Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типа самолета с турбореактивным двигателем (ТРД).
Известен способ функционирования импульсно-доплеровской РЛС, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в пространство, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующим их спектральным анализом [1].
Недостатком данного способа функционирования импульсно-доплеровской РЛС являются его ограниченные функциональные возможности, не позволяющие распознать тип самолета с ТРД.
Известен способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, заключающийся в том, что радиолокационный (РЛ) сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки, определяется отсчет доплеровской частоты в АЧС с максимальной амплитудой спектральной составляющей спектра сигнала, соответствующего его отражениям от планера самолета с ТРД, который поступает на вход первого фильтра сопровождения, определяется отсчет доплеровской частоты в АЧС, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, который поступает на вход второго фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД, на каждом k-ом такте работы обоих оптимальных фильтров сопровождения определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей
КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона  соответствующего q-му типу самолета с ТРД, определяются выражениями
соответствующего q-му типу самолета с ТРД, определяются выражениями


где
FP - максимальная частота вращения ротора КНД силовой установки q-го типа самолета с ТРД;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов с ТРД;
Z - количество лопаток рабочего колеса первой ступени КНД силовой установки самолета с ТРД,
за конечное количество тактов работы обоих фильтров сопровождения вычисляется вероятность попадания величины  в каждый из априорно сформированный q-й поддиапазон, затем определяется номер q-го поддиапазона, для которого величина данной вероятности максимальна, и ее значение сравнивается с пороговым значением вероятности распознавания типа самолета с ТРД, при превышении порога принимается решение о распознавании на этапе сопровождения q-го типа самолета с ТРД с вероятностью, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа сопровождаемого самолета с заданной вероятностью [2].
в каждый из априорно сформированный q-й поддиапазон, затем определяется номер q-го поддиапазона, для которого величина данной вероятности максимальна, и ее значение сравнивается с пороговым значением вероятности распознавания типа самолета с ТРД, при превышении порога принимается решение о распознавании на этапе сопровождения q-го типа самолета с ТРД с вероятностью, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа сопровождаемого самолета с заданной вероятностью [2].
Недостатком данного способа является низкая достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС. Это обусловлено тем, что данный способ распознавания справедлив лишь при выполнении условия, согласно которому отсчет доплеровской частоты в АЧС с максимальной амплитудой спектральной составляющей спектра сигнала должен обязательно соответствовать отражениям РЛ сигнала от планера самолета с ТРД и уже относительно данного отсчета в АЧС находится отсчет доплеровской частоты, соответствующий отражениям РЛ сигнала от первой ступени КНД его силовой установки (амплитуда спектральной составляющей сигнала, отраженного от первой ступени КНД, всегда должна быть меньше амплитуды спектральной составляющей сигнала, отраженного от планера самолета, и больше других спектральных составляющих в АЧС). В противном случае (при превышении амплитуд спектральных составляющих сигнала амплитуды спектральной составляющей сигнала, отраженного от планера самолета) тип самолета с ТРД будет распознан не правильно.
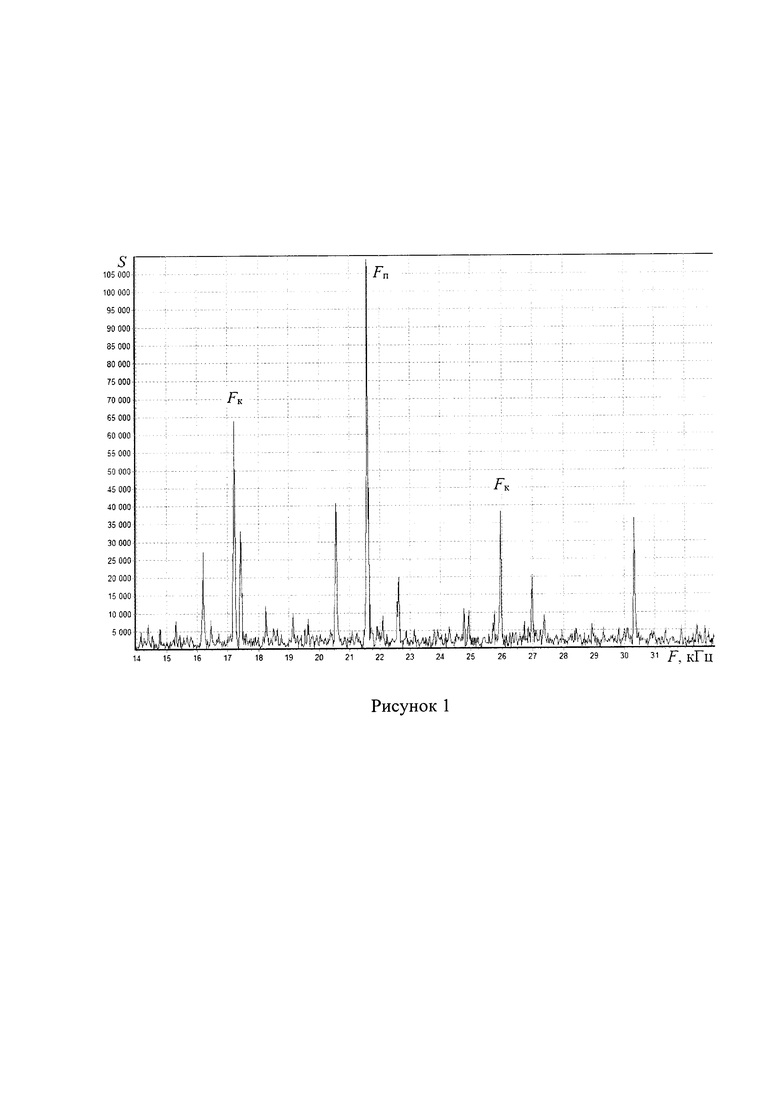
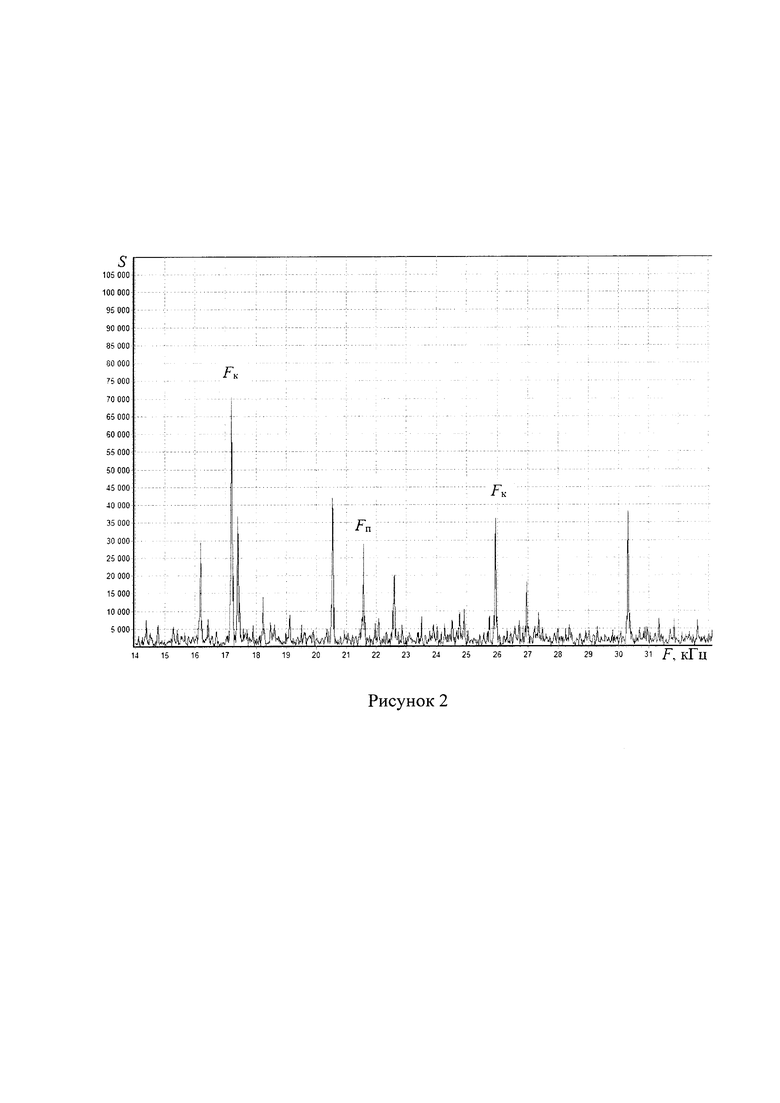
Действительно, на основе анализа результатов экспериментальных исследований по регистрации с линейного выхода приемника импульсно-доплеровской РЛС воздушного базирования РЛ сигналов в сантиметровом диапазоне волн, отраженных от различных типов самолетов с ТРД, и их обработке с целью получения АЧС зарегистрированных реальных РЛ сигналов путем применения узкополосной доплеровской фильтрации на основе процедуры БПФ, установлено, например, что в 1000 последовательных АЧС зарегистрированного РЛ сигнала, отраженного от одного и того же типа самолета с ТРД, в около 350 амплитудно-частотных спектрах наблюдались ситуации, когда амплитуды спектральных составляющих сигнала превышали амплитуду спектральной составляющей сигнала, отраженного от планера самолета. Так, на рисунке 1 представлен пример АЧС реального РЛ сигнала, когда амплитуда спектральной составляющей сигнала, отраженного от планера самолета (на частотной позиции Fп), превышает амплитуду спектральной составляющей сигнала, отраженного от первой ступени КНД (на частотной позиции Fк), а на рисунке 2 - пример АЧС, когда амплитуды спектральных составляющих сигнала (в том числе отраженного от первой ступени КНД - на частотной позиции Fк) превышают амплитуду спектральной составляющей сигнала, отраженного от планера самолета (на частотной позиции Fп). При этом, для объективности, частотная позиция планерной составляющей сигнала (около 21,5 кГц), обусловленного скоростью сближения носителя РЛС (с аппаратурой регистрации сигналов) и самолета с ТРД, в амплитудно-частотном спектре определялась на основе информации бортовой системы объективного контроля.
Цель изобретения - повышение достоверности распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции.
С этой целью, в способе распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, заключающимся в том, что РЛ сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса КНД его силовой установки, дополнительно путем пороговой обработки АЧС сигнала формируют только те отсчеты доплеровских частот Fi с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог (где  N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог), за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог), за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, как
обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, как

где
λ - рабочая длина волны импульсно-доплеровской РЛС,
в АЧС сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты  (где j=1, …, (i-1), (i+1), …, N), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (j=1, …, (i-1), (i+1), …, N), которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона
(где j=1, …, (i-1), (i+1), …, N), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (j=1, …, (i-1), (i+1), …, N), которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона  соответствующего q-му типу цели, определяются выражениями (1) и (2), при попадании разности доплеровских частот ΔFпк в q-ый поддиапазон принимают решение о q-м типе самолета с ТРД.
соответствующего q-му типу цели, определяются выражениями (1) и (2), при попадании разности доплеровских частот ΔFпк в q-ый поддиапазон принимают решение о q-м типе самолета с ТРД.
Новыми признаками, обладающими существенными отличиями, являются.
1. Предварительное вычисление в соответствии с формулой (3) за время каждого обзора пространства по измеренным значениям дальности Д1 и Д2 частотной позиции доплеровской частоты  обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
2. Окончательное определение в АЧС доплеровской частоты сигнала Fп, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД, по значению доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  в АЧС, ближайшей к предварительно вычисленной частотной позиции доплеровской частоты
в АЧС, ближайшей к предварительно вычисленной частотной позиции доплеровской частоты  .
.
3. Определение в амплитудно-частотном спектре сигнала позиции доплеровской частоты (j=1, …, (i-1), (i+1), …, N), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (j=1, …, (i-1), (i+1), …, N), которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД.
4. Принятие решение о типе самолета с ТРД на основе анализа попадания разности ΔFпк=(Fп-Fк) отсчетов доплеровских частот в соответствующий поддиапазон априорно разбитых разностей на Q  неперекрывающихся поддиапазонов, где нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (1) и (2).
неперекрывающихся поддиапазонов, где нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (1) и (2).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит повысить достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС.
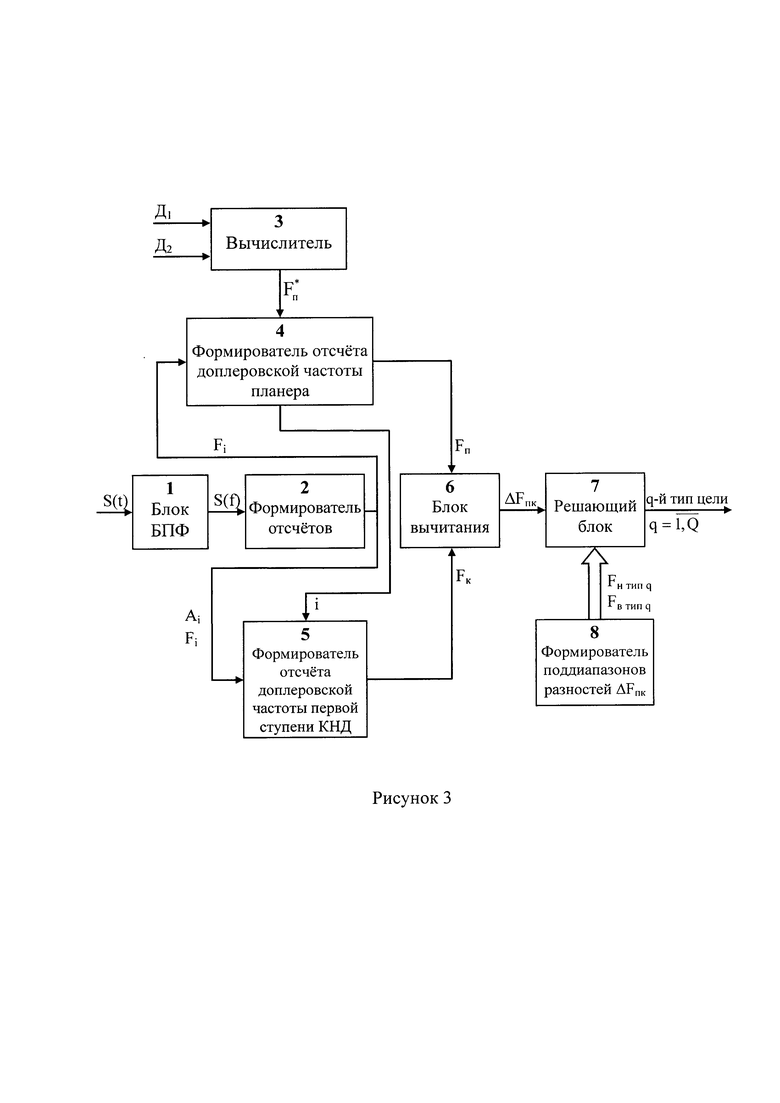
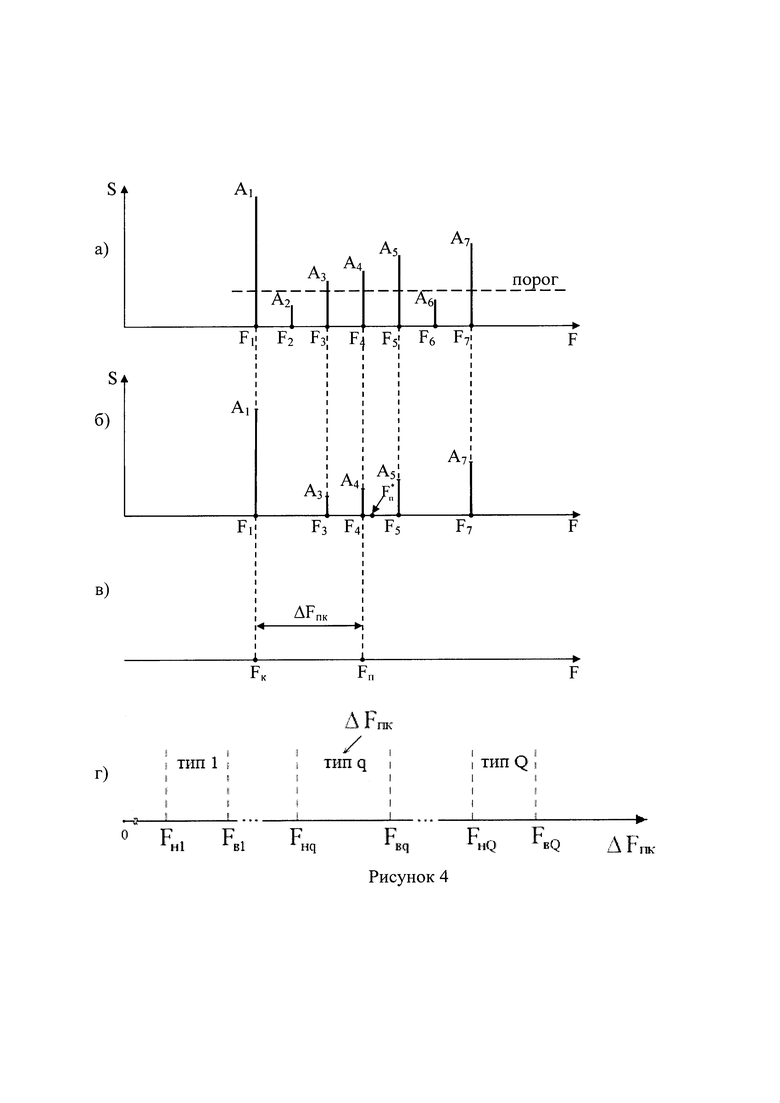
На рисунке 3 приведена блок-схема, поясняющая предлагаемый способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС, на рисунке 4 (а, б, в, г) - эпюры, поясняющие распознавание q-го типа самолета с ТРД.
Предлагаемый способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС осуществляется следующим образом.
Радиолокационный сигнал S(t), отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте, поступает (рисунок 3) на вход блока 1 БПФ, где подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f) (рисунок 4а - отсчеты доплеровских частот F1, F2, F3, F4, F5, F6, F7 с соответствующими амплитудами А1, А2, А3, А4, А5, А6, А7), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса КНД его силовой установки. Данные спектральные составляющие (рисунок 3) с соответствующими частотами и амплитудами поступают на формирователь 2 отсчетов, в котором путем пороговой обработки формируются (рисунок 4б) только те отсчеты доплеровских частот (F1, F3, F4, F5, F7) с соответствующими амплитудами (А1, А3, А4, А5, А7) спектральных составляющих, которые превысили установленный порог (амплитуды А2 и А6 спектральных составляющих на частотных позициях соответственно F2 и F6 не превысили установленный порог).
За время Т каждого обзора пространства измеренные значения дальности Д1 и Д2 между носителем РЛС и самолетом с ТРД поступают (рисунок 3) соответственно на первый и второй входы вычислителя 3, в котором в соответствии с формулой (3) предварительно вычисляется частотная позиция доплеровской частоты  обусловленная скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД. Это значение доплеровской частоты
обусловленная скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД. Это значение доплеровской частоты  поступает на первый вход формирователя 4 отсчета доплеровской частоты планерной составляющей спектра сигнала (рисунок 4б), на второй вход которого с выхода (рисунок 3) формирователя 2 отсчетов поступают значения доплеровских отсчетов частот F1, F3, F4, F5, F7. В формирователе 4 определяется (рисунок 4в) ближайшее к предварительно вычисленной в вычислителе 3 частотной позиции доплеровской частоты
поступает на первый вход формирователя 4 отсчета доплеровской частоты планерной составляющей спектра сигнала (рисунок 4б), на второй вход которого с выхода (рисунок 3) формирователя 2 отсчетов поступают значения доплеровских отсчетов частот F1, F3, F4, F5, F7. В формирователе 4 определяется (рисунок 4в) ближайшее к предварительно вычисленной в вычислителе 3 частотной позиции доплеровской частоты  , значение доплеровской частоты
, значение доплеровской частоты  (рисунок 4в - частотная позиция F4) с соответствующей амплитудой
(рисунок 4в - частотная позиция F4) с соответствующей амплитудой  (рисунок 4в - амплитуда А4) спектральной составляющей, превысившей установленный порог, которое окончательно и определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
(рисунок 4в - амплитуда А4) спектральной составляющей, превысившей установленный порог, которое окончательно и определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя импульсно-доплеровской РЛС с планером самолета с ТРД.
В формирователе 5 (рисунок 3), на первый и второй входы которого поступают соответственно значения частот F1, F3, F4, F5, F7 с соответствующими амплитудами А1, А3, А4, А5, А7 с выхода формирователя 2 отсчетов и значение частотной позиции i=4, соответствующей доплеровской частоте, обусловленной скоростью сближения носителя РЛС с самолетом с ТРД, определяется (без учета 4-й позиции) позиция доплеровской частоты  (j=1, 3, 5, 7), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (рисунок 4б - амплитуда А1 на частотной позиции F1), которая соответствует значению доплеровской частоты Fк (рисунок 4в), обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД.
(j=1, 3, 5, 7), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (рисунок 4б - амплитуда А1 на частотной позиции F1), которая соответствует значению доплеровской частоты Fк (рисунок 4в), обусловленной скоростью сближения носителя импульсно-доплеровской РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД.
В блоке 6 вычитания (рисунок 3) вычисляется разность доплеровских частот ΔFпк=(Fп-Fк) (рисунок 4в), которая поступает (рисунок 3) на первый вход решающего блока 7.
В формирователе 8 хранятся априорно разбитые на Q неперекрывающиеся поддиапазоны разностей ΔFпк. При этом, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона  соответствующего q-му типу цели, определяются выражениями (1) и (2). Значения границ поддиапазонов FHq и FBq поступают на группу входов решающего блока 7.
соответствующего q-му типу цели, определяются выражениями (1) и (2). Значения границ поддиапазонов FHq и FBq поступают на группу входов решающего блока 7.
В решающем блоке 7 на основе анализа (рисунок 4 г) попадании разности доплеровских частот ΔFпк в q-ый поддиапазон принимается решение о q-м типе самолета с ТРД.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование. На вход блока 1 БПФ подавался на промежуточной частоте зарегистрированный в сантиметровом диапазоне волн с линейного выхода приемника импульсно-доплеровской РЛС воздушного базирования РЛ сигнал, отраженный от отечественного самолета с ТРД. Процедура БПФ осуществлялась при эквивалентной полосе пропускания одного бина алгоритма БПФ, равного порядка 10 Гц. На выходе блока 1 БПФ последовательно формировались АЧС вида, приведенные на рисунках 1 (амплитуда Ап спектральной составляющей сигнала, отраженного от планера самолета, превышала амплитуду Ак спектральной составляющей сигнала, отраженного от первой ступени КНД) и 2 (амплитуды спектральных составляющих сигнала (в том числе отраженного от первой ступени КНД - амплитуда Ак) превышали амплитуду Ап спектральной составляющей сигнала, отраженного от планера самолета). Всего было проанализировано 1000 амплитудно-частотных спектров.
В результате имитационного моделирования установлено, что с доверительной вероятностью 0,95 оценка математического ожидания вероятности правильного (ложного) распознавания данного типа самолета с ТРД находится в доверительном интервале 0,88-0,92 (10-3 - 10-4).
Таким образом, применение предлагаемого изобретения позволит повысить достоверность распознавания типа самолета с ТРД в импульсно-доплеровской РЛС независимо от того, превышает или нет амплитуда спектральной составляющей сигнала, отраженного от планера самолета с ТРД, амплитуды других спектральных составляющих сигнала, отраженного от вращающихся лопаток рабочего колеса КНД силовой установки самолета.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 639-641, рисунок 12.39 (аналог).
2. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем». Патент на изобретение №2419815, 2009 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА САМОЛЁТА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2731878C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ОДИНОЧНОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2023 |
|
RU2807510C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM | 2020 |
|
RU2727963C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
Изобретение относится к области радиолокации и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типа самолета с турбореактивным двигателем (ТРД). Достигаемый технический результат - повышение достоверности распознавания типа самолета с ТРД. Способ распознавания типа самолета с ТРД в импульсно-доплеровской РЛС заключается в том, что радиолокационный сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки, путем пороговой обработки АЧС сигнала формируют только те отсчеты доплеровских частот, которые превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с ТРД, по которым предварительно вычисляют частотную позицию доплеровской частоты  , обусловленной скоростью сближения носителя РЛС с планером самолета с ТРД, в АЧС сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
, обусловленной скоростью сближения носителя РЛС с планером самолета с ТРД, в АЧС сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп в его АЧС, обусловленную скоростью сближения носителя РЛС с планером самолета с ТРД, определяют в АЧС сигнала позицию доплеровской частоты  (j=1, …, (i-1), (i+1), …, N), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (j=1, …, (i-1), (i+1), …, N), которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся q поддиапазонов
(j=1, …, (i-1), (i+1), …, N), на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj (j=1, …, (i-1), (i+1), …, N), которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя РЛС с вращающимися лопатками первой ступени КНД силовой установки самолета с ТРД, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся q поддиапазонов  соответствующих q-му типу цели, при попадании разности доплеровских частот ΔFпк в q-й поддиапазон принимают решение о q-м типе самолета с ТРД. 4 ил.
соответствующих q-му типу цели, при попадании разности доплеровских частот ΔFпк в q-й поддиапазон принимают решение о q-м типе самолета с ТРД. 4 ил.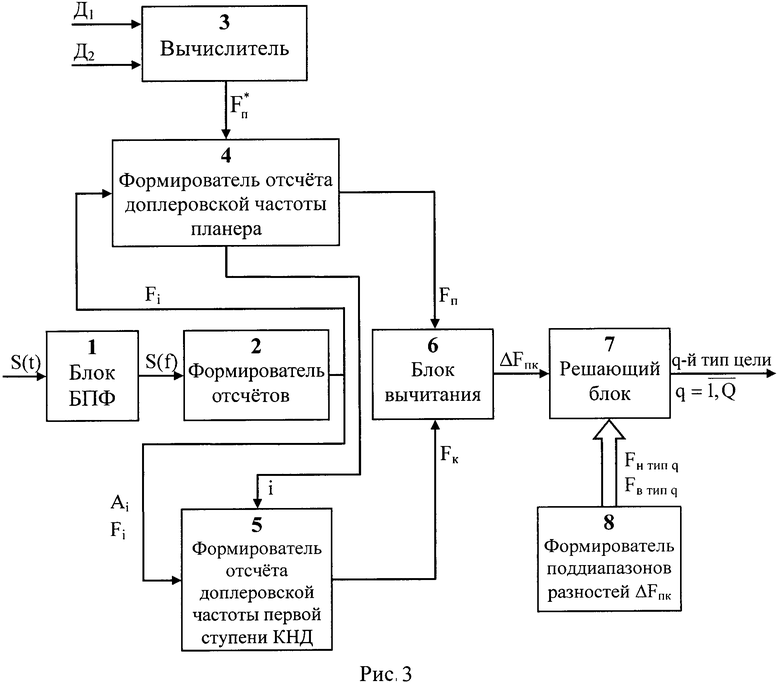
Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции, заключающийся в том, что радиолокационный сигнал, отраженный от самолета с турбореактивным двигателем, с выхода приемника радиолокационной станции на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся лопаток рабочего колеса компрессора низкого давления его силовой установки, отличающийся тем, что путем пороговой обработки амплитудно-частотного спектра сигнала формируют только те отсчеты доплеровских частот Fi с соответствующими амплитудами спектральных составляющих, которые превысили установленный порог, где  N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты
N - общее количество отсчетов доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, за время Т каждого обзора пространства измеряют два значения дальности Д1 и Д2 до самолета с турбореактивным двигателем, по измеренным значениям дальности Д1 и Д2 предварительно вычисляют частотную позицию доплеровской частоты  , обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как
, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, как  где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты
где λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, в амплитудно-частотном спектре сигнала определяют ближайшее к предварительно вычисленной частотной позиции доплеровской частоты  значение доплеровской частоты
значение доплеровской частоты  с соответствующей амплитудой
с соответствующей амплитудой  спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп, в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты
спектральной составляющей, превысившей установленный порог, которое окончательно определяет доплеровскую частоту сигнала Fп, в его амплитудно-частотном спектре, обусловленную скоростью сближения носителя импульсно-доплеровской радиолокационной станции с планером самолета с турбореактивным двигателем, определяют в амплитудно-частотном спектре сигнала позицию доплеровской частоты  , где j=1, …, (i-1), (i+1), …, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j=1, …, (i-1), (i+1), …, N, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона,
, где j=1, …, (i-1), (i+1), …, N, на которой находится спектральная составляющая, превысившая установленный порог и имеющая максимальную амплитуду Aj, j=1, …, (i-1), (i+1), …, N, которая соответствует значению доплеровской частоты Fк, обусловленной скоростью сближения носителя импульсно-доплеровской радиолокационной станции с вращающимися лопатками первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, вычисляют разность доплеровских частот ΔFпк=(Fп-Fк), априорно разбивают диапазон разностей ΔFпк на Q неперекрывающихся поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона,  , соответствующего q-му типу цели, определяются выражениями
, соответствующего q-му типу цели, определяются выражениями


где FP - максимальная частота вращения ротора компрессора низкого давления силовой установки q-го типа самолета с турбореактивным двигателем; n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов с турбореактивным двигателем; Z - количество лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки самолета с турбореактивным двигателем, при попадании разности доплеровских частот ΔFпк в q-й поддиапазон принимают решение о q-м типе самолета с турбореактивным двигателем.
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2005 |
|
RU2324202C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| Диаметральный вентилятор | 1980 |
|
SU901641A1 |
| WO 1998036289 A1, 20.08.1998 | |||
| US 5506817 A, 09.04.1996. | |||

