Изобретение касается установки для перемещения грузов для перемещения груза в рабочем пространстве, причем установка для перемещения грузов имеет носитель груза и, по меньшей мере, одно закрепленное на носителе груза устройство захвата груза для приема груза и, по меньшей мере, три каната позиционирования и, по меньшей мере, три расположенных на расстоянии друг от друга подвесных устройства, причем каждое подвесное устройство имеет, по меньшей мере, одну лебедку каната позиционирования для намотки и размотки одного из канатов позиционирования, а носитель груза посредством канатов позиционирования висит на подвесных устройствах, причем носитель груза и закрепленное на нем устройство захвата груза путем приведения в действие лебедок канатов позиционирования могут передвигаться в и/или над рабочим пространством.
У такого рода установок для перемещения грузов носитель груза с помощью канатов позиционирования подвешен на расположенных с распределением в пространстве и на расстоянии друг от друга подвесных устройствах. Соответственной намоткой и размоткой канатов позиционирования на соответствующих лебедках канатов позиционирования носитель груза можно перемещать взад-вперед в области между подвесными устройствами, чтобы иметь возможность перемещать грузы, висящие на устройстве захвата груза и, тем самым, на носителе груза, в области между подвесными устройствами от одного места к другому месту.
Соответствующая родовому понятию установка для перемещения грузов показана в DE 10 2009 050 729 A1. Там в качестве носителя груза предусмотрена способная нести груз платформа с прямоугольным контуром. На соответствующих углах этой платформы закреплены канаты позиционирования. В качестве устройства захвата груза в DE 10 2009 050 729 A1 предусмотрены зафиксированные на платформе захватные инструменты.
Проблема показанной в DE 10 2009 050 729 A1 технологии состоит в том, что хотя в центральной области между подвесными устройствами грузы, закрепленные на носителе груза, соответственно, на устройстве захвата груза, могут быть очень хорошо захватываться и транспортироваться, но рабочее пространство установки для перемещения грузов, в котором грузы могут перемещаться, более или менее ограничено этой центральной областью между подвесными устройствами. В уровне техники сложно, а, начиная с определенного удаления от центральной области, практически невозможно принимать и транспортировать грузы устройством захвата груза. На краях, то есть вблизи подвесного устройства, происходит провисание канатов позиционирования, и там сложно контролировать платформу, используемую в уровне техники в качестве носителя груза.
Следовательно, задача изобретения - улучшить установку для перемещения грузов вышеназванного вида настолько, чтобы рабочее пространство между подвесными устройствами было максимально большим.
Для этого изобретение предлагает, чтобы носитель груза имел, по меньшей мере, один множественный канатный подвес, посредством которого, по меньшей мере, два из канатов позиционирования соединены через соответствующий канатный соединитель с носителем груза, причем каждый из канатных соединителей на множественном канатном подвесе размещен с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей поворота, и все оси поворота канатных соединителей пересекались в одной общей точке пересечения этого множественного канатного подвеса.
При этом предпочтительно все оси поворота пересекаются всегда, то есть, иными словами, в каждом произвольном рабочем положении носителя груза, в упомянутой общей точке пересечения этого множественного канатного подвеса.
Благодаря этому множественному канатному подвесу можно достичь особенно большого рабочего пространства между подвесными устройствами. Множественный канатный подвес позволяет также и в краевых областях пространства между подвесными устройствами целенаправленно привести носитель груза в такое положение, в котором он требуется, чтобы поднимать или укладывать груз. Благодаря использованию множественных канатных подвесов упомянутого вида на носителе груза им можно также очень хорошо управлять даже в упомянутых краевых областях. Прежде всего, благодаря использованию таких множественных канатных подвесов на носителе груза достигается также разъединение между качающимся на носителе груза грузом и канатами позиционирования. Это не приводит или, по меньшей мере, не так быстро приводит к раскачиванию канатов позиционирования, когда висящий на устройстве захвата груза груз совершает маятниковые движения, соответственно, качается. Особо предпочтительным является использование таких множественных канатных подвесов, когда носитель груза подвешен на четырех, пяти, шести или более канатах позиционирования и, таким образом, также на соответствующем числе подвесных устройств.
Рабочее пространство - это пространство между подвесными устройствами, в котором груз, закрепленный на устройстве захвата груза, соответственно, принятый/захваченный устройством захвата груза, может быть перемещен установкой для перемещения грузов из одного места в другое место.
Понятие «канат» следует понимать обобщенно. При этом речь идет о продолговатом гибком элементе, нагружаемом на растяжение и наматываемом на лебедку. в случае каната речь может идти соответственно о канате в более узком смысле, н-р, о стальном тросе, но и о ленте или цепи или тому подобном. Все это для языкового упрощения объединяется под понятием каната. Это имеет силу как для канатов позиционирования, так и для нижеуказанных подъемных канатов и управляющих канатов.
Соответствующий канат может быть выполнен как одиночный канат. Соответственно здесь для каната используется, по существу, единственное число. Разумеется, соответствующий канат, обозначенный для речевой простоты в единственном числе, может быть реализован также и с помощью нескольких, в частности, проходящих параллельно друг к другу канатов или с помощью пакета канатов. Кроме этого, точно также возможно, одиночные канаты или несколько из канатов направлять, соответственно, выполнять, н-р, в форме полиспаста. Это в рамках изобретения может адаптироваться к соответствующим постановкам задачам и учитываемым там случаям нагрузки. Это также имеет силу как для канатов позиционирования, так и для упомянутых ниже подъемных канатов и управляющих канатов.
Носитель груза - это часть, за которую цепляются канаты позиционирования своим концом, обращенным от соответствующего подвесного устройства. Таким образом, носитель груза висит с помощью канатов позиционирования на подвесных устройствах. Путем приведения в действие лебедок канатов позиционирования, то есть, иными словами, с помощью соответственной намотки или размотки соответствующего каната позиционирования на, соответственно, с соответствующей лебедки каната позиционирования, носитель груза может быть передвинут в рабочем пространстве или над рабочим пространство. При этом ясно, что, как правило, необходимо все канаты позиционирования наматывать или разматывать, чтобы перемещать носитель груза. В уровне техники это известно и не требует дальнейшего пояснения.
Устройство захвата груза - это часть установки для перемещения грузов, служащая для крепления груза на носителе груза. Речь может идти, н-р, о крюке или механическом или магнитном захвате, ковше или тому подобном, в зависимости от того, какого рода груз должен быть перемещен установкой для перемещения грузов. Если в случае грузов речь идет об одиночных предметах, то часто предлагаются крюк или грейферное приспособление в качестве соответствующего устройства захвата груза. Напротив, если в случае транспортируемого груза речь идет о сыпучем материале, таком как, н-р, гравий или песок, то устройством захвата груза может быть ковш, захват для гравия или тому подобное. Если в случае груза речь идет о жидкости, то устройством захвата груза может быть, н-р, соответствующий сосуд, в который может приниматься жидкость. Здесь не устанавливается узких границ для реализации изобретения. Для реализации изобретения могут быть использованы практически все известные в уровне техники и пригодные для соответствующей области применения устройства захвата груза.
Соответствующие изобретению установки для перемещения грузов могли бы также называться как канатные роботы.
Соответствующие изобретению установки для перемещения грузов имеют, по меньшей мере, три каната позиционирования и соответственно также, по меньшей мере, три расположенных на расстоянии друг от друга подвесных устройства. Однако изобретение проявляет себя особенно хорошо, в частности, тогда, когда установка для перемещения грузов имеет более трех канатов позиционирования, то есть, н-р, четыре, пять или шесть канатов позиционирования и соответствующее число подвесных устройств. Подвесные устройства устанавливаются, предпочтительно, но не непременно, максимально равномерно на расстоянии друг от друга, н-р, так, чтобы они на виде сверху располагались соответственно в углах замкнутой ломаной линии (многоугольный подвес). При трех подвесных устройствах это треугольник, при четырех подвесных устройствах - четырехугольник, предпочтительно квадрат или прямоугольник, при пяти подвесных устройствах - пятиугольник и т.д.
Подвесные устройства - это приспособления, на которых подвешен, по меньшей мере, соответствующий один из канатов позиционирования. Для формирования подвесных устройств на соответствующей территории, соответственно, в соответствующей области, в которой должна работать установка для перемещения грузов, могут быть использованы уже имеющиеся возможности для подвешивания. Это могут быть, например, в случае зданий, уже имеющиеся стены или в случае естественного рельефа местности – отвесные скалы, скальные выступы или прочие, предпочтительно расположенные на возвышенности по сравнению с окружающим пространством точки. Но также может быть предусмотрено, чтобы, по меньшей мере, одно из подвесных устройств, предпочтительно все подвесные устройства, имело, соответственно, имели, по меньшей мере, одну мачту или башню, причем на мачте или башне расположены лебедка каната позиционирования и/или направляющий канатный ролик для висящего на соответствующем подвесном устройстве каната позиционирования. При этом также возможно разместить лебедку каната позиционирования на возвышающейся или также на самой высокой точке мачты или башни. Тогда в этом случае можно, при определенных обстоятельствах, отказаться от направляющих канатных роликов для соответствующего каната позиционирования на соответствующем подвесном устройстве. Но также возможно располагать лебедку каната позиционирования еще ниже на соответствующем подвесном устройстве. Тогда, как правило, предпочтительно, если канат позиционирования направлен по направляющему канатному ролику подвесного устройства, который расположен на соответствующем подвесном устройстве над лебедкой каната позиционирования. Подвесные устройства могут быть выполнены стационарными, то есть жестко закрепленными в соответствующем основании, и также передвижными. Они, н-р, как показано в упомянутом вначале уровне техники, могут быть выполнены на передвижных подставках или могут быть перемещаемыми иным образом из одного положения в другое положение. Может быть предусмотрено, чтобы соответствующее подвесное устройство было закреплено в основании или только устанавливалось на соответствующее основание. Подвесные устройства могут иметь как опорные стойки (стойки, работающие на сжатие), так и растяжки (тяги, работающие на растяжение). У опорных стоек может быть предусмотрено, чтобы они стояли на основании лишь площадками приложения давления, при определенных обстоятельствах, только с защитой от бокового сползания. Растяжки могут быть закреплены в основании или иметь цоколь, который оснащен пригодным для восприятия соответствующих растягивающих сил весом и который лишь устанавливается на основание. В случае цоколя речь может идти о жестком теле, таком как, н-р, бетонное тело, но и, н-р, о емкости, заполняемой водой или другими жидкостями, или сыпучими материалами. Последняя имеет то преимущество, что цоколь в незаполненном состоянии является относительно легким и, следовательно, хорошо транспортируемым.
При использовании множественных канатных подвесов есть много возможностей. Так, н-р, может быть предусмотрено, чтобы все канаты позиционирования были соединены множественным канатным подвесом через соответствующий канатный соединитель с носителем груза, причем каждый из канатных соединителей на множественном канатном подвесе расположен с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей поворота, и все оси поворота канатных соединителей пересекаются в одной общей точке пересечения этого множественного канатного подвеса. Также и здесь предпочтительно предусмотрено, чтобы все оси поворота канатных соединителей пересекались всегда, то есть, в каждом произвольном рабочем положении, в общей точке пересечения множественного канатного подвеса.
В другой группе вариантов исполнения изобретения также может быть предусмотрено, что носитель груза имеет продолговато протяженную несущую траверсу, а множественный канатный подвес расположен на несущей траверсе, предпочтительно, на конце несущей траверсы. У таких вариантом исполнения может быть предусмотрено, н-р, что носитель груза имеет одиночный канатный подвес, которым одиночный другой из канатов позиционирования соединен с носителем груза, причем одиночный канатный подвес расположен на несущей траверсе на расстоянии от множественного канатного подвеса, предпочтительно на противоположном множественному канатному подвесу конце несущей траверсы. Но также возможно, что носитель груза имеет, по меньшей мере, один следующий множественный канатный подвес, которым, по меньшей мере, два других из канатов позиционирования соединены с носителем груза, причем множественные канатные подвесы расположены на несущей траверсе на расстоянии друг от друга, предпочтительно на противолежащих друг другу концах несущей траверсы. То есть, иными словами, также возможно, что канаты позиционирования сгруппировано закреплены через соответствующее число множественных канатных подвесов на носителе груза. Причем упомянутые следующие множественные канатные подвесы могут быть выполнены, как уже описанные множественные канатные подвесы. То есть, в частности, возможно, что упомянутые по меньшей мере два других из канатов позиционирования соединены через соответствующий следующий канатный соединитель упомянутым следующим множественным канатным подвесом с носителем груза, причем каждый из этих следующих канатных соединителей расположен с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей поворота на следующем множественном канатном подвесе, и все оси поворота следующих канатных соединителей пересекаются в одной общей точке пересечения этого следующего множественного канатного подвеса.
Предпочтительно предусмотрено, что канатные соединители выполнены каждый как продолговато протяженное и/или жесткое само по себе тело. Чтобы добиться максимально больших углов поворота канатных соединителей, особо предпочтительные варианты предусматривают, что канатные соединители сформированы L-образно или C-образно. В любом случае предпочтительно, когда на первом конце соответствующего канатного соединителя закреплен соответствующий канат позиционирования, а канатный соединитель вторым, противоположным первому концу, концом размещен с возможностью поворота на множественном канатном подвесе.
Множественные канатные подвесы могут иметь различные формы исполнения. Так, н-р, может быть предусмотрено, что, по меньшей мере, два из канатных соединителей размещены на множественном канатном подвесе посредством по меньшей мере двух перпендикулярных друг другу осевых болтов с возможностью поворота вокруг упомянутых по меньшей мере двух ориентированных перпендикулярно друг другу осей поворота. При этом предпочтительно предусмотрено, что соответствующий канатный соединитель установлен с возможностью поворота вокруг первой из осей поворота на первом из осевых болтов, и первый из осевых болтов со вторым из осевых болтов установлен с возможностью поворота вокруг второй из осей поворота. В особо предпочтительных вариантах исполнения также может быть реализована еще и третья ось поворота, н-р, таким образом, что первый из осевых болтов и второй из осевых болтов с возможностью поворота размещены в вилке, причем вилка является поворачиваемой, соответственно, вращаемой вокруг третьей оси поворота. При этом все три оси поворота пересекаются предпочтительно в общей точке пересечения множественного канатного подвеса.
Другой вариант исполнения для множественного канатного подвеса предусматривает, что множественный канатный подвес для каждого из установленного на нем с возможностью поворота канатного соединителя имеет имеющую форму участка дуги окружности направляющую, по которой соответствующий канатный соединитель направляется для поворачивания вокруг первой из перпендикулярных осей поворота, и имеющие форму участка дуги окружности направляющие для поворачивания соответствующих канатных соединителей вокруг второй из ориентированных перпендикулярно друг другу осей поворота являются поворачиваемыми вокруг общего осевого болта. Эти варианты множественного канатного подвеса особенно предпочтительны тогда, когда с носителем груза должны быть соединены четыре, пять или более канатов позиционирования.
В принципе, при реализации изобретения крепление устройства захвата груза на носителе груза может быть выполнено так, как известно в уровне техники.
В смысле упомянутой вначале задачи достижения максимально большого рабочего пространства между подвесными устройствами особо предпочтительные варианты исполнения изобретения предусматривают, однако, что установка для перемещения грузов имеет лебедку подъемного каната и подъемный канат, причем подъемный канат является наматываемым и разматываемым лебедкой подъемного каната, а устройство захвата груза с помощью подъемного каната висит на носителе груза и является поднимаемым и опускаемым относительно носителя груза.
Благодаря подвешиванию устройства захвата груза на носителе груза посредством подъемного каната и благодаря возможности поднимать и опускать устройство захвата груза подъемным канатом относительно носителя груза, рабочее пространство установки для перемещения грузов дополнительно увеличивается по сравнению с уровнем техники, в частности, в краевых областях по направлению к соответствующим подвесным устройствам. Установкой для перемещения грузов грузы могут быть надежно и контролируемо перемещены между подвесными устройствами даже в области, близкой к краям.
Следующее преимущество заключается в том, что установка для перемещения грузов может быть использована лучшим образом при поверхностях местности с сильной поверхностной топографией, соответственно, с неспокойным рельефом, то есть, в областях, в которых между подвесными устройствами образованы холмы или другие возвышенности и/или низины и/или другие понижения местности. У установок для перемещения грузов согласно уровню техники при очень неспокойном рельефе, соответственно, сильной поверхностной топографии определенные области между подвесными устройствами вообще не могут быть достигнуты устройством захвата груза. В противоположность этому, поднимаемое и опускаемое подвешивание устройства захвата груза на носителе груза с помощью подъемного каната делает возможной также и при неспокойной топографии поверхности, соответственно, сильном поверхностном рельефе перемещение грузов без больших ограничений между различными положениями.
Чтобы канат позиционирования «набегал» под максимально оптимальным углом, то есть, максимально под перпендикулярным углом на лебедку каната позиционирования, соответственно, сходил с нее, предпочтительные варианты изобретения предусматривают, что лебедка(и) каната позиционирования расположена, соответственно, расположены каждая с возможностью поворота на соответствующем подвесном устройстве. При этом речь может идти о свободной поворачиваемости, при которой натяжение на канате позиционирования обеспечивает соответствующее поворачивание лебедки каната позиционирования. Однако, также может быть предусмотрено, что лебедка(и) каната позиционирования выполнена, соответственно, выполнены с возможностью поворота моторизованным приводом. В этих вариантах исполнения привод, такой, как, н-р, мотор и/или соответствующая передача, способствовал целенаправленному поворачиванию лебедки каната позиционирования, чтобы ориентировать ее для оптимального захода, соответственно, схода каната позиционирования. Поворачиваемость лебедки каната позиционирования особо предпочтительна тогда, когда, либо не имеется никакого направляющего канатного ролика на соответствующем подвесном устройстве, то есть, канат позиционирования проходит прямо от лебедки каната позиционирования к носителю груза. Если, в противоположность этому, имеется соответствующий направляющий канатный ролик для каната позиционирования на подвесном устройстве, то тогда предпочтительно, если лебедка каната позиционирования соответственно поворачиваема, предпочтительно приводом от мотора, когда направляющий канатный ролик расположен относительно близко к лебедке каната позиционирования. Но размещение с возможностью поворота может быть реализовано не только для лебедки каната позиционирования, но и, равным образом, также для лебедки подъемного каната и при имеющейся при определенных обстоятельствах лебедке управляющего каната для ниженазванного управляющего каната, чтобы и там достичь упомянутых преимуществ в соответствующим образом адаптированной форме.
Предпочтительные варианты предусматривают, что устройство захвата груза имеет, по меньшей мере, один направляющий канатный ролик для перенаправления подъемного каната. В частности, с использованием такого направляющего канатного ролика может быть предусмотрено, н-р, чтобы подъемный канат был проведен между носителем груза и устройством захвата груза через полиспаст, чтобы иметь возможность достигать больших усилий, в частности, при подъеме груза, расположенного на устройстве захвата груза. При формировании полиспаста также уменьшаются возникающие в подъемном канате усилия в канате соответственно отношению, получающемуся в результате перепасовывания. Таким образом, подъемный канат можно выполнить легче и тоньше. Этим оказывается меньшее влияние на равновесие сил канатов позиционирования. Благодаря этому также одновременно достигается увеличение рабочего пространства, поскольку так носитель груза ближе подводится к подвесному устройству, которое располагается диагонально противоположно подвесному устройству с лебедкой подъемного каната.
В первой группе вариантов исполнения лебедка подъемного каната может быть расположена на одном из подвесных устройств. Тогда носитель груза может иметь отклоняющий канатный ролик, причем подъемный канат проведен от лебедки подъемного каната через отклоняющий канатный ролик к устройству захвата груза. Лебедка подъемного каната может быть выполнена, как уже пояснялось выше в отношении лебедки каната позиционирования, с возможностью поворота, предпочтительно с расположением на подвесном устройстве. Также и здесь возможна свободная поворачиваемость лебедки подъемного каната или поворачиваемость с моторизованным приводом. Также и здесь эта поворачиваемость может быть использована для того, чтобы подъемный канат всегда под максимально перпендикулярным углом наматывался на лебедку подъемного каната, соответственно, с нее разматывался.
Альтернативно и в другой группе вариантов исполнения лебедка подъемного каната может быть расположена также на носителе груза. Для этого может быть предусмотрено, чтобы для снабжения приводного мотора лебедки подъемного каната электрической энергией, по меньшей мере, в один из канатов позиционирования был встроен провод для энергоснабжения. Точно также возможно, чтобы этот провод для энергоснабжения был проложен как отдельный провод к лебедке подъемного каната. В случае встраивания в один из канатов позиционирования можно обратиться к известным технологиям. Так, провод для энергоснабжения или провода для энергоснабжения может быть вплетен или могут быть вплетены как электропроводные, снаружи электро-изолированные жилы в соответствующий канат позиционирования. Также возможны комбинированные варианты, при которых провод для энергоснабжения интегрирован, соответственно, провода для энергоснабжения интегрированы на одном участке в канат позиционирования и проведен, соответственно, проведены к лебедке подъемного каната на другом участке в виде отдельного провода.
Устройство захвата груза может быть выполнено как сам по себе жесткий компонент, как, н-р, грузовой крюк. Но в других вариантах исполнения устройство захвата груза может иметь также приводимый в действие исполнительный орган. Он может быть выполнен, н-р, для крепления груза на устройстве захвата груза. Этот исполнительный орган может иметь привод, в принципе, от местного мотора. Однако, предпочтительные варианты предусматривают, чтобы, по меньшей мере, один управляющий канат установки для перемещения грузов для приведения в действие исполнительного орган был проведен предпочтительно через носитель груза к устройству захвата груза. При этом речь может идти об одном управляющем канате или нескольких управляющих канатах. Они могут управлять одним или несколькими исполнительными органами или, при случае, также несколькими функциями одного исполнительного органа.
Канаты позиционирования проходят, в частности, с учетом их соответственного провисания предпочтительно в вертикальных плоскостях между соответствующим подвесным устройством и носителем груза. Эти вертикальные плоскости задаются соответствующим канатом позиционирования. Если также подъемные канаты и/или управляющие канаты и/или провода для электроснабжения должны быть проложены от носителя груза к подвесному устройству, то предпочтительно предусмотрено, что подъемный канат и/или управляющий канат и/или провод для электроснабжения проведен в той же самой вертикальной плоскости, что и проложенный между соответствующим подвесным устройством и носителем груза канат позиционирования. При этом очевидно, что соответственная вертикальная плоскость смещается, если задающий ее канат позиционирования при движении носителя груза изменяет свой ход.
Другие признаки и особенности предпочтительных вариантов исполнения изобретения примерно поясняются в нижеследующем описании фигур. Показывают:
фиг.1 схематичное изображение размера рабочего пространства установки для перемещения грузов согласно уровню техники;
фиг.2 схематичное изображение размера рабочего пространства для соответствующей изобретению установки для перемещения грузов;
фиг.3-8 схематичные общие виды соответствующего изобретению варианта исполнения установки для перемещения грузов;
фиг.9-12 изображения первого варианта исполнения носителя груза и устройства захвата груза для установки для перемещения грузов по фиг.3-8;
фиг.13 измененный вариант исполнения носителя груза и устройства захвата груза на основе показанного на фиг.9-12 варианта исполнения;
фиг.14-16 третий вариант исполнения носителя груза с устройством захвата груза для установки для перемещения грузов согласно фиг.3-8;
фиг.17-19 вариант исполнения носителя груза и устройства захвата груза для установки для перемещения грузов с пятью канатами позиционирования;
фиг.20 и 21 изображения следующей соответствующей изобретению установки для перемещения грузов;
фиг.22 вариант того, как подвесные устройства могут быть соединены друг с другом;
фиг.23 и 24 соответственно вариант исполнения носителя груза для соответствующей изобретению установки для перемещения грузов с единственным множественным канатным подвесом для всех канатов позиционирования;
фиг.25 и 26 следующий соответствующий изобретению пример исполнения установки для перемещения грузов;
фиг.27-32 изображения примеров возможных вариантов исполнения подвесных устройств и лебедок канатов позиционирования для соответствующих изобретению установок для перемещения грузов.
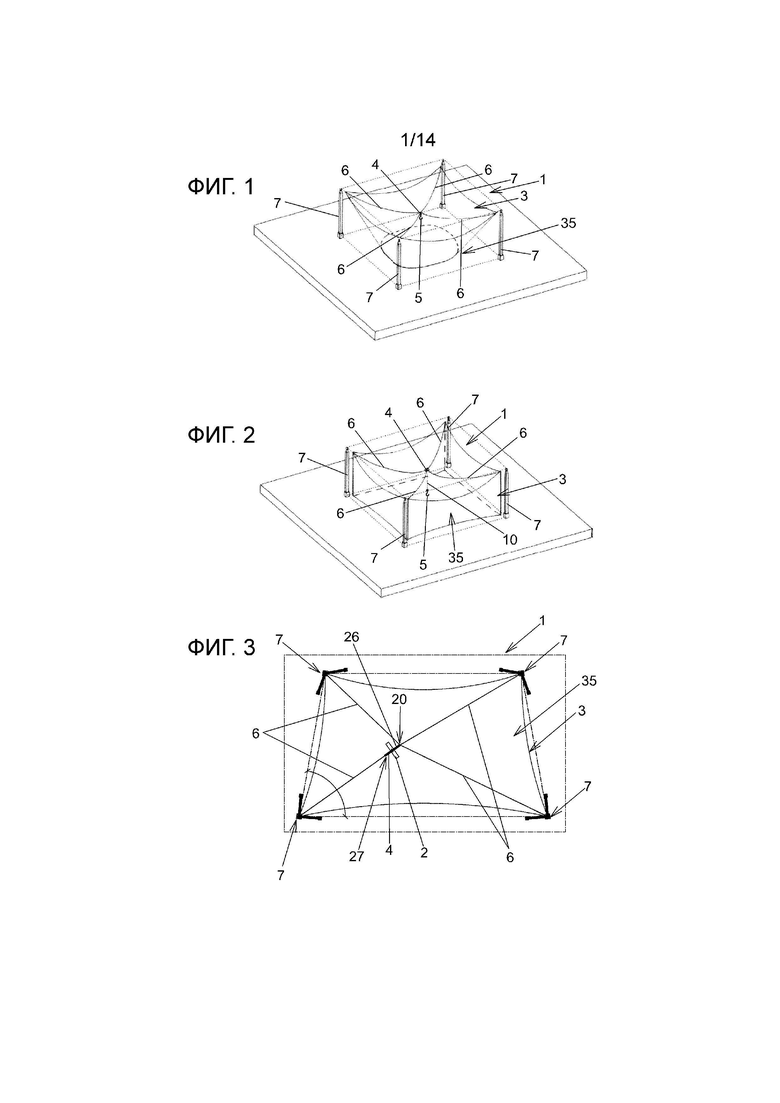
Изображенная на фиг.1 установка для перемещения грузов согласно уровню техники имеет четыре выполненных в форме мачт подвесных устройства 7, на которых подвешены соответственно канаты 6 позиционирования. Все канаты 6 позиционирования проходят от соответствующего подвесного устройства 7 к носителю 4 груза. Согласно уровню техники выполненное здесь как крюк устройство 5 захвата груза зафиксировано прямо на носителе 4 груза. С помощью наматывания и разматывания канатов 6 позиционирования на не изображенные здесь лебедки 8 канатов позиционирования, носитель 4 груза вместе с устройством 5 захвата груза может перемещаться в области между подвесными устройствами 7, чтобы захватывать грузы 2, перемещать на другое место и снова укладывать на поверхность 35 местности. При этом в уроне техники носитель 4 груза вместе с устройством 5 захвата груза должен быть перемещен непосредственно вплоть до груза, чтобы груз мог быть закреплен на устройстве 5 захвата груза и перемещен на другое место. То же самое действительно для выгрузки груза 2 на другом месте. При этом рабочее пространство 3 описывает частичную область, соответственно, частичны объем общего объема между подвесными устройствами 7, в котором груз может быть захвачен носителем 4 груза и устройством 5 захвата груза и перемещен на другое место.
В уровне техники, в котором устройство 5 захвата груза жестко закреплено на носителе 4 груза, рабочее пространство 3, как схематично изображено на фиг.1, ограничено центральной областью. Частичные области вне этой центральной области не могут быть достигнуты носителем 4 груза и устройством 5 захвата груза, чтобы там грузы 2 захватить или грузы 2 выгрузить. Обозначенное на фиг.1 рабочее пространство 3 в уровне техники сужается в направлении к поверхности 35 все больше в направлении к центру между подвесными устройствами 7.
Если в уровне техники перемещают носитель 4 груза с устройством 5 захвата груза в краевые области пространства между подвесными устройствами 7, то это из-за провисающих областей канатов 6 позиционирования и из-за обусловленного подвешиванием на канатах 6 позиционирования опрокидывания носителя 4 груза в уровне техники возникают неконтролируемые больше и также неуправляемые и непредсказуемые состояния, поэтому в уровне техники, как изображено на фиг.1, рабочее пространство 3 ограничено именно центральной областью между подвесными устройствами 7.
Фиг.2 схематично показывает, как при в остальном одинаковой конструкции как на фиг.1, устройство 5 захвата груза висит с помощью подъемного каната 10 на носителе 4 груза, причем благодаря соответственному наматыванию и разматыванию подъемного каната 10 на, соответственно, с не изображенной здесь лебедки 9 подъемного каната, устройство 5 захвата груза поднимаемо и опускаемо относительно носителя 4 груза. Это ведет к существенному увеличению рабочего пространства 3, как это изображено на фиг.2. Рабочее пространство 3 у изобретения уже не ограничено, как изображено на фиг.1, центральной областью, а простирается гораздо дальше в краевые области рядом с подвесным устройством 7, чем в уровне техники. В частности, в краевых областях путем соответственного наматывания и разматывания канатов 6 позиционирования носитель 4 груза может быть расположен в относительно высоком положении над поверхностью 35. Лежащий в этой краевой области груз 2 путем спуска устройства 5 захвата груза при помощи подъемного каната 10 от носителя груза 4 все еще может быть достигнут и захвачен или соответственно выгружен и в этих краевых областях. Разумеется, при этом не ограничиваются расположением, очень схематично изображенным на фиг.2, с четырьмя подвесными устройствами 7 и соответственно четырьмя канатами 6 позиционирования. Изобретение, как указано вначале, может быть реализовано также и для установок 1 перемещения грузов только с тремя канатами 6 позиционирования и соответственно также только с тремя подвесными устройствами 7, но и, прежде всего, также с более, чем тремя, то есть, с четырьмя, пятью или шестью и т.д. канатами 6 позиционирования и подвесными устройствами 7. При этом подвесные устройства 7 стоят, смотря на виде сверху на поверхность 35, предпочтительно в углах воображаемой замкнутой ломаной, которая является при трех подвесных устройствах 7 соответственно треугольником, при четырех подвесных устройствах 7, предпочтительно прямоугольником или квадратом, выражаясь обобщенно, четырехугольником, при пяти подвесных устройствах 7 - пятиугольником и т.д.
Соответствующее изобретению мероприятие по формированию рабочего пространства 3 максимально большим между подвесными устройствами 7, предусматривает, как уже пояснялось вначале, чтобы носитель 4 груза имел, по меньшей мере, один множественный канатный подвес 20, как будет пояснено далее еще раз с помощью примеров исполнения. Благодаря использованию таких множественных канатных подвесов 20 носитель 4 груза может быть перемещен гораздо лучше в краевые области вблизи подвесного устройства 7, при этом это не ведет к сложно управляемым, соответственно, контролируемым состояниям. Эти множественные канатные подвесы 20 также при раскачивании груза 2 на носителе 4 груза обеспечивают развязку, так что канаты 6 позиционирования также за счет этого не приводятся в маятниковое движение из-за раскачивания груза 2.
Следующее преимущество соответствующих изобретению установок 1 для перемещения грузов по сравнению с уровнем техники проявляется тогда, когда поверхность 35 местности неровная, а имеет соответственно неровную топографию, соответственно, неровный рельеф с возвышающимися областями и впадинами или низинами. В частности, при таких, более взыскательных формах поверхности 35 местности с помощью соответствующих изобретению установок 1 для перемещения грузов по сравнению с уровнем техники можно гораздо лучше охватывать все имеющееся в распоряжении пространство устройствами 5 захвата груза и, таким образом, использовать, чтобы там забирать или выгружать грузы 2.
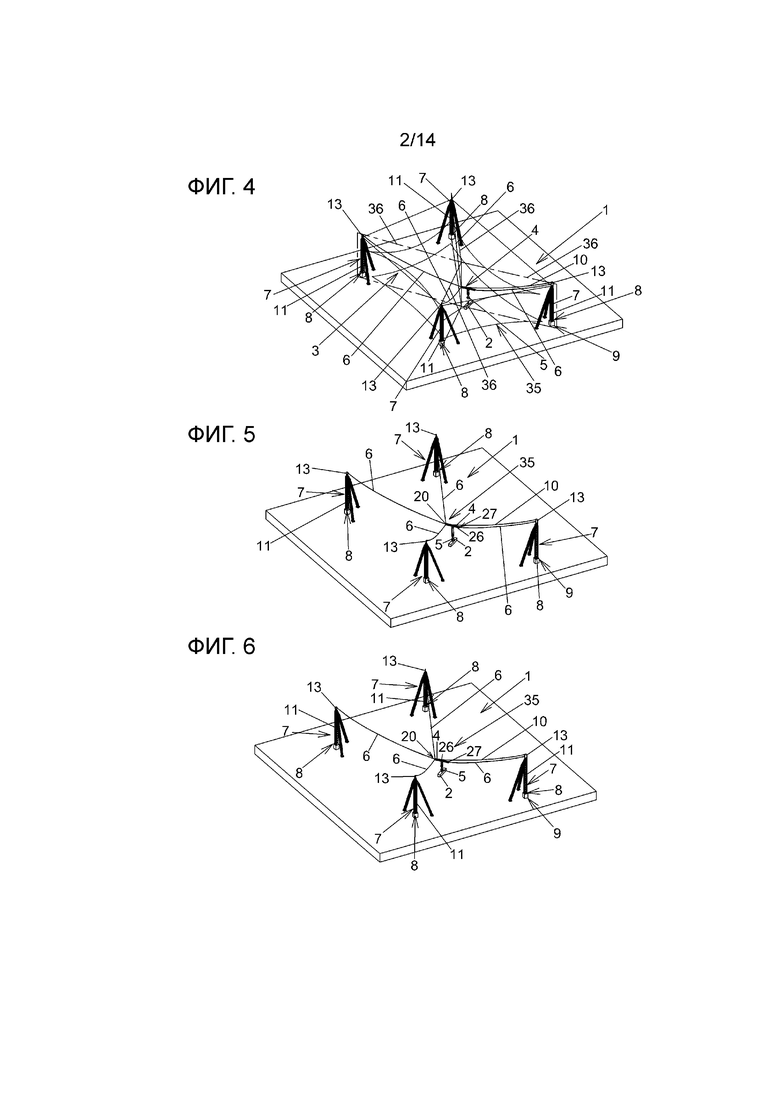
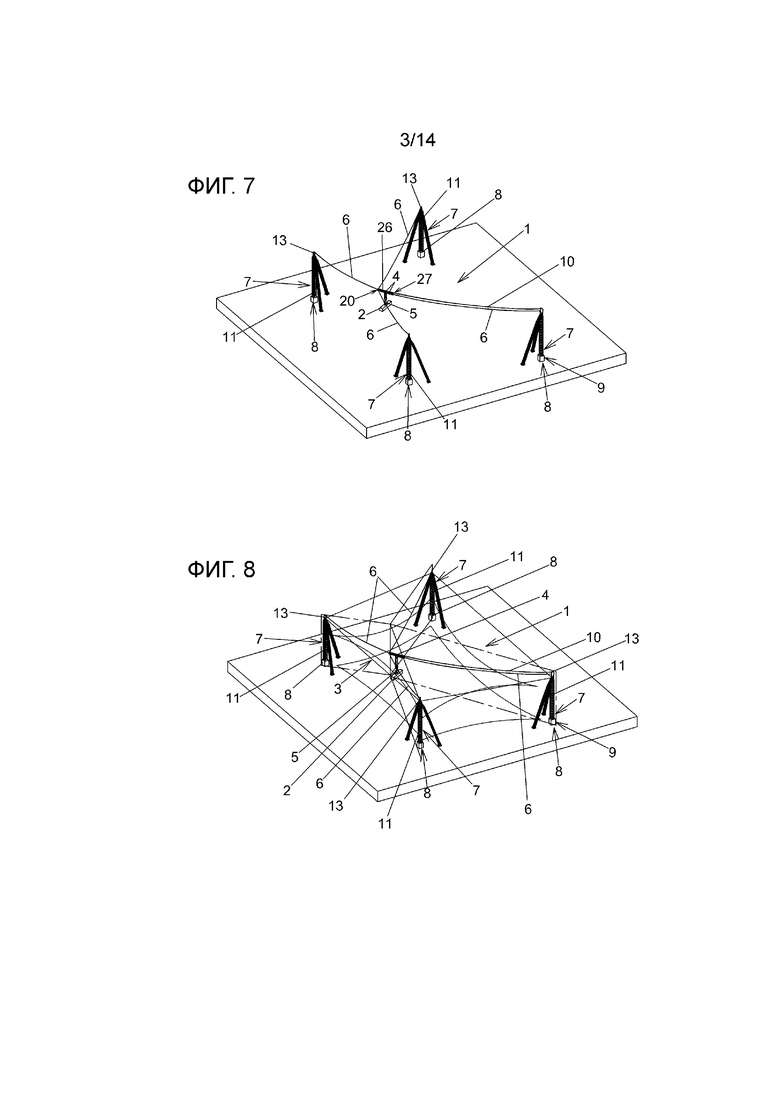
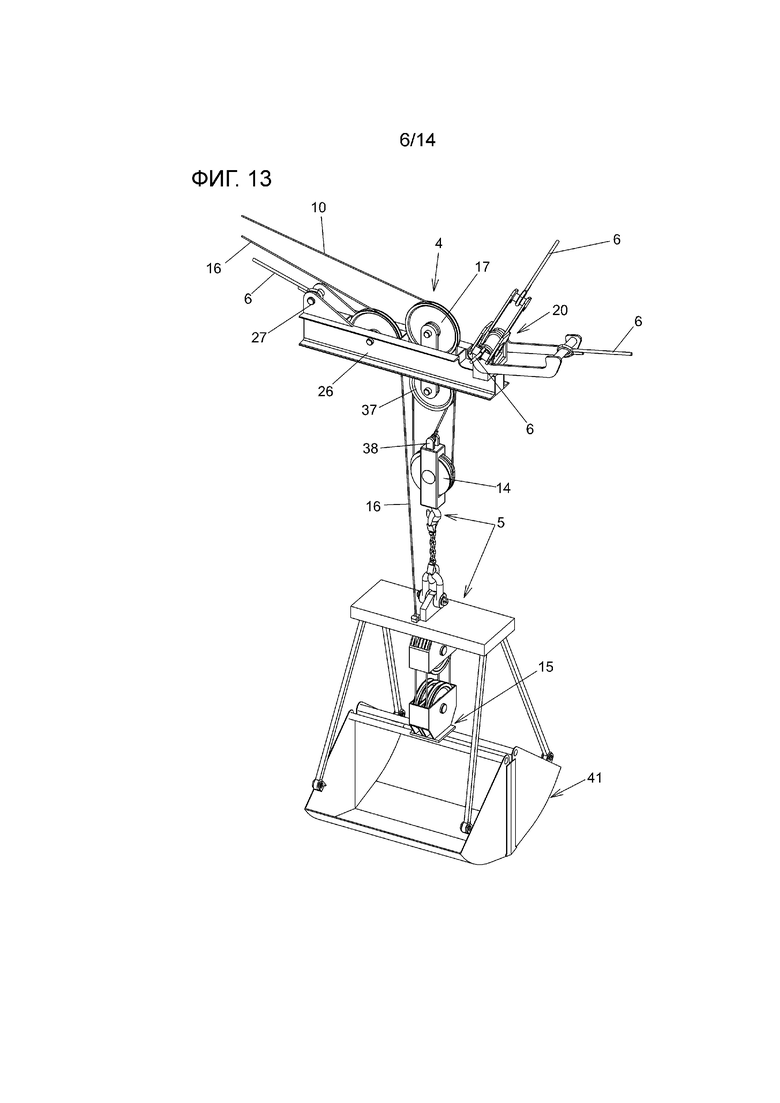
Фиг.3-8 показывают первый пример исполнения соответствующей изобретению установки 1 для перемещения грузов на схематичных общих видах. Фиг.3 показывает вид сверху. Фиг.4-8 схематично показывают на видах в перспективе под углом сверху, как груз 2 в первом положении внутри рабочего пространства 3 захватывается устройством 5 захвата груза, перемещается в другое место внутри рабочего пространства 3 и там снова выгружается на поверхность 35 местности. Установка 1 для перемещения грузов, которая показана на фиг.3-8, имеет четыре выполненных в форме мачтовых систем подвесных устройства 7 и соответствующее число канатов 6 позиционирования. Носитель 4 груза висит с помощью канатов 6 позиционирования на подвесных устройствах 7. Каждое подвесное устройство 7 имеет лебедку 8 каната позиционирования для наматывания и разматывания соответствующего каната 6 позиционирования. Лебедки 8 канатов позиционирования явственно не изображены на фиг.3-8. Для возможных вариантов исполнения ниже дается ссылка на более детальные исполнения на основе фиг.26-32. В показанном здесь примере исполнения согласно фиг.3-8 канаты 6 позиционирования проложены соответственно от лебедки 8 каната позиционирования по направляющему канатному ролику 13 на соответствующем подвесном устройстве 7. Три из канатов 6 позиционирования закреплены через множественный канатный подвес 20 и предусмотренной в этом первом примере исполнения несущей траверсой 26 носителя 4 груза. Четвертый канат 6 позиционирования закреплен через одиночный канатный подвес 27 на носителе груза 4, соответственно, его несущей траверсе 26. Различные примеры, как такие носители 4 груза конкретно могут быть реализованы, будут рассмотрены ниже с помощью нижеследующих фигур.
В этом примере исполнения также предусмотрено, чтобы сформированное здесь как крюк устройство 5 захвата груза висело с помощью подъемного каната 10 на носителе 4 груза и так было поднимаемым и опускаемым относительно носителя груза. Подъемный канат 10 является наматываемым на лебедку 9 подъемного каната. Лебедка 9 подъемного каната находится в этом первом примере исполнения на одном из подвесных устройств 7, как это ясно показано, н-р, на фиг.27 и пояснено ниже. Подъемный канат 10 направлен предпочтительно вдоль одного из канатов 6 позиционирования к соответствующему подвесному устройству 7. Каждый из канатов 6 позиционирования задает своим провесом вертикальную плоскость 36. Эти вертикальные плоскости 36 показаны для примера на фиг.4 и 8, а на фиг.5-7 для наглядности не изображены. Подъемный канат 10 в предпочтительных вариантах исполнения, каковые здесь показаны, проходит в вертикальной плоскости 36, которая задана канатом 6 позиционирования, который проведен к тому же подвесному устройству 7, что и подъемный канат 10.
На фиг.3, 4 и 8 штриховано изображено рабочее пространство 3 этой установки 1 для перемещения грузов. На фиг.5, 6 и 7 оно для наглядности не нарисовано.
Благодаря соответственному наматыванию и разматыванию канатов 6 позиционирования на, соответственно, с соответствующих лебедок 8 канатов позиционирования носитель 4 груза на фиг.4 перемещен в, соответственно, над рабочим пространством 3 так, чтобы устройство 5 захвата груза, которое здесь выполнено в форме крюка, находилось над грузом 2. Теперь, чтобы груз 2 можно было захватить устройством 5 захвата груза, устройство 5 захвата груза отпускается подъемным канатом 10 от носителя 4 груза вниз настолько, чтобы его можно было навесить на груз 2. Это состояние показано на фиг.5. Затем устройство 5 захвата груза вместе с подвешенным на нем грузом 2 поднимается, что представлено на фиг.6. Чтобы теперь груз 2 принести к новому положению внутри рабочего пространства 3, канаты 6 позиционирования 6 наматываются, соответственно, разматываются на своих соответствующих лебедках 8 канатов позиционирования, таким образом, носитель 4 груза вместе с висящим на нем устройством 5 захвата груза и грузом 2 перемещается в новое расположение, как это представлено в качестве примера на фиг.7. При этом носитель 4 груза может находиться внутри, но также и над рабочим пространством 3. Чтобы теперь выгрузить груз 2 в этом новом расположении в рабочем пространстве 3 на поверхность 35 местности, устройство 5 захвата груза вместе с висящим на нем грузом 2 опускается подъемным канатом 10 от носителя груза 4, что изображено на фиг.8. Затем устройство 5 захвата груза может быть отделено от груза 2, поэтому следующий за этим рабочий процесс может быть проведен с помощью носителя 4 груза и устройства 5 захвата груза.
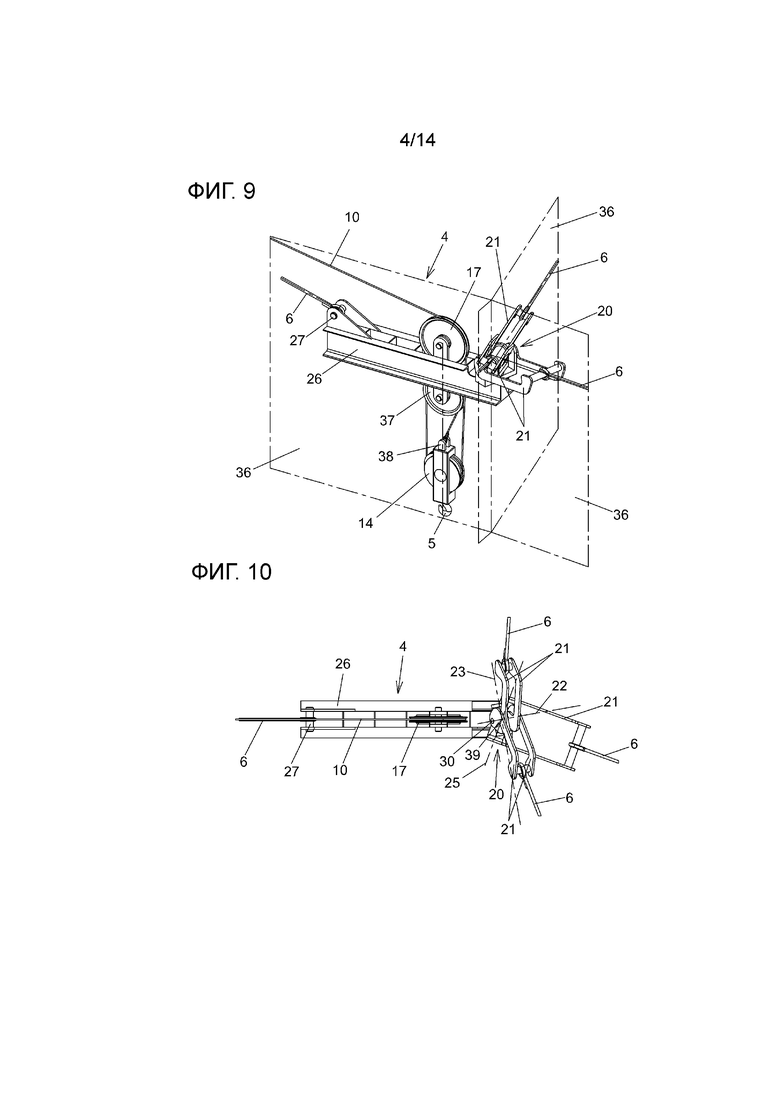
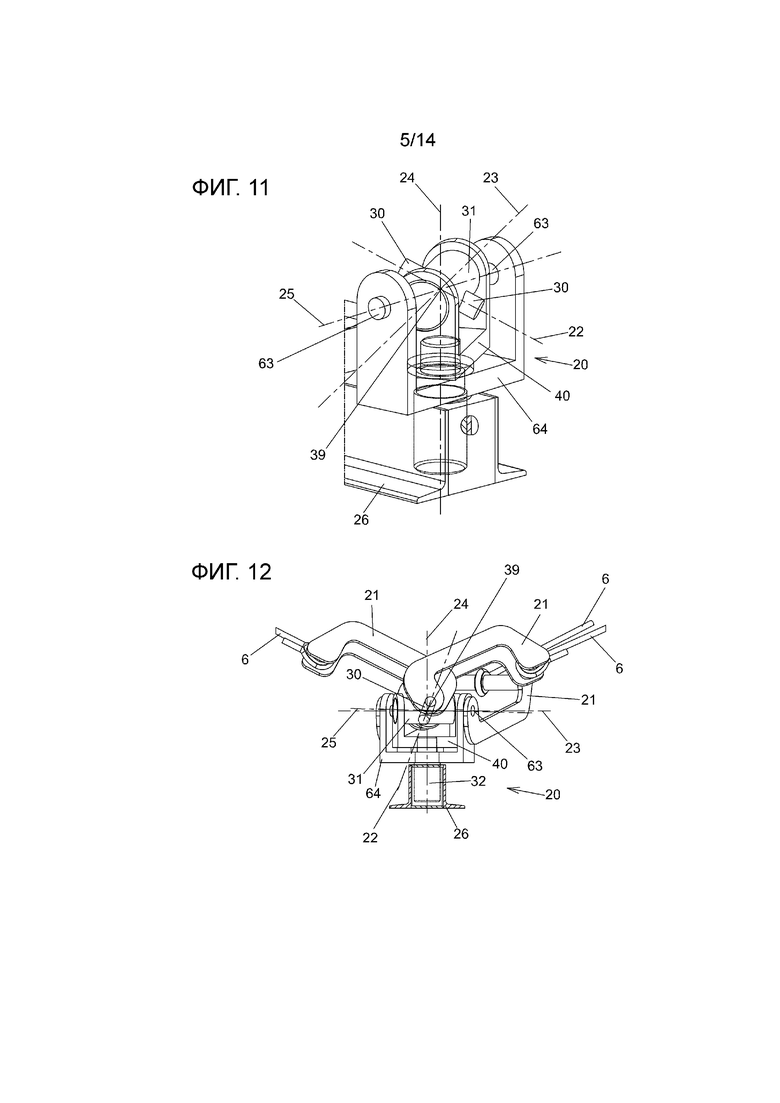
Фиг.9 показывает первый вариант исполнения носителя 4 груза и устройства 5 захвата груза, как они могут найти применение в примере исполнения согласно фиг.3-8. Носитель 4 груза имеет продолговато протяженную несущую траверсу 26. На этой несущей траверсе 26 в этом примере исполнения три из канатов 6 позиционирования закреплены через множественный канатный подвес 20. Предпочтительно множественный канатный подвес 20, как здесь и изображено, зацепляется за конец несущей траверсы 26. На противоположном конце несущей траверсы 26 закреплен четвертый из канатов 6 позиционирования посредством одиночного канатного подвеса 27. Одиночный канатный подвес 27 расположен на несущей траверсе 26 на расстоянии от множественного канатного подвеса 20. Он находится предпочтительно, как показано на этом примере исполнения, на противоположном множественному канатному подвесу 20 конце несущей траверсы 26. В одиночном канатном подвесе 27 подвешен канат 6 позиционирования с возможностью поворота вокруг оси. Кроме того, все канаты 6 позиционирования допускают определенный поворот вокруг их продольной оси. Множественный канатный подвес 20, такой, как реализованный здесь, более подробно поясняется ниже с помощью фиг.11 и 12. Однако следует указать на то, что также в этом примере исполнения у множественного канатного подвеса 20 каждый из зацепляющихся там канатов 6 позиционирования соединен через канатный соединитель 21 с носителем 4 груза, причем каждый из этих канатных соединителей 21, по меньшей мере, с двумя ориентированными перпендикулярно друг другу осями 22, 23, 24, 25 поворота, расположен на множественном канатном подвесе 20 с возможностью поворота, и все оси 22, 23, 24, 25 поворота канатных соединителей 21 пересекаются в общей точке 39 пересечения этого множественного канатного подвеса 20. Это имеет место предпочтительно всегда, то есть, во всех положениях, соответственно, рабочих состояниях первого носителя 4. Еще следует указать на то, что канатные соединители 21, как также показано в этом примере исполнения, сформированы предпочтительно продолговато протяженными. В случае канатных соединителей 21 речь предпочтительно идет о жестких телах. Особо предпочтительно канатные соединители 21 сформированы L-образно или C-образно. Первым концом канатные соединители 21 закреплены на соответствующем канате 6 позиционирования. Вторым, противоположным первому концу, концом канатные соединители 21 размещены с возможностью поворота на множественных канатных подвесах 20. В частности, благодаря L- или еще лучше C-образной форме возможен большой угол поворота соответствующего канатного соединителя 21 вокруг соответствующей оси 22, 23, 25 поворота множественного канатного подвеса 20.
Также на фиг.9 показаны вертикальные плоскости 36. Каждая из вертикальных плоскостей 36 задается одним из канатов 6 позиционирования и его провисанием, как это разъяснено выше. В множественном канатном подвесе 20 пересекаются по вертикальной линии пересечения вертикальные плоскости 36 канатов 6 позиционирования, которые вместе проведены в этом множественном канатном подвесе 20. На этой вертикальной линии пересечения лежит общая точка 39 пересечения осей 22, 23, 24 и 25 поворота, более подробно поясненная ниже.
Устройство 5 захвата груза в этом примере исполнения висит с помощью подъемного каната 10 на носителе 4 груза, поэтому оно поднимаемо и опускаемо относительно носителя 4 груза. В показанном примере исполнения устройство 5 захвата груза имеет простой крюк. Однако, оно может быть выполнено и в любой другой форме, н-р, как грейфер, как магнитное захватывающее устройство, как ковш или как-то еще. Во всяком случае, подъемный канат 10, как уже разъяснялось с помощью фиг.3-8, является наматываемым на лебедку 9 подъемного каната и разматываемым с нее, поэтому путем наматывания и разматывания подъемного каната 10 происходит подъем и опускание устройства 5 захвата груза относительно носителя 4 груза. В принципе, возможно, чтобы подъемный канат 10 был проведен между устройством 5 захвата груза и носителем 4 груза как одинарный канат. В показанном примере исполнения устройство 5 захвата груза имеет направляющий канатный ролик 14 для направления подъемного каната 10. Так как лебедка 9 подъемного каната в этом примере исполнения расположена на одном из подвесных устройств 7, подъемный канат 10 в этом примере исполнения по отклоняющему канатному ролику 17 носителя груза 14 проведен к устройству 5 захвата груза. Вместе со следующим отклоняющим канатным роликом 37 и фиксацией 38 подъемного каната образуется полиспаст. Это является примером того, что устройство 5 захвата груза предпочтительно с помощью сформированного подъемным канатом 10 полиспаста висит на носителе 4 груза. Это особо предпочтительно тогда, когда необходимо поднять тяжелые грузы 2.
Фиг.10 показывает вид сверху на носитель 4 груза по фиг.9. На фиг.10 обозначены также штрихами оси 22, 23 и 25 поворота, которые с помощью принципиальных схем на фиг.11 и 12 будут пояснены подробнее. У множественного канатного подвеса 20 согласно фиг.9-12 предусмотрено, чтобы, по меньшей мере, два из канатных соединителей 21 посредством, по меньшей мере, двух перпендикулярных друг другу осевых болтов 30 и 31 были расположены с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей 22 и 23 поворота на множественном канатном подвесе 20. Эти два канатных соединителя 21 в показанном здесь примере исполнения согласно фиг.11 и 12 расположены на первом из осевых болтов 30 с возможностью поворота вокруг первой из осей 22 поворота. Первый из осевых болтов 30 со вторым из осевых болтов 31 расположен с возможностью поворота вокруг второй оси 23 поворота. Предпочтительно, как представлено здесь на фиг.11 и 12, предусмотрено, чтобы два из канатных соединителей 21 были расположены с возможностью поворота на общем осевом болте 30.
Третий канатный соединитель 21 этого примера исполнения расположен с возможностью поворота вокруг четвертой оси 25 поворота на третьем осевом болте 63. Третьи осевые болты 63 в этом примере исполнения выполнены на вилке 64. Эта вилка 64 расположена на несущей траверсе 26 с помощью осевого болта 32 с возможностью поворота вокруг оси 24 поворота.
Оба осевых болта 30 и 31 и, таким образом, зацепляющиеся с ними канатные соединители 21 расположены на вилке 40 с возможностью поворота вокруг оси 23 поворота. Дополнительно осевые болты 30 и 31 в этом, как и в других предпочтительных вариантах исполнения являются совместно поворачиваемыми с помощью вилки 40 вокруг третьей оси 24 поворота. Для этого вилка 40 в этом примере исполнения расположена на несущей траверсе 26 с возможностью поворота также с помощью осевого болта 32 вокруг оси 24 поворота. Однако, при этом следует указать на то, что обе вилки 40 и 64 независимо друг от друга являются поворачиваемыми вокруг оси 24 поворота. Эта независимая поворачиваемость вилок 40 и 64 может быть достигнута с помощью соответственно независимой установки на осевом болте 32. Но разумеется, также было бы возможным предусмотреть два независимо друг от друга вращаемых вокруг оси 24 поворота, расположенных коаксиально друг другу осевых болта, причем одна из вилок 40 и 64 была бы соединена с одним из осевых болтов. Все четыре оси 22, 23, 24 и 25 поворота пересекаются, в любом случае, в общей точке 39 пересечения.
На фиг.12 также можно видеть, как оба совместно поворачиваемых на осевом болте 30 вокруг оси 22 поворота канатных соединителя 21 выполнены C-образно. Дополнительно также и третий канатный соединитель 21 выполнен C-образно.
Фиг.13 показывает в качестве примера усовершенствованный вариант, основанный на носителе 4 груза и устройстве 5 захвата груза согласно фиг.9-12.
Отличие от ранее описанного примера исполнения заключается в исполнении устройства 5 захвата груза. Оно в этом примере исполнения состоит из уже известного из фиг.9-12 крюка и дополнительно из подвешенного на нем грейферного ковша 41, который можно использовать для того, чтобы перемещать сыпучий материал, такой как гравий, песок или тому подобное с одного места на другое место. Речь идет о примере, в котором устройство 5 захвата груза имеет приводимый в действие исполнительный орган 15, причем управляющий канат 16 установки 1 для перемещения грузов для приведения в действие исполнительного органа 15 направлен через носитель 4 груза к устройству 5 захвата груза. Исполнительный орган 15 в этом примере исполнения служит для открывания и закрывания грейферного ковша 41, как это хорошо известно. Управляющий канат 16 отклонен на несущей траверсе 26 через следующий направляющий канатный ролик 59 и оттуда направлен к лебедке управляющего каната, не изображенной здесь более подробно, которая, как и лебедка 9 подъемного каната и лебедки 8 канатов позиционирования может быть расположена на одном из подвесных устройств 7. Предпочтительно управляющий канат 16, как и подъемный канат 10, этого примера исполнения проходит между носителем 4 груза и подвесным устройством 7, на котором находится лебедка управляющего каната, в вертикальной плоскости 36, которая задается подвешенным на одиночном канатном подвесе 27 канатом 6 позиционирования. Разумеется, фиг.13 - это только один из многих примеров того, как с помощью управляющего каната 16 и исполнительного органа 15 на устройстве 5 захвата груза могут быть расположены активно приводимые в действие грейферы или тому подобное. Разумеется, и иначе выполненные исполнительные органы 15 могут приводиться в действие одним или несколькими соответствующими управляющими канатами 16 и соответственно могут быть предусмотрены на устройстве 5 захвата груза.
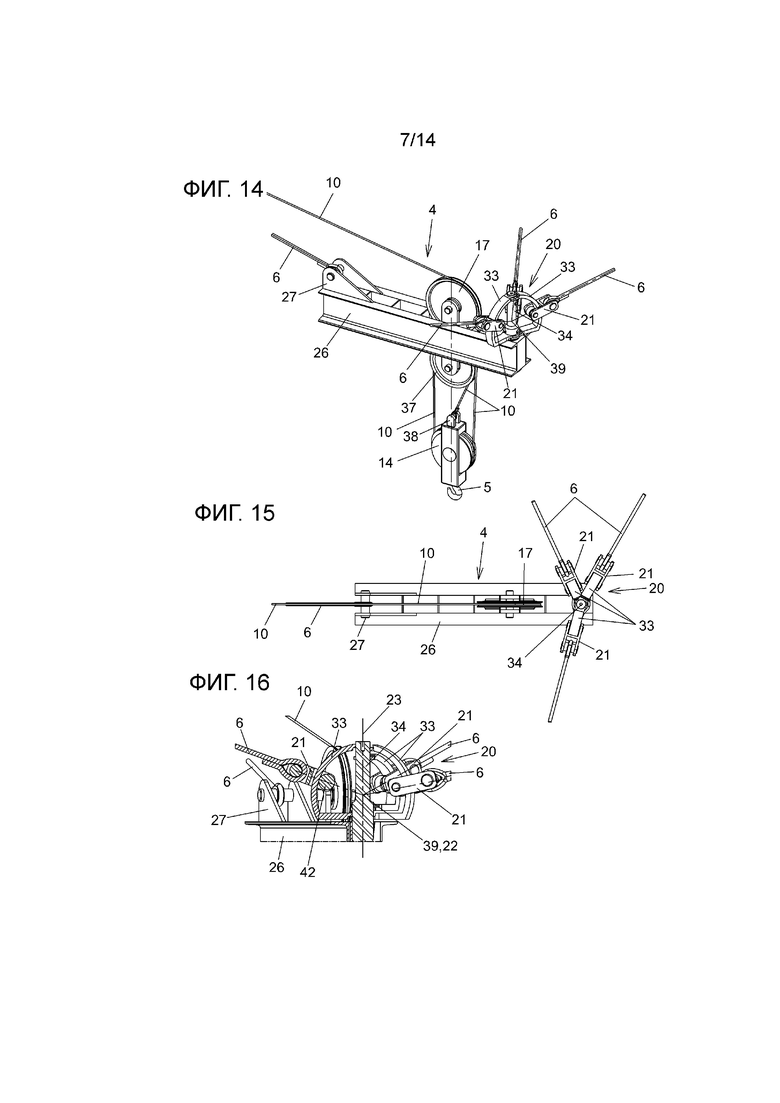
Фиг.14-16 показывают следующий возможный вариант исполнения носителя 4 груза, который может быть задействован в установке 1 для транспортировки грузов согласно фиг.3-8. Различия с примером исполнения согласно фиг.9-12 заключаются в виде исполнения множественного канатного подвеса 20, в котором сведены три из канатов 6 позиционирования. В остальном, носитель 4 груза фиг.14-16 выполнен так, как и носитель 4 груза фиг.9-12, поэтому не требуется подробнее рассматривать эти признаки. Фиг.14 показывает вид в перспективе на этот носитель 4 груза, фиг.15 - вид сверху. На фиг.16 особенно хорошо можно видеть вид исполнения множественного канатного подвеса 20. В случае фиг.16 речь идет об изображении с частичным разрезом. В любом случае, речь идет о примере исполнения, при котором множественный канатный подвес 20 для каждого из расположенных на нем с возможностью поворота канатных соединителей 21 имеет направляющую 33 в форме участка дуги окружности, по которой направлен соответствующий канатный соединитель 21 для поворота вокруг первой из ортогональных осей 22 поворота, а имеющая форму участки дуги окружности направляющая 33 соответствующего канатного соединителя 21 для поворота соответствующего канатного соединителя 21 вокруг второй из ориентированных перпендикулярно друг другу осей 22 поворота является поворачиваемой вокруг общего осевого болта 34. На фиг.16 в разрезе, соответственно, заштриховано изображены один из канатных соединителей 21 и его имеющая форму участка дуги окружности направляющая 33, а также осевой болт 34. Не в разрезе, соответственно, не заштриховано изображенные канатный соединитель 21 и имеющая форму участка окружности направляющая 33 выполнены аналогичным образом. На фиг.16 хорошо видно, что изображенный в разрезе канатный соединитель 21 с помощью ролика 42 может обкатываться на имеющей форму участка дуги окружности направляющей 33. Разумеется, вместо ролика 42 могла бы быть использована также плоскость скольжения или тому подобное. В любом случае так, чтобы с помощью соответствующей проводки этого канатного соединителя 21 на имеющей форму участка дуги окружности направляющей 33 этот канатный соединитель 21 являлся поворачиваемым вокруг оси 22 поворота, на фиг.16 расположенной по нормали к плоскости листа и проходящей через общую точку 39 пересечения. Перпендикулярная этому ось 23 поворота, которая проходит также через общую точку 39 пересечения, в этом примере исполнения - это продольная ось осевого болта 34. Канатные соединители 21 могут быть вместе с их соответствующими имеющими форму участка дуги окружности направляющими 33 повернуты вокруг общего осевого болта 34, и, тем самым, вокруг оси 23 поворота. Также и с помощью такого рода множественного канатного подвеса 20 достигается то, что каждый из канатных соединителей 21 расположен на множественном канатном подвесе 20 с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей 22 и 23 поворота, и все оси 22 и 23 поворота канатных соединителей пересекаются в общей точке 39 пересечения этого множественного канатного подвеса 20. У такого рода формы исполнения множественного канатного подвеса 20 предпочтительно предусмотрено, как здесь и показано, чтобы канатные соединители 21 были выполнены прямо.
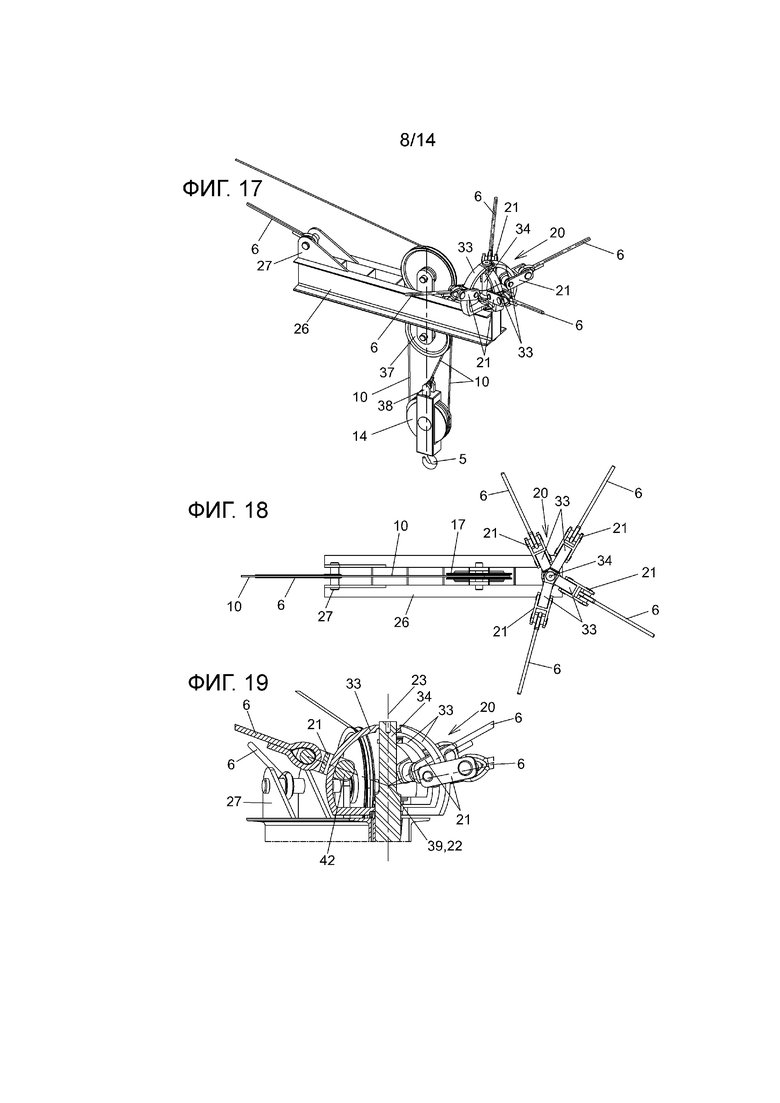
Такой вид множественного канатного подвеса 20 с имеющими форму участка дуги окружности направляющими 33 для соответствующих канатных соединителей 21 особо предпочтителен тогда, когда относительно много канатов 6 позиционирования должны быть совместно проведены в множественном канатном подвесе 20. Соответственно фиг.17-19 показывают пример, при котором четыре каната 6 позиционирования сведены в таком множественном канатном подвесе 20. В остальном, технология этого множественного канатного подвеса 20 и этого примера исполнения носителя 4 груза с устройством 5 захвата груза согласно фиг.17-19 соответствует варианту согласно фиг.14-16, поэтому во избежание повторения дается ссылка на сказанное выше.
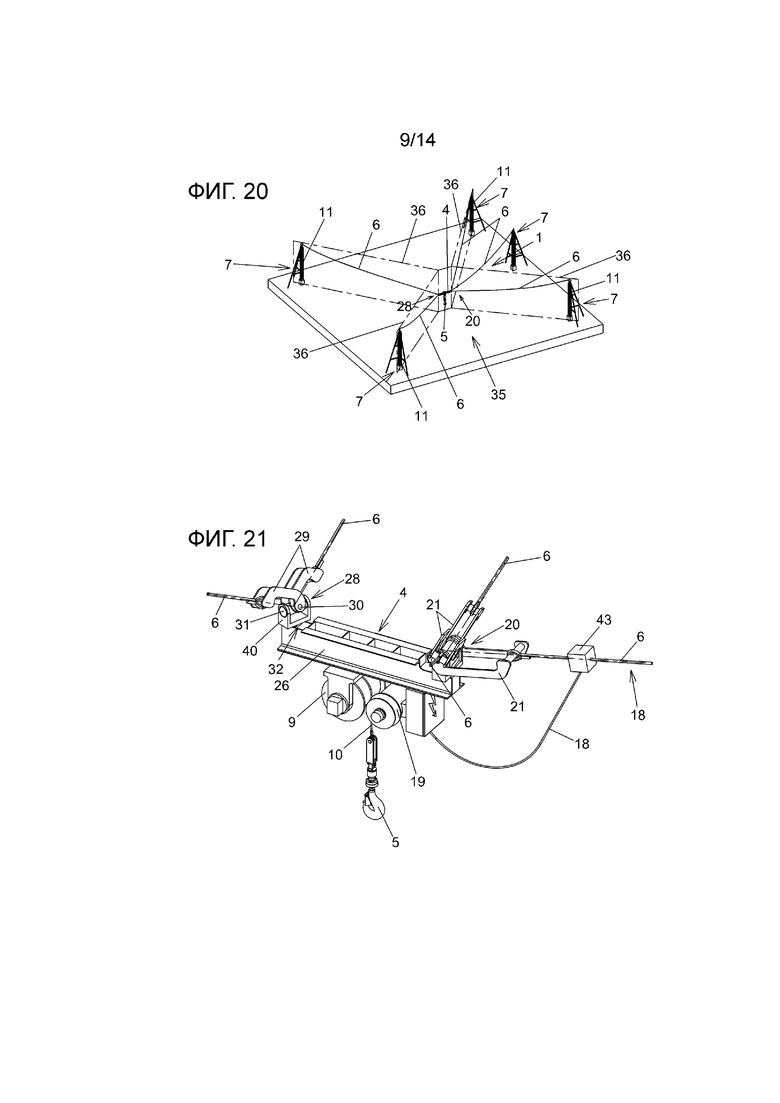
На фиг.20 и 21 показан следующий пример исполнения изобретения. Фиг.20 оказывает схематичное изображение всей установки 1 для перемещения грузов, фиг.21 - изображение в деталях используемого там вида носителя 4 груза. Первое отличие от показанных до настоящего момента вариантов исполнения заключается в том, что здесь в этом примере исполнения показано в качестве примера, что на носителе 4 груза канаты 6 позиционирования могут быть закреплены также и более чем одним множественным канатным подвесом 28. В примере исполнения согласно фиг.20 и 21 носитель 4 груза имеет следующий множественный канатный подвес 28, которым, по меньшей мере, два других из канатов 6 позиционирования соединены с носителем 4 груза. Множественный канатный подвес 20 и следующий множественный канатный подвес 28 расположены на расстоянии друг от друга, предпочтительно расположены на противоположных друг другу концах несущей траверсы 26. Множественный канатный подвес 20, в котором совместно проведены три каната 6 позиционирования, выполнен как в примере исполнения согласно фиг.9-12. Расположенный на другом конце несущей траверсы 26 следующий множественный канатный подвес 28 направляет два каната 6 позиционирования вместе на носитель 4 груза. Технология этого следующего множественного канатного подвеса 28, однако, в остальном, та же самая, что и у множественного канатного подвеса 20 для трех канатов 6 позиционирования. Также и здесь для реализации осей 22, 23 и 24 поворота реализована конструкция с первым осевым болтом 30, со вторым осевым болтом 31 и вилкой 40, а также с расположенным на ней третьим осевым болтом 32. Следующие канатные соединители 29 по своей конструкции также соответствуют канатным соединителям 21. Также и здесь, таким образом, предусмотрено, чтобы каждый из следующих канатных соединителей 29 был расположен с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей поворота на следующем множественном канатном подвесе 28, и все оси поворота следующего канатного соединителя 29 пересекались в общей точке пересечения этого следующего множественного канатного подвеса 28.
Следующее отличие от примеров исполнения до настоящего момента заключается в том, что в этом примере исполнения согласно фиг.20 и 21 лебедка 9 подъемного каната расположена не на одном из подвесных устройств 7, а прямо на носителе 4 груза. Кроме того, для вращения лебедки 9 подъемного каната на носителе 4 груза, соответственно, на несущей траверсе 26 расположен приводной мотор 19, который запитывается электрической энергией через провод 18 для энергоснабжения. Провод 18 для энергоснабжения для снабжения приводного мотора 19 лебедки 9 подъемного каната электрической энергией в этом примере исполнения частично встроен в один из канатов 6 позиционирования и частично проведен как отдельный провод 18 к лебедке 9 подъемного каната. Здесь в показанном примере исполнения конкретным является то, что провод 18 для энергоснабжения вплетен в один из канатов 6 позиционирования известным образом и так проведен к одному из подвесных устройств 7, и там к известной запитке током в лебедке 8 каната позиционирования. На развязке 43 провод 18 для энергоснабжения выведен из каната 6 позиционирования и затем как отдельный провод подводится к приводному мотору 19.
Разумеется, возможны и другие варианты исполнения. Так, н-р, провод 18 для энергоснабжения мог бы быть проведен к одному из подвесных устройств 7 полностью как отдельный провод. Тогда в любом случае было бы предпочтительным, если он был бы проведен в вертикальной плоскости 36 одного из канатов 6 позиционирования. В той же мере также возможно, чтобы встроенный в канат 6 позиционирования провод 18 для энергоснабжения был проведен через соответствующий канатный соединитель 21 и соответствующий множественный канатный подвес 20, соответственно, 28 или соответствующий одиночный канатный подвес 27 напрямую в носитель 4 груза.
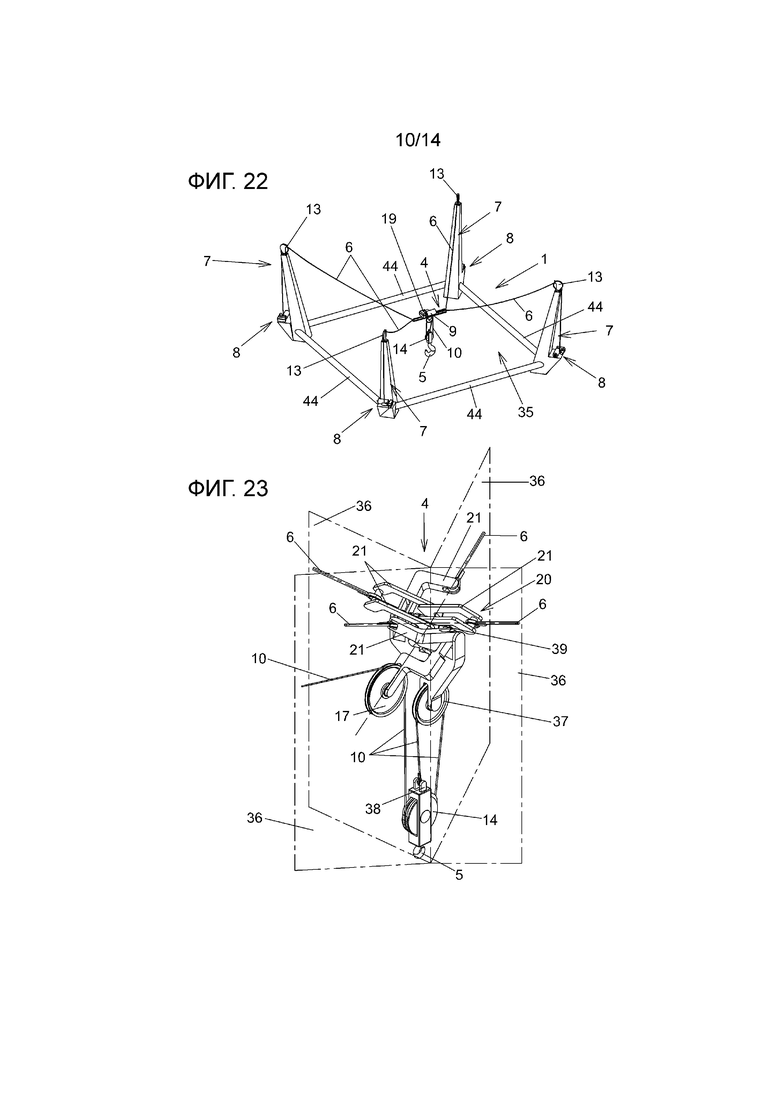
Фиг.22 показывает в качестве примера, что подвесные устройства 7 соответствующих изобретению установок 1 для перемещения грузов могут быть выполнены не только, как в поясненных до настоящего момента примерах исполнения, в виде прежде всего отдельных образований. В примере исполнения согласно фиг.22 подвесные устройства 7 жестко соединены друг с другом посредством соответствующих распорок 44, так что установка 1 для перемещения грузов в этой конфигурации может быть установлена на поверхности 35 местности и также перемещена от нее к другому месту. Такие варианты исполнения установок 1 для перемещения грузов, у которых подвесные устройства 7 жестко соединены друг с другом при помощи распорок 44, особенно хорошо реализуемы тогда, когда установка 1 для перемещения грузов не слишком большая. В любом случае, конструкция с распорками 44 имеет то преимущество, что установка 1 для перемещения грузов относительно беспроблемно и быстро может быть установлена на соответствующей поверхности 35 местности, таким образом, при определенных обстоятельствах, закрепление (анкерное крепление) подвесного устройства 7 либо может быть выполнено относительно просто, либо от него можно будет вовсе отказаться.
Также в этом примере исполнения согласно фиг.22 лебедка 9 подъемного каната расположена непосредственно на носителе 4 груза, поэтому подводка подъемного каната 10 от одного из подвесных устройств 7 к носителю 4 груза может стать ненужной. Подводка провода 18 для энергоснабжения для приводного мотора 19 лебедки 9 подъемного каната может производиться как поясняется с помощью фиг.21 или иным пригодным образом. Разумеется, подъемный канат 10 мог бы быть проведен иначе, чем изображено на фиг.22, также к одному из подвесных устройств 7.
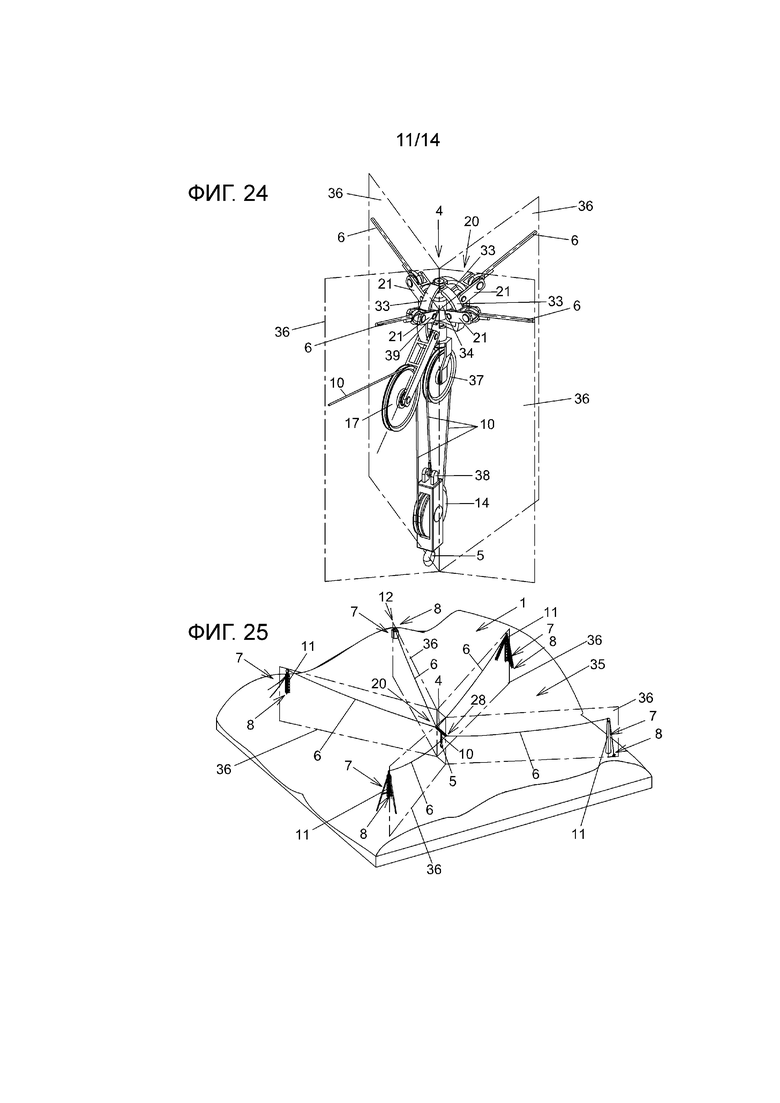
Фиг.23 и 24 показывают носитель 4 груза для соответствующих изобретению установок 1 для перемещения грузов, у которых все канаты 6 позиционирования установки 1 для перемещения грузов соединены при помощи одного единственного множественного канатного подвеса 20 через канатный соединитель 21 с носителем 4 груза. Также и у этих примеров исполнения предусмотрено, чтобы каждый канатный соединитель 21 был установлен на множественном канатном подвесе 20 с возможностью поворота вокруг, по меньшей мере, двух ориентированных перпендикулярно друг другу осей 22, 23, 24 поворота, и все оси 22, 23, 24 поворота канатных соединителей 21 пересекались в общей точке 25 пересечения этого множественного канатного подвеса 20. При этом на фиг.23 используется та же самая технология в соответственно адаптированном виде, как она более подробно была пояснена с помощью фиг.11 и 12. Фиг.24 показывает форму усовершенствования технологии с имеющими форму участка дуги окружности направляющими 33 для канатных соединителей 21, которая может быть выполнена по аналогии с примерами согласно фиг.14 по 19.
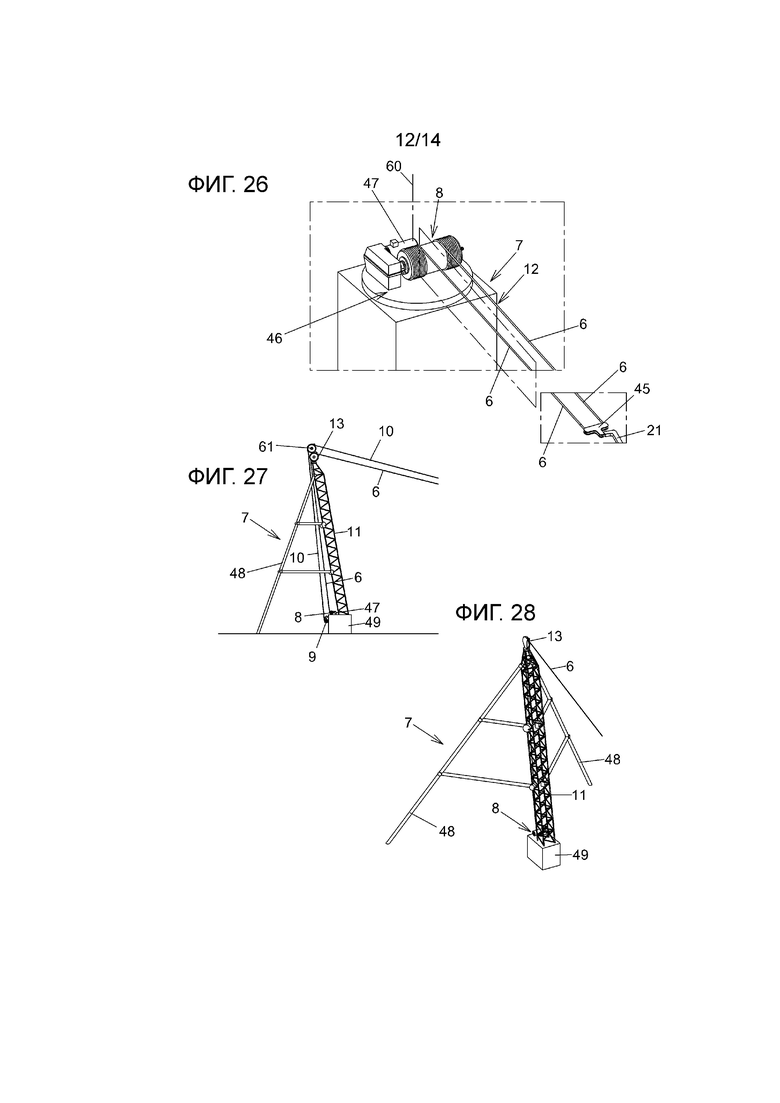
Фиг.25 показывает вариант исполнения установки 1 для перемещения грузов со всего пятью канатами 6 позиционирования, которая установлена над поверхностью 35 местности с относительно неспокойной топографией. Здесь в этом примере находят применение различные виды подвесных устройств 7. При этом четыре из пяти подвесных устройств 7 имеют мачты 11. Одно из подвесных устройств 7 выполнено в форме башни 12. Выполненное как башня 12 подвесное устройство 7 и расположенная там лебедка 8 каната позиционирования изображены на фиг.26 более подробно. На фиг.26 хорошо видно, что лебедка 8 каната позиционирования у этого варианта находится сверху на выполненном как башня 12 подвесном устройстве 7. Лебедка 8 каната позиционирования имеет привод от расположенного также на этой башне 12 приводного мотора 47. Лебедка 8 каната позиционирования и приводной мотор 47 в этом примере исполнения находятся на поворотной тарелке 46. Таким образом, речь идет о первом примере исполнения, при котором лебедка 8 каната позиционирования расположена с возможностью поворота на соответствующем подвесном устройстве 7. В примере исполнения согласно фиг.26 происходит поворот вокруг вертикальной оси 60 поворота. Здесь речь идет предпочтительно о свободной поворачиваемости, при которой исключительно натяжение на канатах 6 позиционирования решает то, в каком направлении лебедка 8 каната позиционирования будет повернута. Разумеется, для поворота лебедки 8 каната позиционирования также может быть предусмотрен моторизованный привод, который здесь не показан.
Фиг.26 - это тоже пример, в котором от лебедки 8 каната позиционирования проложены не один канат 6 позиционирования, а два направленных параллельно друг другу каната 6 позиционирования к соответствующему канатному соединителю 21 и, тем самым, к носителю 4 груза. Как также изображено на фиг.26, оба каната 6 позиционирования на своем обращенном от лебедки 8 каната позиционирования конце соединены друг с другом при помощи поперечной распорки 45. С этой поперечной распоркой 45 сцеплен один из канатных соединителей 21, который может оканчиваться уже описанным способом в множественный канатный подвес 20 или 28. Разумеется, оба каната 6 позиционирования этого варианта исполнения могли бы быть подведены через поперечную распорку 45 также к одиночному канатному подвесу 27 соответствующего носителя 4 груза.
В любом случае следует указать еще на то, что фиг.26 показывает пример, в котором лебедка 8 каната позиционирования расположена прямо сверху на подвесном устройстве 7, соответственно, башне 12, поэтому отказываются от дополнительных направляющих канатных роликов 13 для каната или канатов 6 позиционирования. Различные, показанные с помощью фиг.26 варианты могут быть выполнены, разумеется, как отдельно, так и в комбинации с другими вариантами.
Фиг.27 и 28 показывают в качестве примера подвесное устройство 7, которое имеет, по меньшей мере, одну мачту 11, причем на мачте 11 расположен направляющий канатный ролик 13 для висящего на этом подвесном устройстве 7 каната 6 позиционирования. Направляющий канатный ролик 13 находится предпочтительно на верхушке мачты. Но он мог бы быть расположен еще ниже на мачте 13. В любом случае, канат 6 позиционирования проложен, идя от носителя 4 груза через направляющий канатный ролик 13 по направлению вниз к закрепленной еще ниже на подвесном устройстве 7 лебедке 8 каната позиционирования. На фиг.27 дополнительно в качестве примера изображен следующий направляющий канатный ролик 61, который закреплен на мачте 11 через направляющий канатный ролик 13. Через этот следующий направляющий канатный ролик 61 может быть при необходимости проведен подъемный канат 10 к закрепленной еще ниже на подвесном устройстве 7 лебедке 9 подъемного каната. На фиг.28 это не изображено.
На фиг.27 и 28 подвесное устройство 7 имеет в любом случае две растяжки 48, которые закреплены в соответствующем основании (грунте). Мачта 11, напротив, стоит цоколем 49 на основании. Это может быть достаточным, поскольку в этой форме исполнения через мачту 11 действуют на поверхность 35, соответственно, на основание, только силы давления (сжатия). Разумеется, цоколь 49 также может быть пригодным образом соединен с основанием. В случае цоколя 49 речь может идти также, н-р, о залитом бетонном фундаменте или тому подобном.
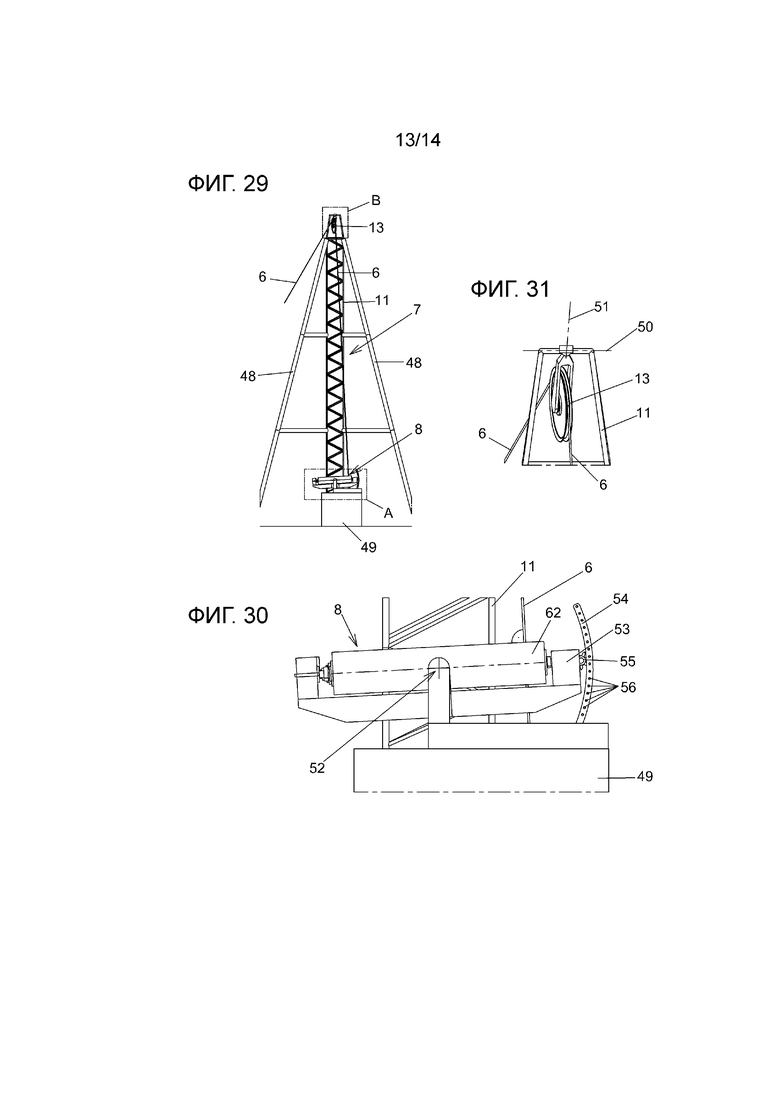
Чтобы удерживать износ канатов и канатных лебедок максимально малым, предпочтительно, если соответствующий канат «набегает» под прямым углом на канатную лебедку. Чтобы это обеспечить, в принципе, предпочтительно, если канатная лебедка расположена с возможностью поворота. Это расположение с возможностью поворота имеет особое преимущество тогда, когда, как показано с помощью примера исполнения на фиг.26, соответствующий канат идет напрямую без отклонения к носителю 4 груза. Другая группа вариантов исполнения, при которых поворотная установка соответствующей канатной лебедки является предпочтительной, - это тогда, когда соответствующий направляющий канатный ролик расположен относительно близко к канатной лебедке. На фиг.29 и 30 в качестве примера с помощью каната 6 позиционирования и соответствующей лебедки 8 каната позиционирования показано, как, н-р, может быть выполнено такое поворотное размещение канатной лебедки. Для лебедки 9 подъемного каната, как и для лебедки управляющего каната 16 это может быть выполнено аналогичным образом, без необходимости четко показывать это. Фиг.29 показывает в качестве примера, как лебедка 8 каната позиционирования расположена на цоколе 49 и, таким образом, на подвесном устройстве 7. Канат 6 позиционирования проходит от лебедки 8 каната позиционирования через расположенный на верхушке мачты 11 направляющий канатный ролик 13 к не изображенному здесь носителю 4 груза. Подвесное устройство 7 может быть выполнено, н-р, как показано на фиг.27 и 28.
Фиг.30 показывает немного увеличено область A из фиг.29 с лебедкой 8 каната позиционирования. Там хорошо видно, что лебедка 8 каната позиционирования расположена с возможностью поворота вокруг оси 52 поворота. Здесь речь идет о поворачиваемости с моторизованным приводом. Для этого вращаемый посредством мотора вокруг своей продольной оси барабан 62 лебедки 8 каната позиционирования, на который наматывается канат 6 позиционирования и с которой разматывается канат 6 позиционирования, соединен посредством повышающей передачи 53 с шестерней 55. Эта шестерня 55 зацепляется с пальцами 56 выполненной изогнутой подъемной рейки 54. Разумеется, вместо подъемной рейки 54 мог бы быть использован также изогнутый зубчатый стержень. Передача 53 обеспечивает, чтобы шестерня 55 обеспечивала адаптированным к скорости намотки и размотки образом оптимальный угол поворота, поэтому канат 6 позиционирования всегда находится под более или менее прямым углом к канатному барабану 62 и так на него «набегает» или с него сходит. Разумеется, такая имеющая моторизованный привод поворачиваемость лебедки 8 каната позиционирования, соответственно, канатной лебедки, в общем, может быть реализована иначе. Н-р, соответствующий приводной мотор мог бы быть установлен напрямую на ось 52 поворота. Также можно было бы для привода шестерни 55 вместо передачи 53 использовать отдельно управляемый мотор. Кроме того, разумеется, есть многочисленные другие возможности.
Фиг.31 показывает в качестве примера вершину мачты в области B из фиг.29. Здесь изображено, как направляющий канатный ролик 13 расположен с возможностью поворота вокруг обеих перпендикулярных осей 50 и 51 поворота на подвесном устройстве 7. Это также способствует тому, чтобы соответствующий канат, здесь канат 6 позиционирования, с максимально малым износом вести от соответствующей канатной лебедки, здесь лебедки 8 каната позиционирования, к носителю 4 груза. Разумеется, соответствующие конструкции также предпочтительны для соответствующих направляющих канатных роликов для подъемного каната 10 и/или управляющего каната 16 и, при определенных обстоятельствах, также для соответствующих проводов 18 для энергоснабжения.
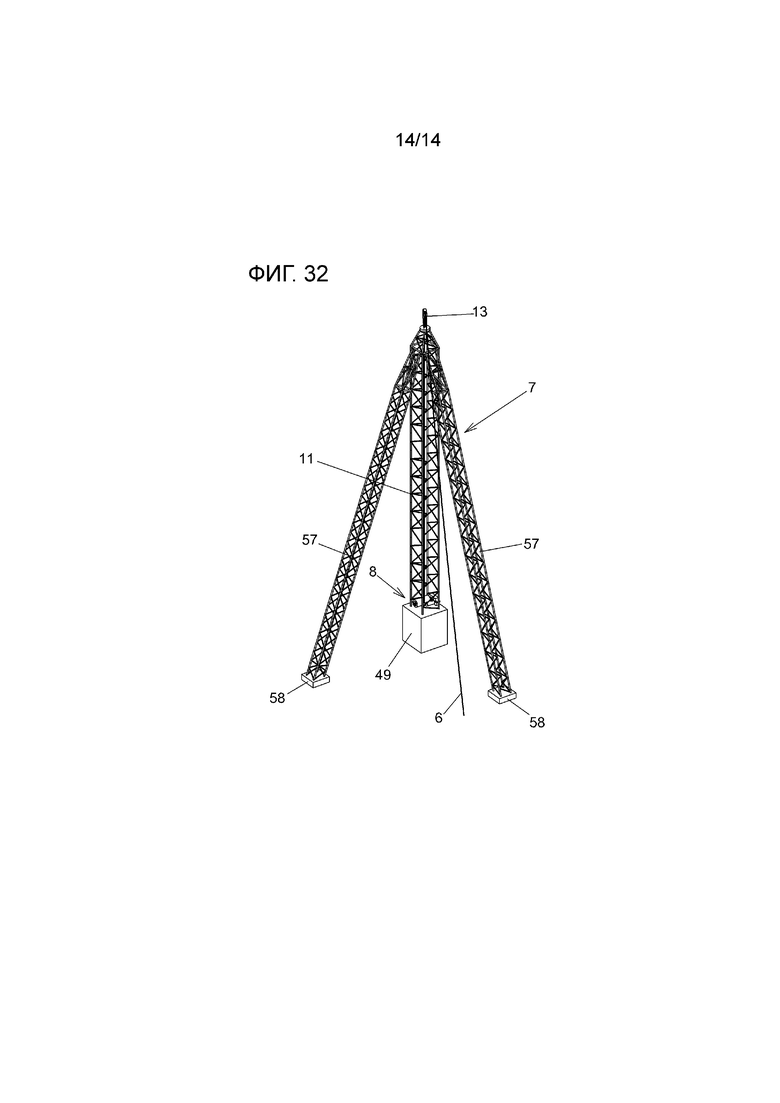
Принципиальным является то, что подвесные устройства 7 для их закрепления в основании, разумеется, могут быть жестко с ним связаны, н-р, соответствующими фундаментами или тому подобным. В частности, при таких установках 1 для перемещения грузов, которые требуются на одном месте только на определенный промежуток времени, также является предпочтительным предоставить решения, при которых подвесные устройства 7 вообще не должны иметь закрепления или иметь только незначительное закрепление в основании. Фиг.32 показывает следующий пример для этого. Это подвесное устройство 7 имеет две выполненные в форме решетчатых мачт опорные стойки 57, которые своими соответствующими цоколями 58 приложения давления должны быть свободно установлены на основании или должны быть незначительно закреплены только от соскальзывания. Задняя мачта 11 этого подвесного устройства 7 служит на фиг.32 чисто как растяжка 48. Чтобы иметь возможность воспринимать необходимые растягивающие силы, мачта 11 соединена с цоколем 49, вес которого настолько большой, чтобы его было достаточно для восприятия возникающих растягивающих сил без крепления в основании. В смысле лучшей транспортируемости в случае цоколя 49 речь также может о полом теле, которое на месте заполняется жидкостью, такой как, н-р, вода или другим материалом, н-р, сыпучим материалом для обеспечения необходимого веса. Разумеется, вместо этого также может использоваться соответствующий бетонный цоколь или тому подобное.
Список ссылочных позиций:
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОНЕСУЩИЙ СОЕДИНИТЕЛЬ | 2007 |
|
RU2452682C2 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| СИСТЕМА ТРАНСПОРТИРОВКИ ГРУЗА | 2022 |
|
RU2797077C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2018 |
|
RU2695940C1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ РОЛИКОВЫХ БАТАРЕЙ | 2014 |
|
RU2628838C2 |
| ТРАНСПОРТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1994 |
|
RU2146626C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ | 1994 |
|
RU2119055C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2174090C1 |
| Способ перемещения груза двумя кранами | 1981 |
|
SU998314A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ГРУЗА | 2022 |
|
RU2796696C1 |
Изобретение относится к кабельным кранам. Установка (1) для перемещения грузов имеет носитель (4) груза, и по меньшей мере одно закрепленное на носителе (4) груза устройство (5) захвата груза для приема груза (2), и по меньшей мере три каната (6) позиционирования, и по меньшей мере три подвесных устройства (7). Каждое подвесное устройство (7) имеет по меньшей мере одну лебедку (8) каната позиционирования (8) для наматывания и разматывания одного из канатов (6) позиционирования, и носитель (4) груза с помощью канатов (6) позиционирования висит на подвесных устройствах (7). Носитель (4) груза и закрепленное на нем устройство (5) захвата груза являются перемещаемыми путем приведения в действие лебедок (8) канатов позиционирования. Носитель (4) груза имеет по меньшей мере один множественный канатный подвес (20), которым по меньшей мере два из канатов (6) позиционирования соединены через канатный соединитель (21) с носителем (4) груза. Каждый из канатных соединителей (21) расположен на множественном канатном подвесе (20) с возможностью поворота вокруг по меньшей мере двух ориентированных перпендикулярно друг другу осей (22, 23, 24, 25) поворота, и все оси (22, 23, 24, 25) поворота канатных соединителей (21) пересекаются в одной общей точке (39) пересечения этого множественного канатного подвеса (20). Достигается улучшение установки для перемещения грузов для увеличения рабочего пространства между подвесными устройствами. 9 з.п. ф-лы, 32 ил.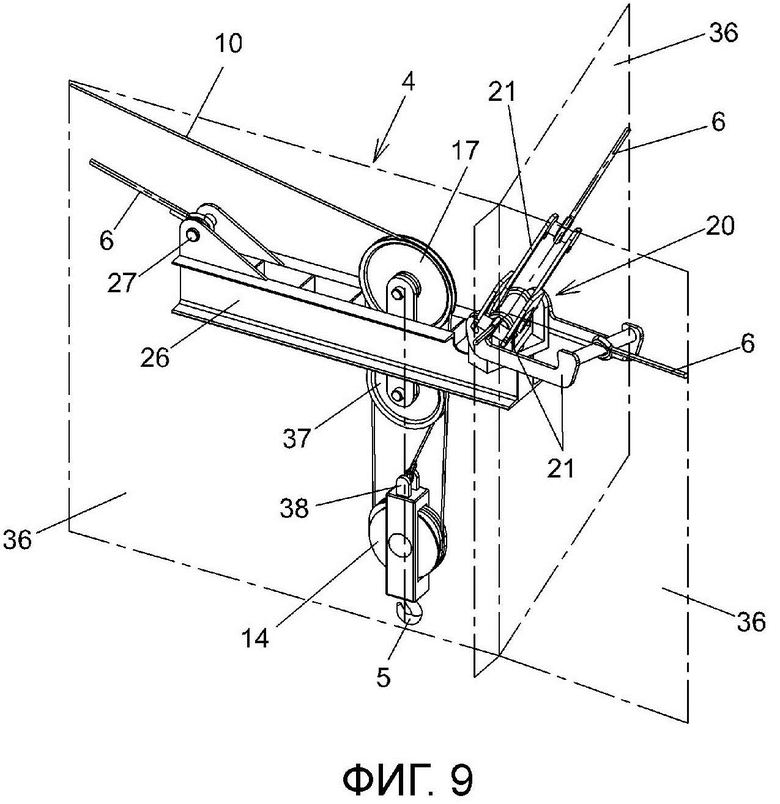
1. Установка (1) для перемещения грузов для перемещения груза (2) в рабочем пространстве (3), причем установка (1) для перемещения грузов имеет носитель (4) груза, и по меньшей мере одно закрепленное на носителе (4) груза устройство (5) захвата груза для приема груза (2), и по меньшей мере три каната (6) позиционирования, и по меньшей мере три расположенных на расстоянии друг от друга подвесных устройства (7), причем каждое подвесное устройство (7) имеет по меньшей мере одну лебедку (8) каната позиционирования для наматывания и разматывания одного из канатов (6) позиционирования, и носитель груза (4) с помощью канатов (6) позиционирования висит на подвесных устройствах (7), причем носитель (4) груза и закрепленное на нем устройство (5) захвата груза выполнены с возможностью перемещения в и/или над рабочим пространством (3) путем приведения в действие лебедок (8) канатов позиционирования, отличающаяся тем, что носитель (4) груза имеет по меньшей мере один множественный канатный подвес (20), с помощью которого по меньшей мере два из канатов (6) позиционирования через соответствующий канатный соединитель (21) соединены с носителем (4) груза, причем каждый из канатных соединителей (21) расположен на множественном канатном подвесе (20) с возможностью поворота вокруг по меньшей мере двух ориентированных перпендикулярно друг другу осей (22, 23, 24, 25) поворота, и все оси (22, 23, 24, 25) поворота канатных соединителей (21) пересекаются в одной общей точке пересечения (39) этого множественного канатного подвеса (20).
2. Установка (1) для перемещения грузов по п.1, отличающаяся тем, что все канаты (6) позиционирования соединены с помощью множественного канатного подвеса (20) через соответствующий канатный соединитель (21) с носителем (4) груза, причем каждый из канатных соединителей (21) расположен на множественном канатном подвесе (20) с возможностью поворота вокруг по меньшей мере двух ориентированных перпендикулярно друг другу осей (22, 23, 24, 25) поворота, и все оси (22, 23, 24, 25) поворота канатных соединителей (21) пересекаются в одной общей точке (39) пересечения этого множественного канатного подвеса (20).
3. Установка (1) для перемещения грузов по п.1, отличающаяся тем, что носитель (4) груза имеет продолговато протяженную несущую траверсу (26), а множественный канатный подвес (20) расположен на этой несущей траверсе (26), предпочтительно на конце несущей траверсы (26).
4. Установка (1) для перемещения грузов по п.3, отличающаяся тем, что носитель (4) груза имеет одиночный канатный подвес (27), с помощью которого одиночный другой из канатов (6) позиционирования соединен с носителем (4) груза, причем упомянутый одиночный канатный подвес (27) расположен на несущей траверсе (26), предпочтительно на противоположном множественному канатному подвесу (20) конце несущей траверсы (26), на расстоянии от множественного канатного подвеса (20).
5. Установка (1) для перемещения грузов по п.3, отличающаяся тем, что носитель (4) груза имеет по меньшей мере один следующий множественный канатный подвес (28), с помощью которого по меньшей мере два других из канатов (6) позиционирования соединены с носителем (4) груза, причем множественные канатные подвесы (20) расположены на несущей траверсе (26) на расстоянии друг от друга, предпочтительно на противоположных друг другу концах несущей траверсы (26).
6. Установка (1) для перемещения грузов по п.5, отличающаяся тем, что упомянутые по меньшей мере два других из канатов (6) позиционирования через соответствующий следующий канатный соединитель (29) соединены при помощи следующего множественного канатного подвеса (28) с носителем (4) груза, причем каждый из упомянутых следующих канатных соединителей (29) расположен с возможностью поворота вокруг по меньшей мере двух ориентированных перпендикулярно друг другу осей поворота на упомянутом следующем множественном канатном подвесе (28), и все оси поворота следующего канатного соединителя (29) пересекаются в одной общей точке пересечения этого следующего множественного канатного подвеса (28).
7. Установка (1) для перемещения грузов по одному из пп.1-6, отличающаяся тем, что канатные соединители (21) выполнены каждый как продолговато протяженные и/или жесткие сами по себе тела, и/или что предусмотрено, что на первом конце соответствующего канатного соединителя (21) закреплен соответствующий канат (6) позиционирования, и канатный соединитель (21) вторым противоположным первому концу концом расположен на множественном канатном подвесе (20) с возможностью поворота.
8. Установка (1) для перемещения грузов по одному из пп.1-7, отличающаяся тем, что по меньшей мере два из канатных соединителей (21) с помощью по меньшей мере двух перпендикулярных друг другу осевых болтов (30, 31, 32) расположены с возможностью поворота вокруг упомянутых по меньшей мере двух ориентированных перпендикулярно друг другу осей (22, 23, 24, 25) поворота на множественном канатном подвесе (20), причем предпочтительно предусмотрено, что соответствующий канатный соединитель (21) расположен на первом из осевых болтов (30) с возможностью поворота вокруг первой из осей (22) поворота, и первый из осевых болтов (30) со вторым из осевых болтов (31) расположен с возможностью поворота вокруг второй из осей (23) поворота.
9. Установка (1) для перемещения грузов по одному из пп.1-7, отличающаяся тем, что множественный канатный подвес (20) для каждого из расположенных на нем с возможностью поворота канатных соединителей (21) имеет имеющую форму участка дуги окружности направляющую (33), по которой соответствующий канатный соединитель (21) направлен для поворота вокруг первой из перпендикулярных осей (22) поворота, и имеющие форму участка дуги окружности направляющие (33) для поворота соответствующих канатных соединителей (21) вокруг второй из ориентированных перпендикулярно друг другу осей (23) поворота являются поворотными вокруг одного общего осевого болта (34).
10. Установка (1) для перемещения грузов по одному из пп.1-9, отличающаяся тем, что установка (1) для перемещения грузов имеет лебедку (9) подъемного каната и подъемный канат (10), причем подъемный канат (10) является наматываемым и разматываемым лебедкой (9) подъемного каната, и устройство (5) захвата груза с помощью подъемного каната (10) висит на носителе (4) груза и является поднимаемым и опускаемым относительно носителя (4) груза.
| WO 2020198862 A1, 08.10.2020 | |||
| CN 103117075 A, 06.07.2011 | |||
| СПОСОБ ВЕДЕНИЯ СЕМЕНОВОДСТВА МНОГОПЛОДНЫХ СОРТОВ ОВОЩНЫХ И БАХЧЕВЫХ КУЛЬТУР | 2014 |
|
RU2575354C1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |

