Изобретение относится к области летательных аппаратов, конкретнее к области вертолетов и области летательных аппаратов с одним или несколькими несущими винтами.
Известен беспилотный вертолет, который содержит фюзеляж, включающий кабину с комплексом бортового оборудования, оптико-электронную систему, радиопрозрачный обтекатель, установленный в носовой части фюзеляжа, главный редуктор, систему соосных несущих винтов, верхний несущий трехлопастный винт и нижний несущий трехлопастный винт, два автомата перекоса, турбовальный двигатель, левый и правый боковые кили, установленные на хвостовой балке под углом к продольной оси вертолета хвостиками вниз, топливный бак и полозковое шасси, промежуточный редуктор, карданный вал, втулку толкающего винта, выполненную в виде трехлучевой звезды, к которой прикреплены три лопасти толкающего винта, толкающий трехлопастный винт, при этом промежуточный редуктор, содержащий входной вал, главный вал и выходной вал, входным валом с помощью муфты соединен с выходным валом турбовального двигателя, вместе с тем, главный вал промежуточного редуктора с помощью эластичной муфты соединен с валом главного редуктора, одновременно с этим, выходной вал промежуточного редуктора посредством муфты соединен с карданным валом, который обеспечивает взаимную кинематическую связь с втулкой толкающего винта [патент РФ №211375, B64C 27/22, B64D 35/04, B64C 39/02 опубл. 02.06.2022].
Недостатками аналога является большая масса, обусловленная наличием редуктора и двух соосных винтов, и низкая надежность, обусловленная высокой степенью механизации автомата перекоса.
Известен беспилотный вертолет радиолокационного дозора, содержащий фюзеляж, включающий кабину с комплексом бортового оборудования и оптико-электронной системой, радиопрозрачный обтекатель, установленный в носовой части фюзеляжа, бортовую радиолокационную станцию с фазированной антенной решеткой, систему двух соосных несущих винтов, содержащую главный редуктор, два соосных несущих трехлопастных винта, вращающихся в противоположных направлениях, цепи управления каждым из несущих винтов, включающие два автомата перекоса, турбовальный двигатель, левый и правый боковой киль, установленный на хвостовой балке под углом к продольной оси вертолета хвостиками вниз, топливный бак, полозковое шасси, двухстепенный карданный подвес с расположенной на нем фазированной антенной решеткой с возможностью горизонтального и вертикального отклонения от строительной оси беспилотного вертолета , при этом карданный подвес с фазированной антенной решеткой размещен внутри носовой части фюзеляжа за радиопрозрачным обтекателем, в то же время двухстепенный карданный подвес содержит внутреннюю и внешнюю рамку, горизонтальный и вертикальный привод, горизонтальный и вертикальный привод поворота [патент РФ №212196, H01Q 1/28, G01S 13/06, B64C 1/36, опубл. 11.07.2022].
Недостатками аналога являются низкая надежность, обусловленная применением двух автоматов перекоса, а также большая масса, обусловленная высокой степенью механизации системы управления несущими винтами.
Известен беспилотный летательный аппарат вертикального взлета и посадки, который содержит корпус с несущим винтом, размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу и целевой груз. Груз свободно подвешен к корпусу в точке, лежащей на его вертикальной оси симметрии, и кинематически связан с аэродинамическими рулями посредством шарнирно-рычажных механизмов. Каждый из механизмов включает коромысло и тяги, соединяющие одно плечо коромысла с грузом или его подвесом, а другое - с соответствующим рулем. Тяга, сочлененная одним концом с грузом или его подвесом, соединена с коромыслом с возможностью передачи движения только в одном направлении [патент №2648491, B64C 17/04, опубл. 26.03.2018].
Недостатками аналога включают его большой вес, связанный с многокомпонентностью шарнирно-рычажных конструкций, а также недостаточную надежность и ограниченную маневренность, вызванные длинной кинематической связью между грузом и аэродинамическими рулями.
Известен беспилотный вертолет, содержащий фюзеляж, кабину с комплексом бортового оборудования, оптико-электронную систему, радиопрозрачный обтекатель, установленный в носовой части фюзеляжа, главный редуктор, систему соосных несущих винтов, верхний несущий трехлопастный винт и нижний несущий трехлопастный винт, два автомата перекоса, турбовальный двигатель, левый и правый боковые кили, установленные на хвостовой балке под углом к продольной оси вертолета хвостиками вниз, топливный бак, толкающий трехлопастный винт, центральный горизонтальный киль, установленный на хвостовой балке, правое и левое крылья адаптивного размаха, закрепленные в верхней части фюзеляжа, при этом хвостовая балка имеет возможность вертикального изменения угла от продольной оси вертолета в полете, вместе с тем, левое и правое крылья адаптивного размаха содержат силовую панель, пропущенную через центральную часть фюзеляжа, правое и левое складывающиеся крылья, правую и левую законцовки крыльев, которые при опускании крыла адаптивного размаха выполняют роль полозкового шасси, одновременно с этим, правый и левый боковой кили имеют законцовки, выполняющие при посадке роль полозкового шасси, вместе с тем, законцовки левого и правого крыльев адаптивного размаха, правого и левого боковых килей выполнены из амортизационного материала для поглощения кинетической энергии посадочного удара при посадке [патент РФ №214067, B64C 27/22, B64C 39/02, B64C 25/66, опубл. 11.10.2022].
Недостатками аналога является его большой вес, который обусловлен наличием двух несущих винтов, а также низкая надежность конструкции, связанная с высокой степенью механизации задней части фюзеляжа, правого и левого складных крыльев.
Задача изобретения - управление несущими винтами малоразмерного беспилотного вертолета без использования автомата перекоса.
Технический результат изобретения - снижение степени механизации системы управления несущими винтами малоразмерного беспилотного вертолета.
Поставленная задача решается, а технический результат достигается тем, что малоразмерный беспилотный вертолет без автомата перекоса содержит силовую раму, состоящую из верхней части рамы, нижней части рамы и хвостовой балки, при этом верхняя часть рамы и нижняя часть рамы соединены между собой, а хвостовая балка прикреплена к верхней части рамы;
на нижнюю часть рамы установлен полетный контроллер, а также электрически соединенные с ним камера, приемник, регулятор оборотов;
на верхнюю часть рамы установлены видеопередатчик и GPS-модуль, электрически соединенные с полетным контроллером, регулятор хвостового электродвигателя, электрически соединенный с полетным контроллером и хвостовым электродвигателем, мультиплексор, электрически соединенный с полетным контроллером и регулятором оборотов, а также основной электродвигатель, электрически соединенный с регулятором оборотов, к основному электродвигателю прикреплена цанга, шатуны прикреплены к цанге, к каждом шатуну прикреплен винт основной;
на хвостовую балку установлен хвостовик, к которому прикреплен хвостовой электродвигатель для вращения хвостового винта, а также аккумулятор, электрически соединенный с полетным контроллером.
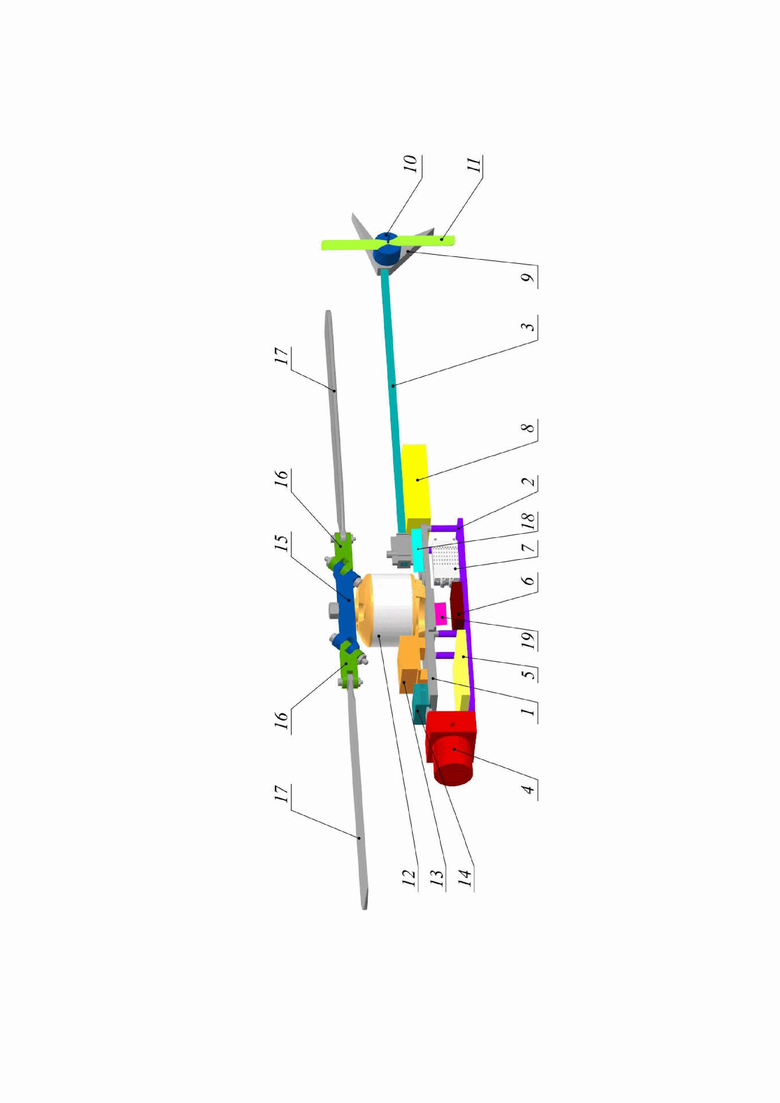
Сущность изобретения поясняется чертежом, на которых представлен общий вид малоразмерного беспилотного вертолета без автомата прекоса.
Малоразмерный беспилотный вертолет без автомата перекоса состоит из верхней части рамы 1, нижней части рамы 2, хвостовой балки 3, камеры 4, полетного контроллера 5, приемника 6, регулятора 7, аккумулятора 8, хвостовика 9, хвостового электродвигателя 10, хвостового винта 11, основного электродвигателя 12, GPS-модуля 13, видеопередатчика 14, цанги 15, двух шатунов 16, двух винтов основных 17, мультиплексора 18, регулятора хвостового электродвигателя 19.
К верхней части рамы 1 прикрепляется нижняя часть рамы 2 и хвостовая балка 3 с помощью резьбового соединения, посадки с натягом или клеевого соединения, образуя силовую раму. Верхняя часть рамы 1, нижняя часть рамы 2 и хвостовая балка 3 могут быть выполнены из металла, пластмассы или композитного материала.
На силовую раму прикреплены камера 4 и видеопередатчик 14 с помощью резьбовых соединений или клеевого соединения, электрически соединены с полетным контроллером 5. Полетный контроллер 5 закреплен на силовой раме с помощью резьбовых соединений. GPS-модуль 13 закреплен на силовой раме с помощью клеевого соединения и электрически соединен с полетным контроллером 5. Приемник 6 закреплен на силовой раме с помощью резьбового или клеевого соединения, электрически соединен с полетным контроллером 5. Аккумулятор 8 закреплен на силовой раме с помощью текстильной застежки и электрически соединен с полетным контроллером 5.
Мультиплексор 18 закреплен на силовой раме с помощью резьбового или клеевого соединения и электрически соединен с регулятором 7 и полетным контроллером 5. Регулятор 7 прикреплен к силовой раме с помощью резьбового или клеевого соединения. Основной электродвигатель 12 закреплен на силовой раме с помощью резьбовых соединений и электрически соединен с регулятором 7. На роторе основного электродвигателя 12 закреплена цанга 15 посредством резьбовых соединений, или посадки с натягом, или клеевого соединения. На цанге 15 закреплены два шатуна 16 с помощью штифтового или резьбового соединения с возможностью поворота шатунов 16 на определенный угол относительно оси штифта или крепежного элемента. На двух шатунах 16 установлены два винта основных 17 посредством штифтовых или резьбовых соединений с возможностью поворота винтов основных 17 на определенный угол относительно осей штифтов или крепежных элементов. Цанга 15, шатун 16 могут быть выполнены из металла, пластмассы или композитного материала. Винты основные 17 могут быть выполнены из пластмассы, композитного материала или дерева.
На силовую раму закреплен хвостовик 9 с помощью клеевого соединения или посадки с натягом, к которому прикреплен хвостовой электродвигатель 10 с помощью резьбовых соединений. На ротор хвостового электродвигателя 10 прикреплен хвостовой винт 11 с помощью резьбового соединения, клеевого соединения или посадки с натягом. Хвостовой электродвигатель 10 электрически соединен с регулятором хвостового электродвигателя 19. Регулятор хвостового электродвигателя 19 прикреплен к силовой раме с помощью клеевого или резьбового соединения и электрически соединен с полетным контроллером 5. Хвостовик 9 может быть выполнен из пластмассы, металла или композитного материала. Хвостовой винт 11 может быть выполнен из пластика или композитного материала.
Малоразмерный беспилотный вертолет без автомата перекоса функционирует следующим образом. С пульта управления оператора на приемник 6 подаются сигналы управления, сформированные в зависимости от желаемого направления и скорости полета. Приемник 6 передает сигналы управления в полетный контроллер 5. Полетный контроллер 5 обрабатывает и преобразует полученную информацию и передает сигналы на мультиплексор 18. Эти сигналы задают уровень мощности, подаваемой на основной электродвигатель 12, управляющие воздействия по тангажу и крену. От датчика положения ротора, содержащегося в основном электродвигателе 12, на мультиплексор 18 поступает сигнал о положении ротора основного электродвигателя 12. Мультиплексор 18 с определенной частотой обрабатывает поступающие в него сигналы об уровне мощности, подаваемой на основной электродвигатель 12, об управляющем воздействии по крену, об управляющем воздействии по тангажу и о положении ротора основного электродвигателя 12. Опираясь на поступающие сигналы, мультиплексор 18 формирует выходной сигнал на регулятор 7, который на основании поступающего сигнала изменяет частоту вращения основного электродвигателя 12 и угловое ускорение ротора основного электродвигателя 12, получая электроэнергию от аккумулятора 8. За счет изменения частоты вращения основного электродвигателя 12 происходит изменение тяги, развиваемой силовой установкой. За счет изменения углового ускорения основного электродвигателя 1 происходит поворот шатунов 16 относительно цанги 15, что вызывает изменение угла атаки винтов основных 17. В результате этого происходит изменение направления вектора тяги силовой установки. Изменение направления вектора тяги происходит несколько раз для каждого винта основного 17 за каждый оборот ротора основного электродвигателя 12.
Хвостовой электродвигатель 10 предназначен для компенсации реактивного момента, возникающего при вращении винтов основных 17, и для управления по курсу. С аккумулятора 8 подается постоянное напряжение на регулятор хвостового электродвигателя 19. Полетный контроллер 5 подает сигнал управления на регулятор хвостового электродвигателя 19, который в свою очередь подает переменное трехфазное напряжение на хвостовой электродвигатель 10, в результате чего происходит вращение хвостового винта 11 на определенной частоте для осуществления управления по курсу и компенсации реактивного момента.
От полетного контроллера 5 подается постоянное напряжение на видеопередатчик 14. От видеопередатчика 14 подается постоянное напряжение на камеру 4. Камера 4 посылает сигнал на видеопередатчик 14. От полетного контроллера 5 на видеопередатчик 14 могут передаваться данные телеметрии, которые могут накладываться на изображение, передаваемое видеопередатчиком 14. Видеопередатчик 14 передает изображение или изображение с наложенными на него данными телеметрии на периферийное оборудование, на котором отображается видеоизображение для оператора.
К полетному контроллеру 5 подключен GPS-модуль 13, который используется при планировании автономных миссий без участия оператора. GPS-модуль 13 позволяет обеспечить аварийный возврат на точку взлета в случает потери устройством управляющего сигнала.
Таким образом, заявленное изобретение позволяет обеспечить управление несущими винтами малоразмерного беспилотного вертолета без использования автомата перекоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2023 |
|
RU2820238C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| Способ управления аэродинамическими моментами вертолета соосной схемы | 2023 |
|
RU2820873C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2810886C1 |
| Вертолет соосной схемы (варианты) | 2023 |
|
RU2820875C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
Изобретение относится к области летательных аппаратов, конкретнее к области вертолетов и области летательных аппаратов с одним или несколькими несущими винтами. Малоразмерный беспилотный вертолет без автомата перекоса содержит силовую раму, состоящую из верхней части рамы, нижней части рамы и хвостовой балки. На нижнюю часть рамы установлен полетный контроллер, электрически соединенные с ним камера, приемник, регулятор оборотов. На верхнюю часть рамы установлены видеопередатчик и GPS-модуль, электрически соединенные с полетным контроллером, регулятор хвостового электродвигателя, электрически соединенный с полетным контроллером и хвостовым электродвигателем, мультиплексор, электрически соединенный с полетным контроллером и регулятором оборотов, основной электродвигатель, электрически соединенный с регулятором оборотов, к основному электродвигателю прикреплена цанга, шатуны прикреплены к цанге, к каждому шатуну прикреплен винт основной. На хвостовую балку установлен хвостовик. Технический результат: снижение степени механизации системы управления несущими винтами малоразмерного беспилотного вертолета. 1 ил.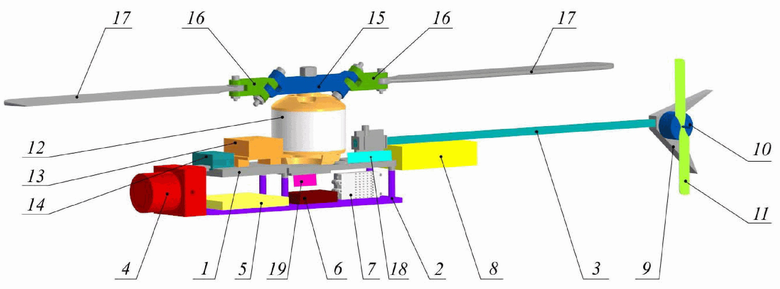
Малоразмерный беспилотный вертолет без автомата перекоса, содержащий силовую раму, состоящую из верхней части рамы, нижней части рамы и хвостовой балки, при этом верхняя часть рамы и нижняя часть рамы соединены между собой, а хвостовая балка прикреплена к верхней части рамы;
на нижнюю часть рамы установлен полетный контроллер, а также электрически соединенные с ним камера, приемник, регулятор оборотов;
на верхнюю часть рамы установлены видеопередатчик и GPS-модуль, электрически соединенные с полетным контроллером, регулятор хвостового электродвигателя, электрически соединенный с полетным контроллером и хвостовым электродвигателем, мультиплексор, электрически соединенный с полетным контроллером и регулятором оборотов, а также основной электродвигатель, электрически соединенный с регулятором оборотов, к основному электродвигателю прикреплена цанга, шатуны прикреплены к цанге, к каждому шатуну прикреплен винт основной;
на хвостовую балку установлен хвостовик, к которому прикреплен хвостовой электродвигатель для вращения хвостового винта, а также аккумулятор, электрически соединенный с полетным контроллером.
| ВОРОТА ПОДЪЕМНО-ПОВОРОТНЫЕ | 1966 |
|
SU214067A1 |
| Привод валков станов холодной прокатки труб | 1966 |
|
SU219528A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ КОРМА ДЛЯ ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ | 0 |
|
SU207716A1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
