Изобретение относится к измерительной технике, предназначено для автономного измерения параметров гравитационного поля на борту космических аппаратов и может быть использовано, в частности, в геологии для глобального поиска и определения запасов полезных ископаемых, в геодезии для уточнения глобальной и локальной моделей гравитационного поля Земли (ГПЗ) и других планет, для мониторинга временных вариаций гравитационного поля, а также в навигации по ГПЗ для подготовки глобальных навигационных гравиметрических карт.
Известен способ измерения гравитационного ускорения на борту космического аппарата (КА), который может быть реализован с помощью космической геодезической системы DORIS [1,2].
В основу принципа действия системы DORIS заложено точное измерение доплеровского сдвига радиочастоты сигналов, излучаемых наземными маяками и принимаемых на борту космического аппарата. Частоты излучений наземных маяков составляют 2.03625 ГГц и 401.25 МГц (вторая частота - для коррекции ионосферной задержки при распространении сигналов).
Оборудование системы DORIS располагается на борту целого ряда геодезических спутников (например, TOPEX/POSEIDON, Jason-1,2,3, ENVISAT и др.), а также на борту спутников для дистанционного зондирования SPOT-2, SPOT-3, SPOT-4 и SPOT-5 и др. Наземная глобальная сеть системы содержит более 50 маяков-излучателей, в том числе три маяка - на территории России.
Система может использоваться для уточнения текущего гравитационного ускорения КА, которое соответствует ускорению свободного падения в подспутниковой точке.
Способ измерения на основе системы DORIS состоит в использовании доплеровского смещения частоты сигнала, излучаемого наземным маяком, и включает следующие операции:
1. С наземного маяка системы DORIS в верхнюю полусферу околоземного пространства излучают непрерывный сигнал с частотой 2.03625 ГГц (длина волны λ ≈ 15 см).
2. На борту КА, движущегося по низкой орбите с радиус-вектором ρКА и высотой Н над Землей, принимают этот сигнал и измеряют доплеровское смещение его частоты, которое определяется текущей радиальной скоростью спутника относительно наземного маяка.
3. По результатам текущих измерений доплеровского смещения частоты в моменты t1, t2, соответствующие точкам 1 и 2 орбиты, на спутнике вычисляют приращение (изменение) доплеровского смещения ΔFD при перемещении спутника вдоль орбиты из точки 1 в точку 2.
4. По разности доплеровских смещений, измеренных в двух точках траектории спутника вблизи точки траверза и отнесенных к интервалу времени между этими измерениями Δt=t2 - t1, определяют радиальное (лучевое) ускорение КА относительно наземного маяка.
5. По величине лучевого ускорения в точке траверза определяют текущее гравитационное ускорение КА на середину интервала времени Δt=t2 - t1 между измерениями доплеровского смещения частоты:

Недостатки этого способа измерений заключаются в следующем:
- неработоспособность над океаном, вследствие отсутствия надводных маяков;
- ограниченная точность измерений гравитационного ускорения;
- недостаточная детальность (пространственная плотность) измерений ускорения на единицу длины орбиты вследствие большого интервала времени между необходимыми измерениями доплеровского смещения;
- невозможность автономного измерения других параметров ГПЗ на борту КА.
Известен способ-прототип, основанный на определении текущих координат КА с помощью бортовой навигационной аппаратуры потребителей (НАП) глобальных навигационных спутниковых систем (ГНСС) [3].
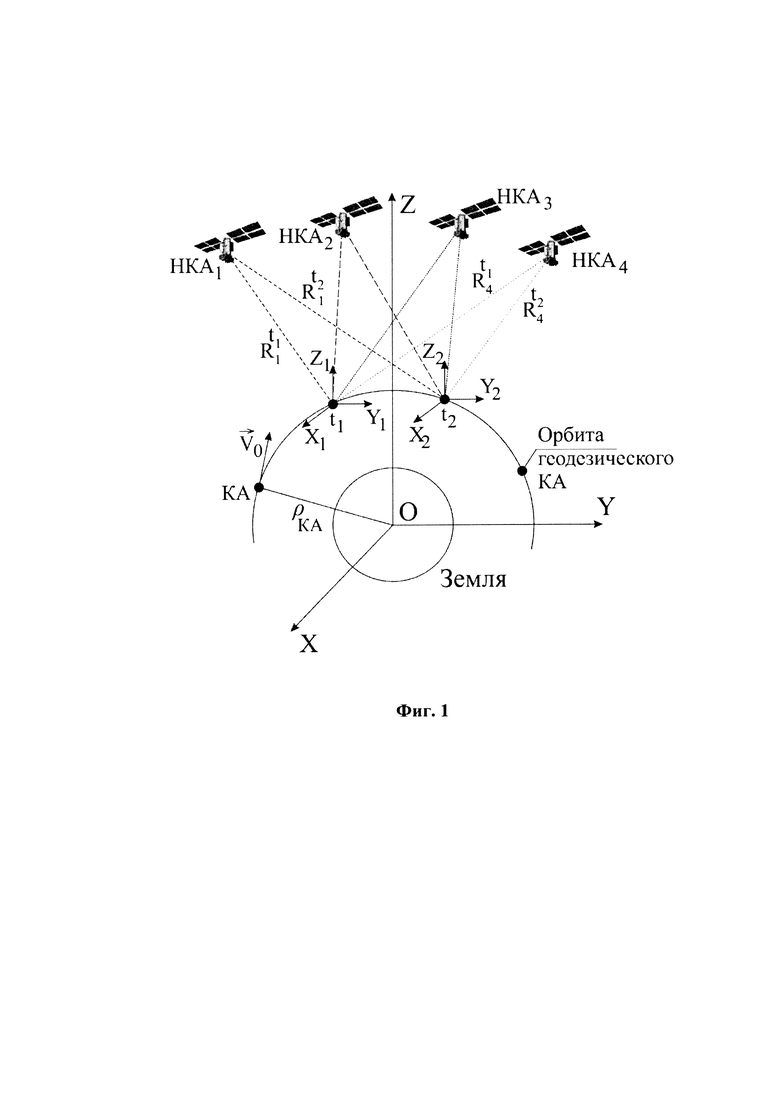
Рассмотрим движение низкоорбитального геодезического КА по круговой околоземной орбите в геоцентрической системе координат OXYZ (фиг. 1). Спутник имеет радиус-вектор ρКА и орбитальную круговую скорость движения V0. Навигационные КА (НКА) излучают в сторону Земли навигационные сигналы, привязанные по времени к шкале времени НКА и имеющие известную частоту. Кроме того, НКА сообщают на Землю свои текущие эфемериды в этой же системе координат. На борту КА решается навигационная задача, состоящая в определении текущих координат и скорости КА в выбранной системе координат. Как известно [1], для получения однозначного навигационного решения на борту КА необходимо измерить запаздывание и доплеровское смещение частоты навигационного сигнала одновременно относительно четырех видимых НКА, образующих оптимальное созвездие, а также принять информацию о текущих эфемеридах каждого НКА этого созвездия.
Способ-прототип включает следующие операции:
1. С помощью бортовой НАП ГНСС на борту КА, находящегося в точке 1 орбиты в момент времени t1 принимают одновременно сигналы от нескольких, минимум - от четырех, НКА ГНСС, находящихся в зоне прямой видимости КА, и измеряют псевдодальности до каждого из четырех НКА:  ,
,  ,
,  ,
,  . Здесь верхний индекс обозначает момент времени измерения, а нижний - номер НКА.
. Здесь верхний индекс обозначает момент времени измерения, а нижний - номер НКА.
2. По результатам измерений четырех псевдодальностей известными методами решают навигационную задачу и на момент времени t1 определяют текущие координаты спутника в точке 1 орбиты X1, Y1, Z1.
3. С помощью НАП ГНСС, размещенной на борту КА, переместившегося в точку 2 орбиты, в момент времени t2 принимают одновременно сигналы от тех же четырех НКА ГНСС, находящихся в зоне прямой видимости КА, и повторно измеряют псевдодальности до каждого из четырех НКА:  ,
,  ,
,  ,
,  .
.
4. По результатам измерений четырех псевдодальностей известными методами решают навигационную задачу и на момент времени t2 определяют текущие координаты спутника в точке 2 орбиты X2, Y2, Z2.
5. Учитывая, что при небольшом интервале времени приращение координаты пропорционально ускорению по этой координате и квадрату интервала времени ускоренного движения (например,  ), находим искомые ускорения по осям:
), находим искомые ускорения по осям:

причем,  ;
;  ;
;  ; gxyz;
; gxyz;  - составляющие гравитационного ускорения и активного ускорения (сопротивление остаточной атмосферы и др.) КА.
- составляющие гравитационного ускорения и активного ускорения (сопротивление остаточной атмосферы и др.) КА.
6. На основе этих выражений вычисляют полное ускорение КА  :
:

7. Отсюда следует искомое гравитационное ускорение:

где активное ускорение  измеряют с помощью бортовых трехосных микроакселерометров.
измеряют с помощью бортовых трехосных микроакселерометров.
Для простоты и наглядности оценку погрешности определения гравитационного ускорения проведем при условии, что активное ускорение пренебрежимо мало ( ), т.е., согласно (4),
), т.е., согласно (4),  . Это условие выполнимо, поскольку ускорение сопротивления остаточной атмосферы составляет 10-5-10-6 м/с2.
. Это условие выполнимо, поскольку ускорение сопротивления остаточной атмосферы составляет 10-5-10-6 м/с2.
Для оценки среднеквадратической погрешности определения ускорения  КА в первой формуле (2) примем, что погрешности определения координат в оба момента времени измерений t1 и t2 одинаковы: σX1=σX2=σX. В этом случае аналогично для всех координатных осей имеем:
КА в первой формуле (2) примем, что погрешности определения координат в оба момента времени измерений t1 и t2 одинаковы: σX1=σX2=σX. В этом случае аналогично для всех координатных осей имеем:

где Δt - интервал, на котором определяется ускорение.
Погрешность определения модуля полного ускорения  (3) на основе соотношений (5) найдем при условии σX=σY=σZ=σXYZ:
(3) на основе соотношений (5) найдем при условии σX=σY=σZ=σXYZ:

Таким образом, погрешность автономного определения гравитационного ускорения на борту КА пропорциональна погрешности определения координат и обратно пропорциональна интервалу между измерениями.
Перед вычислением ошибки определения ускорения (6) по способу-прототипу необходимо учесть, что в самой совершенной модели потенциала ГПЗ EGM2008 размерностью 2159×2159 членов разложения минимальное расстояние между узловыми точками вычислений значений гравитационного ускорения на Земле составляют около 20 км. Поэтому интервал времени в последней формуле выбираем равным Δt≈3 c (за это время КА вдоль орбиты пролетает около 22 км). Задаваясь погрешностью определения координат σXYZ=1 см, находим погрешность определения гравитационного ускорения σg≈550 мГал. Таким образом, прототип имеет низкую точность, которая имеет ограниченное практическое применение в наземной гравиметрии.
С другой стороны, для достижения практически востребованной погрешности измерения гравитационного ускорения около 1 мГал (10-5 м/с2) необходимый интервал между точками измерений, согласно (6), при достижимой погрешности измерения координат в навигационном приемнике σXYZ=1 см составляет 55 с. Соответствующий мерный участок для орбиты геодезического КА высотой 300 км и орбитальной скоростью V0=7,7⋅103 м/с составляет: L=V0⋅Δt≈420 км, что в 20 раз превышает минимальный пространственный интервал, достижимый при использовании известной модели ГПЗ EGM2008.
Наконец, возможностями определения других параметров ГПЗ (например, уклонения отвесной линии и др.) способ-прототип не обладает.
Недостатки способа-прототипа по автономному определению параметров ГПЗ на борту КА заключаются в следующем:
- низкая точность автономного определения текущего гравитационного ускорения КА;
- низкая пространственная плотность измерений;
- невозможность автономного определения других параметров ГПЗ. Технический результат от внедрения изобретения, состоит в повышении точности автономного определения текущего гравитационного ускорения на борту КА, в повышении пространственной плотности автономных измерений гравитационного ускорения КА, а также в возможности автономного определения дополнительных параметров ГПЗ на борту КА, а именно, двух составляющих уклонения отвесной линии (УОЛ): вдоль траектории движения КА и по нормали к его орбите. Способы измерения УОЛ на борту КА в настоящее время неизвестны. Предлагаемый способ реализуется с помощью следующих операций:
1. Принимают на борту КА сигналы нескольких навигационных КА (НКА) ГНСС, составляющих оптимальное созвездие для навигации, решают навигационную задачу по определению текущих координат КА, а затем по изменениям координат КА на некотором интервале времени определяют опорное значение гравитационного ускорения КА.
2. Одновременно дополнительно на борту КА принимают сигналы от НКА, находящихся на трех выделенных направлениях: вблизи зенитного направления в плоскости орбиты, вблизи линии местного горизонта по вектору скорости КА и против него, а также вблизи нормали к плоскости орбиты по обе стороны от нее.
3. Из спектра сигналов, принимаемых на КА со всех выделенных направлений, специальными мерами выделяют соответствующие монохроматические сигналы несущих частот НКА, освобождая их от всех видов фазовой манипуляции.
4. На борту КА по параметрам монохроматических сигналов и параметрам орбит взаимодействующих НКА. предварительно рассчитывают необходимую величину задержки принимаемых сигналов в цифровых управляемых линиях задержки, одни из которых предназначены для измерения гравитационного ускорения, другие - для измерения уклонения отвесных линий в плоскости орбиты КА, а третьи - для измерения уклонения отвесных линий по нормали к орбите КА.
5. Выделяют и оцифровывают доплеровские сигналы из принимаемых монохроматических сигналов, соответствующих всем трем выделенным направлениям приема дополнительных сигналов НКА.
6. Оцифрованные доплеровские сигналы, соответствующих всем трем выделенным направлениям приема дополнительных сигналов НКА, подают на соответствующие три управляемые цифровые линии задержки, величина задержки которых переменна вдоль траектории КА и устанавливается в соответствии с ранее проведенными расчетами (см. п. 4).
7. Прямые и задержанные в цифровых линиях задержки доплеровские сигналы подают на входы трех отдельных цифровых смесителей, где выделяют три независимых сигнала с разностными частотами, которые раздельно несут информацию о гравитационном ускорении КА и о двух составляющих УОЛ.
8. Сигналы с выходов трех цифровых смесителей подают на три соответствующих цифровых измерителя малых частот (периодомеров), где измеряют малые доплеровские частоты, раздельно несущие информацию о гравитационном ускорении КА и о двух составляющих УОЛ.
9. По результатам измерений, снимаемых с трех цифровых измерителей малых частот (периодомеров), вычисляют гравитационное ускорение КА, составляющую УОЛ вдоль траектории КА, а также составляющую УОЛ по нормали к орбите, причем результат вычисления гравитационного ускорения сравнивают с опорным значением, полученным по текущим координатам (см. п. 1).
Обоснование принципов и оценка точности автономного измерения параметров ГПЗ на борту КА в предлагаемом способе
1. Принцип измерения гравитационного ускорения
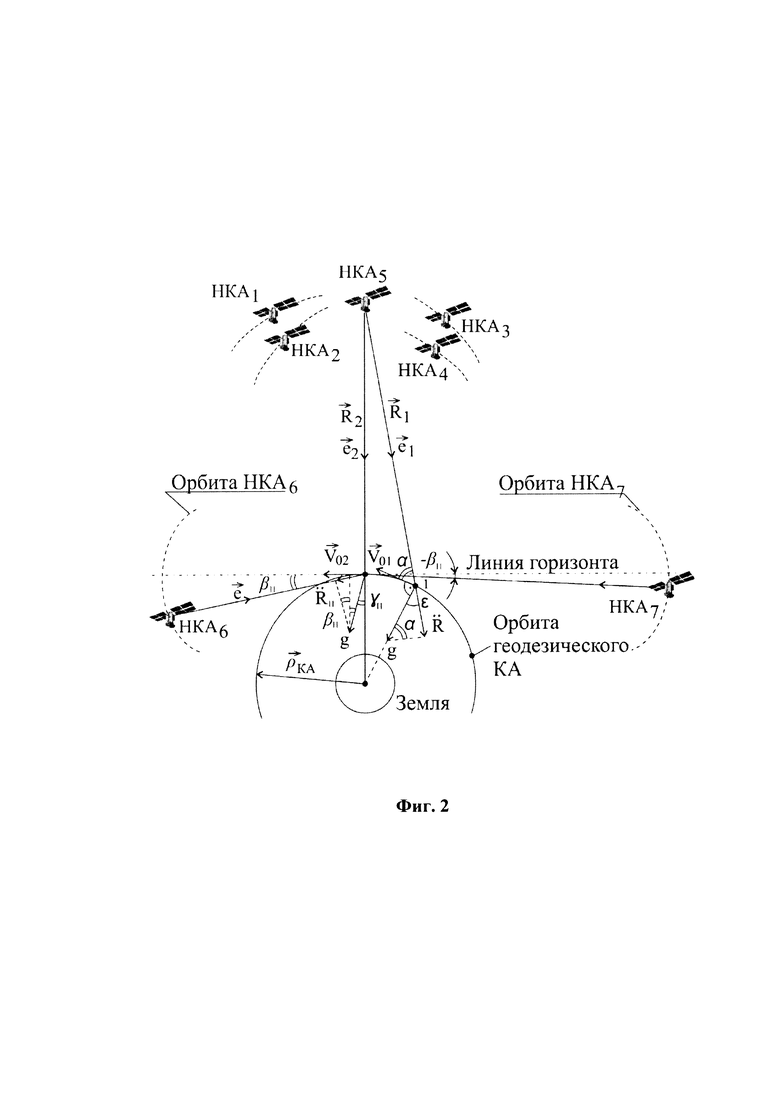
Условимся, что геодезический КА находится низкой круговой околоземной орбите (фиг. 2). Радиус-вектор КА обозначим ρКА, вектор его орбитальной скорости - V0. На более высоких орбитах в гравитационном поле Земли находятся навигационные КА (НКА 1-7), которые излучают навигационные сигналы с длиной волны λ в сторону Земли. В качестве НКА используются средневысотные и геосинхронные КА глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС, GPS, Galileo, BeiDou и др. Определение текущего гравитационного ускорения КА выполняется в несколько последовательных этапов.
Этап 1.1. Определение опорного значения гравитационного ускорения. С помощью оптимального созвездия навигационных КА (НКА 1-4), находящихся в зоне видимости геодезического КА, по результатам измерений четырех псевдодальностей в точках его положения 1 и 2 известными методами решают навигационную задачу и на моменты времени t1, t2 определяют текущие координаты спутника в точке 1 орбиты X1, Y1, Z1, а также в точке 2 орбиты X2, Y2, Z2.
Учитывая, что движение КА на участке орбиты 1-2 равноускоренное, по найденным координатам находят ускорения по осям, полное ускорение КА  и его модуль
и его модуль  :
:
откуда следует выражение для приближенного (опорного) значения искомого гравитационного ускорения КА g:

где активное ускорение  измеряют с помощью бортовых трехосных микроакселерометров.
измеряют с помощью бортовых трехосных микроакселерометров.
Полученное на этом этапе значение гравитационного ускорения не обладает необходимой точностью, однако может служить опорным значением для последующих измерений.
Этап 1.2 - выделение несущей частоты из спектра сигнала. На борту КА принимают сигнал от НКА5, находящегося вблизи плоскости орбиты КА и вблизи зенита в секторе 15-20 градусов. Частота излучаемого сигнала с борта НКА равна ƒ0. Спектр сигнала, излучаемого НКА5, весьма широк, поскольку его фаза на борту НКА подвергается фазовой псевдослучайной манипуляции на 180 градусов. Поэтому такой сигнал напрямую непригоден для доплеровских измерений. В этой связи при приеме сигнала на борту геодезического КА необходимо предпринять меры по выделению из спектра сигнала чистой монохроматической несущей ƒПРМ.
Таких возможностей в НАП имеется несколько [4], но наиболее простая из них заключается в использовании операции умножения фазоманипулированного сигнала на самого себя. Такая операция иногда называется «квадратированием». Действительно, если обозначить принимаемый сигнал в виде [5]:

где b - цифровая последовательность, формируемая в результате сложения по модулю 2 дальномерного кода и навигационного сообщения, то после умножения «сам-на-себя» имеем:

откуда видно, что частота принимаемого сигнала удвоилась, а мешающая фазовая манипуляция на π исчезла.
Единственный отрицательный момент такой операции заключается в снижении уровня сигнала на 30 дБ [4]. Однако это легко парируется незначительным увеличением площади приемной антенны и соответствующим увеличением ее коэффициента усиления, поскольку прием сигнала в данном случае ведется вблизи зенита в достаточно узком секторе, не превышающем 15-20 градусов.
Этап 1.3. Определение необходимого интервала времени задержки двух последовательных измерений доплеровского сдвига частоты принимаемого сигнала, который позже будет реализован в цифровой линии задержки. Для этого вычисляют доплеровские смещения частоты принимаемого сигнала на борту КА FD1, FD2 для двух последовательных моментов времени t1, t2, соответствующим точкам орбиты 1 и 2 вблизи зенита:

где  ,
,  - радиальные скорости КА относительно используемого НКА5.
- радиальные скорости КА относительно используемого НКА5.
Разность этих доплеровских смещений на интервале Δt=t2-t1 выразим через радиальное ускорение КА относительно НКА5:

Ускорение  зависит от расстояния RH до НКА5. Искомое гравитационное ускорение КА g не зависит от этого расстояния и определяется только геоцентрической высотой ρКА. Для приведения этих ускорений к единому расстоянию введем в рассмотрение приведенное к высоте спутника гравитационное ускорение
зависит от расстояния RH до НКА5. Искомое гравитационное ускорение КА g не зависит от этого расстояния и определяется только геоцентрической высотой ρКА. Для приведения этих ускорений к единому расстоянию введем в рассмотрение приведенное к высоте спутника гравитационное ускорение  . Отсюда, согласно рисунку на фиг. 2, имеем:
. Отсюда, согласно рисунку на фиг. 2, имеем:

где α - угол между касательной к орбите и направлением на КА.
Поскольку вблизи зенита RH≈ρH-ρКА, то формула (13) приобретает вид:

Если установить примерно постоянную величину разностного смещения ΔFD, то из соотношения (14) находим планируемый текущий интервал задержки Δt, обеспечивающий примерно постоянное смещение ΔFD вдоль всей трассы полета от момента входа до момента выхода из зоны приема сигнала зенитного навигационного спутника (знак не учитываем, α=90°):

Результаты расчетов интервала задержки между измерениями и длины мерного интервала ΔL=V0⋅Δt при высоте орбиты КА 300 км показывают следующее:
- при ΔFD=50 Гц имеем Δt=3,16 с; ΔL=24,35 км;
- при ΔFD=20 Гц имеем Δt=1,26 с; ΔL≈10 км.
Важно отметить, что при высоте орбиты КА 1000 км (орбита типа КА Гео-ИК) эти характеристики отличаются не более, чем на 5-10%.
Таким образом, планирование полета КА показало, что при использовании зенитного НКА при заданном доплеровском смещении около 20 Гц на интервале задержки между измерениями Δt=1,26 с пространственная дискретность измерений составляет около 10 км и, соответственно, плотность - 40 измерений на 400 км, что в 40 раз выше, чем в прототипе.
Этап 1.4 - Оцифровка доплеровского смещения частоты двух сигналов и цифровая задержка одного из них. Установим протяженность зоны приема сигнала вблизи зенита не более 4000 км. Тогда на расстоянии 2000 км до точки траверза с НКА5 угол места α ≥ 84°. При таком угле места доплеровский сдвиг несущей, согласно формуле (11), не превысит 3,35 кГц.
Доплеровское смещение частоты принимаемого сигнала FD1, определяемое соотношением (11) на момент t1, преобразуют в цифровую форму с помощью аналогово-цифрового преобразователя (АЦП) с тактовой частотой ƒТ. Тактовая частота создается на основе высокостабильной частоты бортового стандарта частоты. Относительная погрешность дискретизации при ƒТ=20 ГГц (что вполне достижимо для современной цифровой техники) и FD1 ≤ 5 кГц не превысит величины FD1/ƒТ=2,5⋅10-7.
Доплеровский сигнал с частотой FD1 в цифровой форме подают на переменную цифровую линию задержки (регистр сдвига), где его задерживают на интервал времени задержки Δtз, равный заранее вычисленному интервалу времени перемещения КА из точки 1 в точку 2 орбиты (13), т.е. Δtз=Δt.
Доплеровское смещение частоты принимаемого сигнала FD2, определяемое соотношением (12) на момент t2, с помощью аналогово-цифрового преобразователя (АЦП) с тактовой частотой ƒТ также преобразуют в цифровую форму. Относительная погрешность дискретизации - аналогичная погрешность дискретизации на частоте FD1.
Этап 1.5. Цифровое измерение разностного доплеровского смещения. Два цифровых сигнала - задержанный на выходе линии задержки сигнал с частотой FD1 и сигнал в реальном времени с частотой FD2 подают на входы цифрового смесителя и выделяют цифровой сигнал разностной частоты, которая определяется соотношением (15) при условии Δt=Δtз:

Далее измеряют частоту разностного сигнала ΔFD, величина которой на выбранном интервале времени задержки составляет около 20 Гц. Измерения малой частоты выполняют с помощью периодомера на основе использования бортового источника высокостабильных по частоте счетных импульсов.
Период колебания, соответствующий доплеровскому смещению ΔFD≈20 Гц составляет около ΔTD=1/FD≈5⋅10-2 с. Поэтому с помощью счетных импульсов, поступающих от источника высокостабильных импульсов с частотой Fсч=2⋅1010 Гц и соответствующим периодом следования δТсч=0,5⋅10-10 с заданные интервалы можно измерить с относительной погрешностью 10-9. С погрешностью такого же порядка определяется искомая разностная частота (16): δTсч/TD=δFD/FD≈10-9.
Этап 1.6. Вычисляют искомое гравитационное ускорение КА из формулы (17) по результатам цифровых измерений разностного доплеровского смещения ΔFD:

Полученное значение для проверки сравнивают с опорным значением ускорения (9), полученным координатным способом.
2. Принцип измерения продольной составляющей уклонения отвесной линии относительно траектории КА
Этап 2.1 - Прием сигналов и выделение несущей частоты из спектра сигнала. Для измерения продольной составляющей уклонения отвесной линии (УОЛ) на борту геодезического КА выполним прием сигналов НКА6 и НКА7, находящихся вблизи линии местного горизонта КА (фиг. 2). Выделение монохроматической несущей из спектра принимаемого сигнала выполняют одним из известных методов - также, как и при измерении гравитационного ускорения (этап 1.2). Наиболее простой метод заключается в использовании операции умножения фазоманипулированного сигнала на самого себя. Такая операция называется «квадратированием».
Этап 2.2. Определение необходимого интервала времени задержки двух последовательных измерений доплеровского сдвига частоты принимаемого сигнала, который позже будет реализован в цифровой линии задержки. Как и в предыдущем случае определения гравитационного ускорения, определим разность доплеровских смещений на интервале Δt=t2-t1 по формуле (13). Учтем, что в рассматриваемом случае угол места  НКА6 небольшой и находится в плоскости орбиты. Установим, что его величина изменяется в диапазоне от -15 до +15 градусов.
НКА6 небольшой и находится в плоскости орбиты. Установим, что его величина изменяется в диапазоне от -15 до +15 градусов.
Радиальное ускорение КА относительно НКА6 и НКА7, спроектированное на радиолинию приема сигнала от обоих спутников (см. фиг. 2), определится по аналогии с формулой (14) и отличается для двух НКА лишь знаком угла  (здесь его для упрощения изложения не учитываем):
(здесь его для упрощения изложения не учитываем):

где  - составляющая УОЛ в плоскости орбиты КА. Эта величина незначительная и достигает до 30-40 угловых секунд (около 2⋅10-4 рад) над горной местностью.
- составляющая УОЛ в плоскости орбиты КА. Эта величина незначительная и достигает до 30-40 угловых секунд (около 2⋅10-4 рад) над горной местностью.
В результате формула для приращения доплеровского смещения частоты для НКА6 после разложения в ряд по малым параметрам  ,
,  принимает вид:
принимает вид:

где учтено, что  .
.
Оценку величины полученных слагаемых определим при следующих условиях: радиус-вектор орбиты КА ρКА=6,7⋅106 м; радиус-вектор орбиты НКА ГЛОНАСС ρH=25,5⋅106 м; Δt=25 с; ΔL≈200 км (соответствует проекту CRACE); λ≈0,2 м;  ;
;  . В результате имеем сумму двух слагаемых, определяемых независимыми аргументами
. В результате имеем сумму двух слагаемых, определяемых независимыми аргументами  и
и  :
:

Из первого слагаемого формулы (21) нетрудно определить, что при  Гц величина требуемого интервала, в формуле (20) на котором оперативно определяется радиальное ускорение
Гц величина требуемого интервала, в формуле (20) на котором оперативно определяется радиальное ускорение  , находится примерно в пределах Δt=(4-25)c. При высоте орбиты 300 км этому интервалу времени соответствует длина мерного интервала вдоль орбиты (60-200) км. Т.е. в данном случае плотность измерений УОЛ составляет одно измерение на 60-200 км.
, находится примерно в пределах Δt=(4-25)c. При высоте орбиты 300 км этому интервалу времени соответствует длина мерного интервала вдоль орбиты (60-200) км. Т.е. в данном случае плотность измерений УОЛ составляет одно измерение на 60-200 км.
Для повышения плотности измерений возможно проведение одновременных измерений по нескольким спутникам, находящихся вблизи линии местного горизонта КА (см. фиг. 2). При допустимом секторе угла места НКА  от -15 до +15 градусов это вполне возможно, поскольку линия местного горизонта непрерывно сканирует пространство и в этом секторе могут быть одновременно несколько видимых НКА. В этом случае мерные интервалы по соседним спутникам накладываются друг на друга, повышая тем самым плотность измерений.
от -15 до +15 градусов это вполне возможно, поскольку линия местного горизонта непрерывно сканирует пространство и в этом секторе могут быть одновременно несколько видимых НКА. В этом случае мерные интервалы по соседним спутникам накладываются друг на друга, повышая тем самым плотность измерений.
Поскольку при интервалах задержки Δt=(4-25) с величина доплеровского сдвига больше 1 Гц, то для его измерения вполне может быть использован рассмотренный выше метод периодомера.
Этап 2.3. Оцифровка доплеровского смещения частоты и цифровая задержка одного из сигналов.
Доплеровское смещение частоты принимаемого сигнала FD1, определяемое соотношением (11) на момент преобразуют в цифровую форму с помощью аналогово-цифрового преобразователя (АЦП) с тактовой частотой ƒТ. Далее доплеровский сигнал с частотой FD1 в цифровой форме подают на переменную цифровую линию задержки (регистр сдвига), где его задерживают на интервал времени задержки Δtз ≤ 25 с, равный интервалу, для которого рассчитано доплеровское смещение (21).
Доплеровское смещение частоты принимаемого сигнала FD2, определяемое соотношением (12) на момент t2, с помощью аналогово-цифрового преобразователя (АЦП) с тактовой частотой ƒТ также преобразуют в цифровую форму.
Этап 2.4. Цифровое измерение разностного доплеровского смещения. Два цифровых сигнала - задержанный на выходе линии задержки сигнал с частотой FD1 и сигнал в реальном времени с частотой FD2 подают на входы цифрового смесителя и выделяют сигнал разностной частоты, которая определяется соотношением (20).
Далее измеряют частоту разностного сигнала  , величина которой на выбранном интервале времени задержки 25 секунд составляет, как показано выше, величину более 6,6 Гц. Измерения малой частоты выполняют с помощью периодомера на основе использования бортового источника высокостабильных по частоте счетных импульсов.
, величина которой на выбранном интервале времени задержки 25 секунд составляет, как показано выше, величину более 6,6 Гц. Измерения малой частоты выполняют с помощью периодомера на основе использования бортового источника высокостабильных по частоте счетных импульсов.
Период колебания, соответствующий доплеровскому смещению ΔFD≈6,6 Гц составляет около ΔTD=1/FD≈0,15 с. Поэтому с помощью счетных импульсов, поступающих от источника высокостабильных импульсов с частотой Fсч=2⋅1010 Гц и соответствующим периодом следования δТсч=0,5⋅10-10 с заданные интервалы можно измерить с относительной погрешностью 10-9. С погрешностью такого же порядка определяется искомая разностная частота (16): δTсч/TD=δFD/FD≈10-9.
Этап 2.5. Вычисление искомого УОЛ в плоскости орбиты. По результатам цифровых измерений разностного доплеровского смещения  из формулы (20), используя известное выражение
из формулы (20), используя известное выражение  (μe - геоцентрическая гравитационная постоянная), находим:
(μe - геоцентрическая гравитационная постоянная), находим:

Формула одинаково применима для случаев использования сигналов НКА6 и НКА7, находящихся вблизи линии горизонта впереди и позади КА. В ней часть параметров задана, часть измерена ( ), а часть вычислена по известным эфемеридам НКА6, НКА7 и геодезического КА (
), а часть вычислена по известным эфемеридам НКА6, НКА7 и геодезического КА ( ).
).
Кроме НКА6 и НКА7 для измерений могут использоваться и другие НКА, попадающие в сектор угла  размером от -15 до +15 градусов относительно линии местного горизонта.
размером от -15 до +15 градусов относительно линии местного горизонта.
3. Принцип измерения составляющей уклонения отвесной линии, ортогональной плоскости орбиты КА
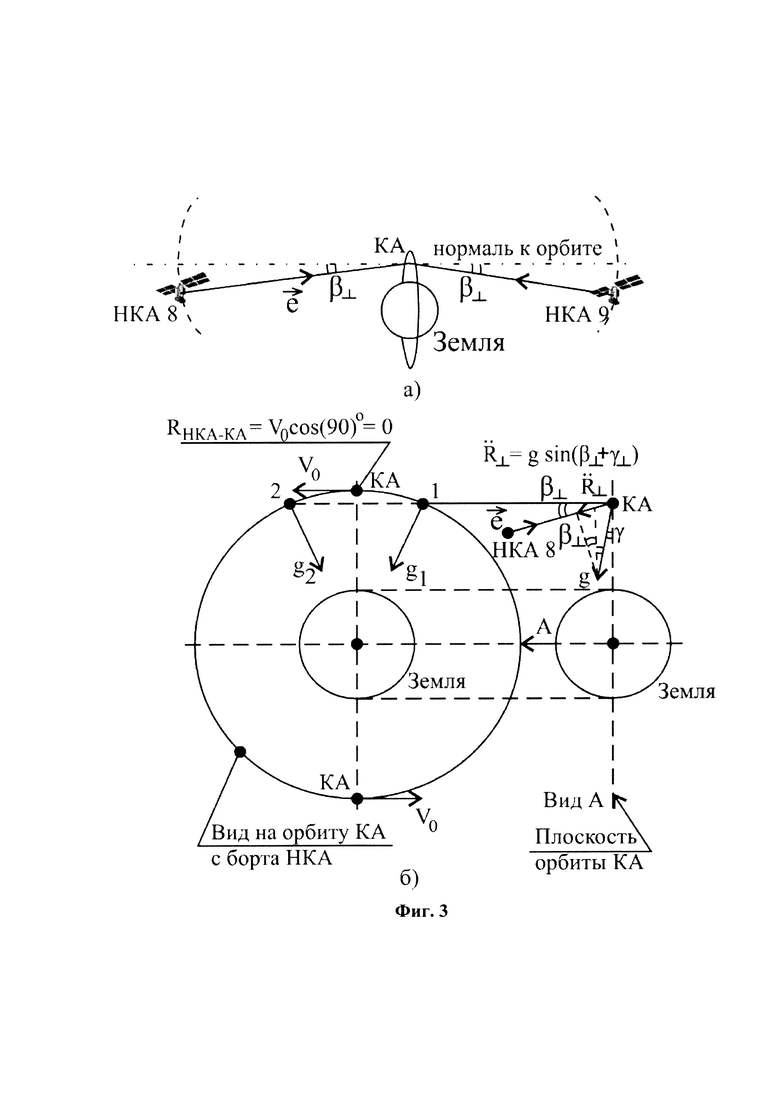
Этап 3.1. - Прием сигналов и выделение несущей частоты из спектра сигнала. Для измерения продольной составляющей уклонения отвесной линии (УОЛ) на борту геодезического КА выполним прием сигналов НКА8 и НКА9, находящихся вблизи нормали к плоскости орбиты геодезического КА (фиг. 3). Выделение монохроматической несущей из спектра принимаемого сигнала выполняют одним из известных методов - также, как и при измерении гравитационного ускорения (этап 1.2). Наиболее простой метод заключается в использовании операции умножения фазоманипулированного сигнала на самого себя. Такая операция называется «квадратированием».
Этап 3.2. Определение необходимого интервала времени задержки двух последовательных измерений доплеровского сдвига частоты принимаемого сигнала, который позже будет реализован в цифровой линии задержки.
Как и в предыдущем случае определения УОЛ в плоскости орбиты, определим разность доплеровских смещений на интервале Δt=t2-t1 по формуле (13) для случая приема сигналов НКА8. Учтем, что в рассматриваемом случае угол места  НКА8 изменяется в диапазоне от -15 до +15 градусов.
НКА8 изменяется в диапазоне от -15 до +15 градусов.
Радиальное ускорение КА  относительно НКА8, перпендикулярное плоскости орбиты геодезического КА и спроектированное на радиолинию приема сигнала от НКА8 (см. фиг. 3б), определится по аналогии с формулой (19):
относительно НКА8, перпендикулярное плоскости орбиты геодезического КА и спроектированное на радиолинию приема сигнала от НКА8 (см. фиг. 3б), определится по аналогии с формулой (19):

где  - поперечная составляющая УОЛ относительно плоскости орбиты КА. Эта величина также незначительная и достигает до 30-40 угловых секунд (около 2⋅10-4 рад) над горной местностью.
- поперечная составляющая УОЛ относительно плоскости орбиты КА. Эта величина также незначительная и достигает до 30-40 угловых секунд (около 2⋅10-4 рад) над горной местностью.
В результате формула для приращения доплеровского смещения для НКА 8 после разложения в ряд по малым параметрам  ,
,  принимает вид:
принимает вид:

Оценка величины полученных слагаемых аналогична случаю определения УОЛ в плоскости орбиты (см. оценку ф-лы (20)). Из формулы (20) нетрудно также определить, что при  Гц величина требуемого интервала, на котором оперативно определяется радиальное ускорение
Гц величина требуемого интервала, на котором оперативно определяется радиальное ускорение  , находится примерно в пределах Δt=(4-25)с.При высоте орбиты 300 км интервалу в 4 секунды соответствует длина мерного интервала вдоль орбиты около 60-200 км, а плотность измерений составляющей УОЛ
, находится примерно в пределах Δt=(4-25)с.При высоте орбиты 300 км интервалу в 4 секунды соответствует длина мерного интервала вдоль орбиты около 60-200 км, а плотность измерений составляющей УОЛ  составляет одно измерение на 60-200 км.
составляет одно измерение на 60-200 км.
Для повышения плотности измерений возможно проведение одновременных измерений по нескольким спутникам, находящихся вблизи нормали к плоскости орбиты КА (см. фиг. 3). При допустимом секторе угла места НКА  от -15 до +15 градусов это вполне возможно, поскольку нормаль к плоскости орбиты при перемещении спутника по орбите непрерывно сканирует по пространству и в этом секторе могут быть одновременно несколько видимых НКА. В этом случае мерные интервалы по соседним спутникам накладываются друг на друга, повышая тем самым плотность измерений.
от -15 до +15 градусов это вполне возможно, поскольку нормаль к плоскости орбиты при перемещении спутника по орбите непрерывно сканирует по пространству и в этом секторе могут быть одновременно несколько видимых НКА. В этом случае мерные интервалы по соседним спутникам накладываются друг на друга, повышая тем самым плотность измерений.
Поскольку при интервалах задержки Δtз=(4-25) с величина доплеровского сдвига частоты, определяемая формулой (23), больше 1 Гц, то для его измерения вполне может быть использован метод периодомера.
Этап 3.3 аналогичен Этапу 2.3: Оцифровка доплеровского смещения частоты двух сигналов и цифровая задержка одного из сигналов на время Δtз ≤ 25 с.
Этап 3.4 аналогичен Этапу 2.4: Цифровое измерение разностного доплеровского смещения  .
.
Этап 3.5. Вычисление искомого УОЛ, ортогонального плоскости орбиты. По результатам цифровых измерений разностного доплеровского смещения  из формулы (23) находим:
из формулы (23) находим:

Формула одинаково применима для случаев использования сигналов НКА8 и НКА9, находящихся слева и справа от плоскости орбиты КА вблизи нормали к ней. В ней часть параметров задана, часть измерена , а часть вычислена по известным эфемеридам НКА8, НКА9 и геодезического КА
, а часть вычислена по известным эфемеридам НКА8, НКА9 и геодезического КА  .
.
Кроме НКА8 и НКА9 для измерений УОЛ могут использоваться и другие НКА, попадающие в сектор угла  размером от -15 до +15 градусов относительно нормали к плоскости орбиты КА.
размером от -15 до +15 градусов относительно нормали к плоскости орбиты КА.
Следует также отметить, что на борту КА измерения гравитационного ускорения по принимаемым сигналам от НКА5, а также обеих составляющих УОЛ по сигналам НКА6, 7, 8, 9 вьшолняются одновременно.
4. Оценка погрешности определения гравитационного ускорения и составляющих УОЛ предлагаемым способом.
4.1. Оценку погрешности определения гравитационного ускорения проведем на основе формулы (18) для измерений вблизи зенита при α≈90°.
Путем дифференцирования этой формулы находим полную относительную среднеквадратическую погрешность определения искомого ускорения:

Для условий радиотехнических измерений по НКА, выполняемых с помощью бортовых НАЛ ГНСС, среднеквадратические относительные ошибки определения всех входящих в эту формулу величин для геодезических спутников не превышают 10-8, их суммарное относительное СКО не превышает 10-7. Поэтому абсолютная погрешность определения гравитационного ускорения КА на высоте 300 км в зените составляет:  , что существенно меньше (примерно в 4000 раз), чем в прототипе (300 МГал).
, что существенно меньше (примерно в 4000 раз), чем в прототипе (300 МГал).
Таким образом, заявленный технический результат от внедрения изобретения, состоящий в повышении точности прямого измерения гравитационного ускорения на борту КА, достигнут.Погрешность прямых измерений снижена более, чем на 3 порядка (в 4000 раз).
4.2. Оценка дискретности (детальности) измерения гравитационного ускорения на борту КА. При интервале задержки между измерениями, реализуемой с помощью цифровой линии задержки, Δtз=1,26 с достижимая пространственная дискретность измерений составляет около 10 км и, соответственно, плотность измерений - 40 измерений на 400 км, что в 40 раз выше, чем в прототипе. Таким образом, выигрыш в дискретности в предлагаемом способе составляет почти 40 раз.
4.3. Оценка точности измерения составляющих УОЛ.
Как показано в выражении (21), вторая часть доплеровского смещения (20), в которой содержится информация об искомой составляющей УОЛ, значительно меньше первой, неинформационной, но которая составляет единицы Герц. Именно первая часть обеспечивает возможность использования для измерений метода периодомера и частоту съема информации несколько раз в секунду.
Для вычислений представим формулу (20) в виде:

где  ;
;  - вычисляемое доплеровское смещение, вызванное отклонением НКА от линии местного горизонта. Относительная погрешность вычисления этого смещения не превышает 10-7, что определяется точностью определения всех входящих в эту формулу величин, в том числе точностью знания орбиты КА и точностью эфемерид НКА ГНСС.
- вычисляемое доплеровское смещение, вызванное отклонением НКА от линии местного горизонта. Относительная погрешность вычисления этого смещения не превышает 10-7, что определяется точностью определения всех входящих в эту формулу величин, в том числе точностью знания орбиты КА и точностью эфемерид НКА ГНСС.
Отсюда следует выражение для искомой относительной погрешности определения УОЛ по результатам измерений и вычислений:

Как показано в пояснениях к Этапу 2.4, относительная погрешность определения малого частотного сдвига с помощью периодомера с использованием высокостабильных счетных импульсов составляет 10-8 Гц. Согласно примера, представленного в выражении (21), величина частотного смещения, вызванного влиянием УОЛ, составляет около 6⋅10-3 Гц. Поэтому относительная погрешность определения УОЛ составит:
При величине УОЛ  (2⋅10-4 рад) абсолютное СКО определения обеих его составляющих составит:
(2⋅10-4 рад) абсолютное СКО определения обеих его составляющих составит:  . Эта погрешность на 3-4 порядка меньше, чем погрешность лучших наземных отечественных и зарубежных астрономических измерителей УОЛ на зенитных телескопах, работающих через атмосферу (0,2-0,01 угл. сек).
. Эта погрешность на 3-4 порядка меньше, чем погрешность лучших наземных отечественных и зарубежных астрономических измерителей УОЛ на зенитных телескопах, работающих через атмосферу (0,2-0,01 угл. сек).
Таким образом, заявленный технический результат от внедрения изобретения достигнут:
- точность измерения гравитационного ускорения на борту КА повышена более, чем на 3 порядка (в 4000 раз);
- дискретность (детальность) измерений повышена почти 40 раз;
- предложен способ автономного измерения составляющих УОЛ на борту КА в направлениях вдоль и поперек орбитального движения КА;
- погрешность измерения составляющих УОЛ на 3-4 порядка меньше, чем в наземных астрономических измерителях УОЛ.
Источники информации
1. М. Doner. Le systeme DORIS (Космические системы определения местоположения и навигации), Toulouse, March 1989, CNES (Французский Национальный Центр космических исследований).
2. Интернет-ресурс: конспект лекций по курсу «Космическая геодезия и геодинамика» для студентов специальности 300500 «Космическая геодезия», разд. 2.3.5.
3. Информационные технологии в радиотехнических системах: учеб. пособие / под ред. И.Ф. Федорова. - Изд. 3-е перераб. и доп. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2011. - 846 с.
4. Антонович К.М. Использование спутниковых радионавигационных систем в геодезии [Текст]. В 2 т.Т. 1. Монография, ГОУ ВПО «Сибирская государственная геодезическая академия». - М.: ФГУП «Картгеоцентр», 2005. - 334 с: ил.
5. ГЛОНАСС. Принципы построения и функционирования / под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп.М.: Радиотехника, 2010. 800 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения гравитационного ускорения космического аппарата | 2021 |
|
RU2768557C1 |
| АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2727584C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФЕМЕРИДНОЙ ИНФОРМАЦИИ В АППАРАТУРЕ ПОТРЕБИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460970C1 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ОПЕРАТИВНОЙ СИНХРОНИЗАЦИИ МЕР ВРЕМЕНИ И ЧАСТОТЫ, РАЗМЕЩЕННЫХ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1995 |
|
RU2109315C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
Изобретение относится к способам измерения параметров гравитационного поля Земли (ГПЗ). Сущность: принимают на борту космического аппарата (КА) сигналы от навигационных КА (НКА) глобальных навигационных спутниковых систем. Определяют текущие координаты КА и опорное значение гравитационного ускорения КА. Дополнительно на борту КА принимают три сигнала от НКА, размещенных относительно КА вблизи трех выделенных направлений: зенитного направления в плоскости орбиты, линии местного горизонта по ходу и против хода орбитального движения КА, а также нормали к плоскости орбиты КА с обеих ее сторон. Из всех трех дополнительных сигналов выделяют монохроматическую несущую, освобождая ее от всех видов модуляции. По параметрам трех принимаемых дополнительных сигналов, а также по текущим орбитальным параметрам КА и НКА предварительно вычисляют необходимую задержку сигналов для обеспечения регулирования цифровой задержки этих сигналов при измерениях параметров ГПЗ. Выделяют сигналы доплеровской частоты из всех трех дополнительно принятых монохроматических сигналов, оцифровывают их и подают на три независимые цифровые линии задержки с установленной расчетной задержкой для каждой точки орбиты КА. Прямой и задержанный доплеровские сигналы, соответствующие трем принятым дополнительным сигналам, подают на входы трех независимых цифровых смесителей. Затем три сигнала с разностной частотой с выхода смесителей подают на три измерителя малых частот. По результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА с зенитного направления, вычисляют текущее значение гравитационного ускорения КА и сравнивают его с опорным значением. По результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА вдоль направления местного горизонта, вычисляют текущую составляющую уклонения отвесной линии ГПЗ в плоскости орбиты КА. По результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА вдоль нормали к орбите, вычисляют текущую составляющую уклонения отвесной линии ГПЗ по нормали к плоскости орбиты КА. Технический результат: повышение точности измерения параметров ГПЗ. 2 з.п. ф-лы, 3 ил.
1. Способ автономного измерения параметров гравитационного поля Земли (ГПЗ), заключающийся в приеме сигналов от навигационных космических аппаратов (НКА) глобальных навигационных спутниковых систем, определении текущих координат космических аппаратов (КА) для определения опорного значения гравитационного ускорения КА, отличающийся тем, что на борту КА дополнительно принимают три сигнала от НКА, размещенных относительно КА вблизи трех выделенных направлений: зенитного направления в плоскости орбиты, линии местного горизонта по ходу и против хода орбитального движения КА, а также нормали к плоскости орбиты КА с обеих ее сторон; из всех трех дополнительных сигналов выделяют монохроматическую несущую, освобождая ее от всех видов модуляции; по параметрам трех принимаемых дополнительных сигналов, а также по текущим орбитальным параметрам КА и НКА предварительно вычисляют необходимую задержку сигналов для обеспечения регулирования цифровой задержки этих сигналов при измерениях параметров ГПЗ; выделяют сигналы доплеровской частоты из всех трех дополнительно принятых монохроматических сигналов, оцифровывают их и подают на три независимые цифровые линии задержки с установленной расчетной задержкой для каждой точки орбиты КА; прямой и задержанный доплеровские сигналы, соответствующие трем принятым дополнительным сигналам, подают на входы трех независимых цифровых смесителей, а затем три сигнала с разностной частотой с выхода смесителей подают на три измерителя малых частот; по результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА с зенитного направления, вычисляют текущее значение гравитационного ускорения КА и сравнивают его с опорным значением; по результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА вдоль направления местного горизонта, вычисляют текущую составляющую уклонения отвесной линии ГПЗ в плоскости орбиты КА; по результату измерения малой частоты, соответствующей принимаемому дополнительному сигналу от НКА вдоль нормали к орбите, вычисляют текущую составляющую уклонения отвесной линии ГПЗ по нормали к плоскости орбиты КА.
2. Способ по п. 1, отличающийся тем, что в каждом выделенном направлении приема дополнительных сигналов принимают и независимо измеряют параметры сигналов от нескольких НКА одновременно, причем результаты независимых дополнительных вычислений текущих параметров ГПЗ вдоль орбиты используются для повышения точности и повышения пространственной плотности измерений.
3. Способ по п. 1, отличающийся тем, что в качестве удаленных опорных источников сигналов используют сигналы других навигационных систем на высоких орбитах, а также сигналы спутниковых систем связи.
| Конусное соединение съемных буровых коронок со штангами | 1949 |
|
SU83239A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ | 2003 |
|
RU2251127C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АНОМАЛИЙ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ ПРИ ПРОВЕДЕНИИ ЛАБОРАТОРНЫХ РАБОТ | 2005 |
|
RU2308744C2 |

