Изобретение относится к системам управления судами и в частности к системам управления курсом и режимами работы главного двигателя судна.
Известны системы автоматического управления движением судна (см., например, патент RU 2463205 С2, 2012 г.; (RU 2292289 C1, 27.01.2007)).
Известные системы управления движением судна состоят из приемника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения курсового угла и сумматора, в котором по сигналам текущего значения курсового угла, заданного значения курсового угла и угловой скорости судна формируется сигнал управления рулевым приводом судна.
Однако указанные аналоги имеют недостатки, заключающиеся в том, что они обеспечивают только автоматическое управление судном по курсу, и при необходимости выполнения аварийного торможения с помощью руля осуществляется переход на следящее управление рулем судна и режимами работы главного двигателя, что требует высокой квалификации вахтенного штурмана.
Наиболее близкой по технической сущности к заявленному устройству является «Система управления движением судна», патент RU 2248914. Известная система состоит из датчика и задатчика курса, датчика угловой скорости, датчика кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого, в свою очередь, соединен с входом рулевого привода кормовых рулей. Выходы датчика угла дрейфа и датчика носовых рулей подключены к первому входу второго сумматора-усилителя, датчика и задатчика бокового смещения судна. Задатчик допустимого угла дрейфа соединен с блоком логики, содержащим алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с двумя нормально-разомкнутыми и одной нормально-замкнутой контактными группами. Нормально-разомкнутые контакты электромагнитного реле через первый и второй выходы блока логики соединены соответственно со вторым и третьим входами второго сумматора-усилителя. Выходы датчика и задатчика бокового смещения судна через первый и второй входы блока логики, алгебраический сумматор и нормально-замкнутую контактную группу электромагнитного реле соединены с третьим выходом блока логики. Третий вход блока логики соединен с первым входом сумматора модулей двух сигналов и первой нормально-разомкнутой контактной группой, а также с выходом датчика угла дрейфа. Четвертый вход блока логики соединен со вторым входом сумматора модулей двух сигналов и второй нормально-разомкнутой контактной группой электромагнитного реле, а также с выходом задатчика допустимого угла дрейфа. Выход сумматора модулей двух сигналов через диод соединен с обмоткой управления электромагнитного реле.
Недостатком ближайшего аналога является относительно низкая эффективность аварийного торможения с помощью руля, при этом требуется высокая квалификация вахтенного штурмана для реализации им сложной последовательности действий в рамках рассмотренной системы управления курсом судна.
Техническим результатом от применения заявленного устройства является повышение эффективности и упрощение процедуры аварийного торможения судна за счет автоматического изменения курса и скорости судна.
Для достижения указанного технического результата в заявленное устройство аварийного торможения судна с помощью руля (УАТПР), фиг. 1, содержащее блок управления курсом (БУК) (4), блок навигации (БН) (6), первый выход (6.1) которого подключен к третьему входу (4.3) БУК (4), дополнительно введены: блок аварийного управления рулем (БАУР) (1), блок аварийного управления главным двигателем (БАУГД) (2), блок изменения курса и скорости (БИКС) (3) и блок управления главным двигателем (БУГД) (5) судна. Первый (3.1), второй (3.2), третий (3.3), четвертый (3.4), пятый (3.5) и шестой (3.6) выходы БИКС (3) соединены соответственно с первым (2.1), вторым (2.2), третьим (2.3), четвертым (2.4), пятым (2.5) и шестым (2.6) входами БАУГД (2). Первый (3.1), второй (3.2) и третий (3.3) выходы БИКС (3) соединены соответственно со вторым (1.2), третьим (1.3) и вторым (1.2) входами БАУР (1). Первый (1.1) и четвертый (1.4) входы БАУР (1), седьмой (3.7), восьмой (3.8), девятый (3.9), десятый (3.10) и одиннадцатый (3.11) входы БИКС (3) соединены соответственно с девятым (2.9) выходом БАУГД (2) и двенадцатым (3.12) выходом БИКС (3), с седьмым (2.7) выходом БАУГД (2), вторым (6.2) и первым (6.1) выходами БН (6), с шестым (1.6) и пятым (1.5) выходами БАУР(1). Восьмой (2.8) выход БАУГД (2), седьмой (1.7), восьмой (1.8) и девятый (1.9) выходы БАУР (1) соединены соответственно со вторым (5.2) входом БУГД (5), первым (4.1) и вторым (4.2) входами БУК (4) и первым (5.1) входом БУГД (5). Первый выход (6.1) БН (6), кроме того, соединен с третьим (4.3) входом БУК (4).
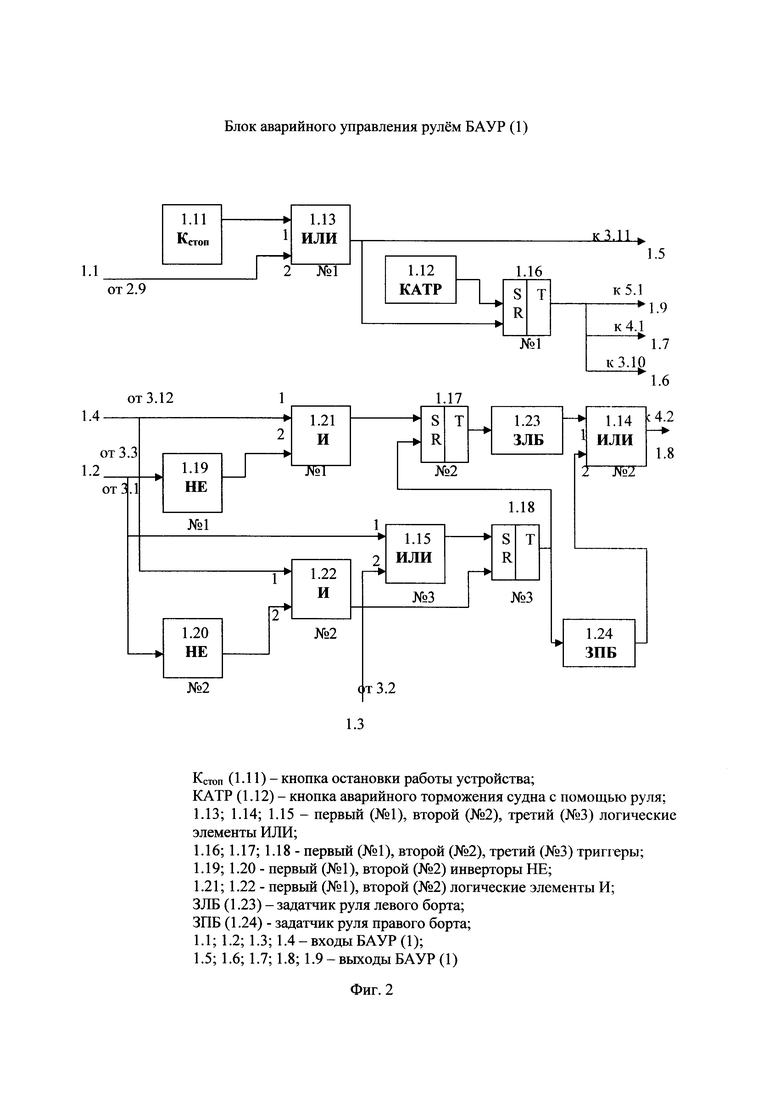
БАУР (1), фиг. 2, состоит из кнопки «Стоп» (Кстоп) (1-11), кнопки аварийного торможения с помощью руля (КАТР) (1.12), первого (1.13), второго (1.14) и третьего (1.15) элементов «ИЛИ», первого (1.16), второго (1.17) и третьего (1.18) триггеров, первого (1.19) и второго (1.20) инверторов, первого (1.21) и второго (1.22) элементов «И», задатчика левого борта руля (ЗЛБ) (1.23) и задатчика правого борта руля (ЗПБ) (1.24). Кнопка Кстоп (1.11) соединена с первым входом первого элемента «ИЛИ» (1.13), второй вход которого является первым входом (1.1) БАУР (1), а выход первого элемента «ИЛИ» (1.13) является пятым выходом (1.5) БАУР (1) и соединен с входом R первого триггера (1.16), вход S которого соединен с выходом КАТР (1.12). Выход первого триггера (1.16) является девятым (1.9), седьмым (1.7) и шестым (1.6) выходами БАУР (1). Четвертый вход (1.4) БАУР (1) соединен с первым входом первого элемента «И» (1.21), второй вход которого подключен к выходу первого инвертора «НЕ» (1.19), вход которого является вторым входом (1.2) БАУР (1). Выход первого элемента «И» (1.21) соединен с входом S второго триггера (1.17), вход R которого соединен с выходом третьего триггера (1.18), вход S которого подключен к выходу третьего элемента «ИЛИ» (1.15). Вход R третьего триггера (1.18) соединен с выходом второго элемента «И» (1.22), второй вход которого подключен к выходу второго элемента «НЕ» (1.20), вход которого является вторым входом (1.2) БАУР (1). Кроме того вход (1.2) БАУР (1) подключен к входу первого элемента «НЕ» (1.19). Первый вход второго элемента «И» (1.22) является четвертым входом (1.4) БАУР (1). Выходы второго (1.17) и третьего (1.18) триггеров подключены соответственно ко входам ЗЛБ (1.23) и ЗПБ (1.24), выходы которых подключены соответственно к первому и второму входам второго элемента «ИЛИ» (1.14), выход которого является восьмым выходом (1.8) БАУР(1).
БАУГД (2), фиг. 3, состоит из датчика остановки главного двигателя (Дстоп) (2.11), первого (2.12), второго (2.13), третьего (2.14) и четвертого (2.15) триггеров, задатчиков: среднего хода (ЗСХ) (2.16), малого хода (ЗМХ) (2.17), самого малого хода (ЗСМХ) (2.18), полного хода назад (ЗПХН) (2.19) и элемента «ИЛИ» (2.20). Выход Дстоп (2.11) является девятым (2.9) и седьмым (2.7) выходами БАУГД(2). Шестой вход (2.6) БАУГД (2) соединен с входом S первого триггера (2.12), третий вход (2.3) БАУГД (2) соединен с входом R первого триггера (2.12) и со входом S второго триггера (2.13). Второй (2.2) вход БАУГД (2) соединен с входом R второго триггера (2.13) и с входом S третьего триггера (2.14). Первый (2.1) вход БАУГД (2) соединен с входом R третьего триггера (2.14) и входом S четвертого триггера (2.15), вход R которого является четвертым входом (2.4) БАУГД (2). Выходы первого (2.12), второго (2.13), третьего (2.14) и четвертого (2.15) триггеров соединены с входами соответственно ЗСХ (2.16), ЗМХ (2.17), ЗСМХ (2.18) и ЗПХН (2.19), выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами элемента «ИЛИ» (2.20), пятый вход которого является пятым входом (2.5) БАУГД (2). Выход элемента «ИЛИ» (2.20) является восьмым выходом (2.8) БАУГД (2).
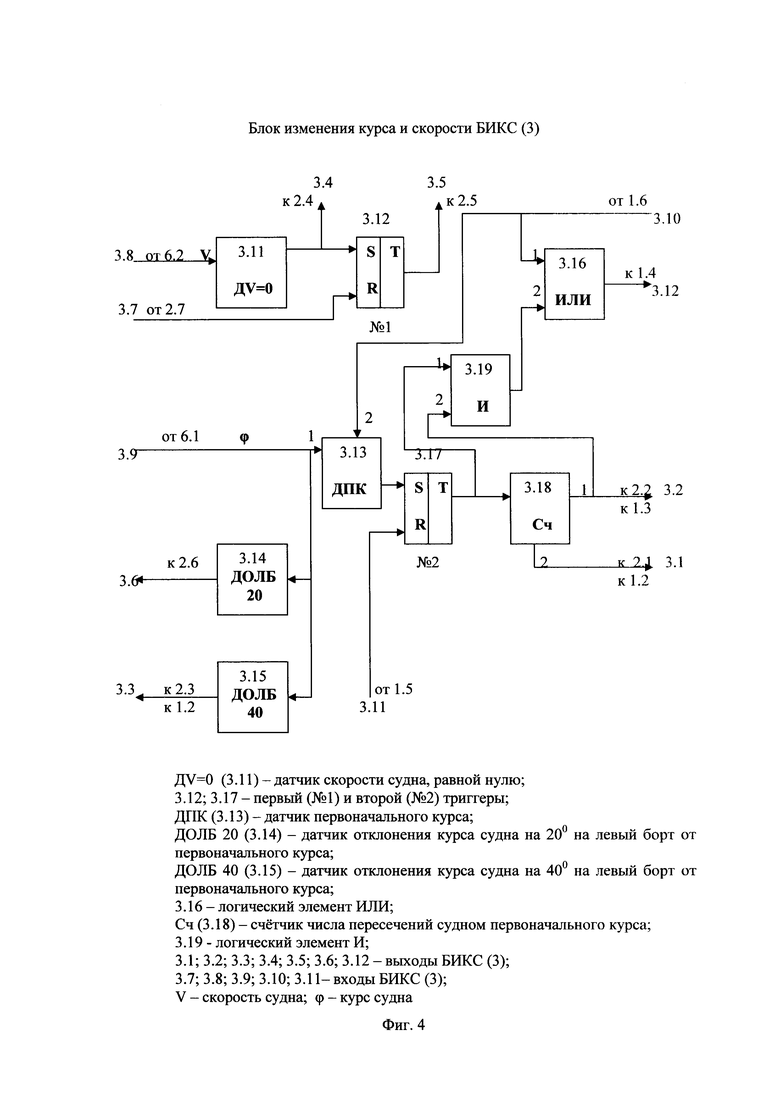
БИКС (3), фиг. (4), состоит из датчика скорости судна, равной нулю, (ДV=0) (3.11), первого (3.12) и второго (3.17) триггеров, элемента «ИЛИ» (3.16), счетчика пересечения первоначального курса (Сч) (3.18), элемента «И» (3.19), датчика первоначального курса (ДПК) (3.13), датчика отклонения судна от первоначального курса на левый борт на 20 градусов (ДОЛБ20) (3.14) и датчика отклонения судна от первоначального курса на левый борт на 40 градусов (ДОЛБ40) (3.15). Вход ДV=0 (3.11) является восьмым входом (3.8) БИКС (3), а выход ДV=0 (3.11) является четвертым выходом (3.4) БИКС (3) и соединен со входом S первого триггера (3.12), вход R которого является седьмым (3.7) входом БИКС (3). Выход первого триггера (3.12) является пятым (3.5) выходом БИКС (3). Девятый (3.9) вход БИКС (3) соединен с первым входом ДПК (3.13) и с входами ДОЛБ20 (3.14), ДОЛБ40 (3.15), выходы которых (ДОЛБ20, ДОЛБ40) являются соответственно шестым (3.6) и третьим (3.3) выходами БИКС (3). Второй вход ДПК (3.13) является десятым (3.10) входом БИКС (3) и соединен с первым входом элемента «ИЛИ» (3.16), второй вход которого подключен к выходу элемента «И» (3.19). Выход ДПК (3.13) соединен с входом S второго триггера (3.17), вход R которого является одиннадцатым (3.11) входом БИКС (3). Выход второго триггера (3.17) соединен с входом Сч (3.18) и первым входом элемента «И» (3.19), второй вход которого соединен с первым выходом Сч (3.18), который является вторым (3.2) выходом БИКС (3). Второй выход Сч (3.18) является первым выходом (3.1) БИКС (3). Выход элемента «И» (3.19) соединен с вторым входом элемента «ИЛИ» (3.16), первый вход которого является десятым (3.10) входом БИКС (3), а выход является двенадцатым (3.12) выходом БИКС (3).
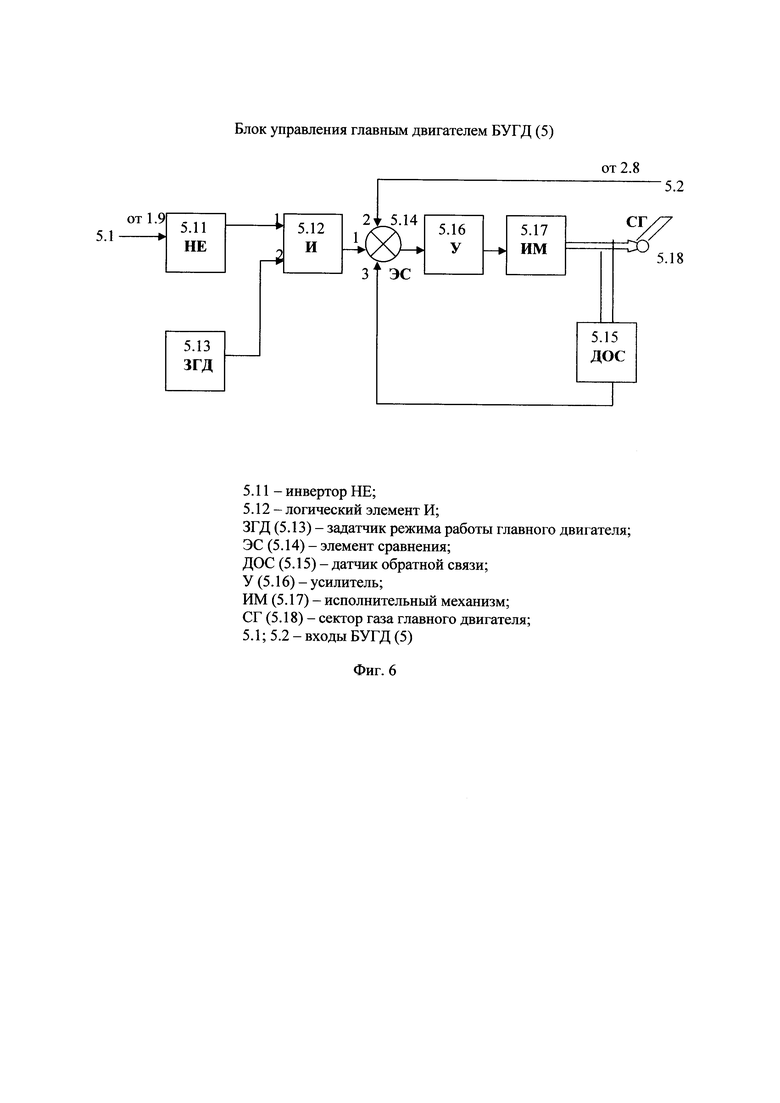
БУГД (5), фиг. 6, состоит из задатчика режимов работы главного двигателя (ЗГД) (5.13), элемента сравнения (ЭС) (5.14), инвертора (5.11), логического элемента «И» (5.12), усилителя (У) (5.16), исполнительного механизма (ИМ) (5.17), сектора газа (СГ) (5.18) и датчика обратной связи (ДОС) (5.15). Первый вход (5.1) БУГД (5) через инвертор (5.11) соединен с первым входом логического элемента «И» (5.12), второй вход которого соединен с ЗГД (5.13), а выход логического элемента «И» (5.12) соединен с первым входом ЭС (5.14), второй и третий входы которого являются соответственно вторым входом (5.2) БУГД (5) и выходом ДОС (5.15). Выход ЭС (5.14) соединен через усилитель (У) (5.16) с исплонительным механизмом (ИМ) (5.17), механически связанным с сектором газа (СГ) (5.18) и датчиком обратной связи (ДОС) (5.15).
Благодаря новой совокупности существенных признаков за счет введения блока аварийного управления рулем (БАУР), блока изменения курса и скорости (БИКС), блока аварийного управления главным двигателем (БАУГД) и блока управления главным двигателем (БУГД) осуществляется эффективное автоматическое аварийное торможение судна с помощью руля. Этим достигается простота торможения судна и снижение его выбега по сравнению с торможением ближайшим аналогом при сохранении генерального направления его движения, что повышает безопасность управления судном.
Заявленное устройство поясняется чертежами:
фиг. 1 - устройство аварийного торможения судна с помощью руля (УАТПР);
фиг. 2 - блок аварийного управления рулем (БАУР) (1);
фиг. 3 - блок аварийного управления главным двигателем (БАУГД) (2);
фиг. 4 - блок изменения курса и скорости (БИКС) (3);
фиг. 5 - блок управления курсом (БУК) (4);
фиг. 6 - блок управления главным двигателем (БУГД) (5);
фиг. 7 - блок навигации (БН) (6).
Устройство аварийного торможения судна с помощью руля, фиг. 1, состоит из БАУР (1), БАУГД (2), БИКС (3), БУК (4), БУГД (5) и БН (6). Девятый выход (1.9) БАУР (1) соединен с первым входом (5.1) БУГД (5), второй вход которого (5.2) соединен с выходом (2.8) БАУГД (2), а выходы седьмой (1.7) и восьмой (1.8) БАУР (1) соединены соответственно с первым (4.1) и вторым (4.2) входами БУК (4), третий вход (4.3) которого соединен с первым выходом (курсовой угол - ϕ) (6.1) БН (6) и девятым входом (3.9) БИКС (3).
Восьмой вход (3.8) БИКС (3) соединен со вторым выходом (скорость - V) (6.2) БН (6), а первый (3.1), второй (3.2), третий (3.3), четвертый (3.4), пятый (3.5) и шестой (3.6) выходы БИКС (3) соединены соответственно с первым (2.1), вторым (2.2), третьим (2.3), четвертым (2.4), пятым (2.5) и шестым (2.6) входами БАУГД (2). Кроме того, первый (3.1), второй (3.2), третий (3.3) выходы БИКС (3) и девятый (2.9) БАУГД (2) соединены ответственно с вторым (1.2), третьим (1.3), вторым (1.2) и первым (1.1) входами БАУР (1). Пятый (1.5) и шестой (1.6) выходы БАУР (1) соединены соответственно с одиннадцатым (3.11) и десятым (3.10) входами БИКС (3), седьмой (3.7) вход которого соединен с седьмым выходом БАУГД (2).
БАУР (1), фиг. 2, состоит из кнопки «Стоп» (Кстоп) (1.11), кнопки аварийного торможения с помощью руля (КАТР) (1.12), первого (1.13), второго (1.14) и третьего (1.15) элементов «ИЛИ», первого (1.16), второго (1.17) и третьего (1.18) триггеров, первого (1.19) и второго (1.20) инверторов «НЕ», первого (1.21) и второго (1.22) элементов «И», задатчика левого борта руля (ЗЛБ) (1.23) и задатчика правого борта руля (ЗПБ) (1.24). Кнопка Кстоп (1.11) соединена с первым входом первого элемента «ИЛИ» (1.13) БАУР (1), второй вход которого соединен с первым входом (1.1) БАУР (1), а выход элемента «ИЛИ» (1.13) соединен с пятым выходом (1.5) БАУР (1) и входом R первого триггера (1.16), вход S которого соединен с выходом КАТР (1.12), а выход первого триггера (1.16) соединен с девятым (1.9), с седьмым (1.7) и с шестым (1.6) выходами БАУР (1). Четвертый вход (1.4) БАУР (1) соединен с первым входом первого элемента «И» (1.21) БАУР (1), второй вход которого соединен через первый инвертор (1.19) с входом (1.2) БАУР (1), а выход элемента «И» (1.21) соединен с входом S второго триггера (1.17) БАУР (1). Вход (1.2) БАУР (1), кроме того, соединен с первым входом третьего элемента «ИЛИ» (1.15) БАУР (1), второй вход которого соединен с входом (1.3) БАУР (1), а выход элемента «ИЛИ» (1.15) соединен с входом S третьего триггера (1.18) БАУР (1), вход R которого соединен с выходом второго элемента «И» (1.22), первый вход которого соединен с входом (1.4) БАУР (1), а второй вход элемента «И» (1.22) через второй инвертор (1.20) соединен со входом (1.2) БАУР (1). Выход второго триггера (1.17) БАУР (1) соединен с входом ЗЛБ (1.23), выход которого соединен через первый вход второго элемента «ИЛИ» (1.14) с выходом (1.8) БАУР (1). Выход третьего триггера (1.18) БАУР (1) соединен с входом R второго триггера (1.17) и со входом ЗПБ (1.24) БАУР (1). Выход ЗПБ (1.24) соединен через второй вход второго элемента «ИЛИ» (1.14) БАУР (1) с выходом (1.8) БАУР.
БАУГД (2), фиг. 3, состоит из датчика остановки главного двигателя (Дстоп) (2.11), первого (2.12), второго (2.13), третьего (2.14) и четвертого (2.15) триггеров, задатчиков: среднего хода (ЗСХ) (2.16), малого хода (ЗМХ) (2.17), самого малого хода (ЗСМХ) (2.18), полного хода назад (ЗПХН) (2.19) и элемента «ИЛИ» (2.20). Выход Дстоп (2.11) соединен с девятым (2.9) и седьмым (2.7) выходами БАУГД (2). Шестой вход (2.6) БАУГД (2) соединен с входом S первого триггера (2.12), третий вход (2.3) БАУГД (2) соединен с входом R первого триггера (2.12) и со входом S второго триггера (2.13). Второй вход (2.2) БАУГД (2) соединен с входом R второго триггера (2.13) и с входом S третьего триггера (2.14). Первый вход (2.1) БАУГД (2) соединен совходом R третьего триггера (2.14) и входом S четвертого триггера (2.15), вход R которого соединен с четвертым входом (2.4) БАУГД (2). Выходы всех триггеров: (2.12), (2.13), (2.14) и (2.15) соединены соответственно через ЗСХ (2.16), ЗМХ (2.17), ЗСМХ (2.18) и ЗПХН (2.19) с первым, вторым, третьим и четвертым входами элемента «ИЛИ» (2.20), пятый вход которого соединен с пятым входом (2.5) БАУГД (2), а выход соединен с восьмым выходом (2.8) БАУГД (2).
БИКС (3), фиг. 4, состоит из датчика скорости судна, равной нулю, (ДV=0) (3.11), первого (3.12) и второго (3.17) триггеров, элемента «ИЛИ» (3.16), счетчика пересечения первоначального курса (Сч) (3.18), элемента «И» (3.19), датчика первоначального курса (ДПК) (3.13), датчика отклонения судна от первоначального курса на левый борт на 20 градусов (ДОЛБ20) (3.14) и датчика отклонения судна от первоначального курса на левый борт на 40 градусов (ДОЛБ40) (3.15). Вход ДV=0 (3.11) соединен с восьмым входом (3.8) БИКС (3), а выход (3.11) соединен с четвертым выходом (3.4) БИКС (3) и входом S первого триггера (3.12), вход R которого соединен с седьмым входом (3.7) БИКС (3), а выход первого триггера (3.12) соединен с пятым (3.5) выходом БИКС (3). Девятый вход (3.9) БИКС (3) соединен с первым входом ДПК (3.13) и с входами соответственно ДОЛБ20 (3.14), ДОЛБ40 (3.15), выходы которых ((3.14) и (3.15)) соединены соответственно с шестым (3.6) и третьим (3.3) выходами БИКС (3). Второй вход ДПК (3.13) соединен с десятым (3.10) входом БИКС (3) и с первым входом элемента «ИЛИ» (3.16), а выход ДПК (3.13) соединен с входом S второго триггера (3.17), вход R которого соединен с одиннадцатым (3.11) входом БИКС (3). Выход второго триггера (3.17) соединен с входом Сч (3.18) и первым входом элемента «И» (3.19), второй вход которого соединен с первым выходом Сч (3.18), соединенным со вторым выходом (3.2) БИКС (3), а второй выход Сч (3.18) соединен с первым выходом (3.1) БИКС (3). Выход элемента «И» (3.19) соединен со вторым входом элемента «ИЛИ» (3.16), первый вход которого соединен с десятым (3.10) входом БИКС (3), а выход соединен с двенадцатым (3.12) выходом БИКС (3).
БУК (4), фиг. 5, предназначен для изменения положения руля направления по сигналам БАУР (1) и содержит входы: 4.1, 4.2, 4.3.
БУГД (5), фиг. 6, предназначен для изменения режимов работы главного двигателя по сигналам управления БАУГД (2) и состоит из задатчика режимов работы главного двигателя ЗГД (5.13), элемента сравнения ЭС (5.14), инвертора (5.11), логического элемента «И» (5.12), усилителя (5.16), исполнительного механизма ИМ (5.17), сектора газа СГ (5.18) и датчика обратной связи ДОС (5.15). Первый вход (5.1) БУГД (5) через инвертор (5.11) соединен с первым входом логического элемента «И» (5.12), второй вход которого соединен с ЗГД (5.13), а выход соединен с первым входом ЭС (5.14). Второй и третий входы ЭС (5.14) соединены соответственно с вторым входом (5.2) БУГД и с выходом ДОС (5.15), а выход ЭС (5.14) соединен через усилитель У (5.16) с исполнительным механизмом ИМ (5.17), механически связанным с сектором газа СГ (5.18) и датчиком обратной связи ДОС (5.15).
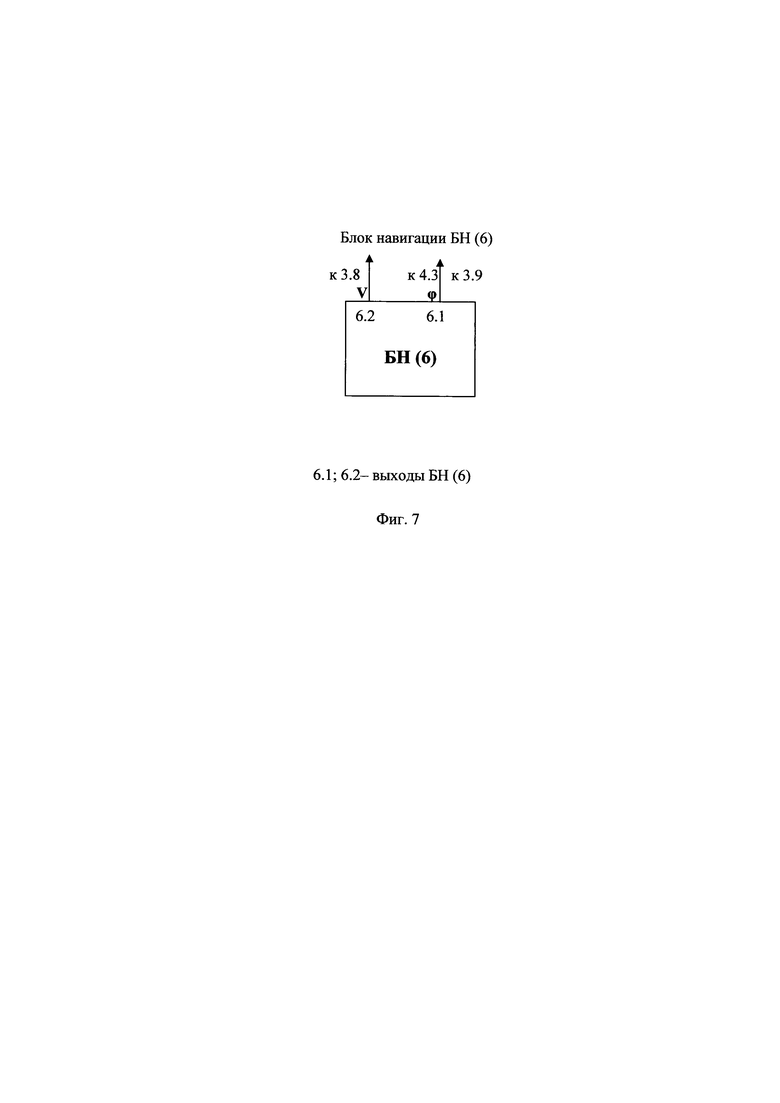
БН (6), фиг. 7, предназначен для выработки сигнала по курсу судна, поступающему в БИКС (3) и содержит выходы по курсу судна (ϕ) 6.1 и по скорости (V) 6.2.
Устройство, фиг. 1, работает следующим образом. В исходном состоянии, когда судно движется прямым курсом, работает БУК (4), получая информацию по курсу судна (ϕ) на вход (4.3) БУК (4) от выхода 6.1 БН (6), фиг. 1, и обеспечивая стабилизацию курса судна, а БУГД (5), фиг. 6, обеспечивает заданный режим работы главного двигателя ГД от ЗГД (5.13), так как элемент «И» (5.12) открыт, ввиду того, что на входе (5.1) БУГД (5), фиг. 6, сигнал равен нулю, поэтому на выходе инвертора «НЕ» (5.11) реализуется сигнал управления. Этот сигнал поступает на первый вход элемента «И» (5.12), обеспечивая его открытие. В силу этого сигнал от задатчика ЗГД (5.13) приходит на вход 1 элемента сравнения (ЭС) (5.14), обеспечивая поддержание заданного режима работы главного двигателя следящей системой, состоящей из элемента сравнения (ЭС) (5.14), усилителя (У) (5.16), исполнительного механизма (ИМ) (5.17), сектора газа главного двигателя (СГ) (5.18) и датчика обратной связи (ДОС) (5.15).
При нажатии кнопки КАТР (1.12) БАУР (1), фиг. 2, сигнал управления с ее выхода поступает на вход S первого триггера (1.16) БАУР (1), который включается и на его выходе появляется управляющий сигнал, который поступает на выходы (1.9), (1.7) и (1.6) БАУР (1).
Сигнал с выхода (1.9) БАУР (1) поступает на вход (5.1) БУГД (5), фиг. 6, и, преобразуясь инвертором (5.11) БУГД (5), поступает на первый вход элемента «И» (5.12) БУГД (5) запирая его, и прекращая, тем самым, поступление сигнала от задатчика (5.13) через элемент «И» (5.12) на первый вход элемента сравнения (ЭС) (5.14) БУГД (5).
Одновременно сигнал с выхода первого триггера (1.16) БАУР (1), фиг. 2, поступает на выход (1.7) БАУР (1), фиг. 1 соединенный с входом (4.1) БУК (4), обеспечивая, тем самым, отключение выхода (6.1) БН (6) по каналу курса судна (ϕ), от БУК (4), (фиг. 1) и подключение следящего канала БУК (4) для перекладки руля на левый борт
Сигнал управления с выхода (1.6) БАУР (1), фиг. 1, поступает на вход (3.10) БИКС (3). Сигнал с входа (3.10) БИКС (3), фиг. 4, поступает на вход (2) ДПК (3.13) БИКС (3) и фиксирует первоначальный курс судна, а также поступает на вход 1 элемента «ИЛИ» (3.16) БИКС (3) и далее на выход (3.12) БИКС (3), который соединен со входом (1.4) БАУР (1), фиг. 2.
Так как на входе (1.2) БАУР (1), фиг. 2, сигнал отсутствует, (значение сигнала равно нулю), то на выходе первого инвертора «НЕ» (1.19) установится единичный сигнал, который поступает на вход (2) первого элемента «И» (1.21). На вход 1 первого элемента «И» (1.21) поступает сигнал управления с входа (1.4), соединенного с выходом (3.12) БИКС (3), фиг. 4, поэтому на выходе первого элемента «И» (1.21), фиг. 2, возникнет сигнал управления, который поступает на вход S второго триггера (1.17) БАУР (1) и включает его.
Сигнал с выхода второго триггера (1.17) БАУР (1), фиг. 2, включает ЗЛБ (1.23) БАУР (1), сигнал, с выхода которого, поступает через вход 1 второго элемента «ИЛИ» (1.14) на выход (1.8) БАУР (1), соединенный с входом (4.2), БУК (4), фиг. 5, и обеспечивает, тем самым, поступление в БУК (4) сигнала управления на следящий канал управления рулем судна.
Судно уходит на левый борт относительно первоначального курса и, когда угол отклонения курса от первоначального достигнет 20 градусов, включается ДОЛБ20 (3.14) БИКС (3), фиг. 4, на выходе которого появляется сигнал управления, который поступает на выход (3.6) БИКС (3), соединенный с входом (2.6) БАУГД (2), фиг. 3.
Этот сигнал далее поступает на вход S первого триггера (2.12) БАУГД (2), фиг. 3, и включает его. Сигнал с выхода первого триггера (2.12) поступает на ЗСХ (2.16) БАУГД (2) и включает его. Сигнал с выхода ЗСХ (2.16) через вход (1) элемента «ИЛИ» (2.20) поступает на выход (2.8) БАУГД (2), который соединен с входом (5.2) БУГД (5), фиг. 6. Сигнал со входа (5.2) БУГД (5) поступает на вход (2) элемента сравнения (ЭС) (5.14) и через усилитель (У) (5.16), ИМ (5.17) и ДОС (5.15) БУГД (5) перекладывает сектор газа (СГ) (5.18) главного двигателя на режим среднего хода.
Судно продолжает уклоняться на левый борт и, когда отклонение от первоначального курса составит 40 градусов, включается ДОЛБ40 (3.15) БИКС (3), фиг. 4, сигнал управления, с выхода которого, поступает на выход (3.3) БИКС (3), соединенный с входом (1.2) БАУР (1), фиг. 2, и входом (2.3) БАУГД (2), фиг. 3.
Сигнал с входа (1.2) БАУР (1), фиг. 2, поступает через первый вход третьего элемента «ИЛИ» (1.15) БАУР (1) и с его выхода поступает на вход S третьего триггера (1.18) БАУР (1) и включает его. Сигнал с выхода третьего триггера (1.18) поступает на вход R второго триггера (1.17) БАУР (1) и отключает его, отключая тем самым ЗЛБ (1.23) от элемента «ИЛИ» (1.14) и далее от выхода (1.8) БАУР (1).
Сигнал с входа (1.2) БАУР (1), фиг. 2, преобразуясь первым инвертором (1.19) БАУР (1), запирает первый элемент «И» (1.21) БАУР (Г), прекращая тем самым поступление сигнала на вход S второго триггера (1.17) БАУР (1).
Одновременно сигнал с выхода третьего триггера (1.18), фиг. 2, подключает ЗПБ (1.24) БАУР (1), сигнал управления, с выхода которого через вход (2) второго элемента «ИЛИ» (1.14) БАУР (1) поступает к выходу (1.8) БАУР (1), соединенному с входом (4.2) БУК (4), фиг. 3, который обеспечивает перекладку руля направления на правый борт.
Сигнал с входа (1.2) БАУР (1), фиг. 2, кроме того, через второй инвертор «НЕ» (1.20) БАУР (1) поступает на вход (2) второго элемента «И» (1.22), который запирается, что дополнительно обеспечивает открытие третьего триггера (1.18) БАУР (1).
Сигнал управления с выхода (3.3) БИКС (3), фиг. 4, поступает на вход (2.3) БАУГД (2), фиг. 3, и, далее, на вход R первого триггера (2.12) БАУГД (2), тем самым закрывает его и отключает ЗСХ (2.16) БАУГД (2) от управления главным двигателем судна.
Сигнал с входа (2.3) БАУГД (2), фиг. 3, также поступает на вход S триггера (2.13) БАУГД (2), включает его, а сигнал с его выхода включает ЗМХ (2.17), сигнал, с выхода которого, через вход (2) элемента «ИЛИ» (2.20) поступает на выход (2.8) БАУГД (2), соединенный с входом (5.2) БУГД (5), фиг. 6.
Сигнал с входа (5.2) БУГД (5), фиг. 6, поступает на вход (2) элемента сравнения (ЭС) (5.14) БУГД (5), обеспечивая тем самым перекладку сектора газа (СГ) (5.18) на режим малого хода главного двигателя судна.
После пересечения судном первоначального курса на выходе ДПК (3.13) БИКС (3), фиг. 4, появляется сигнал управления, который поступает на вход S второго триггера (3.17) БИКС (3) и включает его.
Сигнал с выхода второго триггера (3.17) БИКС (3), фиг. 4, поступает на первый вход элемента «И» (3.19) БИКС (3), а также включает счетчик Сч (3.18) БИКС (3), сигнал с первого выхода которого поступает на вход (2) элемента «И» (3.19) БИКС (3) и открывает его.
Сигнал с выхода элемента «И» (3.19) БИКС (3), фиг. 4, через вход (2) элемента «ИЛИ» (3.16) БИКС (3) поступает на выход (3.12) БИКС (3), соединенный с входом (1.4) БАУР (1), фиг. 2.
Сигнал управления с входа (1.4) БАУР (1), фиг. 2, поступает на вход (1) первого элемента «И» (1.21), на вход (2) которого также поступает единичный сигнал с инвертора «НЕ» (1.19), так как на входе (1.2) БАУР (1) сигнал отсутствует.
Первый элемент «И» (1.21), фиг. 2, включается и сигнал с его выхода поступает на вход S второго триггера (1.17) БАУР (1) и включает его. Сигнал с выхода второго триггера (1.17) БАУР (1) поступает на ЗЛБ (1.23), сигнал управления с выхода которого, через вход (1) второго элемента «ИЛИ» (1.14) поступает на выход (1.8) БАУР (1), соединенный с входом (4.2) БУК (4) фиг. 5, обеспечивая тем самым перекладку руля направления на левый борт.
Одновременно сигнал с входа (1.4), фиг. 2, поступает на вход (1) второго элемента «И» (1.22), на входе (2) которого присутствует единичный сигнал с инвертора «НЕ» (1.20), так как на входе (1.2) БАУР (1) сигнал управления отсутствует.
Сигнал управления с выхода второго элемента «И» (1.22), фиг. 2, поступает на вход R третьего триггера (1.18) и отключает его, отключая тем самым ЗПБ (1.24) от входа (2) элемента «ИЛИ» (1.14) и от выхода (1.8) БАУР (1).
Сигнал с выхода (3.2) БИКС (3), фиг. 4, поступает на вход (2.2) БАУГД (2), фиг. 3, и, далее, на вход R второго триггера (2.13), отключая его и ЗМХ (2.17) через элемент «ИЛИ» (2.20) от БУГД (5) через выход (2.8) БАУГД (2), фиг. 3, и через вход (5.2) БУГД (5), фиг. 6. Также этот сигнал поступает на вход S третьего триггера (2.14), включает его, и подключает задатчик ЗСМХ (2.18) через третий вход элемента «ИЛИ» (2.20) к выходу (2.8) БАУГД (2), соединенному с входом (5.2) БУГД (5), фиг. 6, обеспечивая, тем самым, перекладку сектора газа (СГ) (5.18) БУГД (5), фиг. 6 в режим самого малого хода судна.
Между тем судно продолжает уклоняться вправо, а затем, постепенно, возвращается к первоначальному курсу. При возвращении на первоначальный курс срабатывает счетчик (Сч) (3.18) БИКС (3), фиг. 4, сигнал на первом выходе которого (Сч (3.18)) становится равным нулю, закрывая тем самым элемент «И» (3.19) БИКС (3) фиг. 4. На втором выходе Сч (3.18) появляется единичный сигнал, который поступает на выход (3.1) БИКС (3), соединенный с входом (1.2) БАУР (1), фиг. 2, и со входом (2.1) БАУГД (2), фиг. 3.
Сигнал с входа (1.2) БАУР (1), фиг. 2, через вход (1) третьего элемента «ИЛИ» (1.15) БАУР (1), поступает на вход S третьего триггера (1.18) БАУР (1), который включается.
В то же время снимается сигнал запрета включения третьего триггера (1.18) БАУР (1) фиг. 2, так как на выходе второго элемента «И» (1.22) сигнал будет равен нулю, поскольку второй элемент «И» (1.22) закрывается вторым инвертором «НЕ» (1.20).
Сигнал с выхода третьего триггера (1.18) БАУР (1) поступает на вход R второго триггера (1.17) и отключает его, отключая тем самым ЗЛБ (1.23) БАУР (1) от выхода (1.8) БАУР (1).
Одновременно сигнал с выхода третьего триггера (1.18) БАУР (1), фиг. 2, подключает ЗПБ (1.24), который через вход (2) второго элемента «ИЛИ» (1.14) БАУР (1) подключается к выходу (1.8) БАУР (1), соединенному с входом (4.2) БУК (4), фиг. 5, обеспечивая, тем самым, перекладку руля направления на правый борт.
Сигнал с выхода (3.1) БИКС (3), фиг. 4, поступает также на вход (2.1) БАУГД (2), фиг. 3, и, далее, на вход R третьего триггера (2.14) БАУГД (2), отключает его, отключая тем самым ЗСМХ (2.18) через элемент «ИЛИ» (2.20) БАУГД (2) от выхода (2.8) БАУГД (2). Сигнал управления с входа (2.1) БАУГД (2) также поступает на вход S четвертого триггера (2.15) БАУГД (2), включает его, а он, в свою очередь, включает ЗПХН (2.19), сигнал с выхода которого поступает через вход (4) элемента «ИЛИ» (2.20) на выход (2.8) БАУГД (2), соединенный с входом (5.2) БУГД (5), фиг. 6, обеспечивая, тем самым, перекладку сектора газа СГ (5.18) БУГД (5) на полный ход назад судна.
Прекращение движения судна, фиксируется датчиком ДУ=0 (3.11) БИКС (3), фиг. 4, на который поступает сигнал по скорости судна с выхода (6.2) БН (6), фиг. 7. Сигнал управления с выхода датчика ДV=0 (3.11), поступает на выход (3.4) БИКС (3) фиг. 4, соединенный с входом (2.4) БАУГД (2), фиг. 3, и на вход S первого триггера (3.12) БИКС (3). Первый триггер включается и подает сигнал на выход (3.5) БИКС (3), соединенный с входом (2.5) БАУГД (2), фиг. 3.
Сигнал с входа (2.4) БАУГД (2), фиг. 3, поступает на вход R четвертого триггера (2.15), закрывая его. Он, в свою очередь, закрывает ЗПХН (2.19) БАУГД (2).
Сигнал с входа (2.5) БАУГД (2), фиг. 3, поступает через вход (5) элемента «ИЛИ» (2.20) на выход (2.8) БАУГД (2), соединенный с входом (5.2) БУГД (5), фиг. 6, обеспечивая, тем самым, перевод сектора газа (СГ) (5.18) БУГД (5) в положение СТОП двигателя.
При остановке главного двигателя судна на выходе датчика Дстоп (2.11) БАУГД (2), фиг. 3, появится сигнал, который поступит на выход (2.9) БАУГД (2), соединенный с входом (1.1) БАУР (1), фиг. 2, а также на выход (2.7) БАУГД (2), соединенный с входом (3.7) БИКС (3), фиг. 4.
Вход (1.1) БАУР (1), фиг. 2, соединен через вход (2) первого элемента «ИЛИ» (1.13) с входом R первого триггера (1.16) БАУР (1), что обеспечивает его закрытие и приведение схемы БАУР (1) в исходное состояние.
Сигнал с входа (3.7) БИКС (3), фиг. 4, поступает на вход R первого триггера (3.12) БИКС (3) и закрывает его, приводя схему БИКС (3) в исходное состояние.
Кроме того, сигнал с выхода первого элемента «ИЛИ» (1.13) БАУР (1), фиг. 2, поступает на выход (1.5) БАУР (1), соединенный с входом (3.11) БИКС (3), фиг. 4, сигнал с которого поступает на вход R, второго триггера (3.17), фиг. 4, обеспечивая, тем самым, его закрытие и приведение счетчика (Сч) (3.18) БИКС (3) в исходное состояние.
Схема может быть приведена в исходное состояние при включении кнопки Кстоп (1.11) БАУР (1), фиг. 2, которая, через элемент «ИЛИ» (1.13) подает сигнал на выход (1.5) БАУР (1) и на вход R первого триггера (1.16) БАУР(1).
В качестве составных частей устройства использовались электронные элементы, описанные в работах: К.Ф. Ибрагим. Основы электронной техники, Москва, Мир, 1997; Ю.К. Выдренков. Системотехника, Военно-Морской инженерный институт, СПб, 2004; Пороговые устройства на элементах цифровой логики, электронный ресурс nauchebe.net>2012/09/porogovye-ustrojstva…logiki/; А.В. Лукутин, Е.Б. Шандарова. Элементы электроники. Издательство Томского политехнического университета, 2012.
Подтверждение возможности достижения указанных технических результатов при использовании заявленного устройства было определено испытаниями лабораторного макета, выполненного на логических элементах электронной техники, совместно с моделью источников информации и моделью продольного движении судна, реализованными на персональном компьютере.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ И ЦИРКУЛЯЦИИ | 2020 |
|
RU2752101C1 |
| Устройство аварийного торможения судна | 2022 |
|
RU2782325C1 |
| Устройство управления судном в штормовых условиях | 2023 |
|
RU2808705C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ДАННЫХ ПО РАДИОКАНАЛУ | 2002 |
|
RU2212107C1 |
| УСТАНОВКА ДЛЯ ФОРМОВКИ ПРЯМОШОВНЫХ СВАРНЫХ ТРУБ СВЕРХБОЛЬШОГО ДИАМЕТРА | 2011 |
|
RU2532754C1 |
| Микропрограммное вычислительное устройство | 1984 |
|
SU1229761A1 |
| Автоматическая система управления силовой установкой | 1983 |
|
SU1149044A1 |
| Устройство для передачи и приема цифровых сигналов | 1987 |
|
SU1467777A1 |
| МНОГОРАЗОВАЯ ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2164882C1 |
| Устройство для телеконтроля промежуточных станций системы связи | 1989 |
|
SU1635264A1 |


Изобретение относится к области судостроения и может быть использовано в системе управления курсом судна. Устройство аварийного торможения судна с помощью руля состоит из блока управления курсом (БУК), блока навигации (БН), блока управления режимами работы главного двигателя (БУГД), блока аварийного управления рулем (БАУР), блока аварийного управления главным двигателем (БАУГД) и блока изменения курса и скорости (БИКС) судна. Первый, второй, третий, четвертый, пятый и шестой выходы БИКС соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами БАУГД. Первый, второй и третий выходы БИКС соединены соответственно с входами вторым, третьим и вторым БАУР. Первый и четвертый входы БАУР, входы седьмой, восьмой, девятый, десятый и одиннадцатый БИКС соединены соответственно с выходами девятым БАУГД и двенадцатым БИКС, с выходами седьмым БАУГД, вторым, первым БН, шестым, пятым БАУР. Выходы: восьмой БАУГД, седьмой, восьмой, девятый БАУР соединены соответственно с входами вторым БУГД, первым и вторым БУК и первым БУГД. Повышается эффективность и простота торможения судна системой управления курсом. 4 з.п. ф-лы, 7 ил.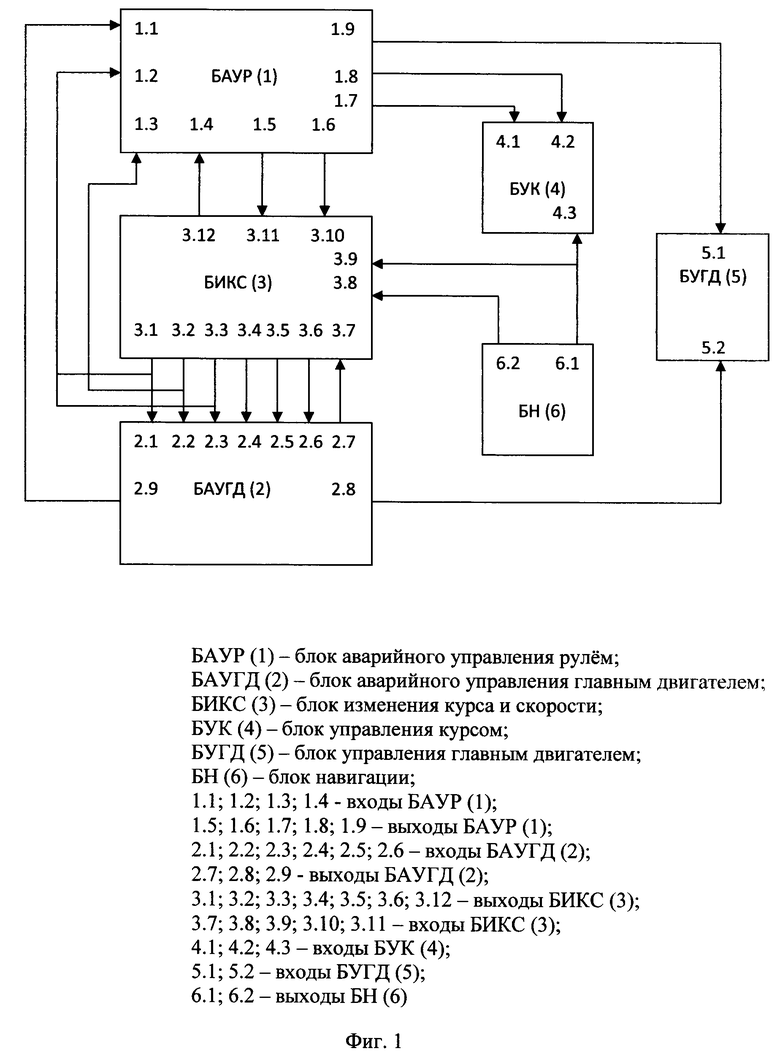
1. Устройство аварийного торможения судна с помощью руля (УАТСР), содержащее блок управления курсом (БУК) (4), блок навигации (БН) (6), первый вход (6.1) которого подключен к третьему входу (4.3) БУК (4), отличающееся тем, что дополнительно в УАТСР введены: блок аварийного управления рулем (БАУР) (1), блок аварийного управления главным двигателем (БАУГД) (2), блок изменения курса и скорости (БИКС) (3) и блок управления режимами работы главного двигателя (БУГД) (5) судна, при этом первый (3.1), второй (3.2), третий (3.3), четвертый (3.4), пятый (3.5) и шестой (3.6) выходы БИКС (3) соединены соответственно с первым (2.1), вторым (2.2), третьим (2.3), четвертым (2.4), пятым (2.5) и шестым (2.6) входами БАУГД (2), а первый (3.1), второй (3.2) и третий (3.3) выходы БИКС (3) соединены соответственно со вторым (1.2), третьим (1.3) и вторым (1.2) входами БАУР (1), а первый (1.1) и четвертый (1.4) входы БАУР (1), седьмой (3.7), восьмой (3.8), девятый (3.9), десятый (3.10) и одиннадцатый (3.11) входы БИКС (3) соединены соответственно с девятым (2.9) выходом БАУГД (2) и двенадцатым (3.12) выходом БИКС (3), с седьмым (2.7) выходом БАУГД (2), вторым (6.2) и первым (6.1) выходами БН (6), с шестым (1.6) и пятым (1.5) выходами БАУР (1), а восьмой (2.8) выход БАУГД (2), седьмой (1.7), восьмой (1.8) и девятый (1.9) выходы БАУР (1) соединены соответственно со вторым (5.2) входом БУГД (5), первым (4.1) и вторым (4.2) входами БУК (4) и первым (5.1) входом БУГД (5), а первый выход (6.1) БН (6), кроме того, соединен с девятым (3.9) входом БИКС (3).
2. Устройство по п. 1, отличающееся тем, что БАУР (1) состоит из кнопки «Стоп» (Кстоп) (1.11), кнопки аварийного торможения с помощью руля (КАТР) (1.12), первого (1.13), второго (1.14) и третьего (1.15) элементов «ИЛИ», первого (1.16), второго (1.17) и третьего (1.18) триггеров, первого (1.19) и второго (1.20) инверторов, первого (1.21) и второго (1.22) элементов «И», задатчика левого борта руля (ЗЛБ) (1.23) и задатчика правого борта руля (ЗПБ) (1.24), при этом Кстоп (1.11) соединена с первым входом первого элемента «ИЛИ» (1.13), второй вход которого является первым входом (1.1) БАУР (1), а выход первого элемента «ИЛИ» (1.13) является пятым выходом (1.5) БАУР (1) и соединен с входом R первого триггера (1.16), вход S которого соединен с выходом КАТР (1.12), а выход первого триггера (1.16) является девятым (1.9), седьмым (1.7) и шестым (1.6) выходами БАУР (1), четвертый вход (1.4) БАУР (1) соединен с первыми входами первого (1.21) и второго (1.22) элементов «И» БАУР (1), вторые входы которых соединены соответственно через первый (1.19) и второй (1.20) инверторы со вторым входом (1.2) БАУР (1), а выход первого элемента «И» (1.21) соединен с входом S второго триггера (1.17), вход R которого соединен с выходом третьего триггера (1.18), вход S которого подключен к выходу третьего элемента «ИЛИ» (1.15), первый и второй входы которого являются соответственно вторым (1.2) и третьим (1.3) входами БАУР (1), выходы второго (1.17) и третьего (1.18) триггеров подключены соответственно к входам ЗЛБ (1.23) и ЗПБ (1.24), выходы которых подключены соответственно к первому и второму входам второго элемента «ИЛИ» (1.14), выход которого является восьмым выходом (1.8) БАУР (1), а выход третьего триггера (1.18), кроме того, подключен к входу R второго триггера (1.17).
3. Устройство по п. 1, отличающееся тем, что БАУГД (2) состоит из датчика остановки главного двигателя (Дстоп) (2.11), первого (2.12), второго (2.13), третьего (2.14) и четвертого (2.15) триггеров, задатчиков: среднего хода (ЗСХ) (2.16), малого хода (ЗМХ) (2.17), самого малого хода (ЗСМХ) (2.18), полного хода назад (ЗПХН) (2.19) и элемента «ИЛИ» (2.20), выход Дстоп (2.11) является девятым (2.9) и седьмым (2.7) выходами БАУГД (2), а шестой вход (2.6) БАУГД (2) соединен с входом S первого триггера (2.12), третий вход (2.3) БАУГД (2) соединен с входом R первого триггера (2.12) и со входом S второго триггера (2.13), второй (2.2) вход БАУГД (2) соединен со входом R второго триггера (2.13) и со входом S третьего триггера (2.14), первый (2.1) вход БАУГД (2) соединен со входом R третьего триггера (2.14) и со входом S четвертого триггера (2.15), вход R которого является четвертым входом (2.4) БАУГД (2), а выходы первого (2.12), второго (2.13), третьего (2.14) и четвертого (2.15) триггеров соединены со входами соответственно ЗСХ (2.16), ЗМХ (2.17), ЗСМХ (2.18) и ЗПХН (2.19), выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами элемента «ИЛИ» (2.20), пятый вход которого является пятым входом (2.5) БАУГД (2), а выход элемента «ИЛИ» (2.20) является восьмым выходом (2.8) БАУГД (2).
4. Устройство по п. 1, отличающееся тем, что БИКС (3) состоит из датчика скорости судна, равной нулю, (ДV=0) (3.11), первого (3.12) и второго (3.17) триггеров, элемента «ИЛИ» (3.16), счетчика пересечения первоначального курса (Сч) (3.18), элемента «И» (3.19), датчика первоначального курса (ДПК) (3.13), датчика отклонения судна от первоначального курса на левый борт на 20 градусов (ДОЛБ20) (3.14) и датчика отклонения судна от первоначального курса на левый борт на 40 градусов (ДОЛБ40) (3.15), при этом вход датчика скорости судна, равной нулю, ДV=0 (3.11) является восьмым входом (3.8) БИКС (3), а выход датчика ДV=0 (3.11) является четвертым выходом (3.4) БИКС (3) и соединен со входом S первого триггера (3.12), вход R которого является седьмым (3.7) входом БИКС (3), а выход первого триггера (3.12) является пятым (3.5) выходом БИКС (3), девятый (3.9) вход БИКС (3) соединен с первым входом ДПК (3.13) и со входами (ДОЛБ20) (3.14), (ДОЛБ40) (3.15), выходы которых являются соответственно шестым (3.6) и третьим (3.3) выходами БИКС (3), а второй вход ДПК (3.13) является десятым (3.10) входом БИКС (3) и соединен с первым входом элемента «ИЛИ» (3.16), второй вход которого подключен к выходу элемента «И» (3.19), а выход элемента «ИЛИ» (3.16) является двенадцатым (3.12) выходом БИКС (3), выход (ДПК) (3.13) соединен с входом S второго триггера (3.17), вход R которого является одиннадцатым (3.11) входом БИКС (3), выход второго триггера (3.17) соединен со входом Сч (3.18) и первым входом элемента «И» (3.19), второй вход которого соединен с первым выходом Сч (3.18), который является вторым (3.2) выходом БИКС (3), а второй выход Сч (3.18) является первым выходом (3.1) БИКС (3).
5. Устройство по п. 1, отличающееся тем, что БУГД (5) состоит из задатчика режимов работы главного двигателя (ЗГД) (5.13), элемента сравнения (ЭС) (5.14), инвертора (5.11), логического элемента «И» (5.12), усилителя (У) (5.16), исполнительного механизма (ИМ) (5.17), сектора газа (СГ) (5.18) и датчика обратной связи (ДОС) (5.15), при этом первый вход (5.1) БУГД (5) через инвертор (5.11) соединен с первым входом логического элемента «И» (5.12), второй вход которого соединен с ЗГД (5.13), а выход логического элемента «И» (5.12) соединен с первым входом ЭС (5.14), второй и третий входы которого являются соответственно вторым входом (5.2) БУГД (5) и выходом ДОС (5.15), а выход ЭС (5.14) соединен через усилитель (У) (5.16) с ИМ (5.17), механически связанным с сектором газа главного двигателя (СГ) (5.18) и датчиком обратной связи (ДОС) (5.15).
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| Способ уменьшения стартовой высоты стратостата | 1950 |
|
SU137014A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |

