Изобретение относится к области летательных аппаратов, а именно к конструкции вертолетов [B64C 27/04, B64C 27/08, B64C 27/10, B64C 27/50, B64C 27/52, B64C 27/54, B64C 39/04].
Синхрокоптер – вертолёт двухвинтовой поперечной схемы с большим перекрытием перекрещивающихся несущих винтов.
Из уровня техники известен АСИММЕТРИЧНЫЙ ДВУХОСНЫЙ ВЕРТОЛЕТ И СПОСОБ ЕГО ПОЛЕТА [CN108502156 (A),опубл.: 07.09.2018], отличающийся тем, что он включает в себя фюзеляж, первый выходной силовой вал и второй силовой выходной вал, первый силовой выходной вал и второй силовой выходной вал установлены в фюзеляже совместно, первый силовой выходной вал расположен вдоль вертикального направления корпуса, а второй силовой выходной вал расположен вдоль под определенным углом к вертикальной линии корпуса, а направления вращения первого силовой выходного вала и второго силового выходного вала противоположны, первый силовой выходной вал и второй силовой выходной вал вращаются синхронно, и вертолет также включает в себя два набора роторов, установленные во взаимодействии на первом силовом выходном валу и втором силовом выходном валу.
Наиболее близким по технической сущности является ВЕРТОЛЕТ [RU 2373113 C2, опубл.: 20.11.2009], задачами которого являются адаптация поперечной схемы вертолета для использования в качестве боевого, а именно для подвешивания вооружения на нижней поверхности крыла, повышение скорости и маневренности вертолета, повышение прочностных характеристик и боевой живучести крыла вертолета, которые решаются за счет того, что вертолет содержит шасси, крыло, двигатели, два несущих винта, расположенные согласно поперечной схеме, элементы подвески вооружения, расположенные на нижней поверхности крыла вертолета, систему управления вертолетом, средство синхронизации несущих винтов, двигатели с несущими винтами установлены на противоположных концах крыла, между двигателями установлено средство синхронизации несущих винтов, оси несущих винтов в продольной плоскости наклонены во внешнюю от плоскости симметрии вертолета сторону на угол β=3…6°, а их проекции на плоскость симметрии вертолета перпендикулярны к поверхности земли, при этом крыло выполнено подкрепленным с помощью силового набора, с большой строительной высотой и с полостью для размещения аппаратуры вертолета, а проекция перпендикуляра к строительной горизонтали крыла на плоскость симметрии вертолета образует угол γ=4…10° к вертикали; где с - высота профиля крыла; b - хорда профиля крыла, строительная горизонталь крыла - прямая, относительно которой построен профиль крыла, проходящая через хорду профиля крыла b.
Основной технической проблемой аналога и прототипа является их низкие максимальные горизонтальные скорости, обусловленные способом осуществления горизонтального перемещения только за счет изменения углов наклона винтов.
Задачей изобретения является устранение недостатков аналога и прототипа.
Техническим результатом изобретения является увеличение максимальной горизонтальной скорости синхрокоптера.
Указанный технический результат достигается за счет того, что синхрокоптер со складывающимися винтами, содержащий фюзеляж, шасси, крыло, двигатели, два несущих винта, расположенные согласно поперечной схеме на разных осях, соединенные синхровалом синхронизации с приводами двигателей, крылья, отличающийся тем, что винты выполнены в виде монолопастей с возможностью складывания их в ниши, выполненные в фюзеляже за приводами упомянутых винтов, приводы двигателей снабжены механизмами отключения синхровала с помощью управляемой муфты с возможностью приведение во вращение винтов от одного или двух двигателей или одновременного отключения винтов, синхровал соединен с приводами винтов через редукторы и синхромуфты, при этом синхромуфты выполнены с возможностью управляемого отключения приводов винтов от редукторов, приводы винтов снабжены механизмами доворота и фиксации с возможностью точного определения положения с помощью датчиков положения каждой из монолопастей винтов и точного доворачивания их по-отдельности отдельными электроприводами через передаточные механизмы, снабженные датчиками вращения до положения, когда монолопасти винтов становятся напротив ниш, после чего за счет выполнения приводов винтов складными их складывают в ниши.
В частности, двигатели выполнены в виде турбореактивных.
В частности, двигатели выполнены с управлением вектором тяги в одной или нескольких плоскостях.
В частности, передаточный механизм выполнен в виде диска с зубчатым венцом.
В частности, датчиком вращения выполнен с возможностью измерения мгновенной скорости и малых угловых долей привода винта.
В частности, датчик положения выполнен с возможностью определения положения привода винта и, соответственно, несущего винта.
Краткое описание чертежей.
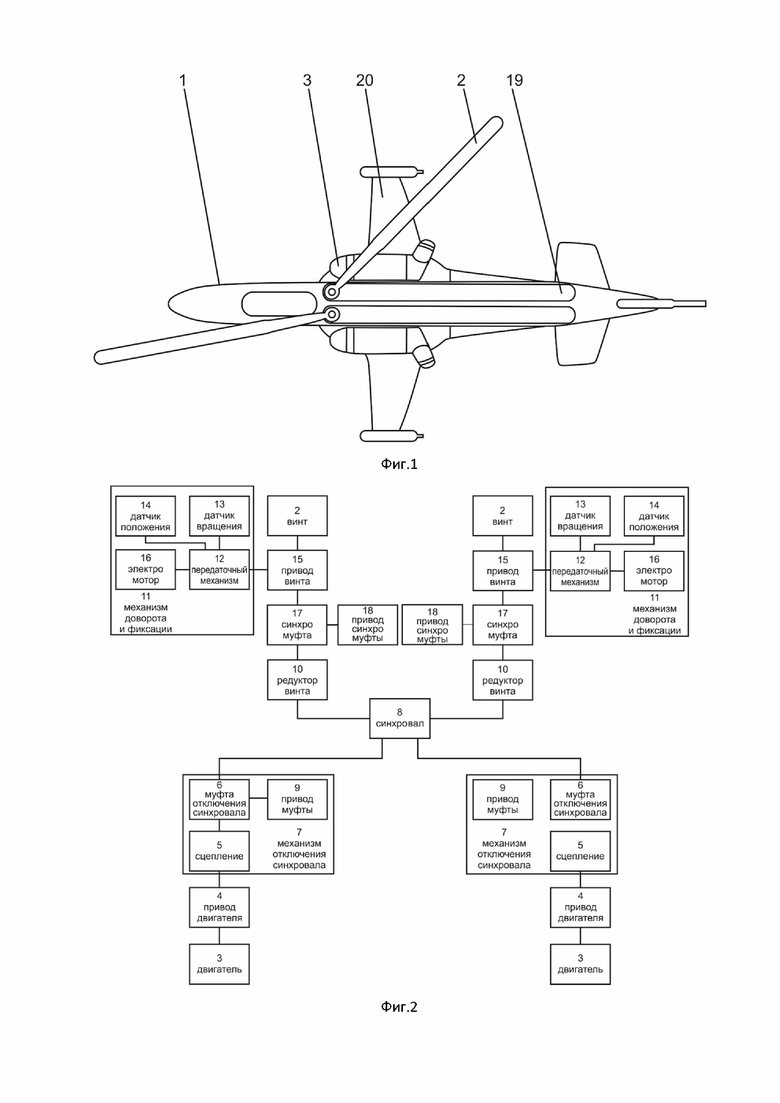
На фиг.1 показан схематично вид сверху синхрокоптера со складывающимися винтами.
На фиг.2 показана схема управления силовой установкой синхрокоптера для складывающихся винтов.
На фигурах обозначено: 1 – фюзеляж, 2 – винты, 3 – двигатели, 4 – приводы двигателей, 5 – сцепления, 6 – муфты отключения синхровала, 7 – механизм отключения синхровала, 8 – синхровал, 9 – привод муфты, 10 – редукторы винтов, 11 – механизмы доворота и фиксации, 12 – передаточные механизмы, 13 – датчики вращения, 14 – датчики положения, 15 – приводы винтов, 16 – электромоторы, 17 – синхромуфты, 18 – приводы синхромуфт, 19 – ниши, 20 – крылья.
Осуществление изобретения.
Заявляемое техническое решение представляет собой синхрокоптер со складывающимися винтами, содержащий фюзеляж 1 (см.Фиг.1), два несущих винта 2, выполненных в виде монолопастей, расположенных на фюзеляже по поперечной схеме на разных осях и силовую установку.
Фюзеляж 1 синхрокоптера выполнен одно или двухбалочным.
Двигатели 3 силовой установки смонтированы в верхней части фюзеляжа 1 симметрично относительно продольной оси синхрокоптера.
Двигатели 3 силовой установки выполнены в виде турбореактивных двигателей. Для обеспечения маневрирования синхрокоптера сопло двигателя 3 выполнено с управлением вектором тяги в одной или нескольких плоскостях.
Каждый привод двигателя 4 (см.Фиг.2) через сцепление 5 и муфту отключения синхровала 6 механизма отключения синхровала 7 соединен с синхровалом 8. Муфта отключения синхровала 6 приводится в работу приводом муфты 9, выполненной электромагнитной. Механизм отключения синхровала 7 выполнен с возможностью приведение во вращение в противоположных направлениях с перекрытием плоскостей вращения несущих винтов 2 от одного или двух двигателей 3 силовой установки или одновременного отключения несущих винтов 2.
Синхровал 8 соединяет собой редукторы винтов 10, выводной вал каждого из которых через синхромуфту 17 соединен с приводом винта 15. Синхромуфта 17 выполнена с возможностью соединения/рассоединения редуктора винта 10 с приводом винта 15. Управление каждой из синхромуфт 17 выполнено с помощью привода синхромуфты 18.
Привод винта 15 снабжен механизмом доворота и фиксации 11, входящий в зацепление с валом привода винта 15 передаточным механизмом 12, выполненным, например, в виде диска с зубчатым венцом. Передаточный механизм 12 снабжен датчиком вращения 13 и датчиком положения 14, выполненных с возможностью измерения мгновенной скорости и малых угловых долей привода винта 15 и определения положения привода винта 15 и, соответственно, несущего винта 2. Передаточный механизм 12 приводится в движение от электромотора 16 механизма доворота и фиксации 12.
Оси валов приводов винтов 15 роторов наклонены наружу под углом друг к другу, исключая таким образом возможность перехлёста винтов 2.
Валы приводов винтов 15 выполнены складными, например, телескопическими и снабжены синхромуфтами 17.
В одном из вариантов реализации синхрокоптера с толкающим винтом, силовая установка содержит двигатель, смонтированный в хвостовой части синхрокоптера (на фигурах не показан).
За приводами винтов 15 в фюзеляже выполнены продолговатые ниши 19 с возможностью складывания в них винтов 2.
По бортам синхрокоптера смонтированы крылья 20.
Синхрокоптер со складывающимися винтами работает следующим образом.
После запуска одного или двух двигателей 3 силовой установки привод двигателя 4 через сцепление 5 и муфту отключения синхровала 6 при включенной муфте отключения синхровала 6 передает вращение на синхровал 8.
Синхровал 8 через редукторы винта 10 сначала при включенной одной из синхромуфт 17 передает вращение на соединенный с ним привод винта 15, например, левый, смонтированный по левому борту фюзеляжа 1, который приводит во вращение по часовой стрелке винт 2 до момента, когда единственная лопасть упомянутого винта 2 не окажется направленной вперед. Положение винта 2 через привод винта 15 определяют с помощью датчика положения 14 механизма доворота и фиксации 11. В момент, когда лопасть винта 2 будет находиться впереди, замыкают синхромуфту 17 правого, размещенного по правому борту фюзеляжа, винта 2, который начинает вращение против часовой стрелки в противофазе левому винту 2. При вращении в горизонтальной плоскости винты 2 создают тягу, направленную вверх, выполняя роль подъёмной силы. Когда тяга винтов 2 будет больше веса синхрокоптера, он оторвется от земли и начнет вертикальный набор высоты.
После взлета и достижения максимальной горизонтальной скорости полета 300-350 км/ч отключают синхромуфты 17, тем самым отсоединяют, то есть прекращают передачу вращения от редукторов винта 10 приводам винтов 15. С помощью датчиков положений 14 механизмов доворота и фиксации 11 через передаточный механизм 12 и приводы винтов 15 определяют положения монолопастей каждого из винтов 2.
Далее, для винта 2, монолопасть которого находится ближе к нише 19, включают электромотор 16 и через передаточный механизм 12, передавая вращение на привод винта 15 доворачивают монолопасть этого винта 2 до положения, когда она становится напротив ниши 19. Далее отключают механизм доворота и фиксации 11 этого винта 2 и за счет выполнения привода винта 15 складным опускают винт 2 в нишу 19. Аналогичным образом с помощью механизма доворота и фиксации 11 помещают второй винт 2 в нишу 19.
Дальнейшее горизонтальное движение вертолета осуществляют за счет турбореактивных двигателей 2. Перед заходом на посадку поднимают винты 2 из ниш в последовательности, обратной их складыванию, описанной выше.
Технический результат изобретения - увеличение максимальной горизонтальной скорости синхрокоптера достигается за счет того, что при наборе высоты путем создания подъемной силы винтами 2, выполненными в виде монолопастей, расположенных на фюзеляже 1 по поперечной схеме на разных осях и приводимыми во вращение приводами двигателей 3, дальнейшее горизонтальное перемещение синхрокоптера осуществляют за счет упомянутых двигателей 3, выполненных турбореактивными с управлением вектором тяги в одной или нескольких плоскостях, а винты 2 складывают в ниши 19, выполненные вдоль фюзеляжа 1 синхрокоптера за приводами винтов 15, при этом для их складывания прекращают передачу вращательного движения от приводов двигателей 4 на синхровал 8 с помощью управляемых муфт отключения синхровала 6, которые расцепляют сцепление 5 и с помощью механизма доворота и фиксации 11 определяют положение каждой из монолопастей винтов 2 и доворачивают их по-отдельности до нужного положения, когда они становятся напротив ниш 19, после чего за счет выполнения приводов винтов 15 складными их складывают в ниши 19. Убранные в ниши винты 2 не создают аэродинамическое сопротивление, препятствующее перемещению синхрокоптера в горизонтальном направлении, что позволяет увеличить скорость синхрокоптера. Кроме того, такое решение позволяет повысить надежность винтов 2 аэродинамическому сопротивлению и синхрокоптера в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЫЖНО-КОЛЕСНОЕ ВЫДВИЖНОЕ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769263C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| СВЕРХЗВУКОВОЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2692742C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| Способ синхронизации и обеспечения симметрии тяги воздушных винтов силовой установки летательного аппарата и электрическая синхронизирующая трансмиссия для его реализации | 2016 |
|
RU2646696C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| МНОГОЦЕЛЕВОЙ ГИДРОКОНВЕРТОВИНТОПЛАН | 2007 |
|
RU2351506C2 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных вертолетов. Синхрокоптер со складывающимися винтами содержит фюзеляж, шасси, крыло, двигатели, два несущих винта поперечной схемы, соединенные валом синхронизации с двигателями, крылья. Винты выполнены в виде монолопастей с возможностью складывания их в ниши, выполненные в фюзеляже за приводами упомянутых винтов. Трансмиссия снабжена механизмами отключения синхронизирующего вала с помощью управляемой муфты с возможностью приведения во вращение винтов от одного или двух двигателей или одновременного отключения винтов. Приводы винтов снабжены механизмами доворота и фиксации с возможностью точного определения положения с помощью датчиков положения каждой из лопастей винтов и точного доворачивания их по отдельности отдельными электроприводами через передаточные механизмы, снабженные датчиками вращения до положения, когда монолопасти винтов становятся напротив ниш и винты складываются в ниши. Обеспечивается увеличение максимальной горизонтальной скорости синхрокоптера. 5 з.п. ф-лы, 2 ил.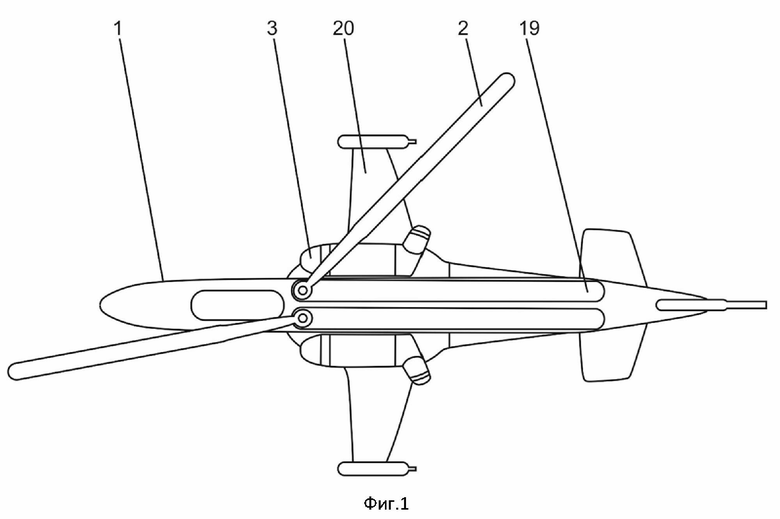
1. Синхрокоптер со складывающимися винтами, содержащий фюзеляж, шасси, крыло, двигатели, два несущих винта, расположенные согласно поперечной схеме на разных осях, соединенные синхровалом синхронизации с приводами двигателей, крылья, отличающийся тем, что винты выполнены в виде монолопастей с возможностью складывания их в ниши, выполненные в фюзеляже за приводами упомянутых винтов, приводы двигателей снабжены механизмами отключения синхровала с помощью управляемой муфты с возможностью приведения во вращение винтов от одного или двух двигателей или одновременного отключения винтов, синхровал соединен с приводами винтов через редукторы и синхромуфты, при этом синхромуфты выполнены с возможностью управляемого отключения приводов винтов от редукторов, приводы винтов снабжены механизмами доворота и фиксации с возможностью точного определения положения с помощью датчиков положения каждой из монолопастей винтов и точного доворачивания их по отдельности отдельными электроприводами через передаточные механизмы, снабженные датчиками вращения до положения, когда монолопасти винтов становятся напротив ниш, после чего за счет выполнения приводов винтов складными их складывают в ниши.
2. Синхрокоптер по п.1, отличающийся тем, что двигатели выполнены в виде турбореактивных.
3. Синхрокоптер по п.1, отличающийся тем, что двигатели выполнены с управлением вектором тяги в одной или нескольких плоскостях.
4. Синхрокоптер по п.1, отличающийся тем, что передаточный механизм выполнен в виде диска с зубчатым венцом.
5. Синхрокоптер по п.1, отличающийся тем, что датчик вращения выполнен с возможностью измерения мгновенной скорости и малых угловых долей привода винта.
6. Синхрокоптер по п.1, отличающийся тем, что датчик положения выполнен с возможностью определения положения привода винта и, соответственно, несущего винта.
| US 20180370625 A1, 27.12.2018 | |||
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| US 20180215464 A1, 02.08.2018 | |||
| US 20140084114 A1, 27.03.2014 | |||
| Летательный аппарат вертикального взлета и посадки | 2018 |
|
RU2700154C1 |

