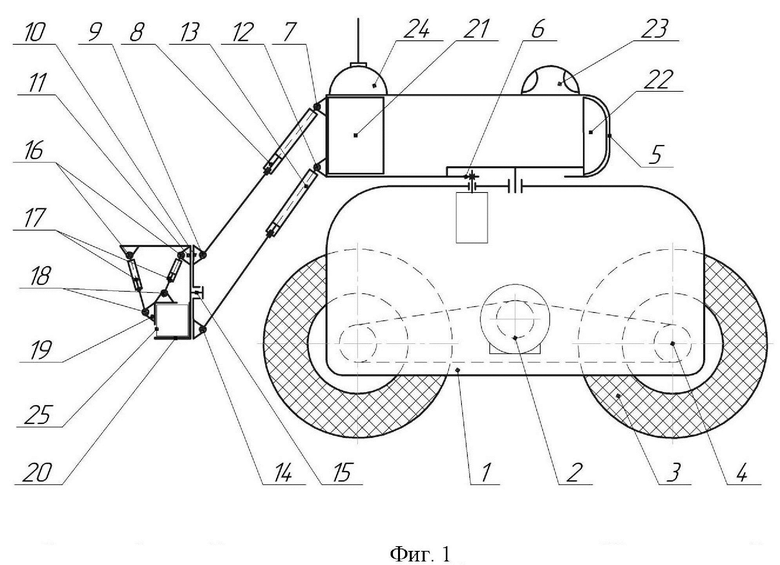
1. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения, агрегатируемый с сельскохозяйственными машинами, включающий несущую платформу, движитель с приводом, узел изменения направления движения платформы, энергетический узел, топливный узел и коммуникации между ними, узел управления, узел информационной связи между модулями, датчики количества энергии и топлива, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, датчик определения положения платформы относительно плантации, контрольно-управляющее устройство и устройство мониторинга состояния плантации, каждый из которых включает в себя узел управления и узел связи, устройство мониторинга состояния плантации с датчиком состояния плантации, отличающийся тем, что узел изменения направления движения снабжен размещенной над несущей платформой поворотной платформой, установленной с возможностью поворота в горизонтальной плоскости на 360° относительно центра несущей платформы, стыковочно-обменный узел снабжен сцепным устройством, соединенным с поворотной платформой при помощи как минимум двух гидро- или электроцилиндров с возможностью изменения его положения относительно поворотной платформы в вертикальной плоскости.
2. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения по п. 1, отличающийся тем, что сцепное устройство снабжено подвижным и неподвижным захватами в форме угловой балки, обеспечивающими жесткую фиксацию прямоугольной рамы сельскохозяйственной машины между ними, при этом неподвижный захват жестко закреплен на сцепном устройстве, а подвижный захват шарнирно присоединен к сцепному устройству с помощью как минимум двух гидро- или электроцилиндров.
3. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения по п. 2, отличающийся тем, что сцепное устройство снабжено горизонтальным шарниром, установленным с возможностью поворота на ±20° относительно тягово-энергетического модуля в перпендикулярной продольной оси тягово-энергетического модуля плоскости.
4. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения по п. 1, отличающийся тем, что снабжен как минимум одним выносным гидро- или электродвигателем с гибкими линиями передачи рабочей жидкости или электрической энергии.
5. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения по п. 1, отличающийся тем, что движитель выполнен двухколесным с электроприводом, а колеса расположены последовательно.
6. Беспилотный тягово-энергетический модуль сельскохозяйственного назначения по п. 1, отличающийся тем, что движитель выполнен гусеничным с резиноармированными гусеницами с электроприводом.
7. Способ агрегатирования по меньшей мере одного беспилотного тягово-энергетического модуля сельскохозяйственного назначения по п. 1 с сельскохозяйственными машинами, характеризующийся тем, что к раме сельскохозяйственной машины сцепными устройствами присоединяют как минимум два беспилотных тягово-энергетических модуля сельскохозяйственного назначения.
8. Способ агрегатирования по п. 7, отличающийся тем, что при присоединении беспилотных тягово-энергетических модулей сельскохозяйственного назначения проводят синхронизацию параметров их работы, согласуют скорости и траектории движения, плавность хода, подъем и опускание машины, а обмен данными между беспилотными тягово-энергетическими модулями сельскохозяйственного назначения осуществляют через узел информационной связи по беспроводной сети.
9. Способ агрегатирования по п. 7, отличающийся тем, что часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения используют для привода активных рабочих органов сельскохозяйственной машины, а другая часть беспилотных тягово-энергетических модулей сельскохозяйственного назначения создает необходимое тяговое усилие.
| US 10609854 B2, 07.04.2020 | |||
| US 2022007561 A1, 13.01.2022 | |||
| Пропашной самоходный агрегат | 1979 |
|
SU858598A1 |
| US 10080321 B2, 25.09.2018 | |||
| US 6671582 B1, 30.12.2003 | |||
| US 4819738 A, 11.04.1989 | |||
| Мостовой агрегат по уходу за виноградным кустом, размещенным на склонах крутизной 15-25 | 2018 |
|
RU2685910C1 |
| Устройство для параллельного соединения тракторов | 1986 |
|
SU1393656A1 |
| Сельскохозяйственный агрегат | 1977 |
|
SU671764A1 |

