Изобретение относится к области вторичной обработки радиолокационных (РЛ) сигналов и может быть использовано для обеспечения бессрывного сопровождения вертолета в импульсно-доплеровской радиолокационной станции (РЛС).
Известен способ сопровождения воздушной цели, который может быть применен и для сопровождения вертолета по отражениям сигналов от его фюзеляжа и заключающийся в отслеживании вертолета на основе процедуры оптимальной линейной многомерной дискретной калмановской фильтрации по дальности, скорости и ускорению [1].
Недостатком данного способа сопровождения является невозможность с его помощью обеспечить бессрывное сопровождение вертолета в случае отсутствия приращения доплеровской частоты, обусловленное скоростью сближения вертолета с РЛС.
Известен способ сопровождения вертолета в импульсно-доплеровской РЛС, заключающийся в том, что сигнал, отраженный от вертолета на промежуточной частоте в импульсно-доплеровской РЛС подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от фюзеляжа вертолета и вращающихся лопастей его несущего винта, в каждый k-й (где k=1,…,К; К - общее количество отсчетов дискретного времени) дискретный момент времени определяется отсчет доплеровской частоты спектральной составляющей с максимальной амплитудой Аф, превысившей первый порог U1 и соответствующий отражениям сигнала от фюзеляжа вертолета, осуществляется фильтрация в первом фильтре сопровождения полученных отсчетов Fф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в результате чего на выходе первого фильтра сопровождения формируется оценка  доплеровской частоты, одновременно в каждый k-й дискретный момент времени определяются отсчеты Fi, (где i=1,…,I; I - общее количество амплитуд спектральных составляющих, превысивших второй порог U2), соответствующие отражениям сигнала от лопастей несущего винта вертолета за исключением спектральной составляющей с амплитудой Аф и соответствующей отражениям сигнала от фюзеляжа вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, вычисляется один отсчет Fэ доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка
доплеровской частоты, одновременно в каждый k-й дискретный момент времени определяются отсчеты Fi, (где i=1,…,I; I - общее количество амплитуд спектральных составляющих, превысивших второй порог U2), соответствующие отражениям сигнала от лопастей несущего винта вертолета за исключением спектральной составляющей с амплитудой Аф и соответствующей отражениям сигнала от фюзеляжа вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, вычисляется один отсчет Fэ доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка  доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от его фюзеляжа, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка
доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от его фюзеляжа, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка  доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта [2].
доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта [2].
Недостатком данного способа сопровождения является невозможность с его помощью обеспечить бессрывное сопровождение вертолета. Это обусловлено тем, что во-первых, в случае отсутствия или незначительного приращения доплеровской частоты, обусловленной скоростью сближения вертолета с РЛС, во-вторых, ввиду флюктуаций сигнала, отраженного от фюзеляжа вертолета и вращающихся лопастей его несущего винта, а также при большом удалении вертолета от облучаемой его РЛС, возможны ситуации, когда амплитуда Аф спектральной составляющей сигнала, отраженного от фюзеляжа вертолета, и амплитуды спектральных составляющих сигнала, отраженного от вращающихся лопастей несущего винта вертолета, не будут превышать установленные пороги соответственно U1 и U2, что приведет также к срыву сопровождения вертолета.
Цель изобретения - обеспечить бессрывное сопровождение вертолета в импульсно-доплеровской радиолокационной станции.
Для достижения цели в способе сопровождения вертолета в импульсно-доплеровской РЛС, заключающимся в том, что сигнал, отраженный от вертолета на промежуточной частоте в импульсно-доплеровской РЛС подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от фюзеляжа вертолета, подвижных частей его силовой установки и вращающихся лопастей его несущего винта, в каждый k-й (где k=1…К, К - общее количество отсчетов дискретного времени) дискретный момент времени определяется отсчет Fф доплеровской частоты спектральной составляющей с максимальной амплитудой Аф, превысившей первый порог U1 и соответствующий отражениям сигнала от фюзеляжа вертолета, осуществляется фильтрация в первом фильтре сопровождения полученных отсчетов Fф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в результате чего на выходе первого фильтра сопровождения формируется оценка  доплеровской частоты, дополнительно одновременно с определением отсчетов Fф доплеровских частот в каждый k-й дискретный момент времени определяются отсчеты Fcy спектральной составляющей с амплитудой Асу, превысившей второй порог U2, но не превысившей первый порог U1 и соответствующие отражениям сигнала от подвижных частей силовой установки вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fcy доплеровских частот, соответствующих отражениям сигнала от подвижных частей силовой установки вертолета, определяются отсчеты доплеровских частот Fi (где i=1,…,I; I - общее количество амплитуд спектральных составляющих, обусловленных отражениями РЛ сигнала от вращающихся лопастей несущего винта вертолета), превысивших третий порог U3, но не превысивших первый U1 и второй U2, за исключением спектральных составляющих с амплитудами Аф и Асу, при этом величина третьего порога U3 в m раз меньше величины второго порога U2, вычисляется один отсчет Fэ доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация в третьем фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка
доплеровской частоты, дополнительно одновременно с определением отсчетов Fф доплеровских частот в каждый k-й дискретный момент времени определяются отсчеты Fcy спектральной составляющей с амплитудой Асу, превысившей второй порог U2, но не превысившей первый порог U1 и соответствующие отражениям сигнала от подвижных частей силовой установки вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fcy доплеровских частот, соответствующих отражениям сигнала от подвижных частей силовой установки вертолета, определяются отсчеты доплеровских частот Fi (где i=1,…,I; I - общее количество амплитуд спектральных составляющих, обусловленных отражениями РЛ сигнала от вращающихся лопастей несущего винта вертолета), превысивших третий порог U3, но не превысивших первый U1 и второй U2, за исключением спектральных составляющих с амплитудами Аф и Асу, при этом величина третьего порога U3 в m раз меньше величины второго порога U2, вычисляется один отсчет Fэ доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация в третьем фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка  доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от фюзеляжа вертолета, при наличии отсчетов Fcy доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка
доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от фюзеляжа вертолета, при наличии отсчетов Fcy доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка  доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших третий порог U3 и не превысивших первый U1 и второй U2 пороги на выходе формируется оценка
доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших третий порог U3 и не превысивших первый U1 и второй U2 пороги на выходе формируется оценка  доплеровской частоты с выхода третьего фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
доплеровской частоты с выхода третьего фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
Новыми признаками, обладающими существенными отличиями, являются.
1. Логика трехпорогового формирования отсчетов доплеровских частот в амплитудно-частотном спектре радиолокационного сигнала, отраженного от фюзеляжа вертолета, его силовой установки и вращающихся частей несущего винта, с последующей их фильтрацией в соответствующих фильтрах.
2. Логика выбора оценки доплеровской частоты в зависимости от результата анализа трехпорогового формирования отсчетов доплеровских частот в амплитудно-частотном спектре радиолокационного сигнала, отраженного от фюзеляжа вертолета, его силовой установки и вращающихся частей несущего винта.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит обеспечить бессрывное сопровождение вертолета в импульсно-доплеровской РЛС.
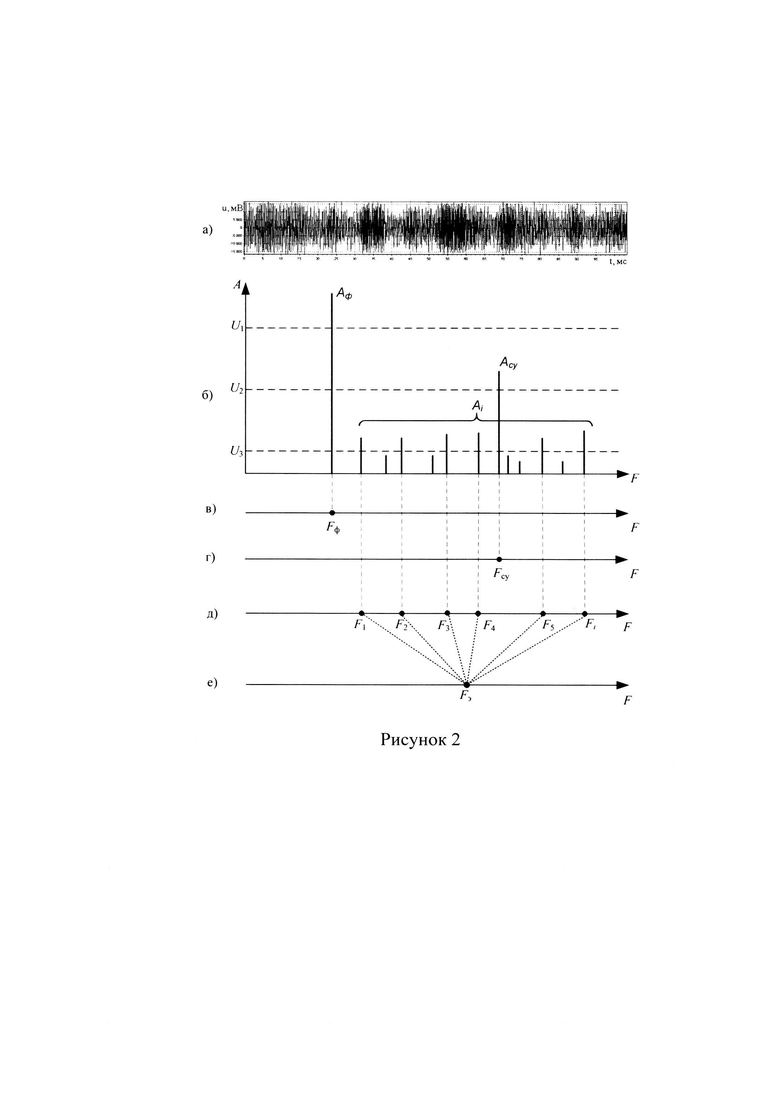
На фиг. 1 приведена блок-схема, поясняющая предлагаемый способ сопровождения вертолета в импульсно-доплеровской РЛС, на фиг. 2 (а, б, в, г, д, е) - эпюры, поясняющие процесс бессрывного сопровождения вертолета.
Способ сопровождения вертолета в импульсно-доплеровской РЛС реализуется следующим образом.
На вход блока 1 БПФ (фиг. 1) на промежуточной частоте с выхода приемника РЛС поступает сигнал S(t) (фиг. 2а), отраженный от вертолета, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f) (фиг. 2б), составляющие которого обусловлены отражениями сигнала от фюзеляжа вертолета с амплитудой Аф, подвижных частей его силовой установки с амплитудой Асу и вращающихся лопастей его несущего винта с амплитудами Ai.
С выхода блока 1 БПФ (фиг. 1) на первые входы пороговых устройств 2, 3 и 4 поступают соответственно значения амплитуд Аф, Асу и Ai, а на их вторые входы - соответственно значения порогов U1, U2 и U3. Причем значение порога U2 в n раз меньше значения порога U1, а значение U3 в m раз меньше значения порога U2.
В каждый k-й дискретный момент времени на выходе первого порогового устройства 2 определяется отсчет Fф доплеровской частоты (фиг. 2в) спектральной составляющей с амплитудой Аф, превысившей первый порог U1 и соответствующий отражениям сигнала от фюзеляжа вертолета, который подается (фиг. 1) на вход первого фильтра 5 сопровождения. В результате на его выходе формируется оценка  доплеровской частоты, которая поступает на первый вход анализатора 6.
доплеровской частоты, которая поступает на первый вход анализатора 6.
Одновременно определяются отсчеты Fcy спектральной составляющей с амплитудой Асу, превысившей второй порог U2, но не превысившей первый порог U1, и соответствующие отражениям сигнала от подвижных частей силовой установки вертолета (фиг. 2г), которые подаются (фиг. 1) на вход второго фильтра 7 сопровождения. В результате на его выходе формируется оценка  доплеровской частоты, которая поступает на второй вход анализатора 6.
доплеровской частоты, которая поступает на второй вход анализатора 6.
Одновременно определяются отсчеты Fi с амплитудами Ai, превысивших третий порог U3 и не превысившие второй порог U2, которые соответствуют отражениям сигнала от лопастей несущего винта вертолета (фиг. 2д), которые поступают на вход вычислителя 8 энергетического центра, куда также поступают значения амплитуд Аф и Асу. В результате на выходе вычислителя 8 энергетического центра вычисляется один отсчет Fэ доплеровской частоты (фиг.2е), который подается на вход третьего фильтра 9 (фиг. 1) сопровождения, на его выходе которого формируется оценка  доплеровской частоты по отражениям сигнала от лопастей его несущего винта. Данная оценка поступает на третий вход анализатора 6.
доплеровской частоты по отражениям сигнала от лопастей его несущего винта. Данная оценка поступает на третий вход анализатора 6.
На выходе анализатора 6 при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, формируется оценка  доплеровской частоты с выхода первого фильтра 5 сопровождения вертолета по отражениям сигнала от его фюзеляжа.
доплеровской частоты с выхода первого фильтра 5 сопровождения вертолета по отражениям сигнала от его фюзеляжа.
При наличии отсчетов Fcy доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1 на выходе анализатора 6 формируется оценка  доплеровской частоты с выхода второго фильтра 7 сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки.
доплеровской частоты с выхода второго фильтра 7 сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки.
При наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших третий порог U3 и не превысивших первый порог U1 и второй порог U2 на выходе анализатора 6 формируется оценка  доплеровской частоты с выхода третьего фильтра 9 сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
доплеровской частоты с выхода третьего фильтра 9 сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
Для оценки работоспособности предлагаемого способа были проведены летно-экспериментальные исследования по регистрации на промежуточной частоте с выхода линейной части приемника РЛС с фазированной антенной решеткой, построенной по импульсно-доплеровскому принципу обработки сигналов и работающей в сантиметровом диапазоне волн, радиолокационных сигналов, отраженных практически от всех типов отечественных вертолетов при различном характере их полета (в том числе и в режиме «висение»), и их последующая узкополосная спектральная обработка на основе процедуры БПФ с эквивалентной полосой пропускания одного бина, равной 10 Гц. В результате обработки зарегистрированных реальных радиолокационных сигналов, отраженных от различных типов отечественных вертолетов, установлено, что:
амплитуда спектральной составляющей сигнала, отраженного от фюзеляжа вертолета Аф в 3-5 раз превышает амплитуды Асу спектральных составляющих сигнала, отраженного от подвижных частей силовой установки вертолета, и в 10-12 раз превышает амплитуды Ai спектральных составляющих сигнала, отраженного от лопастей несущего винта вертолета, то есть величина порога U2 должна быть меньше в 3-5 раз величины порога U1, а величина порога U3 должна быть меньше в 10-12 раз величины порога U1;
диапазон доплеровских частот, занимаемый отражениями сигнала от лопастей несущего винта вертолета, составляет 8-12 кГц;
численное значение отсчета F3 доплеровской частоты (фиг. 2е), соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета отличается на 12-15% от значения отсчета доплеровской частоты, вычисленного в виде математического ожидания отсчетов доплеровских частот амплитуд Ai, то есть точность оценки доплеровской частоты  выше относительно точности оценки доплеровской частоты, получаемой на основе фильтрации отсчетов доплеровской частоты, соответствующих математическому ожиданию отсчетов доплеровских частот амплитуд Ai.
выше относительно точности оценки доплеровской частоты, получаемой на основе фильтрации отсчетов доплеровской частоты, соответствующих математическому ожиданию отсчетов доплеровских частот амплитуд Ai.
Таким образом, применение предлагаемого способа позволит обеспечить бессрывное сопровождение вертолета в импульсно-доплеровской РЛС.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Зингер Р.А. Оценка характеристик оптимального фильтра для слежения за пилотируемой целью // Зарубежная радиоэлектроника. - 1971. - №8. (аналог).
2. Пат. 2728278 Российская Федерация, МПК G01S 13/52 (2020.02). Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции [Текст] / Горбунов С.А., Богданов А.В., Бедрицкий А.И., Голубенко В.А., Кучин А.А, Миронович С.Я.; заявитель и патентообладатель Федеральное государственное казенное военное образовательное учреждение высшего образования «Военная академия воздушно-космической обороны имени Маршала Советского Союза Г.К. Жукова» Министерства обороны Российской Федерации (RU). - №2019143724/19; заявл. 23.12.2019; опубл. 29.07.2020, Бюл. №22. - 2 с.: ил. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2728278C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |

Изобретение относится к способу сопровождения вертолета в импульсно-доплеровской радиолокационной станции (РЛС). Для сопровождения вертолета сигнал, отраженный от вертолета на промежуточной частоте в импульсно-доплеровской радиолокационной станции, подвергают узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуют в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от фюзеляжа вертолета, подвижных частей его силовой установки и вращающихся лопастей его несущего винта, определенным образом осуществляют фильтрацию доплеровских частот и формируют их оценку. Обеспечивается бессрывное сопровождение вертолета в импульсно-доплеровской РЛС. 2 ил.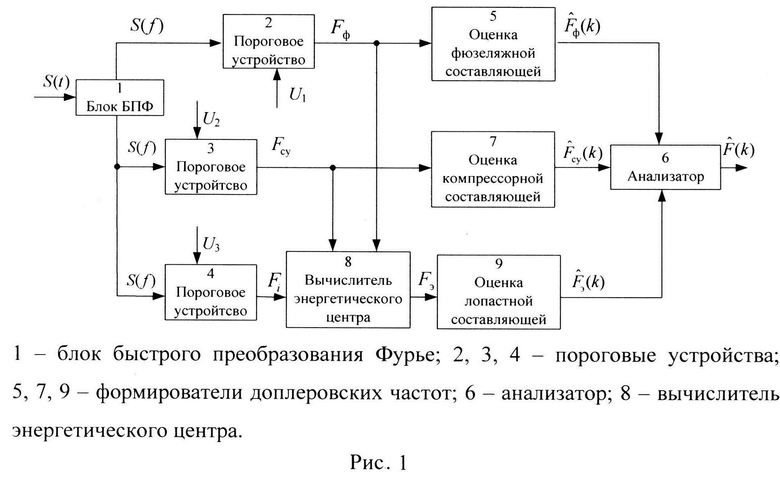
Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции, заключающийся в том, что сигнал, отраженный от вертолета на промежуточной частоте в импульсно-доплеровской радиолокационной станции, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от фюзеляжа вертолета, подвижных частей его силовой установки и вращающихся лопастей его несущего винта, в каждый k-й, где k=1…К, К - общее количество отсчетов дискретного времени, дискретный момент времени определяется отсчет Fф доплеровской частоты спектральной составляющей с максимальной амплитудой Аф, превысившей первый порог U1 и соответствующий отражениям сигнала от фюзеляжа вертолета, осуществляется фильтрация в первом фильтре сопровождения полученных отсчетов Fф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в результате чего на выходе первого фильтра сопровождения формируется оценка  доплеровской частоты, отличающийся тем, что одновременно с определением отсчетов Fф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в каждый k-й дискретный момент времени определяются отсчеты Fcy спектральной составляющей с амплитудой Асу, превысившей второй порог U2, но не превысившей первый порог U1, и соответствующие отражениям сигнала от подвижных частей силовой установки вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fcy доплеровских частот, соответствующих отражениям сигнала от подвижных частей силовой установки вертолета, определяются отсчеты доплеровских частот Fi, где i=1,…,I; I - общее количество амплитуд спектральных составляющих, превысивших третий порог U3, но не превысивших первый U1 и второй U2, за исключением спектральных составляющих с амплитудами Аф и Асу, при этом величина третьего порога U3 в m раз меньше величины второго порога U2, вычисляется один отсчет F3 доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация в третьем фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка
доплеровской частоты, отличающийся тем, что одновременно с определением отсчетов Fф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в каждый k-й дискретный момент времени определяются отсчеты Fcy спектральной составляющей с амплитудой Асу, превысившей второй порог U2, но не превысившей первый порог U1, и соответствующие отражениям сигнала от подвижных частей силовой установки вертолета, при этом величина второго порога U2 в n раз меньше величины первого порога U1, осуществляется фильтрация во втором фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fcy доплеровских частот, соответствующих отражениям сигнала от подвижных частей силовой установки вертолета, определяются отсчеты доплеровских частот Fi, где i=1,…,I; I - общее количество амплитуд спектральных составляющих, превысивших третий порог U3, но не превысивших первый U1 и второй U2, за исключением спектральных составляющих с амплитудами Аф и Асу, при этом величина третьего порога U3 в m раз меньше величины второго порога U2, вычисляется один отсчет F3 доплеровской частоты, соответствующий энергетическому центру отражений сигнала от лопастей несущего винта вертолета, осуществляется фильтрация в третьем фильтре сопровождения полученных последовательных в дискретном времени отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, при наличии отсчетов Fф доплеровских частот спектральных составляющих, превысивших первый порог U1 и соответствующих отражениям сигнала от фюзеляжа вертолета, на выходе формируется оценка  доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от фюзеляжа вертолета, при наличии отсчетов Fcy доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка
доплеровской частоты с выхода первого фильтра сопровождения вертолета по отражениям сигнала от фюзеляжа вертолета, при наличии отсчетов Fcy доплеровских частот спектральных составляющих, превысивших второй порог U2 и не превысивших первый порог U1, на выходе формируется оценка  доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших третий порог U3 и не превысивших первый U1 и второй U2 пороги, на выходе формируется оценка
доплеровской частоты с выхода второго фильтра сопровождения вертолета по отражениям сигнала от подвижных частей его силовой установки, при наличии отсчетов Fi доплеровских частот спектральных составляющих, превысивших третий порог U3 и не превысивших первый U1 и второй U2 пороги, на выходе формируется оценка  доплеровской частоты с выхода третьего фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
доплеровской частоты с выхода третьего фильтра сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ металлургической переработки фосфористого ферромарганца | 1961 |
|
SU144505A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ КЛАССА "ВЕРТОЛЕТ" | 2010 |
|
RU2468385C2 |
| KR 101029175 B1, 12.04.2011 | |||
| CN 105759264 B, 04.05.2018. | |||

