Изобретение относится к системам управления судами и, в частности, к системам управления режимами работы главного двигателя судна.
Известные системы автоматического управления движением судна (см., например, патент RU 2463205 C2, 2012 г.; (RU 2292289 C1, 27.01.2007)), которая состоят из приёмника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения курсового угла и сумматора, в котором по сигналам текущего значения курсового угла, заданного значения курсового угла и угловой скорости судна формируется сигнал управления рулевым приводом судна.
Однако, указанные аналоги имеют недостатки, заключающиеся в том, что они обеспечивают автоматическое управление только при движении судна по курсу. При движении на мелководье скорость судна при неизменной мощности главного двигателя уменьшается, диаметр циркуляции и тормозной путь увеличиваются, возрастает осадка от проседания судна, что может привести к касанию дна килем судна и, как следствие, к аварии. Поэтому плавание на мелководье должно осуществляться с повышенной осторожностью и требует высокой квалификации персонала. Влияние мелководья зависит от скорости судна и начинает проявляться с достижением глубины ( ) значений, определяемых по формуле Г.Е. Павленко:
) значений, определяемых по формуле Г.Е. Павленко:  ,
,
где T - средняя осадка неподвижного судна, м;
V - скорость судна, м/с;
 - ускорение свободного падения, 9,81м/с2.
- ускорение свободного падения, 9,81м/с2.
Наиболее близким по технической сущности к заявленному устройству является «Устройство аварийного торможения судна с помощью руля и циркуляции», патент RU 2752101 от 22.07.2021. Указанное устройство аварийного торможения судна с помощью руля и циркуляции состоит из блока управления курсом (БУК), блока навигации (БН), блока управления режимами работы главного двигателя (БУГД), блока аварийного управления рулем (БАУР), блока аварийного управления главным двигателем (БАУГД) и блока изменения курса и скорости (БИКС) судна. Первый, второй, третий, четвертый, пятый и шестой выходы БИКС соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами БАУГД. Первый, второй и третий выходы БИКС также соединены, соответственно, с входами вторым, третьим и вторым БАУР. Первый и четвертый входы БАУР, соединены, соответственно, с выходами девятым БАУГД и двенадцатым БИКС, входы седьмой, восьмой, девятый, десятый и одиннадцатый БИКС соединены, соответственно, с выходами седьмым БАУГД, вторым и первым БН, шестым и пятым БАУР. Выходы: восьмой БАУГД, седьмой, восьмой, девятый БАУР соединены, соответственно, с входами вторым БУГД, первым и вторым БУК и первым БУГД. Тринадцатый выход БИКС соединён с десятым входом БАУГД и третьим входом БУГД. Девятый выход БАУГД также соединён с четырнадцатым входом БИКС. Четвёртый выход БИКС также соединён с одиннадцатым входом БАУГД.
Недостатком ближайшего аналога является отсутствие возможности автоматического снижения скорости судна при движении на мелководье, в условиях его отрицательного влияния, что в процессе эксплуатации может привести к проседанию судна и, как следствие, к задеванию дна.
Техническим результатом от применения заявляемого устройства является автоматическое снижение скорости судна до безопасного значения, исключающего его проседание на мелководье и предотвращающего аварийное разрушение конструкции корпуса.
Для достижения указанного технического результата, предлагаемое устройство, также, как известное устройство аварийного торможения судна содержит блоки аварийного управления рулём БАУР, аварийного управления главным двигателем БАУГД, изменения курса и скорости БИКС, управления курсом БУК, управления главным двигателем БУГД и блок навигации БН. Но, в отличие от известного, в структуру устройства введён блок выработки режима работы главного двигателя на мелководье БРРМ, первый выход которого соединён с четвёртым входом БУГД, а входы второй, третий и четвёртый соединены соответственно со вторым выходом по текущей скорости хода VT, с третьим выходом по текущей осадке судна ТТ и с четвёртым выходом по текущей глубине моря под килем судна HT БН.
Также технический результат достигается за счет того, что блок выработки режима работы главного двигателя на мелководье БРРМ содержит кнопку «Стоп» (КН СТОП), блок выработки сигнала о движении судна на мелководье НМ, элемент сравнения ЭС, первый инвертор «НЕ», второй инвертор «НЕ», логический элемент «ИЛИ», триггер, задающее устройство положения сектора газа главного двигателя при движении на мелководье ЗУСГМ, при этом на первый вход блока НМ БРРМ подаётся сигнал с третьего входа БРРМ, а на второй вход блока НМ подаётся сигнал со второго входа БРРМ, в то время, как выход блока НМ соединён со вторым входом ЗУСГМ и со вторым входом элемента сравнения ЭС, первый вход которого является четвёртым входом БРРМ, при этом выход элемента ЭС соединён через первый инвертор «НЕ» с входом S триггера, а выход первого инвертора «НЕ», кроме того, через второй инвертор «НЕ» соединён через первый вход элемента «ИЛИ» с входом R триггера, а второй вход элемента «ИЛИ» соединён с кнопкой КН СТОП, выход триггера соединён с первым входом ЗУСГМ, а выход ЗУСГМ является выходом БРРМ.
Также технический результат достигается за счет того, что блок управления главным двигателем БУГД состоит из задатчика режимов работы главного двигателя (ЗГД), логического элемента «И», инвертора «НЕ», первого логического элемента «ИЛИ», второго логического элемента «ИЛИ», элемента сравнения (ЭС), усилителя (У), исполнительного механизма (ИМ), сектора газа (СГ) и датчика обратной связи (ДОС), при этом выход ЗГД соединен со вторым входом элемента «И», первый вход этого элемента соединён с выходом инвертора «НЕ», вход которого соединён с выходом элемента «ИЛИ, а первый и третий внешние связи БУГД осуществляются через первый и второй входы элемента «ИЛИ», а внешняя четвёртая связь БУГД осуществляется через третий вход элемента «ИЛИ» и второй вход второго элемента «ИЛИ», а выход элемента «И» соединён с первым входом второго элемента «ИЛИ», выход которого соединён с первым входом элемента сравнения ЭС, в то время как второй вход элемента сравнения ЭС является второй внешней связью БУГД, а третий вход элемента сравнения ЭС соединён с выходом датчика обратной связи ДОС, а выход элемента сравнения ЭС через усилитель У, исполнительный механизм ИМ механически связан с сектором газа главного двигателя - СГ и с датчиком обратной связи ДОС.
Также технический результат достигается за счет того, что в блок навигации БН, имеющий выходные связи для передачи сигналов о курсе судна и о скорости судна, введены выходные связи по передаче сигналов о текущей осадке судна и текущей глубине моря под килем судна.
Заявленное устройство поясняется чертежами:
фиг.1 - устройство аварийного торможения судна с помощью руля, циркуляции и управления скоростью на мелководье (УАТРЦМ);
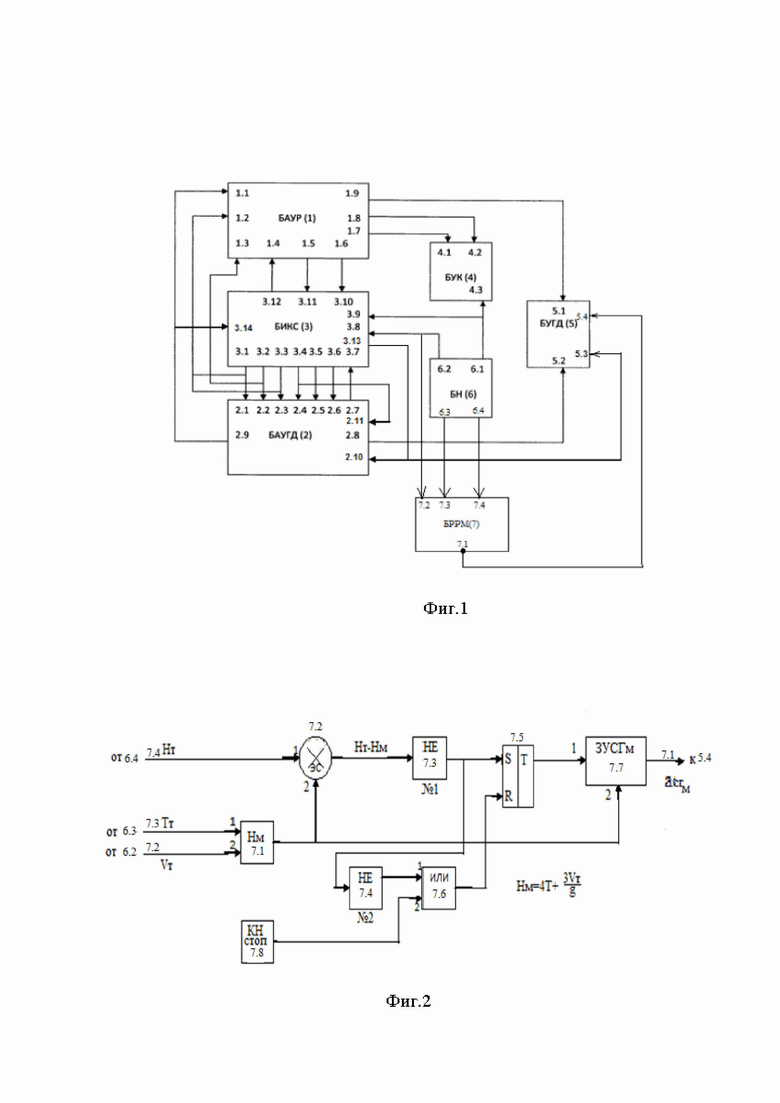
фиг.2 - блок выработки режима работы главного двигателя на мелководье (БРРМ) (7);
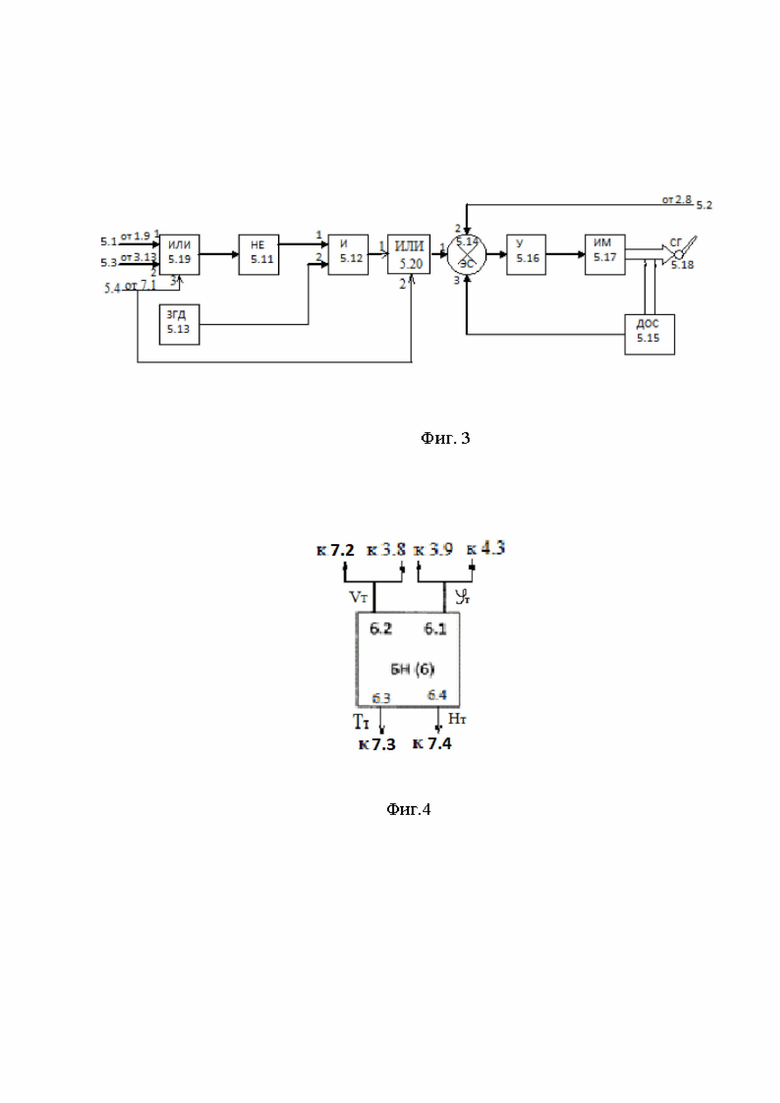
фиг.3 - блок управления главным двигателем (БУГД) (5);
фиг.4 - блок навигации БН (6).
Предлагаемое устройство содержит блоки аварийного управления рулём БАУР 1, аварийного управления главным двигателем БАУГД 2, изменения курса и скорости БИКС 3, управления курсом БУК 4, управления главным двигателем БУГД 5, блок навигации БН 6, блок выработки режима работы главного двигателя на мелководье БРРМ 7, первый выход которого соединён с четвёртым входом БУГД 5, а входы второй, третий и четвёртый соединены соответственно со вторым выходом по текущей скорости хода VT, с третьим выходом по текущей осадке судна ТТ и с четвёртым выходом по текущей глубине моря под килем судна HT БН.
БРРМ 7, фиг.2, предназначен для выработки управляющего сигнала на перекладку сектора газа главного двигателя в режим работы на мелководье и содержит кнопку «Стоп» КН СТОП, блока выработки сигнала о движении судна на мелководье НМ 7.1, элемента сравнения ЭС 7.2, первого инвертора «НЕ» 7.3, второго инвертора «НЕ» 7.4, логического элемента «ИЛИ» 7.6, триггера 7.5, задающего устройства положения сектора газа главного двигателя при движении на мелководье ЗУСГМ 7.7.
Первый вход блока НМ 7.1 БРРМ 7 фиг. 2, является третьим входом 7.3 БРРМ 7, а второй вход блока НМ7.1 является вторым входом 7.2 БРРМ 7. Выход блока НМ7.1 соединён со вторым входом ЗУСГМ7.7 и со вторым входом элемента сравнения ЭС .2). Первый вход элемента сравнения ЭС 7.2 является четвёртым входом 7.4 БРРМ 7.
Выход элемента сравнения ЭС 7.2 соединён через первый инвертор «НЕ» 7.3 с входом S триггера 7.5. Выход первого инвертора «НЕ» 7.3 также, через второй инвертор «НЕ» 7.4, соединён с первым входом элемента «ИЛИ» 7.6, второй вход которого соединён с кнопкой КН СТОП 7.8.
Выход элемента «ИЛИ» 7.6 соединён с входом R триггера 7.5, выход которого соединён с первым входом ЗУСГМ7.7, а выход ЗУСГМ 7.7 является выходом 7.1 БРРМ 7.
БУГД 5фиг. 3, предназначен для изменения режимов работы главного двигателя по сигналам управления БРРМ 7 и состоит из задатчика режимов работы главного двигателя ЗГД 5.13, логического элемента «И» 5.12, инвертора «НЕ» 5.11, логического элемента «ИЛИ» 5.19, логического элемента «ИЛИ» 5.20 элемента сравнения ЭС 5.14, усилителя У 5.16, исполнительного механизма ИМ 5.17, сектора газа СГ 5.18 и датчика обратной связи ДОС 5.15.
Выход ЗГД 5.13 соединен со вторым входом элемента «И» 5.12, первый вход которого соединён с выходом инвертора «НЕ» 5.11, на вход которого подаётся сигнал с выхода логического элемента «ИЛИ» 5.19.Первый и второй входы логического элемента «ИЛИ» 5.19 являются входами 5.1 и 5.3 БУГД 5,а третий вход логического элемента «ИЛИ» 5.19, соединён с входом 5.4 БУГД 5. Выход элемента «И» 5.12 соединён с первым входом элемента «ИЛИ» 5.20, второй вход которого соединён с входом 5.4 БУГД 5.
Выход элемента «ИЛИ» 5.20 соединён с первым входом элемента сравнения ЭС 5.14, второй вход которого является входом 5.2 БУГД 5.Третий вход элемента сравнения5.14соединён с выходом ДОС 5.15, а выход элемента сравнения ЭС 5.14 через усилитель У 5.16,исполнительный механизм ИМ 5.17 механически связан с сектором газа СГ 5.18 и с датчиком обратной связи ДОС 5.15.
БН 6фиг. 4, предназначен для выработки сигнала по скорости VT6.2, сигнала по текущей осадке судна ТТ 6.3 и текущей глубине моря под килем НТ6.4.
Устройство аварийного торможения судна с помощью руля, циркуляции и управления скоростью на мелководье (УАТРЦМ), фиг.1, работает следующим образом. В исходном состоянии, когда судно движется прямым курсом, работает блок управления курсом БУК 4, получая информацию по курсу судна ϕτ на вход 4.3 БУК 4 от выхода 6.1 блока навигации БН 6, и обеспечивая стабилизацию курса судна. Сигналы на входах 5.1 и 5.3 блока управления главным двигателем БУГД 5 равны нулю. В этом случае в БУГД 5, фиг.3, на выходе инвертора «НЕ» 5.11 наличествует сигнал, открывающий элемент «И» 5.12 БУГД 5. Сигнал от задатчика ЗГД 5.13, через второй вход элемента «И» 5.12и через первый вход элемента «ИЛИ» 5.20 поступает на первый вход элемента сравнения ЭС 5.14, обеспечивая поддержание заданного режима работы главного двигателя следящей системой, состоящей из элемента сравнения ЭС 5.14, усилителя У 5.16, исполнительного механизма ИМ 5.17, сектора газа главного двигателя СГ 5.18 и датчика обратной связи ДОС 5.15.
Сигналы по текущей глубине моря под килем судна - НТ, текущей осадке - ТТ и текущей скорости судна - VT поступают от выходов 6.4, 6.3 и 6.2блока навигации БН 3, фиг.1, соответственно на входы 7.4,7.3, 7.2 блока выработки режима работы главного двигателя на мелководье БРРМ 7.
С четвёртого входа 7.4 БРРМ 7, фиг.2, сигнал по глубине моря под килем - НТ поступает на первый вход элемента сравнения ЭС 7.2.
Сигналы по текущей осадке ТТ и по текущей скорости судна VT с входов 7.3и 7.2 поступают в блок выработки сигнала о движении судна на мелководье НМ 7.1, где определяется текущая глубина мелководья по формуле Г.Е. Павленко: ; далее выработанный сигнал поступает на второй вход элемента ЭС 7.2.
Если текущая глубина моря - НТ больше рассчитанной в блоке НМ 7.1, фиг.2, глубины моря для мелководья, то благодаря первому и второму инверторам «НЕ» 7.3 и 7.4 триггер 7.5 закрыт и на выходе задающего устройства положения сектора газа главного двигателя при движении на мелководье ЗУСГМ 7.7 нет сигнала управления.
В том случае, когда НТ - НМ<0 или = 0 на выходе первого инвертора «НЕ» 7.3, фиг.2, появляется сигнал, который включает триггер 7.5, и проходя через второй инвертор «НЕ» 7.4 на первый вход элемента «ИЛИ» 7.6 он блокирует возможность отключения триггера 7.5.
Сигнал с выхода триггера (7.5) поступает на первый вход блока ЗУСГМ 7.7 и включает его, а благодаря сигналу о глубине моря на мелководье, поступающему на второй вход блока ЗУСГМ7.7 на его выходе вырабатывается сигнал управления по переводу в соответствующее положение сектора газа насоса-регулятора главного двигателя, обеспечивающего требуемую скорость судна на мелководье.
Сигнал управления с выхода ЗУСГМ 7.7 поступает на выход 7.1 БРРМ 7, который соединён с входом 5.4блока управления главным двигателем БУГД 5, фиг.3.
Сигнал управления с входа 5.4 БУГД 5, фиг.3, через третий вход элемента «ИЛИ» 5.19 подаётся на инвертор «НЕ» 5.11,который закрывает элемент «И» 5.12, прекращая тем самым поступление сигнала управления от задатчика режима работы главного двигателя ЗГД 5.13.
Этот же сигнал управления с входа 5.4 БУГД 5 через второй вход элемента «ИЛИ» 5.20 поступает на первый вход элемента сравнения ЭС 5.14, обеспечивая тем самым перекладку сектора газа главного двигателя СГ 5.18 в положение, соответствующее режиму работы главного двигателя, обеспечивающего безопасную скорость на мелководье.
Когда судно переходит на глубокую воду, сигнал управления НТ - НМ в блоке выработки режима работы главного двигателя на мелководье БРРМ 7, фиг.2, после элемента сравнения ЭС 7.2, будет больше нуля, тогда на выходе первого инвертора «НЕ» 7.3 сигнал управления будет равен нулю. Этот же сигнал после второго инвертора «НЕ» 7.4 через первый вход элемента ИЛИ 7.6 закрывает триггер 7.5, сбрасывая тем самым сигнал управления с задающего устройства положения сектора газа главного двигателя при движении на мелководье ЗУСГМ 7.7. В результате на выходе 7.1 БРРМ 7, фиг.2, сигнал управления отсутствует, что приводит к отсутствию сигнала управления на входе 5.4блока управления главным двигателем БУГД 5, фиг.3, а также на втором входе элемента «ИЛИ» 5.20 БУГД5.На выходе инвертора «НЕ» 5.11 БУГД 5 появляется сигнал, который открывает элемент «И» 5.12, подключая тем самым блок задатчика режима работы главного двигателя ЗГД 5.13 через первый вход элемента «ИЛИ» 5.20 к первому входу элемента сравнения ЭС 5.14 и перекладывает сектор газа главного двигателя СГ 5.18 на прежний режим работы, который был до вхождения судна в район мелководья.
Схему также можно вернуть в исходное состояние с помощью кнопки КН СТОП 7.8 блока выработки режима работы главного двигателя на мелководье БРРМ 7 фиг.2. Сигнал с её выхода поступает через второй вход элемента «ИЛИ» 7.6 на вход R триггера 7.5, который отключает его, приводя тем самым, схему в исходное состояние.
Подтверждение возможности достижения указанных технических результатов при использовании заявленного устройства было осуществлено в результате испытаний лабораторного макета, выполненного на логических элементах электронной техники, совместно с моделью источников информации и моделью продольного движении судна, реализованными на персональном компьютере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления судном в штормовых условиях | 2023 |
|
RU2808705C1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ | 2018 |
|
RU2707480C1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ И ЦИРКУЛЯЦИИ | 2020 |
|
RU2752101C1 |
| Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф | 2017 |
|
RU2658232C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЧЕСКОЙ УСТАНОВКОЙ СУДНА | 2014 |
|
RU2566506C1 |
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| Способ предупреждения происшествий от дефектной дуги в электрической сети или электроустановке переменного тока и устройство для его осуществления | 2022 |
|
RU2799971C1 |
| Устройство для управления судовым оборудованием | 1983 |
|
SU1117255A1 |
| РЕГУЛЯТОР РЕЖИМА РАБОТЫ СУДОВОГО ДИЗЕЛЯ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2044909C1 |
Изобретение относится к области судостроения и может быть использовано в системе управления судна. Устройство содержит блоки аварийного управления рулём (БАУР), аварийного управления главным двигателем (БАУГД), изменения курса и скорости (БИКС), управления курсом (БУК), управления главным двигателем (БУГД) и блок навигации (БН). В структуру устройства введён блок выработки режима работы главного двигателя на мелководье (БРРМ), первый выход которого соединён с четвёртым входом БУГД, а входы второй, третий и четвёртый соединены соответственно со вторым выходом по текущей скорости хода VТ, с третьим выходом по текущей осадке судна ТТ и с четвёртым выходом по текущей глубине моря под килем судна HТ БН. Достигается автоматическое снижение скорости судна до безопасного значения, исключающего его проседание на мелководье и предотвращающего аварийное разрушение конструкции корпуса. 3 з.п. ф-лы, 4 ил.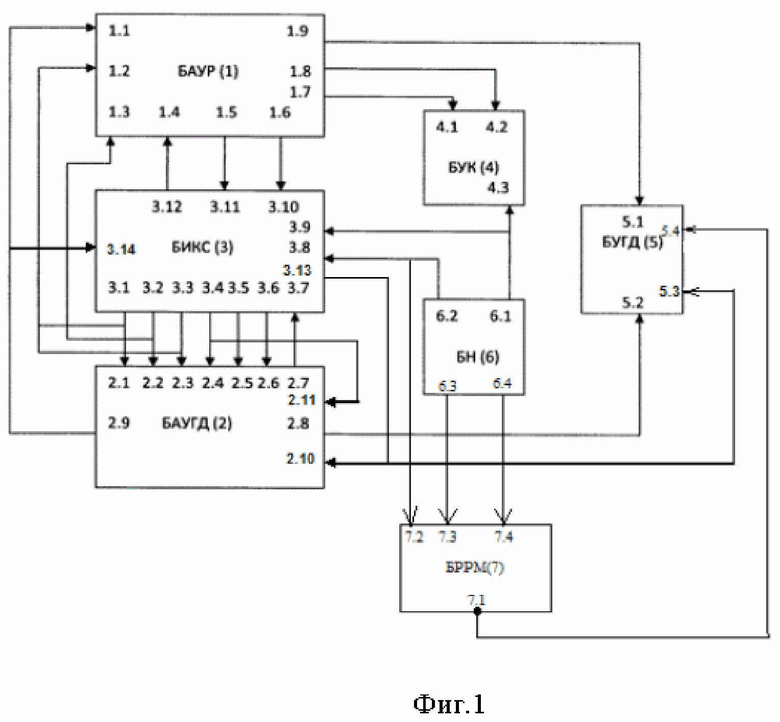
1. Устройство аварийного торможения судна (УАТС), содержащее блоки аварийного управления рулём (БАУР), аварийного управления главным двигателем (БАУГД), изменения курса и скорости (БИКС), управления курсом (БУК), управления главным двигателем (БУГД) и блок навигации (БН), отличающееся тем, что в структуру устройства введён блок выработки режима работы главного двигателя на мелководье (БРРМ), первый выход которого соединён с четвёртым входом БУГД, а входы второй, третий и четвёртый соединены соответственно со вторым выходом по текущей скорости хода VТ, с третьим выходом по текущей осадке судна ТТ и с четвёртым выходом по текущей глубине моря под килем судна HТ БН.
2. Устройство аварийного торможения судна по п.1, отличающееся тем, что блок выработки режима работы главного двигателя на мелководье (БРРМ) содержит кнопку «Стоп» (КН СТОП), блок выработки сигнала о движении судна на мелководье НМ, элемент сравнения (ЭС), первый инвертор «НЕ», второй инвертор «НЕ», логический элемент «ИЛИ», триггер, задающее устройство положения сектора газа главного двигателя при движении на мелководье ЗУСГМ, при этом на первый вход блока НМ БРРМ подаётся сигнал с третьего входа БРРМ, а на второй вход блока НМ подаётся сигнал со второго входа БРРМ, в то время как выход блока НМ соединён со вторым входом ЗУСГМ и со вторым входом элемента сравнения ЭС, первый вход которого является четвёртым входом БРРМ, при этом выход элемента ЭС соединён через первый инвертор «НЕ» с входом S триггера, а выход первого инвертора «НЕ», кроме того, через второй инвертор «НЕ» соединён через первый вход элемента «ИЛИ» с входом R триггера, а второй вход элемента «ИЛИ» соединён с кнопкой КН СТОП, выход триггера соединён с первым входом ЗУСГМ, а выход ЗУСГМ является выходом БРРМ.
3. Устройство аварийного торможения судна по п.1, отличающееся тем, что блок управления главным двигателем (БУГД) состоит из задатчика режимов работы главного двигателя (ЗГД), логического элемента «И», инвертора «НЕ», первого логического элемента «ИЛИ», второго логического элемента «ИЛИ», элемента сравнения (ЭС), усилителя (У), исполнительного механизма (ИМ), сектора газа (СГ) и датчика обратной связи (ДОС), при этом выход ЗГД соединен со вторым входом элемента «И», первый вход этого элемента соединён с выходом инвертора «НЕ», вход которого соединён с выходом элемента «ИЛИ», а первый и третий внешние связи БУГД осуществляются через первый и второй входы элемента «ИЛИ», а внешняя четвёртая связь БУГД осуществляется через третий вход элемента «ИЛИ» и второй вход второго элемента «ИЛИ», а выход элемента «И» соединён с первым входом второго элемента «ИЛИ», выход которого соединён с первым входом элемента сравнения ЭС, в то время как второй вход элемента сравнения ЭС является второй внешней связью БУГД, а третий вход элемента сравнения ЭС соединён с выходом датчика обратной связи ДОС, а выход элемента сравнения ЭС через усилитель У, исполнительный механизм ИМ механически связан с сектором газа главного двигателя СГ и с датчиком обратной связи ДОС.
4. Устройство аварийного торможения судна по п.1, отличающееся тем, что в блок навигации (БН), имеющий выходные связи для передачи сигналов о курсе судна и о скорости судна, введены выходные связи по передаче сигналов о текущей осадке судна и текущей глубине моря под килем судна.
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ И ЦИРКУЛЯЦИИ | 2020 |
|
RU2752101C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| JP 2012210875 A, 01.11.2012 | |||
| US 20160264143 A1, 15.09.2016 | |||
| US 20200073392 A1, 05.03.2020. | |||

