Изобретение относится к транспортным средствам с движителями иными, чем обычные колеса или гусеницы, а именно к манипуляторам, смонтированным на тележках, и может применяться в качестве автономных мобильных транспортных средств для транспортирования грузов по территории промышленных площадок или складов.
Из уровня техники известна тележка (RU 81146 U1, МПК В62В 3/02, опубл. 10.03.2009), представляющая собой безрельсовое транспортное средство рамы, установленных на ней неповоротных ходовых колес, поворотного катка, с закрепленным на нем водилом и промежуточного элемента, в виде двух дисков со встречными скосами, установленных горизонтально друг над другом и взаимодействующих между собой.
Недостатком известного технического решения является отсутствие в конструкции тележки механического привода и элементов автоматики, что требует применения мускульной силы для перемещения грузов.
Наиболее близким техническим решением, выбранным в качестве прототипа признана шароколесная тележка (RU 145276 U1, МПК B62D 57/028, В60В 19/14, опубл. 20.09.2014), содержащая держатель и роликовые опоры, выполненные в виде попарно установленных и кинематически соединенных между собой шпинделей с роликами, дополнительно каждая из пар шпинделей снабжена отдельным держателем и приводным двигателем, установленным в гнезде на держателе и кинематически связанным со шпинделями, а держатели со шпинделями установлены на платформе таким образом, что оси шпинделей наклонены к опорной поверхности.
Недостатком известной тележки является ее низкая грузоподъемность, связанная с использованием в узле крепления роликовых опор вилок, что также снижает надежность конструкции. Кроме того, тележка не содержит грузовой платформы, что затрудняет ее использование при закреплении и транспортировке грузов.
Технической задачей, на решение которой направлено заявленное изобретение, является создание конструкции маневренной роботизированной грузовой тележки, снабженной грузовой платформой с изменяемой высотой.
Указанная задача решена тем, что омниколесная роботизированная грузовая тележка содержит трубчатую раму, снизу которой закреплены передняя и задняя плиты, снабженные колесными модулями. Отличает тележку от известных аналогов то, что, каждый из колесных модулей включает в себя П-образный кронштейн, снабженный подшипниковыми опорами, с установленными в них на валу омниколесом. При этом вал связан механической передачей с валом электродвигателя, закрепленного на плите. На раме установлена многофункциональная трансформируемая грузовая платформа, основание которой выполнено состоящим из двух рам, каждая из которых включает две опорные стойки, соединенные между собой верхней и нижней связующими балками. При этом опорные стойки рам соединены между собой фланцевым соединением с образованием X-образной опоры. Верхние части стоек шарнирно соединены с грузовой платформой, а нижние - с трубчатой рамой. Дополнительно основание снабжено винтовым подъемным механизмом с ходовым винтом, при этом гайка подъемного механизма выполнена заодно с U-образным кронштейном, шарнирно закрепленным на нижней связующей балке первой рамы, а шарнирный наконечник винта упомянутого механизма шарнирно закреплен на верхней балке второй рамы. Гайка выполнена приводной, связанной механической передачей с валом электродвигателя, закрепленного на U-образном кронштейне. Электродвигатели тележки снабжены энкодерами и подключены к силовым выходам блока управления, выполненного на основе микроконтроллера и закрепленного на передней плите.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков устройства, является повышение маневренности тележки за счет применения в конструкции колесных модулей омниколес, повышение тяговой способности за счет применения в каждом из колесных модулей электродвигателя, снабженного энкодером, а также повышение ее грузоподъемности, за счет применения в конструкции трансформируемой грузовой платформы подъемного механизма. Дополнительным техническим результатом от применения подъемного механизма является повышение удобства обслуживания с помощью тележки промышленного оборудования, имеющего различную высоту рабочей зоны.
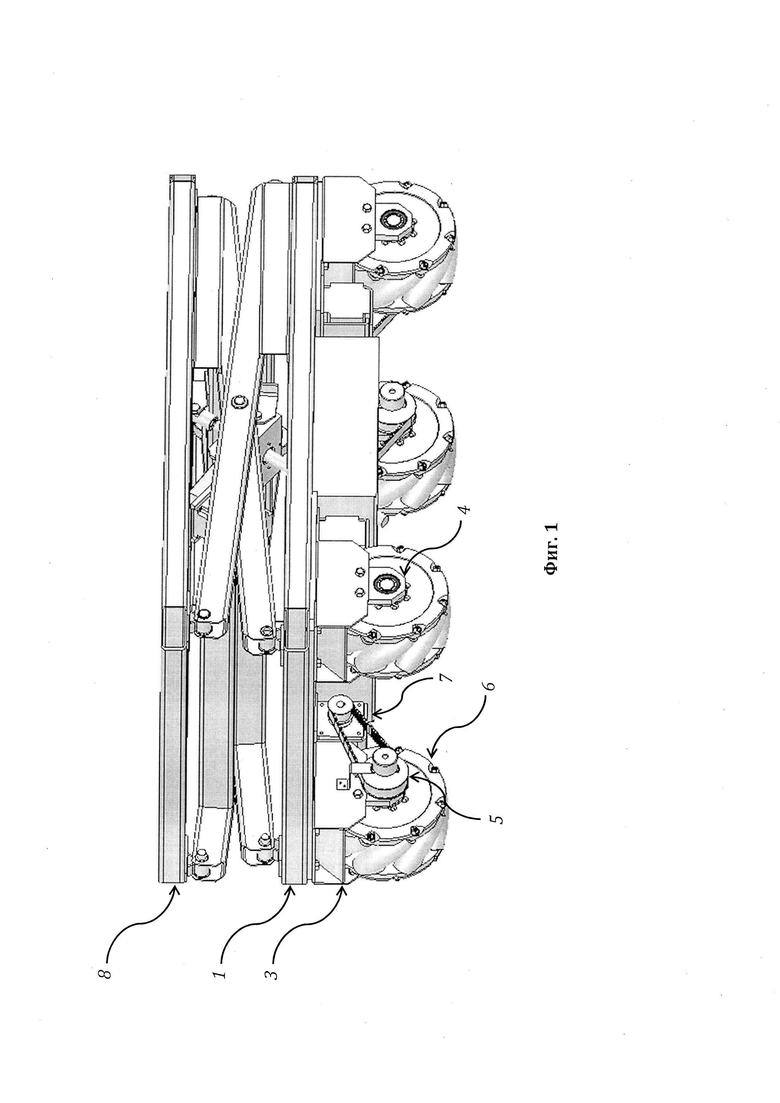
Изобретение поясняется чертежами, где на фиг. 1 приведен вид грузовой тележки сбоку; на фиг. 2 приведен вид грузовой тележки в изометрической проекции с опущенной грузовой платформой; на фиг. 3 приведен вид грузовой тележки в изометрической проекции с поднятой грузовой платформой.
Омниколесная роботизированная грузовая тележка устроена следующим образом.
Ее основой является трубчатая рама 1, снизу которой закреплены передняя и задняя плиты 2, снабженные колесными модулями, каждый из которых включает в себя П-образный кронштейн 3, снабженный подшипниковыми опорами 4, с установленными в них на валу 5 омниколесом 6. При этом вал 5 связан механической передачей с валом электродвигателя 7, закрепленного на плите. На раме 1 установлена многофункциональная трансформируемая грузовая платформа 8, основание которой выполнено состоящим из двух рам 9 и 10, каждая из которых включает две опорные стойки, соединенные между собой верхней 11 и нижней 12 связующими балками. При этом опорные стойки рам соединены между собой фланцевым соединением с образованием Х-образной опоры. Верхние части стоек шарнирно соединены с грузовой платформой 9, а нижние - с трубчатой рамой 1. Дополнительно основание снабжено винтовым подъемным механизмом с ходовым винтом, при этом гайка 13 подъемного механизма выполнена заодно с U-образным кронштейном 14, шарнирно закрепленным на нижней связующей балке первой рамы 9, а шарнирный наконечник винта 15 упомянутого механизма шарнирно закреплен на верхней балке второй рамы 10. Гайка 13 выполнена приводной, связанной механической передачей с валом электродвигателя 16, закрепленного на U-образном кронштейне 17. Электродвигатели 7 и 16 тележки снабжены энкодерами и подключены к силовым выходам блока управления 18, выполненного на основе микроконтроллера и закрепленного на передней плите.
В качестве механической передачи может быть применена ременная, цепная или зубчатая передача. Силовые выходы блока управления могут быть выполнены на основе тиристорных или транзисторных ключей, а в качестве микроконтроллера может быть применена микросхема из семейства тридцатидвухразрядных микроконтроллеров STM32 с высокопроизводительным микропроцессорным ARM-ядром. При этом микропроцессорное ядро соединено посредством общей шины с FLASH-памятью программ, SRAM-памятью данных, многоканальным двенадцатиразрядным аналого-цифровым преобразователем, энергонезависимой электрически перепрограммируемой памятью EEPROM, универсальным восьмиразрядными двунаправленными портами ввода-вывода и Ethernet-контроллером. К одному из каналов аналого-цифрового преобразователя через операционный усилитель может быть подключен тензометрический датчик, совмещенный с подъемным механизмом, для измерения нагружения грузовой платформы, универсальные порты ввода-вывода могут быть подключены к силовым выходам блока управления, а к Ethernet-контроллеру может быть подключен WiFi-модуль для обмена данными между блоком управления и удаленным пультом оператора или локальной сетью предприятия.
Омниколесную роботизированную грузовую тележку используют следующим образом.
Первоначально активируют блок управления тележки и выполняют тестирование ее агрегатов, проверяя работоспособность электродвигателей и правильную работу подъемного механизма. В случае отсутствия неисправностей приступают к работе.
При перемещении грузов по производственной площадке тележкой может управлять рядом идущий оператор, подавая команды с помощью беспроводного пульта управления. Управление может осуществляться также с помощью специализированного сервера локальной сети предприятия. К основным управляющим командам относятся следующие: «движение вперед», «движение назад», «поворот направо», «поворот налево», «движение влево», «движение вправо», «подъем грузовой платформы», «опускание грузовой платформы».
Принимая управляющие команды микроконтроллер блока управления на основе управляющей программы, хранящейся во FLASH-памяти программ, реализует алгоритмы управления электродвигателями, обеспечивая независимое вращение омниколес и гайки подъемного механизма. При этом если в качестве электродвигателей применяются шаговые двигатели, то для управления электродвигателями используют алгоритм «бегущая единица». В случае применения асинхронных двигателей или коллекторных двигателей постоянного тока целесообразно использовать алгоритмы с применением широтно-импульсной модуляции.
Таким образом, рассмотренная в настоящей заявке омниколесная роботизированная грузовая тележка, является высокотехнологичной машиной производственного назначения, которая может применяться для транспортировки различных грузов по территории промышленных площадок масштаба цеха машиностроительного предприятия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| ДВУХОСНАЯ ТЕЛЕЖКА СКОРОСТНОГО МНОГОФУНКЦИОНАЛЬНОГО ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2653908C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Тяговый привод рельсовой тележки | 1988 |
|
SU1792383A3 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |


Изобретение относится к области машиностроения, в частности к омниколесным роботизированным грузовым тележкам. Тележка содержит трубчатую раму, снизу которой закреплены передняя и задняя плиты, снабженные колесными модулями. Каждый из колесных модулей включает в себя П-образный кронштейн, снабженный подшипниковыми опорами, с установленными в них на валу омниколесом. Вал связан механической передачей с валом электродвигателя, закрепленного на плите. На раме установлена многофункциональная трансформируемая грузовая платформа, основание которой выполнено состоящим из двух рам и снабжено винтовым подъемным механизмом с ходовым винтом. Гайка подъемного механизма выполнена приводной, связанной механической передачей с валом электродвигателя. Электродвигатели тележки снабжены энкодерами и подключены к силовым выходам блока управления, выполненного на основе микроконтроллера и закрепленного на передней плите. Достигается повышение маневренности тележки. 6 з.п. ф-лы, 3 ил.
1. Омниколесная роботизированная грузовая тележка, содержащая трубчатую раму, снизу которой закреплены передняя и задняя плиты, снабженные колесными модулями, отличающаяся тем, что каждый из колесных модулей включает в себя П-образный кронштейн, снабженный подшипниковыми опорами, с установленными в них на валу омниколесом, при этом вал связан механической передачей с валом электродвигателя, закрепленного на плите; на раме установлена многофункциональная трансформируемая грузовая платформа, основание которой выполнено состоящим из двух рам, каждая из которых включает две опорные стойки, соединенные между собой верхней и нижней связующими балками, при этом опорные стойки рам соединены между собой фланцевым соединением с образованием Х-образной опоры; верхние части стоек шарнирно соединены с грузовой платформой, а нижние - с трубчатой рамой; дополнительно основание снабжено винтовым подъемным механизмом с ходовым винтом, при этом гайка подъемного механизма выполнена заодно с U-образным кронштейном, шарнирно закрепленным на нижней связующей балке первой рамы, а шарнирный наконечник винта упомянутого механизма шарнирно закреплен на верхней балке второй рамы; гайка выполнена приводной, связанной механической передачей с валом электродвигателя, закрепленного на U-образном кронштейне; электродвигатели тележки снабжены энкодерами и подключены к силовым выходам блока управления, выполненного на основе микроконтроллера и закрепленного на передней плите.
2. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что в качестве механической передачи применена ременная передача.
3. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что в качестве механической передачи применена цепная передача.
4. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что в качестве механической передачи применена зубчатая передача.
5. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что силовые выходы блока управления выполнены на основе тиристорных ключей.
6. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что силовые выходы блока управления выполнены на основе транзисторных ключей.
7. Омниколесная роботизированная грузовая тележка по п. 1, отличающаяся тем, что в качестве микроконтроллера может быть применена микросхема из семейства тридцатидвухразрядных микроконтроллеров STM32 с высокопроизводительным микропроцессорным ARM-ядром.
| Тележка складная для транспортировки в багажнике автомобиля | 2017 |
|
RU2647824C1 |
| ПОДЪЕМНИК | 1991 |
|
RU2006451C1 |
| US 6431319 B1, 13.08.2002. | |||

