Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для сопровождения и распознавания типа воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем (ТРД)».
Известен способ сопровождения ВЦ, заключающийся в отслеживании ее по дальности, скорости и ускорению и основанный на вычислении процедуры оптимальной линейной многомерной дискретной калмановской фильтрации [1].
Недостатком данного способа сопровождения ВЦ являются его ограниченные функциональные возможности, не позволяющие распознать тип ВЦ из класса «самолет с ТРД».
Известен способ сопровождения ВЦ, основанный на процедуре оптимальной многомерной линейной дискретной калмановской фильтрации и описываемый следующими выражениями [2]:
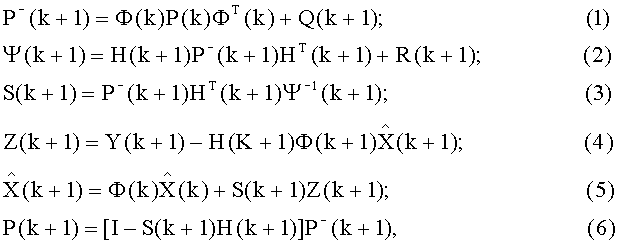
где k=0, 1,… K,… - номер такта работы фильтра;
К - промежуточное количество тактов работы фильтра;
P-(k+1) и P(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Φ(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 - вектор текущих и экстраполированных оценок фазовых координат вектора состояния;
- вектор текущих и экстраполированных оценок фазовых координат вектора состояния;
H(k) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы.
Недостатком данного способа сопровождения ВЦ являются его ограниченные функциональные возможности, которые не позволяют распознать тип сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью, не ниже заданной.
Целью предлагаемого изобретения является расширение функциональных возможностей по распознаванию типа ВЦ из класса «самолет с ТРД» с вероятностью, не ниже заданной на этапе ее сопровождения.
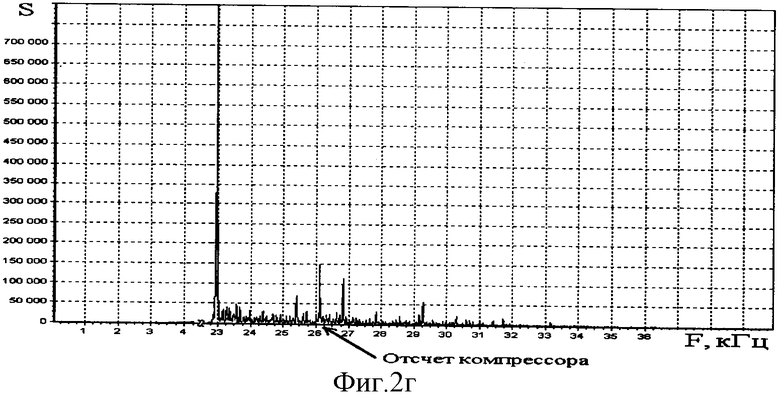
Для достижения этой цели в способе сопровождения ВЦ, основанном на процедуре оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями (1)-(6) при сопровождении ВЦ по доплеровской частоте, дополнительно сигнал, отраженный от нее, на промежуточной частоте с выхода приемника станции сопровождения цели подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, затем определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ и поступает на вход оптимального фильтра (ОФп) сопровождения ВЦ, работающего в соответствии с процедурой (1)-(6), а также определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, который поступает на вход оптимального фильтра ОФк сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и работающего аналогично, как и оптимальный фильтр ОФп сопровождения ВЦ в соответствии с процедурой (1)-(6), далее на каждом k-м такте работы обоих оптимальных фильтров ОФп и ОФк сопровождения определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД», при этом весь диапазон возможных значений оценок разностей
КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД», при этом весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где q=1,…Q, соответствующего i-му типу цели, где i=1, …I; I - максимальное количество распознаваемых типов ВЦ из класса «самолет с ТРД», определяются выражениями
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где q=1,…Q, соответствующего i-му типу цели, где i=1, …I; I - максимальное количество распознаваемых типов ВЦ из класса «самолет с ТРД», определяются выражениями


где FPi - максимальная частота вращения ротора КНД силовой установки i-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nлi - количество лопаток рабочего колеса первой ступени КНД,
вычисляется за К промежуточных тактов работы обоих оптимальных фильтров вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон, затем определяется номер i-го, i=1, …I, поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании i-го типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой воздушной цели с заданной вероятностью.
в каждый из априорно сформированный q-й поддиапазон, затем определяется номер i-го, i=1, …I, поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании i-го типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой воздушной цели с заданной вероятностью.
Новыми признаками, обладающими существенными отличиями, являются:
1. Параллельное сопровождение воздушной цели по доплеровским частотам, обусловленным отражениями сигнала от планера цели и вращающихся частей первой ступени КНД силовой установки сопровождаемой ВЦ.
2. Распознавание типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью не ниже заданной на основе анализа разности оценок доплеровских частот, обусловленных отражениями от планера цели и первой ступени КНД ее силовой установки.
Данные признаки обладают существенными отличиями, т.к. в известных способах не обнаружены.
Применение всех новых признаков позволит не только сопровождать по доплеровской частоте ВЦ, но и распознать ее тип с вероятностью, не ниже заданной.
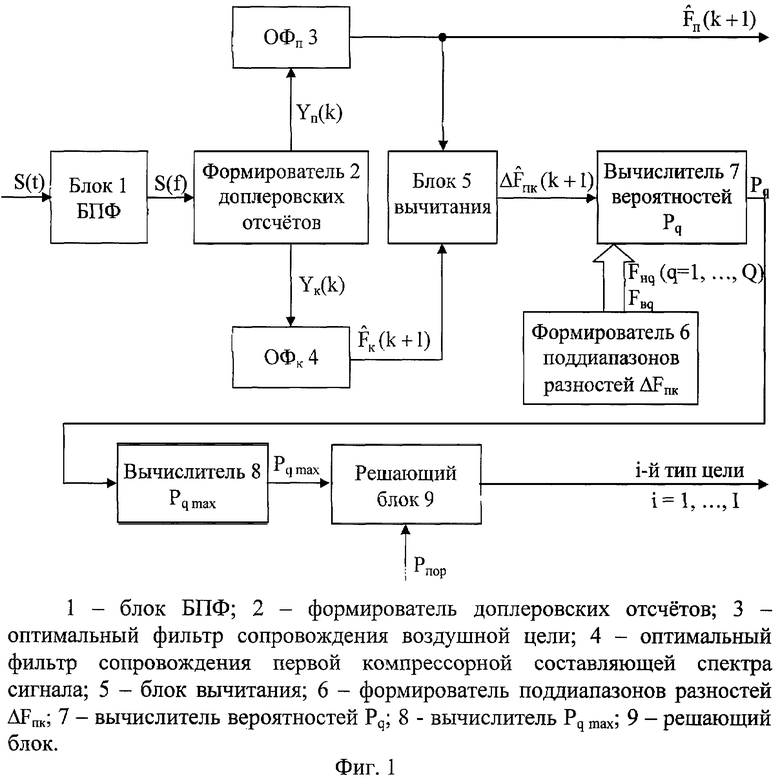
На фиг.1 приведена блок-схема, поясняющая предлагаемый способ сопровождения ВЦ из класса «самолет с ТРД», на фиг.2а-2ж - эпюры, поясняющие процесс распознавания i-го типа сопровождаемой ВЦ.
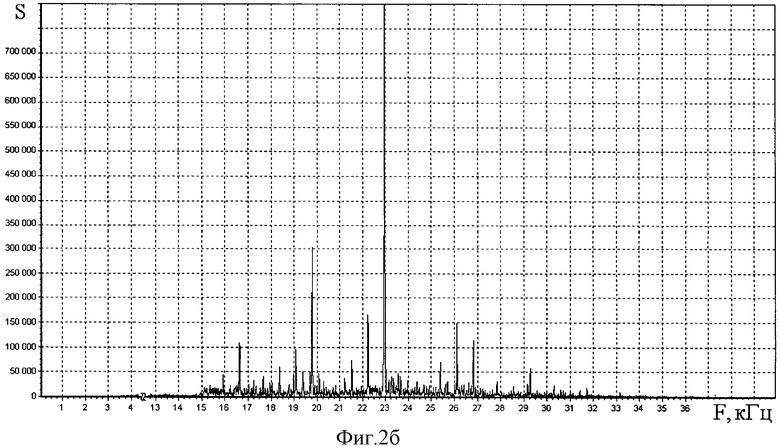
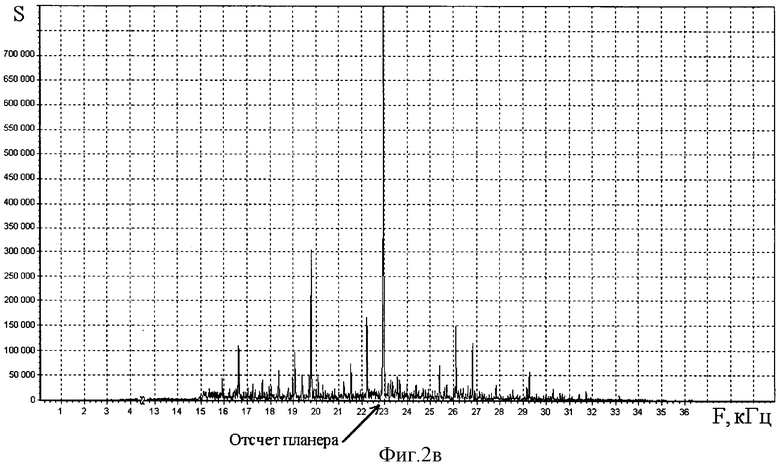
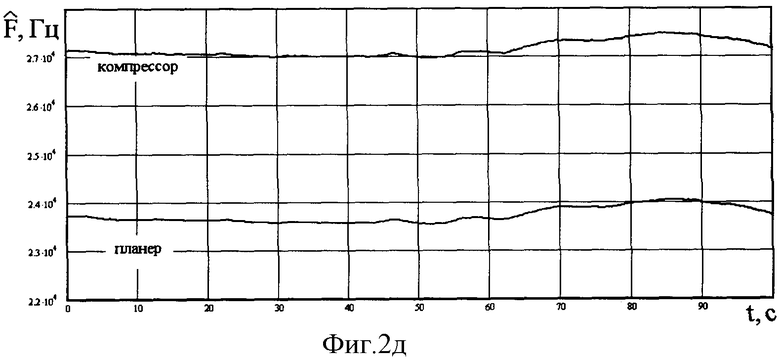
Предлагаемый способ сопровождения ВЦ из класса «самолет с ТРД» осуществляется следующим образом. На вход блока 1 БПФ (фиг.1) на промежуточной частоте с выхода приемника станции сопровождения цели поступает сигнал S(t) (фиг.2а), отраженный от ВЦ, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f) (фиг.2б), составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки. В формирователе 2 (фиг.1) доплеровских частот, во-первых, определяется отсчет доплеровской частоты (фиг.2в), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и, во-вторых, определяется отсчет доплеровской частоты (фиг.2г), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ. В результате на одном выходе формирователя 2 доплеровских отсчетов (фиг.1) формируется вектор наблюдения Yп(k) отсчетов доплеровской частоты, обусловленной отражениями сигнала от планера ВЦ, который поступает на вход оптимального фильтра ОФп 3 сопровождения ВЦ, работающего в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6), а на другом выходе формирователя 2 доплеровских отсчетов формируется вектор наблюдения Yк(k) отсчетов доплеровской частоты, обусловленной отражениями сигнала от первой ступени КНД, который поступает на вход оптимального фильтра ОФк 4 сопровождения первой компрессорной составляющей спектра сигнала, работающего аналогично, как и оптимальный фильтр ОФп 3 сопровождения ВЦ в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6). На каждом k-м такте работы обоих оптимальных фильтров ОФп 3 и ОФк 4 сопровождения в блоке 5 вычитания определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями (фиг.2д) от планера
между оцененными значениями доплеровских частот, обусловленных отражениями (фиг.2д) от планера  и первой ступени
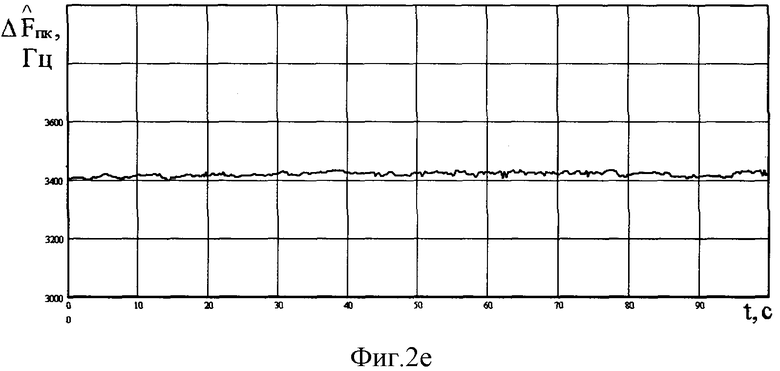
и первой ступени  КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД» (фиг.2е). В формирователе 6 поддиапазонов разностей
КНД силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД» (фиг.2е). В формирователе 6 поддиапазонов разностей  (фиг.1) весь диапазон возможных значений оценок разностей
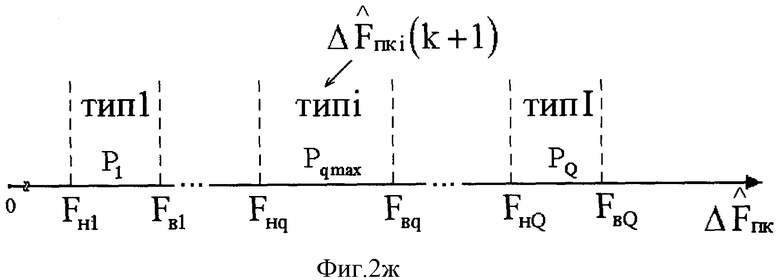
(фиг.1) весь диапазон возможных значений оценок разностей  априорно разбивается (фиг.2ж) на Q неперекрывающихся друг с другом поддиапазонов, при этом нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (q=1,…Q), соответствующего i-му типу цели (i=1,…I), определяются выражениями (7) и (8). За К промежуточных тактов работы обоих оптимальных фильтров ОФп 3 и ОФк 4 в вычислителе 7 вероятностей определяется вероятность Pq попадания величины
априорно разбивается (фиг.2ж) на Q неперекрывающихся друг с другом поддиапазонов, при этом нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (q=1,…Q), соответствующего i-му типу цели (i=1,…I), определяются выражениями (7) и (8). За К промежуточных тактов работы обоих оптимальных фильтров ОФп 3 и ОФк 4 в вычислителе 7 вероятностей определяется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон. В вычислителе 8 (фиг.1) определяется номер i-го (i=1, …I) поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max в решающем блоке 9 сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор, то принимается решение о распознавании i-го типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью Pq max (фиг.2ж), не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью.
в каждый из априорно сформированный q-й поддиапазон. В вычислителе 8 (фиг.1) определяется номер i-го (i=1, …I) поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max в решающем блоке 9 сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор, то принимается решение о распознавании i-го типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью Pq max (фиг.2ж), не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью.
Для оценки работоспособности предлагаемого способа были проведены летно-экспериментальные исследования по регистрации на промежуточной частоте с выхода линейной части приемника РЛС с фазированной антенной решеткой, построенной по импульсно-доплеровскому принципу обработки сигналов и работающей в сантиметровом диапазоне волн, радиолокационных сигналов, отраженных практически от всех типов отечественных самолетов (истребителей) из класса «самолет с ТРД», их последующая обработка в соответствии с предлагаемым способом распознавания типа сопровождаемой ВЦ. При регистрации реальных сигналов лоцируемая ВЦ находилась относительно РЛС со стороны передней полусферы на расстояниях 70-100 км под ракурсами 0-40 градусов. При узкополосном спектральном анализе зарегистрированных реальных радиолокационных сигналов согласно предлагаемому способу применялся алгоритм БПФ с эквивалентной полосой пропускания одного бина, равной 10 Гц (время когерентного накопления сигнала составляло 100 мс). В результате имитационного моделирования предлагаемого способа сопровождения ВЦ по реальным сигналам получены следующие характеристики при отношениях сигнал/шум 14-24 дБ за 35 тактов работы оптимальных фильтров (времени сопровождения 3,5 с):
точность сопровождения ВЦ по доплеровской частоте - 0,7-1,5 Гц;
вероятность правильного (ложного) распознавания типа цели - 0,76-0,82 (10-3-10-4).
Таким образом, применение предлагаемого изобретения позволит наряду с сопровождением ВЦ по доплеровской частоте дополнительно распознать и ее тип из класса «самолет с ТРД».
Источники информации
1. Зингер Р.А. Оценка характеристик оптимального фильтра для слежения за пилотируемой целью // Зарубежная радиоэлектроника. - 1971. - №8 (аналог).
2. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, с.150-151 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM | 2020 |
|
RU2727963C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |

Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для сопровождения и распознавания типа воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем (ТРД)». Способ заключается: в параллельном сопровождении на основе процедуры оптимальной многомерной линейной дискретной калмановской фильтрации отсчетов доплеровских частот, обусловленных отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления ее силовой установки; оценке на каждом такте работы обоих фильтров сопровождения разности между оцененными значениями доплеровских частот, обусловленных отражениями от планера и лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки ВЦ, которая соответствует только одному типу ВЦ из класса «самолет с ТРД», при этом весь диапазон возможных значений оценок данных разностей априорно разбивается на неперекрывающиеся друг с другом поддиапазоны, каждый из которых соответствует только одному типу цели из класса «самолет с ТРД»; вычислении за несколько промежуточных тактов работы обоих оптимальных фильтров вероятности попадания оценки разности частот в каждый из априорно сформированный поддиапазон; определении номера поддиапазона, для которого величина этой вероятности максимальна; сравнении данной вероятности с пороговым значением вероятности распознавания типа цели; принятии решения о распознавании типа сопровождаемой ВЦ из класса «самолет с ТРД» с вероятностью, не ниже заданной, в случае превышения порога или в противном случае принятии решения о невозможности распознавания типа сопровождаемой ВЦ с заданной вероятностью. Достигаемым техническим результатом является расширение функциональных возможностей по распознаванию типа ВЦ из класса «самолет с ТРД» с вероятностью не ниже заданной на этапе ее сопровождения. 8 ил.
Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем», заключающийся в вычислении процедуры оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями






где k=0, 1, …, К, …, - номер такта работы фильтра;
К - промежуточное количество тактов работы фильтра;
P-(k+1) и P(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 и
и  - векторы текущих и экстраполированных оценок доплеровской частоты, обусловленной скоростью сближения воздушной цели с носителем станции ее сопровождения;
- векторы текущих и экстраполированных оценок доплеровской частоты, обусловленной скоростью сближения воздушной цели с носителем станции ее сопровождения;
H(k) - матрица наблюдения;
Y(k) - вектор наблюдения отсчетов доплеровской частоты;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы, при сопровождении воздушной цели по доплеровской частоте, отличающийся тем, что сигнал, отраженный от нее, на промежуточной частоте с выхода приемника станции сопровождения цели подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса компрессора низкого давления ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера воздушной цели и поступает на вход оптимального фильтра сопровождения воздушной цели, работающего в соответствии с процедурой (1)-(6), а также определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера воздушной цели, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени компрессора низкого давления, и работающего аналогично, как и оптимальный фильтр сопровождения воздушной цели в соответствии с процедурой (1)-(6), на каждом k-м такте работы обоих оптимальных фильтров сопровождения определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  компрессора низкого давления силовой установки воздушной цели, которая соответствует только одному типу воздушной цели из класса «самолет с турбореактивным двигателем», при этом весь диапазон возможных значений оценок разностей
компрессора низкого давления силовой установки воздушной цели, которая соответствует только одному типу воздушной цели из класса «самолет с турбореактивным двигателем», при этом весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где q=1, …, Q, соответствующего i-му типу цели, где i=1, …, I; I - максимальное количество распознаваемых типов воздушных целей из класса «самолет с турбореактивным двигателем», определяются выражениями
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где q=1, …, Q, соответствующего i-му типу цели, где i=1, …, I; I - максимальное количество распознаваемых типов воздушных целей из класса «самолет с турбореактивным двигателем», определяются выражениями


где FPi - максимальная частота вращения ротора компрессора низкого давления силовой установки i-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nлi - количество лопаток рабочего колеса первой ступени компрессора низкого давления, вычисляется за К промежуточных тактов работы обоих оптимальных фильтров вероятность Pq попадания величины  в каждый априорно сформированный q-й поддиапазон, определяется номер i-го, i=1, …, I, поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании i-го типа сопровождаемой воздушной цели из класса «самолет с турбореактивным двигателем» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой воздушной цели с заданной вероятностью.
в каждый априорно сформированный q-й поддиапазон, определяется номер i-го, i=1, …, I, поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании i-го типа сопровождаемой воздушной цели из класса «самолет с турбореактивным двигателем» с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой воздушной цели с заданной вероятностью.
| КАЗАРИНОВ Ю.М | |||
| и др | |||
| Проектирование устройств фильтрации радиосигналов | |||
| - Л.: изд | |||
| Ленинградского университета, 1985, с.150, 151 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАЛОВЫСОТНЫХ ЦЕЛЕЙ ПО УГЛУ МЕСТА В ФАЗОВОЙ СУММАРНО-РАЗНОСТНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2020517C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| СПОСОБ РАСПОЗНАВАНИЯ УДАЛЕННЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2001 |
|
RU2206104C2 |
| US 5506817 A, 09.04.1996 | |||
| US 4490718 A, 25.12.1984 | |||
| US 5557278 A, 17.09.1996 | |||
| US 5223839 A, 20.06.1993. | |||

