Изобретение относится к области летательных аппаратов, конкретнее к области вертолетов и области летательных аппаратов с прямой передачей мощности между силовой установкой и несущим винтом.
Известен беспилотный вертолет, содержащий фюзеляж, кабину с комплексом бортового оборудования, оптико-электронную систему, радиопрозрачный обтекатель, установленный в носовой части фюзеляжа, главный редуктор, систему соосных несущих винтов, верхний несущий трехлопастный винт и нижний несущий трехлопастный винт, два автомата перекоса, турбовальный двигатель, левый и правый боковые кили, установленные на хвостовой балке под углом к продольной оси вертолета хвостиками вниз, топливный бак, толкающий трехлопастный винт, центральный горизонтальный киль, установленный на хвостовой балке, правое и левое крылья адаптивного размаха, закрепленные в верхней части фюзеляжа, при этом хвостовая балка имеет возможность вертикального изменения угла от продольной оси вертолета в полете, вместе с тем, левое и правое крылья адаптивного размаха содержат силовую панель, пропущенную через центральную часть фюзеляжа, правое и левое складывающиеся крылья, правую и левую законцовки крыльев, которые при опускании крыла адаптивного размаха выполняют роль полозкового шасси, одновременно с этим, правый и левый боковой кили имеют законцовки, выполняющие при посадке роль полозкового шасси, вместе с тем, законцовки левого и правого крыльев адаптивного размаха, правого и левого боковых килей выполнены из амортизационного материала для поглощения кинетической энергии посадочного удара при посадке [патент РФ №214067, B64C 27/22, B64C 39/02, B64C 25/66, опубл. 11.10.2022].
Недостатками аналога являются большая масса, обусловленная наличием двух автоматов перекоса, и невысокая надежность, обусловленная высокой степенью механизации хвостовой балки, правого и левого складывающихся крыльев.
Известен беспилотный вертолет, содержащий двигатель, соединенный трансмиссией с редуктором несущего винта, расположенные в самонесущем корпусе с носовой частью, часть корпуса которого выполнена в виде топливного бака. Двигатель отделен от редуктора противопожарной перегородкой с кольцевой щелью. Часть трансмиссии между двигателем и редуктором несущего винта выполнена в виде управляемой муфты сцепления и компенсационной муфты. На фланцах муфты сцепления напротив кольцевой щели со стороны двигателя установлен вентилятор, а на фланцах компенсационной муфты со стороны редуктора установлен тормоз несущего винта. В носовой части корпуса выполнен передний куполообразный отсек с закрываемой полостью полезной нагрузки. В носовой части корпуса снаружи переднего отсека напротив основных тепловыделяющих частей двигателя выполнены отверстия воздухозаборников, а в самом корпусе за тепловыделяющими частями двигателя и редуктора выполнены выпускные щели [патент №2636431, B64C 39/02, B64D 33/08, B64C 27/14, опубл. 23.11.2017].
Недостатками аналога являются невысокая надежность, обусловленная многокомпонентностью трансмиссии между двигателем и редуктором несущего винта, подверженной механическому износу, и большая масса, обусловленная наличием редуктора несущего винта.
Известен скоростной беспилотный вертолет, который содержит фюзеляж, включающий кабину с комплексом бортового оборудования, оптико-электронную систему, радиопрозрачный обтекатель, установленный в носовой части фюзеляжа, главный редуктор, систему соосных несущих винтов, верхний несущий трехлопастный винт и нижний несущий трехлопастный винт, два автомата перекоса, турбовальный двигатель, левый и правый боковые кили, установленные на хвостовой балке под углом к продольной оси вертолета хвостиками вниз, топливный бак и полозковое шасси, промежуточный редуктор, карданный вал, втулку толкающего винта, выполненную в виде трехлучевой звезды, к которой прикреплены три лопасти толкающего винта, толкающий трехлопастный винт, при этом промежуточный редуктор, содержащий входной вал, главный вал и выходной вал, входным валом с помощью муфты соединен с выходным валом турбовального двигателя, вместе с тем, главный вал промежуточного редуктора с помощью эластичной муфты соединен с валом главного редуктора, одновременно с этим, выходной вал промежуточного редуктора посредством муфты соединен с карданным валом, который обеспечивает взаимную кинематическую связь с втулкой толкающего винта [патент №211375, B64C 27/22, B64D 35/04, B64C 39/02, опубл. 02.06.2022].
Недостатками аналога являются большая масса, обусловленная наличием двух автоматов перекоса, а также невысокие надежность и эффективность, обусловленные наличием основного и промежуточного редукторов, в которых имеются значительные механические потери.
Известен беспилотный летательный аппарат вертикального взлета и посадки, который содержит корпус с несущим винтом, размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу и целевой груз. Груз свободно подвешен к корпусу в точке, лежащей на его вертикальной оси симметрии, и кинематически связан с аэродинамическими рулями посредством шарнирно-рычажных механизмов. Каждый из механизмов включает коромысло и тяги, соединяющие одно плечо коромысла с грузом или его подвесом, а другое - с соответствующим рулем. Тяга, сочлененная одним концом с грузом или его подвесом, соединена с коромыслом с возможностью передачи движения только в одном направлении [патент №2648491, B64C 17/04, опубл. 26.03.2018].
Недостатками аналога являются большая масса, обусловленная многокомпонентностью шарнирно-рычажных механизмов, а также невысокая надежность и ограниченная маневренность, обусловленные длинной кинематической связью груза с аэродинамическими рулями.
Задача и технический результат изобретения – уменьшение массогабаритных показателей малоразмерного беспилотного летательного аппарата вертолетного типа.
Поставленная задача решается, а технический результат достигается тем, что малоразмерный беспилотный летательный аппарат вертолетного типа содержит камеру, закрепленную на двух кронштейнах и электрически соединенную с контроллером и видеопередатчиком, два кронштейна, закрепленных на нижней пластине, контроллер, закрепленный на нижней пластине, нижнюю пластину, переднюю стойку, четыре основных стойки, верхнюю пластину, балку, соединенные между собой и образующие силовую раму, дальномер, соединенный с силовой рамой, электрически соединенный с контроллером, плату распределения, закрепленную на силовой раме и электрически соединенную с контроллером и аккумулятором, маршевый электродвигатель, закрепленный на силовой раме и электрически соединенный с первым регулятором оборотов, регуляторы оборотов, прикрепленные к силовой раме и электрически соединенные с аккумулятором и контроллером, компенсирующую муфту, соединенную с маршевым электродвигателем, аккумулятор, закрепленный на силовой раме и электрически соединенный с платой распределения и двумя регуляторами оборотов, хвостовик, закрепленный на силовой раме, хвостовой электродвигатель, закрепленный в хвостовике и электрически соединенный со вторым регулятором оборотов, задний винт, закрепленный на хвостовом электродвигателе, GPS–модуль, установленный на силовую раму и электрически соединенный с контроллером и платой распределения, приемник, закрепленный на силовой раме и электрически соединенный с контроллером и платой распределения, видеопередатчик, закрепленный на силовой раме и электрически соединенный с контроллером и платой распределения, три сервопривода, установленные на силовой раме и электрически соединенные с контроллером и платой распределения, три тяги, соединенные с тремя сервоприводами, тарелку автомата перекоса, соединенную с тремя тягами и валом, вал, закрепленный в силовой раме и соединенный с компенсирующей муфтой и тарелкой автомата перекоса, ротор, соединенный с валом, основной винт, соединенный с ротором.
Сущность устройства поясняется чертежом, на котором представлен малоразмерный летательный аппарат вертолетного типа в общем виде.
Малоразмерный беспилотный летательный аппарат вертолетного типа состоит из камеры 1, двух кронштейнов 2, контроллера 3, нижней пластины 4, передней стойки 5, четырех основных стоек 6, верхней пластины 7, балки 8, дальномера 9, платы распределения 10, маршевого электродвигателя 11, двух регуляторов оборотов 12, компенсирующей муфты 13, аккумулятора 14, хвостовика 15, хвостового электродвигателя 16, заднего винта 17, GPS -модуля 18, приемника 19, видеопередатчика 20, трех сервоприводов 21, трех тяг 22, тарелки автомата перекоса 23, вала 24, ротора 25, основного винта 26.
К нижней пластине 4 прикрепляется передняя стойка 5 с помощью резьбового соединения, посадки с натягом или клеевого соединения. Четыре основных стойки 6 прикрепляются к нижней пластине 4 с помощью резьбовых соединений, посадки с натягом или клеевого соединения. Балка 8 прикрепляется к верхней пластине 7 с помощью резьбового соединения, клеевого соединения или соединения с натягом. Верхняя пластина 7 прикрепляется к передней стойке 5 и четырем основным стойкам 6 с помощью клеевого соединения, резьбовых соединений или посадки с натягом. Нижняя пластина 4, передняя стойка 5, четыре основных стойки 6, верхняя пластина 7, балка 8 вместе образуют силовую раму малоразмерного беспилотного летательного аппарата вертолетного типа. Нижняя пластина 4, передняя стойка 5, четыре основных стойки 6, верхняя пластина 7 и балка 8 могут быть выполнены из металла, пластмассы или композитного материала.
Два кронштейна 2 прикрепляется к силовой раме с помощью резьбовых соединений, посадки с натягом или клеевого соединения. Камера 1 прикрепляется к двум кронштейнам 2 с помощью резьбовых соединений и электрически соединяется с контроллером 3 и видеопередатчиком 20. Дальномер 9 прикрепляется к силовой раме с помощью резьбового соединения или клеевого соединения и электрически соединяется с контроллером 3. Плата распределения 10 прикрепляется к силовой раме с помощью резьбового соединения и электрически соединяется с аккумулятором 14 и контроллером 3. Контроллер 3 закрепляется на силовой раме с помощью резьбового соединения и электрически соединяется с аккумулятором 14. Маршевый электродвигатель 11 прикрепляется к силовой раме при помощи резьбовых соединений, посадки с натягом или клеевого соединения. Маршевый электродвигатель 11 прикрепляется к компенсирующей муфте 13 с помощью резьбовых соединений, клеевого соединения или посадки с натягом и электрически присоединяется к первому регулятору оборотов 12. Два регулятора оборотов 12 закрепляются на силовой раме при помощи резьбовых соединения или клеевого соединения и электрически присоединяются к аккумулятору 14 и плате распределения 10. Компенсирующая муфта 13 прикрепляется к валу 24 с помощью резьбового соединения, клеевого соединения или посадки с натягом. Аккумулятор 14 закрепляется на силовой раме с помощью клеевого соединения или контактной ленты. Хвостовик 15 прикрепляется к силовой раме с помощью посадки с натягом или клеевого соединения. Хвостовик 15 может быть выполнен из композитного материала или пластмассы. Хвостовой электродвигатель 16 прикреплен к хвостовику 15 с помощью резьбовых соединений, клеевого соединения или посадки с натягом и электрически соединен с вторым регулятором оборотов 12. Первый и второй регуляторы оборотов 12 могут выполняться различной мощности и с различным максимальным током в зависимости от параметров маршевого электродвигателя и хвостового электродвигателя соответственно. Задний винт 17 прикреплен к хвостовому электродвигателю 16 с помощью посадки с натягом или резьбового соединения. GPS-модуль 18 прикреплен к силовой раме с помощью резьбового или клеевого соединения и электрически соединен с контроллером 3 и платой распределения 10. Приемник 19 закреплен на силовой раме с помощью резьбового или клеевого соединения и электрически соединен с контроллером 3 и платой распределения 10. Видеопередатчик 20 прикреплен к силовой раме с помощью резьбового или клеевого соединения и электрически соединен с камерой 1, контроллером 3 и платой распределения 10. Три сервопривода 21 присоединены к силовой раме с помощью посадки с натягом, клеевого соединения или резьбовых соединений и электрически соединены с контроллером 3 и платой распределения 10. Три тяги 22 прикреплены к тарелке автомата 23 и трем сервоприводам 21 с помощью посадки с натягом или шарнирного соединения. Тяга 22 может быть выполнена из металла, пластмассы или композитного материала. Тарелка автомата перекоса 23 прикрепляется к валу 24 с помощью, посадки с натягом или клеевого соединения. Тарелка автомата перекоса 23 может быть выполнена из пластмассы или композитного материала. Для снижения механических потерь и обеспечения подвижности автомата перекоса в тарелке автомата перекоса 23 установлен подшипник, обеспечивающий ее перемещения по нескольким степеням свободы. Вал 24 закрепляется на силовой раме посредством подшипника, установленного в силовой раме. Подшипник обеспечивает фиксацию вала 24 относительно силовой рамы и обеспечивает его вращение. Вал 24 может быть выполнен из металла, пластмассы или композитного материала. Ротор 25 прикрепляется к валу 24 с помощью посадки с натягом, резьбового или клеевого соединения. Ротор 25 может быть выполнен из металла, пластмассы или композитного материала. Три сервопривода 21, три тяги 22, тарелка автомата перекоса 23, ротор 25 вместе образуют автомат перекоса малоразмерного беспилотного летательного аппарата вертолетного типа. Основной винт 26 устанавливается на ротор 25 с помощью шарнирного соединения или резьбового соединения. Основной винт 26 может быть выполнен из пластмассы или композитного материала.
Малоразмерный беспилотный летательный аппарат вертолетного типа функционирует следующим образом. С пульта управления оператора на приемник 19 подаются сигналы управления, сформированные в зависимости от желаемого направления и скорости полета. Приемник 19 получает сигналы управления и передает их в контроллер 3. Контроллер 3 получает информацию от приемника 19, обрабатывает и преобразует полученную информацию, передает сигнал на регуляторы оборотов 12 и три сервопривода 21 в зависимости от желаемого направления и скорости полета. Хвостовой электродвигатель 16 предназначен для компенсации реактивного момента, возникающего при вращении основного винта 26, и для управления по курсу. На вход регулятора оборотов 12 хвостового электродвигателя 11 подается постоянное напряжение с аккумулятора 14. Регулятор оборотов 12 подает переменное трехфазное напряжение на хвостовой электродвигатель 11, в результате чего происходит вращение заднего винта 17 с необходимой скоростью для осуществления управления по курсу. На вход регулятора оборотов 12 маршевого электродвигателя 11 подается постоянное напряжение с аккумулятора 14. Регулятор оборотов 12 подает переменное трехфазное напряжение на маршевый электродвигатель 11 в результате чего происходит вращение основного винта 26 с необходимой скоростью для осуществления полета. На входы трех сервоприводов 21 подается постоянное напряжение от платы распределения 10 и управляющий сигнал от контроллера 3, благодаря чему происходит изменение положения плоскости тарелки автомата перекоса 23 через три тяги 22 и последующее изменение шага основного винта 26, что позволяет осуществлять полет в необходимом направлении с необходимой скоростью.
От платы распределения 10 подается постоянное напряжение на видеопередатчик 20. От видеопередатчика 20 подается постоянное напряжение на камеру 1. Камера 1 посылает сигнал на видеопередатчик 20. От контроллера 3 на видеопередатчик 20 могут передаваться данные телеметрии, которые могут накладываться на изображение, передаваемое видеопередатчиком 20. Видеопередатчик 20 передает изображение или изображение с наложенными на него данными телеметрии на периферийное оборудование, на котором отображается видеоизображение для оператора.
Для поддержания положения малоразмерного беспилотного летательного аппарата вертолетного типа на определенной высоте используется дальномер 9. С платы распределения 10 подается постоянное напряжение на дальномер 9. Дальномер 9 передает сигнал в контроллер 3. GPS–модуль 18 используется при планировании автономных миссий без участия оператора. GPS–модуль 18 позволяет обеспечить аварийный возврат на точку взлета в случает потери устройством управляющего сигнала.
Заявленное изобретение позволяет обеспечить снижение массогабаритных характеристик за счет понижения степени механизации устройства и возможности применения более легких материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2023 |
|
RU2820238C1 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2495797C2 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Способ управления аэродинамическими моментами вертолета соосной схемы | 2023 |
|
RU2820873C1 |
| ЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА ДЛЯ ТУШЕНИЯ ПОЖАРОВ В ВЫСОТНЫХ ЗДАНИЯХ | 2023 |
|
RU2807458C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
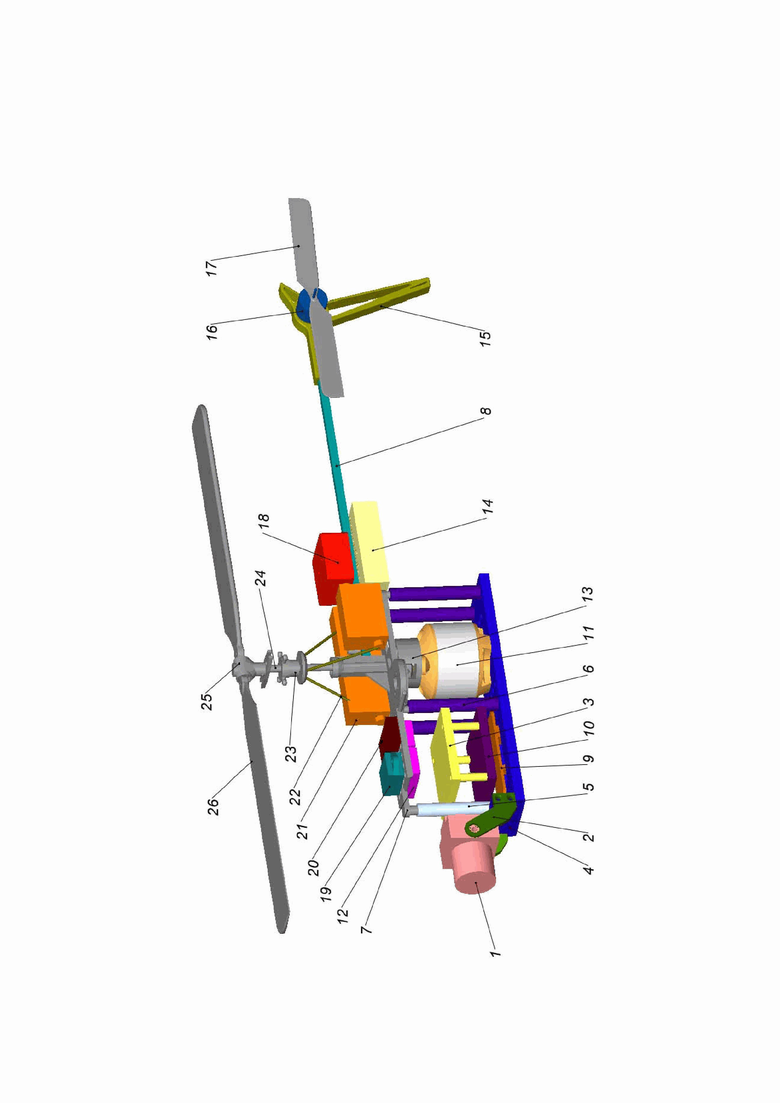
Малоразмерный беспилотный летательный аппарат вертолетного типа содержит силовую раму, состоящую из верхней (7) и нижней пластин (4), закрепленных с помощью передней (5) и четырех основных стоек (6), хвостовой балки (8) и оборудования, закрепленного на силовой раме, включающего камеру (1), два кронштейна (32), контроллер (3), дальномер(9), плату распределения (10), маршевый электродвигатель (11), два регулятора оборотов (12), компенсирующую муфту (13), аккумулятор (14), хвостовик (15), хвостовой электродвигатель (16), задний винт (17), GPS–модуль (18), приемник (19), видеопередатчик (20), три сервопривода (21), три тяги (22), тарелку автомата перекоса (23), вал (24), ротор (25), основной винт (26), установленные и выполненные определенным образом. Обеспечивается снижение массогабаритных характеристик малоразмерного беспилотного летательного аппарата вертолетного типа. 1 ил.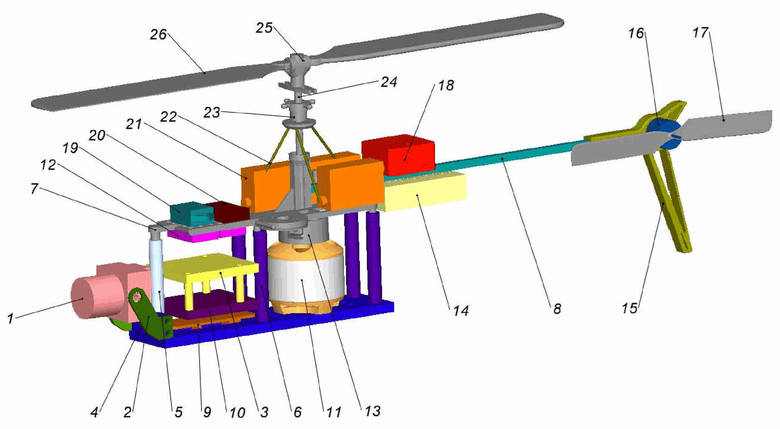
Малоразмерный беспилотный летательный аппарат вертолетного типа содержит камеру, закрепленную на двух кронштейнах и электрически соединенную с контроллером и видеопередатчиком, два кронштейна, закрепленных на нижней пластине, контроллер, закрепленный на нижней пластине, нижнюю пластину, переднюю стойку, четыре основных стойки, верхнюю пластину, балку, соединенные между собой и образующие силовую раму, дальномер, соединенный с силовой рамой, электрически соединенный с контроллером, плату распределения, закрепленную на силовой раме и электрически соединенную с контроллером и аккумулятором, маршевый электродвигатель, закрепленный на силовой раме и электрически соединенный с первым регулятором оборотов, регуляторы оборотов, прикрепленные к силовой раме и электрически соединенные с аккумулятором и контроллером, компенсирующую муфту, соединенную с маршевым электродвигателем, аккумулятор, закрепленный на силовой раме и электрически соединенный с платой распределения и двумя регуляторами оборотов, хвостовик, закрепленный на силовой раме, хвостовой электродвигатель, закрепленный в хвостовике и электрически соединенный со вторым регулятором оборотов, задний винт, закрепленный на хвостовом электродвигателе, GPS–модуль, установленный на силовую раму и электрически соединенный с контроллером и платой распределения, приемник, закрепленный на силовой раме и электрически соединенный с контроллером и платой распределения, видеопередатчик, закрепленный на силовой раме и электрически соединенный с контроллером и платой распределения, три сервопривода, установленные на силовой раме и электрически соединенные с контроллером и платой распределения, три тяги, соединенные с тремя сервоприводами, тарелку автомата перекоса, соединенную с тремя тягами и валом, вал, закрепленный в силовой раме и соединенный с компенсирующей муфтой и тарелкой автомата перекоса, ротор, соединенный с валом, основной винт, соединенный с ротором.
| Ю. П. Ведмедь,изобретения И. А. Строков, Л. Н. Краковский, Д. Е. Цивирко, М. И. Эпштейн,Л. А. Раев, С. Б. Кричевский, А. В. Смирнов, В. Г. Скундини Н. В. Тарасов | 0 |
|
SU212976A1 |
| 0 |
|
SU196251A1 | |
| US 20110301784 A1, 08.12.2011 | |||
| KR 1020070112413 A, 23.11.2007 | |||
| US 20090069957 A1, 12.03.2009. | |||
