Изобретение относится к движителям транспортных средств повышенной проходимости, в частности к движителям роботизированных курьерских комплексов (роботов-курьеров).
Уровень техники в данной области характеризует роботизированный курьерский комплекс (патент US 10459450 В2), в качестве движителя которого используются три пары неповоротных колес, при этом движение и маневрирование робота-курьера осуществляется за счет взаимного изменения скорости вращения левых и правых колес.
Недостатком данного движителя является низкая проходимость колес в тяжелых дорожных условиях (снег, грязь и т.д.), что ограничивает распространение роботов-курьеров в зонах с умеренным и холодным климатом.
Известно техническое решение для движения роботов-курьеров в тяжелых дорожных условиях (патенты RU 2784225 С1 и RU 2787095 С1), содержащее в себе роботы-курьеры с шагающим движителем, а также коптеры, доставляющие груз по воздуху.
Недостатком данного решения является значительно более высокая сложность и стоимость, по сравнению с колесным движителем, шагающего движителя и коптера, что особенно важно для роботизированных курьерских комплексов, являющихся системой массового обслуживания, которая может столкнуться с вандализмом.
Наиболее близким к заявленной конструкции является модуль колесно-гусеничного движителя (патент RU 2784225 С1), содержащий колесный и гусеничный движители. На валу или полой оси колесного движителя установлены один на другой приводной полый вал ведущего зубчатого колеса гусеничного движителя и полый вал для крепления к раме транспортного средства с фланцем. Гусеничный движитель установлен на вал ведущего зубчатого колеса с возможностью поступательного и вращательного движений с помощью пазов в корпусе. Шасси с двумя модулями колесно-гусеничных движителей закреплены к раме шасси слева и справа, при этом колесные движители модулей управляются с помощью гиростабилизирующей системы. В одном модуле между средством для амортизации гусеничного движителя и кронштейном или рамой устанавливается стабилизатор горизонтального положения рамы, взаимодействующий с датчиком положения. К раме крепится выдвигающееся средство от опрокидывания шасси и для подъема рамы.
Общими признаками с заявленным движителем является возможность использования колесного (при движении по дорогам с твердым покрытием) и гусеничного (при движении по грязи, снегу и при других тяжелых дорожных условиях) движителя, а также возможность демонтажа гусеничного движителя.
Недостатком данного устройства является то, что гусеничный движитель выполнен в виде отдельного модуля, включающего в себя стабилизатор горизонтального положения рамы, датчики положения и гиростабилизирующую систему, в результате чего сложность и стоимость движителя робота-курьера значительно возрастают. Также недостатком является необходимость установки такого модуля на каждое колесо робота-курьера, что, в случае близкого расположения колес, не всегда возможно конструктивно.
Задачей, на решение которой направлено настоящее изобретение, является повышение проходимости робота-курьера в тяжелых дорожных условиях (снег, грязь и т.д.), при сохранении возможности движения с высокой скоростью по дорогам с твердым покрытием, при этом эксплуататор роботов-курьеров должен иметь возможность конфигурировать робота-курьера под текущие дорожные условия.
Задача решается за счет того, что конфигурируемый колесно-гусеничный движитель роботизированных курьерских комплексов включает в себя колесную конфигурацию, предназначенную для движения робота-курьера по дорогам с твердым покрытием, и гусеничную конфигурацию, предназначенную для движения робота-курьера в тяжелых дорожных условиях (снег, грязь и т.д.).
Колесная конфигурация включает в себя две и более неповоротные пары основных колес, установленных в корпусе робота-курьера, при этом движение и маневрирование робота-курьера осуществляется за счет взаимного изменения скорости вращения левых и правых колес.
Гусеничная конфигурация включает в себя гусеничные ленты (гусеницы) и дополнительные колеса, устанавливаемые на основные колеса таким образом, чтобы между ними был зазор для выступов гусеницы, фиксирующих ее на колесах, при этом передача крутящего момента с основных колес на гусеницы может осуществляться как за счет трения между внешними поверхностями основных и дополнительных колес и внутренней поверхностью гусениц, так и за счет зубцов на дополнительных колесах, взаимодействующих с пазами в гусеницах. Для повышения проходимости и обеспечения натяжения гусеницы, гусеничная конфигурация может включать в себя передние и задние, или только передние, или только задние ленивцы. Также возможна конфигурация без ленивцев, при этом натяжение гусениц обеспечивается за счет их эластичности.
Смена конфигурации с колесной на гусеничную и обратно выполняется силами эксплуататора роботов-курьеров в зависимости от текущих дорожных условий, для этого необходимо снять (установить) гусеницы и дополнительные колеса, а также (при их наличии) ленивцы.
Сущность заявленного изобретения поясняется следующими фигурами:
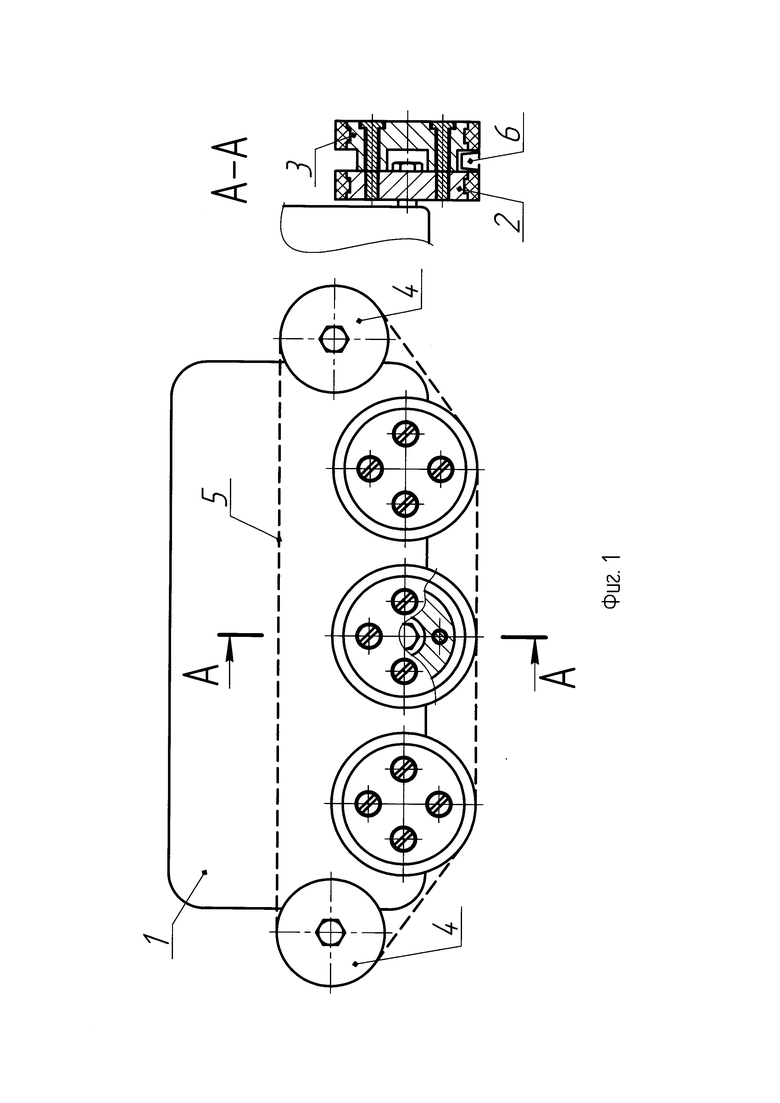
фиг. 1 - принципиальное устройство конфигурируемого колесно-гусеничного движителя роботизированных курьерских комплексов (в гусеничной конфигурации, вариант исполнения с передними и задними ленивцами);
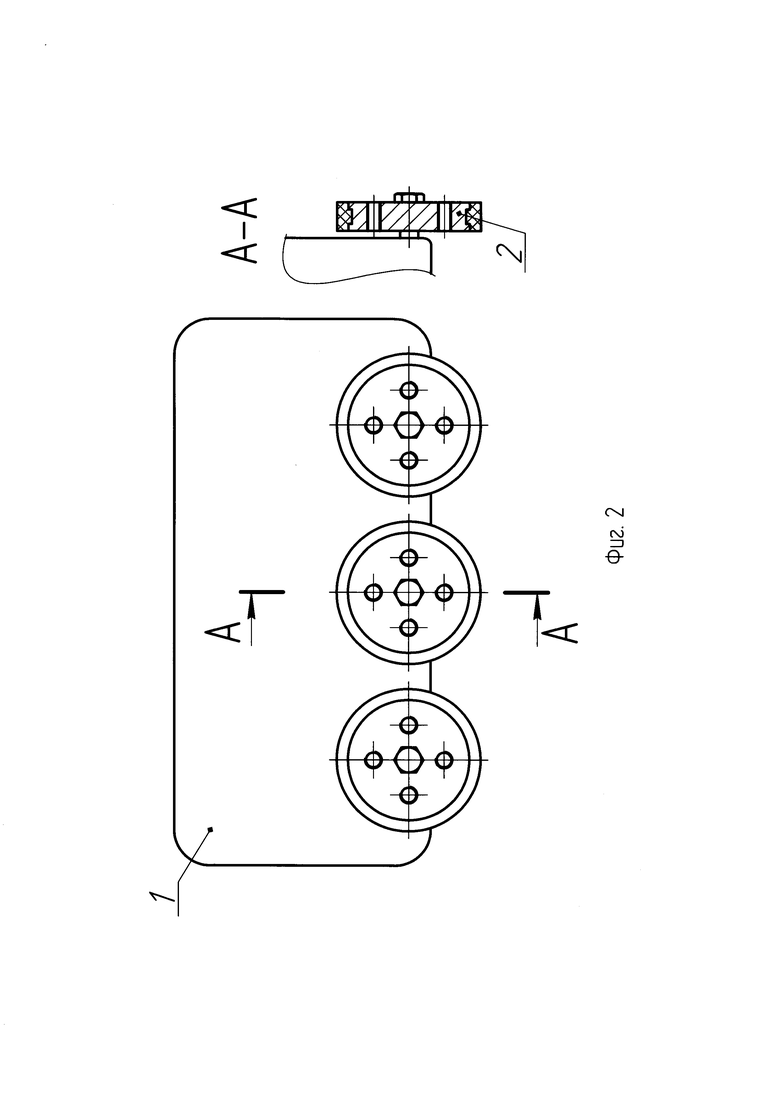
фиг. 2 - колесная конфигурация движителя;
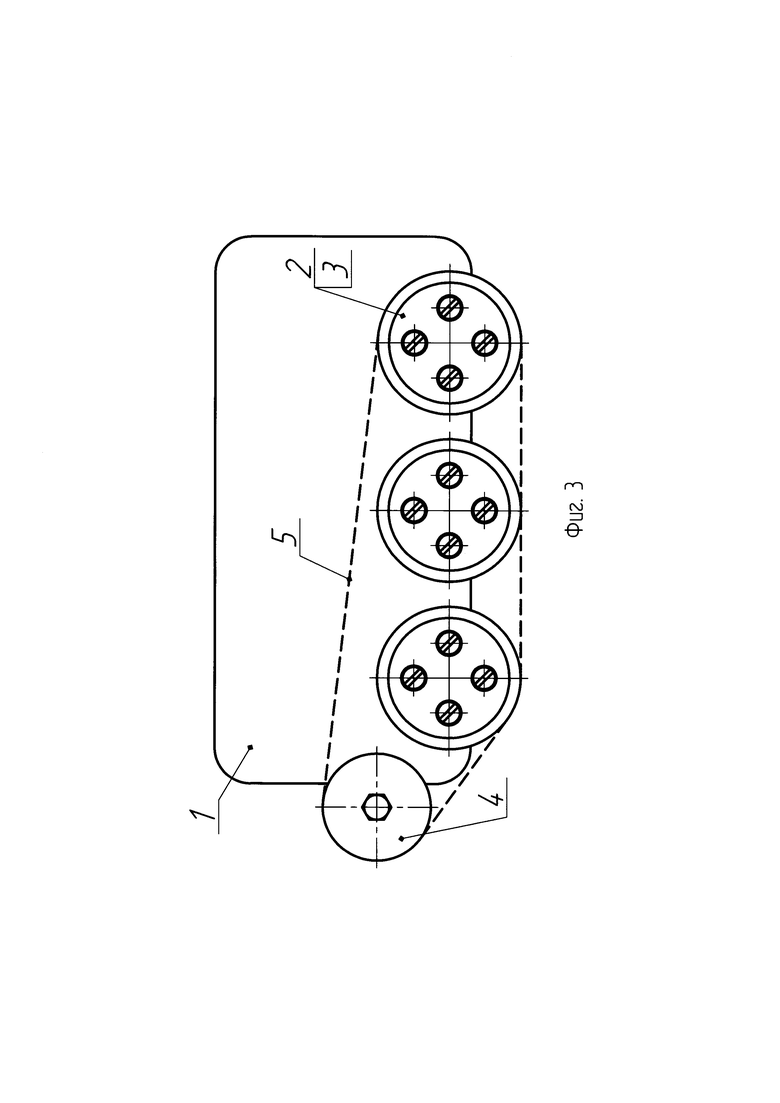
фиг. 3 - гусеничная конфигурация движителя, вариант исполнения с передними ленивцами;
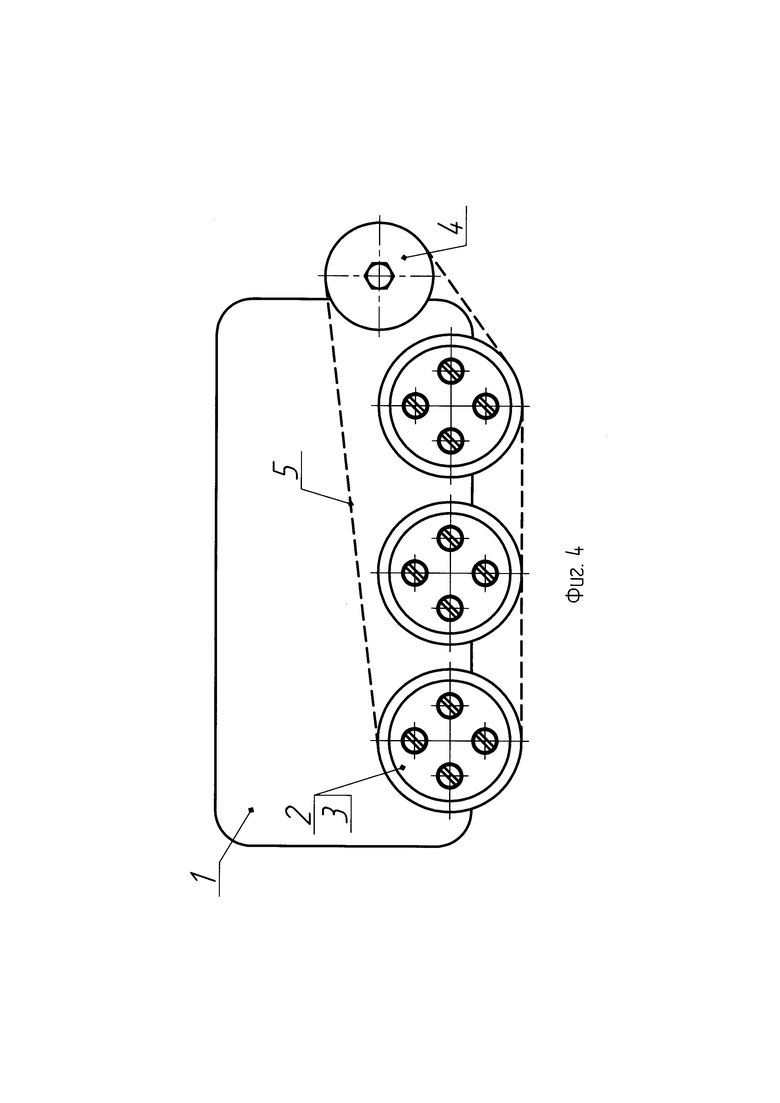
фиг. 4 - гусеничная конфигурация движителя, вариант исполнения с задними ленивцами;
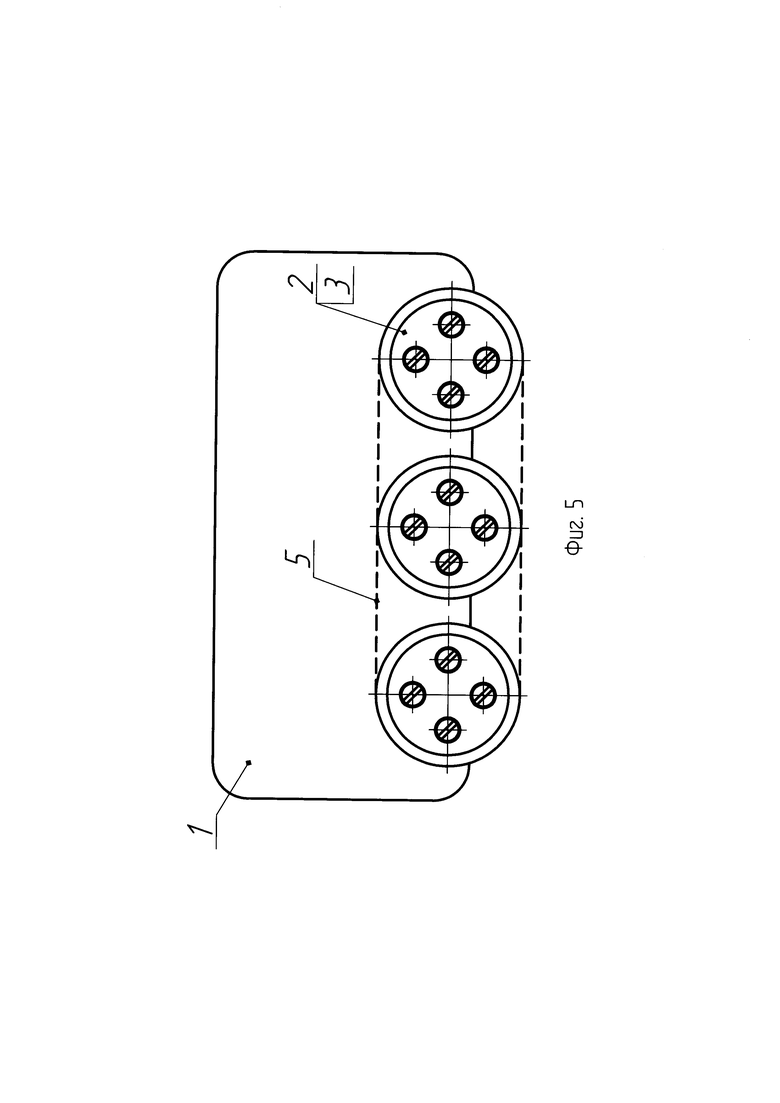
фиг. 5 - гусеничная конфигурация движителя, вариант исполнения без ленивцев.
Гусеничная конфигурация движителя (вариант исполнения с передними и задними ленивцами) включает в себя корпус робота-курьера 1, в котором установлены две и более неповоротные пары основных колес 2, при этом движение и маневрирование робота-курьера осуществляется за счет взаимного изменения скорости вращения левых и правых колес (фиг. 1). На основных колесах установлены гусеничные ленты (гусеницы) 5 и дополнительные колеса 3, при этом между основными и дополнительными колесами предусмотрен зазор для выступов гусеницы 6, фиксирующих ее на колесах, при этом передача крутящего момента с основных колес на гусеницы может осуществляться как за счет трения между внешними поверхностями основных и дополнительных колес и внутренней поверхностью гусениц, так и за счет зубцов на дополнительных колесах, взаимодействующих с пазами в гусеницах. Также на корпусе робота-курьера установлены передние и задние ленивцы 4, предназначенные для натяжения гусеницы, а также для повышения проходимости в тяжелых дорожных условиях (грязь, снег и т.д.).
Колесная конфигурация включает в себя корпус робота-курьера 1, в котором установлены две и более неповоротные пары основных колес 2, при этом движение и маневрирование робота-курьера осуществляется за счет взаимного изменения скорости вращения левых и правых колес (фиг. 2).
Гусеничная конфигурация движителя (вариант исполнения с передними ленивцами) аналогична варианту исполнения с передними и задними ленивцами, за исключением того, что для натяжения гусеницы 5 используются только передние ленивцы 4, задние ленивцы отсутствуют (фиг. 3).
Гусеничная конфигурация движителя (вариант исполнения с задними ленивцами) аналогична варианту исполнения с передними и задними ленивцами, за исключением того, что для натяжения гусеницы 5 используются только задние ленивцы 4, задние ленивцы отсутствуют (фиг. 4).
Гусеничная конфигурация движителя (вариант исполнения без ленивцев) аналогична варианту исполнения с передними и задними ленивцами, за исключением того, что в ней отсутствуют ленивцы, а натяжение гусениц 5 осуществляется за счет их эластичности (фиг. 5).
Изобретение относится к способам конфигурирования колесно-гусеничного курьерского комплекса (робот-курьер). Конфигурируемый колесно-гусеничный курьерский комплекс включает колесную конфигурацию и гусеничную конфигурацию. Эксплуататор роботов-курьеров может конфигурировать его под текущие дорожные условия. Колесная конфигурация включает две и более неповоротные пары основных колес, установленных в корпусе робота-курьера. Гусеничная конфигурация включает в себя гусеничные ленты и дополнительные колеса, устанавливаемые на основные колеса таким образом, чтобы между ними был зазор для выступов гусеницы, фиксирующих ее на колесах. Передача крутящего момента с основных колес на гусеницы может осуществляться как за счет трения между внешними поверхностями основных и дополнительных колес и внутренней поверхностью гусениц, так и за счет зубцов на дополнительных колесах, взаимодействующих с пазами в гусеницах. Гусеничная конфигурация может включать в себя передние и задние, или только передние, или только задние ленивцы. Также возможна конфигурация без ленивцев, при этом натяжение гусениц обеспечивается за счет их эластичности. Достигается повышение проходимости при сохранении возможности высокой скорости движения по дорогам с твердым покрытием. 4 з.п. ф-лы, 5 ил.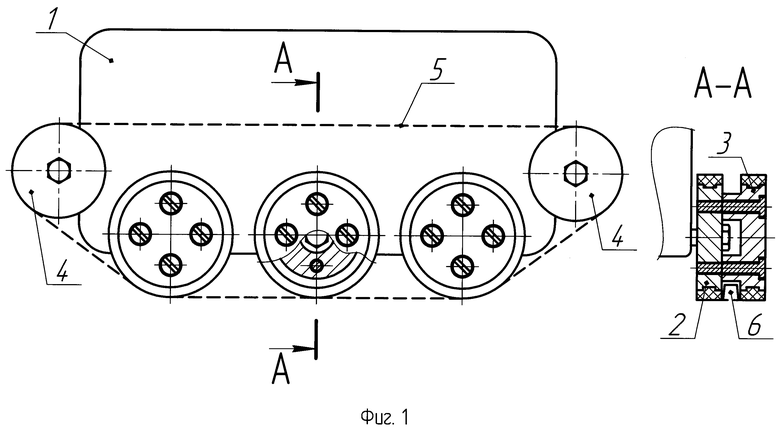
1. Способ конфигурирования роботизированного курьерского комплекса (робот-курьер) с колесным движителем, содержащим две и более неповоротные пары основных колес, установленных в корпусе робота-курьера, движение и маневрирование которого осуществляют за счет взаимного изменения скорости вращения левых и правых колес, отличающийся тем, что на колесный движитель устанавливают эластичные гусеницы, дополнительные колеса,
причем дополнительные колеса устанавливают на основные колеса таким образом, чтобы между ними был зазор для выступов гусеницы, фиксирующих ее на колесах, при этом передачу крутящего момента с основных колес на гусеницы могут осуществлять как за счет трения между внешними поверхностями основных и дополнительных колес и внутренней поверхностью гусениц, так и за счет зубцов на дополнительных колесах, взаимодействующих с пазами в гусеницах, при этом эксплуататор роботов-курьеров может конфигурировать робота-курьера под текущие дорожные условия.
2. Способ конфигурирования роботизированного курьерского комплекса по п. 1, отличающийся тем, что устанавливают передние ленивцы и натяжение гусениц обеспечивают передними ленивцами.
3. Способ конфигурирования роботизированного курьерского комплекса по п. 1, отличающийся тем, что устанавливают задние ленивцы и натяжение гусениц обеспечивается задними ленивцами.
4. Способ конфигурирования роботизированного курьерского комплекса по п. 1, отличающийся тем, что устанавливают передние и задние ленивцы и натяжение гусениц обеспечивается передними и задними ленивцами.
5. Способ конфигурирования роботизированного курьерского комплекса по п. 1, отличающийся тем, что натяжение гусениц обеспечивается за счет их эластичности.
| US 6615939 B1, 09.09.2003 | |||
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ БЛОК ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2331539C2 |
| US 10459450 B2, 29.10.2019 | |||
| ЛОГИЧЕСКИЙ ЭЛЕМЕНТ «НЕ-ИЛИ» НА ТУННЕЛЬНЫХ ДИОДАХ И ДИОДЕ С НАКОПЛЕНИЕМ ЗАРЯДА | 0 |
|
SU184521A1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ВЕЗДЕХОДА И ВЕЗДЕХОД | 2009 |
|
RU2410277C9 |

