Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению с использованием приемника спутниковой навигационной системы.
Известен "Способ экспериментального определения параметров математической модели движения судна" (патент России № 2151713). В рассматриваемом способе, благодаря использованию информации о состоянии судна от приемника спутниковой навигационной системы, удается идентифицировать все коэффициенты полной математической модели движения судна, чтобы обеспечить автоматическое управление судна по заданному направлению.
Известен также способ автоматического управления движением судна по заданному путевому углу, реализованный в "Системе автоматического управления движением судна", принятой в качестве прототипа (патент России № 2245914, Б.И. № 9, март 2005 г.). Способ управления движением судна основан на использовании информация от приемника спутниковой навигационной системы, заданного значения путевого угла, устанавливаемого судоводителем, и регулятора-сумматора, в котором по сигналам текущего путевого угла, заданного путевого угла, угловой скорости судна формируется результирующий сигнал для управления рулевыми приводами судна.
Недостатками рассмотренных способов управления движением являются:
- некомпенсируемое автоматически боковое смещение судна с заданного маршрута, появляющееся при воздействии внешних возмущений,
- невозможность обеспечения автоматического движения судна по заданному маршруту из порта "А" в порт "Б".
Известные способы автоматического управления движением судна являются в действительности полуавтоматическими, т.к. требуют непрерывного участия судоводителя в управлении для введения градусных поправок при отклонении судна от внешних воздействий и задания нового направления движения судну при подходе к очередной точке излома заданной траектории движения.
В предлагаемом способе, благодаря использованию информации о местонахождении судна от приемника спутниковой навигационной системы и точек поворота судна от задатчика траектории заданного маршрута, удается полностью автоматизировать процесс управления движением судна из точки "А" в точки "Б", "В"..."Я" заданного маршрута движения.
Целью предлагаемого способа управления движением судна является:
- обеспечение автоматического корректирования сигнала заданного значения путевого угла через повторяющийся фиксированный интервал времени "Δt" для достижения высокой точности движения судна по заданному маршруту,
- создание полностью автоматического управления движением судна.
Рассмотрим как устраняются отмеченные выше два недостатка в предложенном способе.
Способ автоматического управления движением судна основан на использовании сигналов точек поворота маршрута из блока траектории заданного маршрута и сигналов текущей широты и долготы судна от приемника спутниковой навигационной системы, рулевого привода и регулятора-сумматора, на вход которого подают: сигнал угловой скорости судна, сигнал угла перекладки руля, сигнал текущего путевого угла. Дополнительно к указанным сигналам вводят сигнал заданного путевого угла, который вырабатывают, используя сигналы широты и долготы судна в начальный момент времени плавания "Т0" и сигналы значений широты и долготы точки первого поворота судна, соответствующей моменту времени "T1". Сигнал заданного значения путевого угла подают на вход регулятора-сумматора, сформированный на выгоде регулятора-сумматора управляющий сигнал поступает на вход рулевого привода, что выводит судно на заданную траекторию движения. Через интервал времени "Δt" в момент времени "Т0+Δt" формируют модуль первой разности между сигналом текущей широты судна и сигналом широты первой точки поворота судна, соответствующей моменту времени "T1", и модуль второй разности между сигналом текущей долготы судна и сигналом долготы первой точки поворота судна, соответствующей моменту времени "T1", при выполнении условий: модуль первой разности больше величины "С" или модуль второй разности больше величины "С", формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в момент времени "Т0+Δt" и заданным значениям широты и долготы первой точки поворота судна, соответствующей моменту времени "T1". Сигнал заданного значения путевого угла вводят на вход регулятора-сумматора, сформированный управляющий сигнал с выхода регулятора-сумматора подают на вход рулевого привода Рулевой привод корректирует движение судна, устраняя отклонение с заданной траектории. Процесс выработки уточненного значения заданного путевого угла многократно повторяется через интервалы времени "Δt". Через "m" интервалов времени, т.е. в момент времени "Т0+mΔt", когда сформированный модуль первой разности между сигналом текущей широты судна и сигналом широты точки первого поворота судна и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки первого поворота судна в будущий момент времени "T1" меньше величины "С", формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в моменты времени "Т0+mΔt" и заданным значениям широты и долготы второй точки поворота судна, соответствующей моменту времени "Т2". Сигнал нового заданного путевого угла вводят на вход регулятора-сумматора, затем сформированный управляющий сигнал с выхода регулятора-сумматора подают на вход рулевого привода. Судно выходит на новую заданную траекторию движения. В следующие интервалы времени "Δt" от "Т0+(m+1)Δt" до "Т0+(m+n-1)Δt" заданное значение путевого угла формируют по текущей широте и долготе судна и широте и долготе второй точки поворота судна, соответствующей моменту времени "Т2", аналогично вышерассмотренному. В момент времени "T0+(m+n)Δt", когда модуль первой разности и модуль второй разности будет меньше величины "C", формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в момент времени "Т0+(m+n)Δt" и широте и долготе третьей точки поворота судна, соответствующей будущему моменту времени "Т3". Формирование заданного значения путевого угла при движении по маршруту между следующими точками изменения направления движения, т.е. в интервалах времени "Т3",... "Тпослед.", производят аналогично описанному выше.
Для иллюстрации работы предложенного способа на чертеже приведена блок-схема устройства автоматического управления движением судна по заданному маршруту, содержащего: регулятор-сумматор 1, рулевой привод 2, блок выработки угловой скорости 3, датчик руля 4, приемник спутниковой навигационной системы 5, задатчик точек поворота судна 6, блок траектории задания маршрута 7, судно 8.
Устройство автоматически обеспечивает движение судна по заданному маршруту. На вход регулятора-сумматора 1 поступают сигналы: угловой скорости судна "ω" с блока выработки угловой скорости 3, угла перекладки руля "δ" с датчика руля 4, текущего путевого угла "ПУ" с приемника спутниковой навигационной системы 5 и заданного путевого угла ПУзд. с блока траектории заданного маршрута 7. На выходе регулятора-сумматора 1 формируется заданное значение угла перекладки руля "δзд..".:

В соответствие с зависимостью (1) руль будет автоматически перекладываться и обеспечивать удержание судна на заданной траектории движения ПУ=ПУзд. В блоке траектории задания маршрута 7 осуществляется циклически через интервал времени "Δt" вычисление заданного значения путевого угла ПУзд.. Уточненное (или новое) значение ПУзд. поступает на вход регулятора-сумматора 1 и далее на отклонение рулевого привода 2, обеспечивая выход судна на заданный маршрут (траекторию). Сигналы циклов перестройки через интервал времени "Δt" вырабатываются в блоке 7, начиная с момента времени начала рейса "Т0" и кончая временем прихода судна в заданную - последнюю точку маршрута. В задатчике точек поворота судна 6 введены значения широт и долгот всех точек поворота траектории судна, соответствующие моментам времени "Т0"......"Тпослед.".
ϕi, λi
где i - первая, вторая ... последняя точки поворота судна, на заданной траектории маршрута в моменты времени Т1, Т2,... Тпослед.. Из приемника спутниковой навигационной системы 5 текущая широта и долгота местонахождения судна (ϕ, λ) поступает в блок 7, в который также поступает широта и долгота (ϕi, λi) i-й точки поворота судна. В блоке 7 через каждый интервал времени "Δt" выполняются операции сравнения:


При выполнении условия (2) заданный путевой угол вычисляется в блоке 7 по текущей широте и долготе местонахождения судна и по широте и долготе i-й точки поворота судна заданного маршрута. При выполнении условия (3) заданный путевой угол вычисляется в блоке логики 7 по текущей широте и долготе местонахождения судна и по широте и долготе (i+1)-й точки поворота судна по заданному маршруту. Так например, при начале движения судна в момент времени Т0 заданный путевой угол вычисляется по текущей широте и долготе местонахождения судна (ϕ, λ) в момент времени Т0 и широте и долготе первой точки поворота судна - точке заданной траектории, соответствующей моменту времени "T1" (ϕ1, λ1), при (Т0+Δt) выполняется зависимость (2). При Т0+mΔt - момент времени прихода судна в граничную область первой точки поворота заданной траектории выполняется зависимость (3), а следовательно, заданный путевой угол определяется по текущей широте и долготе местонахождения судна в момент времени (T0+mΔt) и по широте и долготе второй точки поворота заданной траектории, соответствующей моменту времени "Т2". Заданный путевой угол из блока 7 поступает на вход регулятора-сумматора 1, что приводит к отклонению руля и переходу судна на новое направление движения. (От точки 1-го поворота траектории до граничной области 2-йточки поворота траектории в процессе этого движения судна будет выполняться зависимость (2)).
Проведенное блочное моделирование рассмотренного выше устройства подтвердило его работоспособность, а следовательно, и эффективность работы предложенного способа управления движением судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
Изобретение относится к области судовождения. В способе используют сигналы текущего путевого угла от приемника спутниковой навигации и заданного значения путевого угла от блока траектории заданного маршрута, с помощью которых совместно с сигналами угловой скорости судна и угла перекладки руля формируют суммарный управляющий сигнал рулевым приводом судна. В процессе выполнения рейса через фиксированные интервалы времени формируют первый модуль разности текущей широты судна и широты "i" точки поворота судна по заданной траектории движения и второй модуль разности текущей долготы судна и долготы "i" точки поворота судна по заданной траектории движения. При удовлетворении условия, когда оба модуля меньше величины "С", заданное значение путевого угла перенаправляют на "i+1" точку движения судна в соответствии с заданной траекторией. Если любой из модулей больше величины "С", то заданное значение путевого угла незначительно корректируют, т.е. сохраняют направление движения к "i" точке поворота судна заданной траектории. Это позволяет вернуть судно к заданной траектории движения. Благодаря автоматическому корректированию сигнала заданного значения путевого угла через повторяющийся фиксированный интервал времени обеспечивается высокая точность движения судна по заданному маршруту. 1 ил.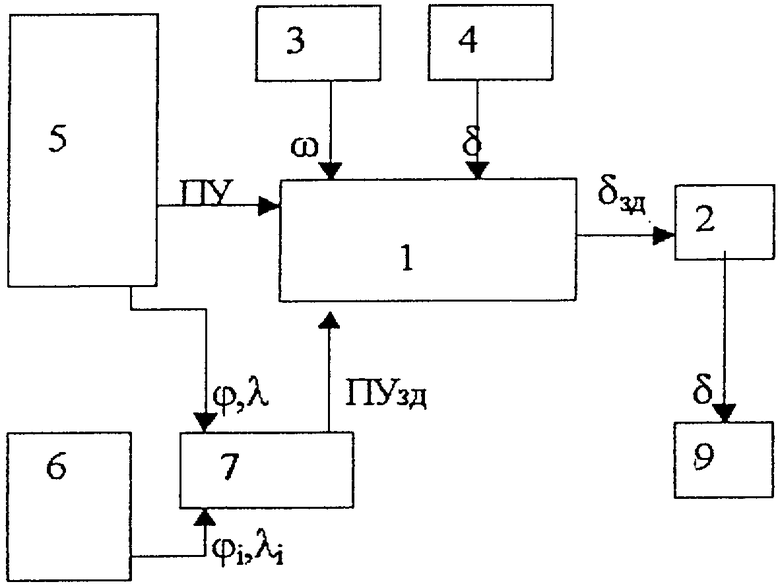
Способ автоматического управления движением судна с использованием приемника спутниковой навигационной системы, рулевого привода и регулятора-сумматора, на вход которого подают сигнал угловой скорости судна, сигнал угла перекладки руля и сигнал текущего путевого угла, суммарный управляющий сигнал с выхода регулятора-сумматора подают на вход рулевого привода, отличающийся тем, что для формирования сигналов заданных значений путевого угла, вводимых на соответствующий вход регулятора-сумматора, используют получаемые из блока траектории заданного маршрута сигналы заданных значений широты и долготы точек поворота судна и получаемые из приемника спутниковой навигационной системы сигналы текущей широты и долготы судна, в начале плавания сигнал заданного значения путевого угла формируют по текущим значениям широты и долготы судна в начальный момент времени Т0 и заданным значениям широты и долготы первой точки поворота судна, соответствующей моменту времени T1, через интервал времени Δt в момент времени T0+Δt формируют модуль первой разности между сигналом текущей широты судна и сигналом широты точки первого поворота судна, соответствующей моменту времени T1, и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки первого поворота судна, соответствующей моменту времени T1, при этом, если модуль первой разности больше уставки С или модуль второй разности больше уставки С, формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в момент времени T0+Δt и заданным значениям широты и долготы точки первого поворота судна, соответствующей моменту времени T1, выработку заданного путевого угла через интервалы времени Δt производят аналогично до момента времени T0+mΔt, в этот момент времени, когда модуль первой разности между сигналом текущей широты судна и сигналом широты точки первого поворота судна, соответствующей моменту времени T1, и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки первого поворота судна, соответствующей моменту времени T1, будут меньше уставки С, формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в момент времени T0+mΔt и заданным значениям широты и долготы точки второго поворота судна, соответствующей моменту времени Т2, в следующие интервалы времени Δt от T0+(m+1)Δt до T0+(m+n-1)Δt, когда модуль первой разности больше уставки С или модуль второй разности больше уставки С, формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки второго поворота судна, соответствующей моменту времени Т2, когда в момент времени T0+(m+n)Δt модуль первой разности между сигналом текущей широты судна и сигналом широты точки второго поворота судна, соответствующей моменту времени Т2, и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки второго поворота судна, соответствующей моменту времени T2, будут меньше уставки С, формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки третьего поворота судна, соответствующей моменту времени Т3, в следующие интервалы времени Δt, если модуль первой разности больше уставки С или модуль второй разности больше уставки С, формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки третьего поворота судна, соответствующей моменту времени Т3, аналогично формируют заданное значение путевого угла для четвертой, пятой и остальных точек вплоть до последней точки окончания маршрута судна.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 1999 |
|
RU2151713C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Способ автоматического управления движением судна на траектории | 1988 |
|
SU1618700A1 |

