Изобретение относится к области машиностроения, а именно к средствам преодоления заграждений и препятствий, в том числе лесных и каменных завалов.
Известно рабочее орудие [1], снабженное опорно-поворотным соединением, позволяющим использовать различный землеройный инструмент. Недостатком данной конструкции является то, что ее основным предназначением является производство экскаваторных работ с помощью ковша. Кроме того, известное орудие при оснащении его захватом не позволяет выполнять экскаваторные работы без смены инструмента.
Известна инженерная машина разграждения [2], выбранная в качестве прототипа, содержащая в частности базовое шасси, на котором смонтированы универсальный бульдозерный рабочий орган и поворотная платформа с телескопической стрелой, снабженная захватом в виде двух шарнирно соединенных челюстей, одна в виде бульдозерного отвала, другая – в виде рамы с жестко закрепленными на ней зубьями [2]. Однако такая конструкция имеет ограниченный функционал, в частности, не позволяет производить экскаваторные работы, потребность в которых может возникать при разборке завалов и других видах инженерных работ.
Задачей, на решение которой направлено настоящее изобретение, является создание конструкции инженерной системы машины разграждения, позволяющей производить не только разборку лесных и каменных завалов, но и осуществлять экскаваторные работы, что расширит функциональные возможности.
Указанная задача решается тем, что инженерная система машины разграждения, содержащая базовое шасси, на котором смонтирована поворотная платформа с телескопической стрелой, снабжена универсальным рабочим органом, выполненным в виде манипулятора с двухчелюстным ковшом-захватом, при этом манипулятор состоит из гидроцилиндра подъема, коромысла, штанги, корпуса с кронштейном, двумя лапами и коллектором, двух гидроцилиндров поворота с рейками и гидроцилиндра операций с зубчатым венцом. Ковш-захват состоит из двух челюстей с рычагами, двух серег, петли. Челюсти снабжены с одной стороны двумя ножами, а также с обоих сторон несколькими копающими зубьями. Гидроцилиндр подъема шарнирно соединен с телескопической стрелой и коромыслом, которое шарнирно соединено с телескопической стрелой и штангой, которая шарнирно соединена с корпусом, который шарнирно соединен с телескопической стрелой, его кронштейн шарнирно соединен с рычагами одной челюсти, а лапы шарнирно соединены с серьгами, которые шарнирно соединены с рычагами второй челюсти. Середины рычагов шарнирно соединены друг с другом, петлей и гидроцилиндром операций, чей зубчатый венец соединен с рейками двух гидроцилиндров поворота, закрепленных в корпусе. Кроме того, на телескопической стреле размещен цилиндрический элемент для фиксации универсального рабочего органа в транспортном положении.
Заявленные технические признаки существенны, так как они влияют на достигаемый технический результат.
При изучении других известных технических решений в данной области техники признаки, отличающие заявленное техническое решение не были выявлены. Это позволяет сделать вывод о том, что заявленное техническое решение обладает новизной и не следует явным образом из существующего уровня техники.
Предлагаемое техническое решение может быть применено при производстве инженерных машин разграждения.
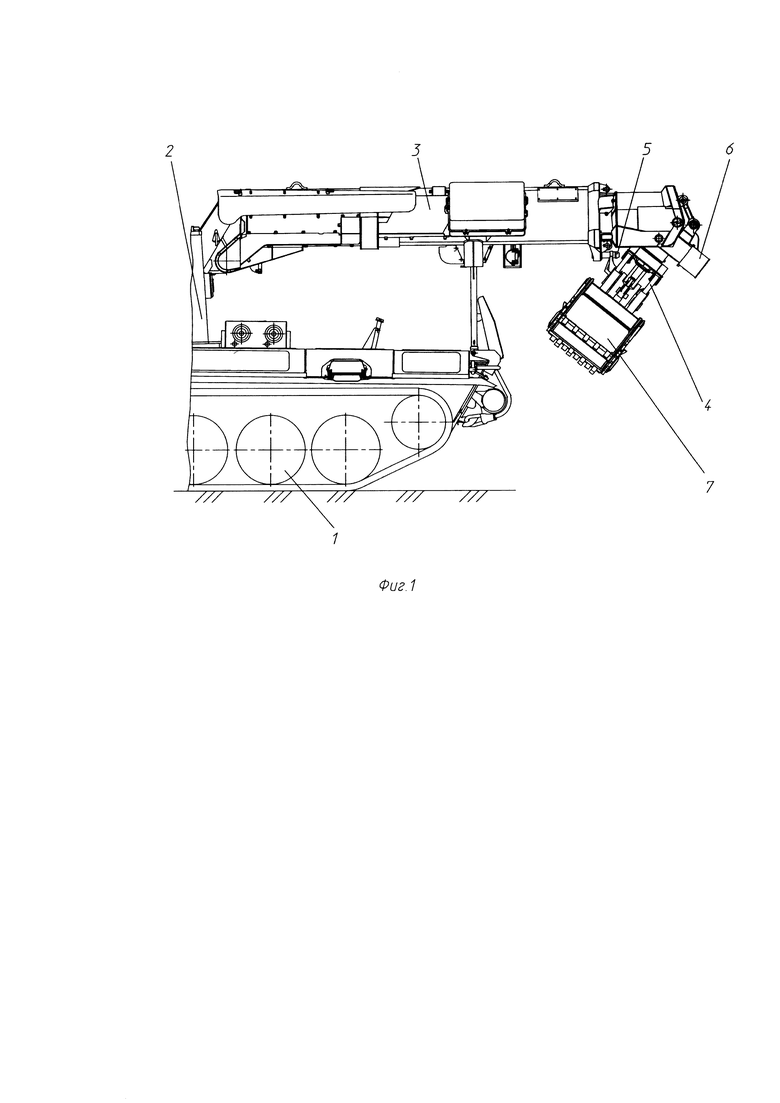
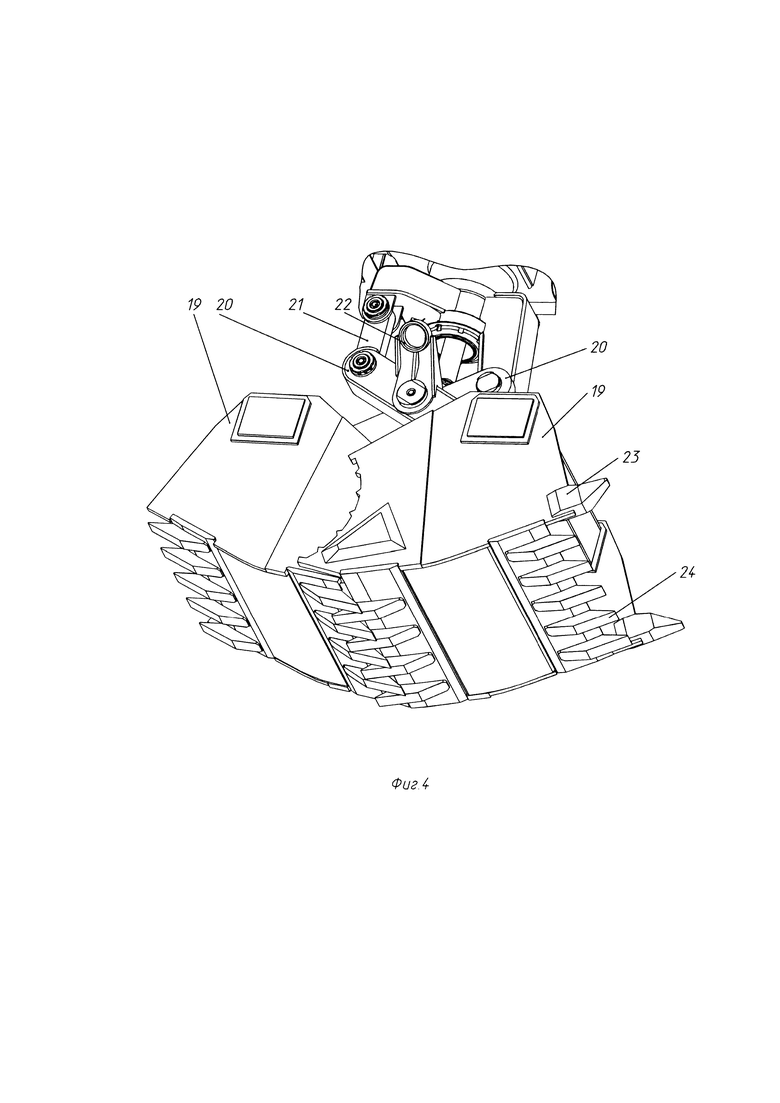
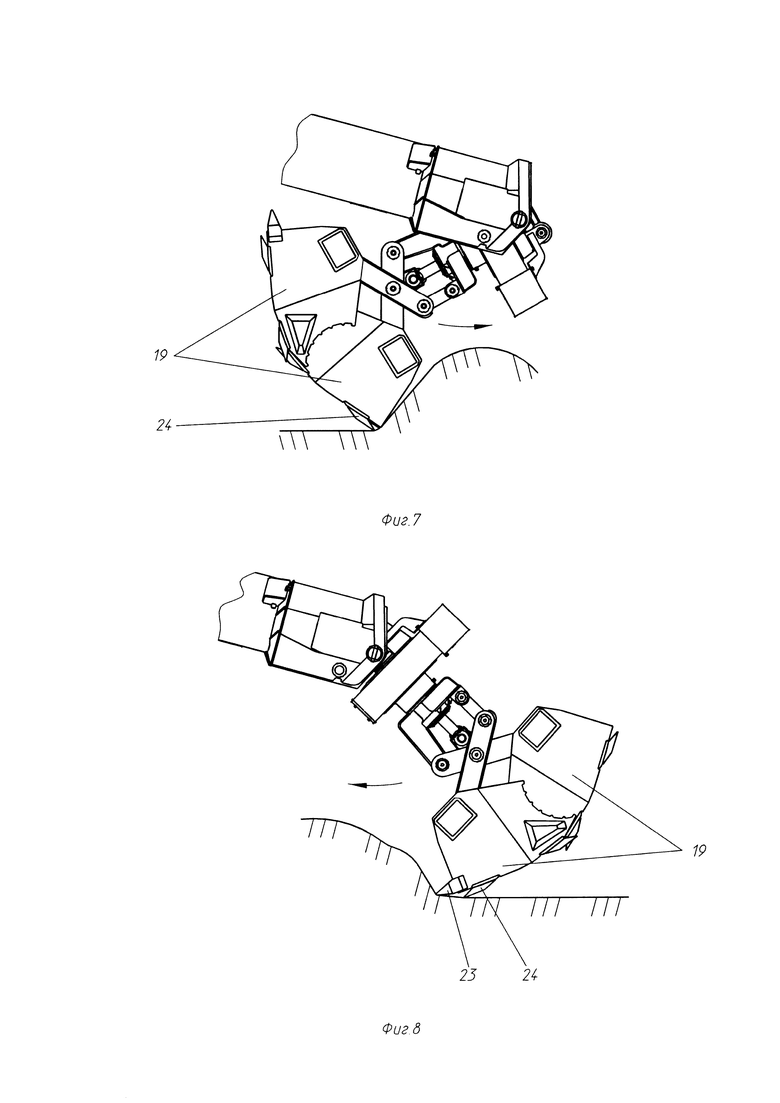
Сущность изобретения поясняется чертежами, где: на фиг.1 изображен общий вид инженерной системы машины разграждения с универсальным рабочим органом; на фиг.2 и 3 изображена конструкция манипулятора; на фиг.4 изображена конструкция двухчелюстного ковша-захвата; на фиг.5 и 6 изображено использование универсального рабочего органа при разборе завалов; на фиг.7 изображено использование универсального рабочего органа при копании методом «прямая лопата»; на фиг.8 изображено использование универсального рабочего органа при копании методом «обратная лопата»; на фиг.9 изображено использование универсального рабочего органа при копании методом «грейфер»; на фиг.10 изображено использование универсального рабочего органа при копании методом «рыхление».
Инженерная система машины разграждения содержит базовое шасси 1, поворотную платформу 2 с телескопической стрелой 3 и универсальным рабочим органом 4, а также цилиндрическим элементом 5 для фиксации универсального рабочего органа 4 в транспортном положении. Универсальный рабочий орган 4 состоит из манипулятора 6 и двухчелюстного ковша-захвата 7.
Манипулятор 6 состоит из гидроцилиндра 8 подъема, коромысла 9, штанги 10, корпуса 11 с кронштейном 12, двумя лапами 13 и коллектором 14, двух гидроцилиндров 15 поворота с рейками 16 и гидроцилиндра 17 операций с зубчатым венцом 18.
Ковш-захват 7 состоит из двух челюстей 19 с рычагами 20, двух серег 21, петли 22. Челюсти 19 снабжены с одной стороны двумя ножами 23, а также с обоих сторон несколькими копающими зубьями 24.
Гидроцилиндр 3 подъема шарнирно соединен с телескопической стрелой 3 и коромыслом 9, которое шарнирно соединено с телескопической стрелой 3 и штангой 10, которая шарнирно соединена с корпусом 11, который шарнирно соединен с телескопической стрелой 3, его кронштейн 12 шарнирно соединен с рычагами 20 одной челюсти 19, а лапы 13 шарнирно соединены с серьгами 21, которые шарнирно соединены с рычагами 20 второй челюсти 19. Середины рычагов 20 шарнирно соединены друг с другом, петлей 22 и гидроцилиндром 17 операций, чей зубчатый венец 18 соединен с рейками 16 двух гидроцилиндров 15 поворота, закрепленных в корпусе 11.
Работа универсального рабочего органа.
Наклон универсального рабочего органа 4 осуществляется при подаче рабочей жидкости в гидроцилиндр 8 подъема, который воздействуя на коромысло 9 и штангу 10 наклоняет корпус 11 вместе с ковшом-захватом 7.
Поворот универсального рабочего органа 4 осуществляется при подаче рабочей жидкости в гидроцилиндры 15 поворота, которые посредством реек 16 воздействуют на зубчатый венец 18 гидроцилиндра 17 операций, рейки 16 начинают обкатываться по зубчатому венцу 18, в результате чего корпус 11 с гидроцилиндрами 15 поворота поворачивается вместе с ковшом-захватом 7.
Раскрытие и закрытие челюстей 18 осуществляется при подаче рабочей жидкости через коллектор 14 в гидроцилиндр 17 операций, который воздействует на рычаги 20, вследствие чего они проворачиваются относительно кронштейна 12 и происходит раскрытие или закрытие челюстей 19, при этом кинематика движения челюстей 19 ограничивается серьгами 21, соединяющими лапы 13 и рычаги 20.
По окончании работы производится втягивание телескопической стрелы 3, при этом петля 22 надевается на цилиндрический элемент 5, что обеспечивает транспортное положение универсального рабочего органа 4, гарантирующее его надежную фиксацию при передвижении инженерной машины разграждения.
Работа инженерной системы машины разграждения.
Вышеописанная конструкция универсального рабочего органа обеспечивает выполнение инженерной машиной разграждения как разборки лесных и каменных завалов (фиг.5 и 6), так и экскаваторных работ (фиг. 7-10). При этом наличие двух ножей 23 позволяет легче внедряться в грунт и выполнять копание методом «рыхление», а расположение копающих зубьев 24 с обоих сторон челюстей 19 обеспечивает копание методами «грейфер», «прямая лопата» и «обратная лопата».
Таким образом, при осуществлении «Инженерной системы машины разграждения» будет достигнут, по мнению заявителя, технический результат, а именно: создание конструкции инженерной системы машины разграждения, позволяющей производить не только разборку лесных и каменных завалов, но и осуществлять экскаваторные работы, что расширит функциональные возможности; при этом само техническое решение обладает новизной и достаточным изобретательским уровнем.
Источники информации
1. Юрген _уле (DE). Рабочее орудие. Патент РФ 2046885. Приоритет от 13.11.1991 г. МПК E02F 3/28, E02F 9/14. Патентообладатель автор. Опубл. 27.10.1995 г. Патент перешел в общественное достояние.
2. Кондратович А.А. и др. Инженерная машина разграждения. Патент РФ 2072088. Приоритет от 18.06.1992г. МПК F41H 13/00. Патентообладатель в/ч 12093. Опубл.20.01.1997г. Перешел в общественное достояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНАЯ МАШИНА РАЗГРАЖДЕНИЯ | 1992 |
|
RU2072088C1 |
| ИНЖЕНЕРНАЯ МАШИНА РАЗГРАЖДЕНИЯ | 1994 |
|
RU2079094C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| УСТРОЙСТВО ДЛЯ СЦЕПКИ ИНЖЕНЕРНОЙ МАШИНЫ РАЗГРАЖДЕНИЯ С БУКСИРУЕМЫМ ОБЪЕКТОМ | 1995 |
|
RU2083381C1 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| Рабочий орган землеройной машины | 1990 |
|
SU1715995A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2002 |
|
RU2233948C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Рабочее оборудование гидравлического экскаватора | 2015 |
|
RU2612183C1 |




Изобретение относится к области машиностроения, а именно к инженерным машинам разграждения. Инженерная система машины разграждения содержит базовое шасси, на котором смонтирована поворотная платформа с телескопической стрелой, которая снабжена универсальным рабочим органом, выполненным в виде манипулятора с двухчелюстным ковшом-захватом. Манипулятор состоит из гидроцилиндра подъема, коромысла, штанги, корпуса с кронштейном, двумя лапами и коллектором, двух гидроцилиндров поворота с рейками и гидроцилиндра операций с зубчатым венцом. Ковш-захват состоит из двух челюстей с рычагами, двух серег, петли, а челюсти снабжены с одной стороны двумя ножами и с обеих сторон несколькими копающими зубьями. Гидроцилиндр подъема шарнирно соединен с телескопической стрелой и коромыслом, шарнирно соединенным с телескопической стрелой и штангой, которая шарнирно соединена с корпусом. На телескопической стреле размещен цилиндрический элемент для фиксации универсального рабочего органа в транспортном положении. Достигается расширение функциональных возможностей стрелового рабочего органа. 10 ил.
Инженерная система машины разграждения, содержащая базовое шасси, на котором смонтирована поворотная платформа с телескопической стрелой, отличающаяся тем, что телескопическая стрела снабжена универсальным рабочим органом, выполненным в виде манипулятора с двухчелюстным ковшом-захватом,
при этом манипулятор состоит из гидроцилиндра подъема, коромысла, штанги, корпуса с кронштейном, двумя лапами и коллектором, двух гидроцилиндров поворота с рейками и гидроцилиндра операций с зубчатым венцом;
ковш-захват состоит из двух челюстей с рычагами, двух серег, петли, а челюсти снабжены с одной стороны двумя ножами и с обеих сторон несколькими копающими зубьями, причем гидроцилиндр подъема шарнирно соединен с телескопической стрелой и коромыслом, шарнирно соединенным с телескопической стрелой и штангой, которая шарнирно соединена с корпусом, а упомянутый корпус шарнирно соединен с телескопической стрелой,
при этом кронштейн корпуса шарнирно соединен с рычагами одной из челюстей, лапы шарнирно соединены с серьгами, шарнирно соединенными с рычагами второй челюсти, а середины рычагов шарнирно соединены друг с другом, петлей и гидроцилиндром операций, чей зубчатый венец соединен с рейками двух гидроцилиндров поворота, закрепленных в корпусе,
кроме того, на телескопической стреле размещен цилиндрический элемент для фиксации универсального рабочего органа в транспортном положении.
| ЭЛЕКТРОПРИВОД постоянного ТОКА | 0 |
|
SU184330A1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| СПОСОБ ПРОИЗВОДСТВА МОРОЖЕНОГО "БЕЛОСНЕЖКА" (ВАРИАНТЫ) | 2014 |
|
RU2545638C1 |
| JP 2013120022 A, 17.06.2013 | |||
| КОРРОЗИОННОСТОЙКОЕ КОМПОЗИЦИОННОЕ ПОЛИМЕРМАТРИЧНОЕ ПОРОШКОВОЕ ПОКРЫТИЕ НА ОСНОВЕ ПОЛИСУЛЬФОНА | 2012 |
|
RU2525906C2 |

