Изобретение относится к области определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя, работающего под нагрузкой, и может быть использовано при испытаниях и эксплуатации частотно-регулируемых асинхронных двигателей.
Для эффективного управления частотно-регулируемым асинхронным двигателем требуется оперативное определение изменяющейся в процессе работы взаимной индуктивности цепи намагничивания, необходимой для коррекции угловой частоты скольжения ротора и регулирования величины вращающего момента.
Прямое измерение взаимной индуктивности цепи намагничивания на работающем в различных режимах асинхронном двигателе невозможно, а косвенные методы ее определения недостаточно эффективны.
Известны методы косвенного определения взаимной индуктивности цепи намагничивания работающего частотно-регулируемого асинхронного двигателя в составе методов идентификации электромагнитной постоянной времени короткозамкнутого ротора путем отождествления параметров по каналу регулирования частоты вращения (Zai. L.C., Demarco C.L., Lipo T.A. Anaxtendid Kahman filter approach to motor Application, 1992. Vol.28, №1. p.96-104).
К принципиальным недостаткам указанных известных методов относится то, что в них производится непрямое измерение взаимной индуктивности цепи намагничивания асинхронного двигателя, а косвенное - через электромагнитную постоянную времени ротора путем идентификации параметров, включающем внешний контур регулирования напряжения, и каналу регулирования частоты вращения, включающем внешний контур регулирования вектора потокосцепления ротора, что неизбежно приводит к ошибкам в управлении асинхронным двигателем.
Наиболее близким техническим решением того же назначения по совокупности существенных признаков является способ определения взаимной индуктивности цепи намагничивания асинхронного двигателя, описанный в способе управления асинхронным двигателем с короткозамкнутым ротором, где используется концепция адаптивного управления с эталонной моделью, в которой рассматривают уравнения схемы замещения асинхронного двигателя, содержащие общее сопротивление намагничивающей цепи, причем в качестве вектора переменных состояний приняты компоненты намагничивающего тока ротора, а в качестве входа - токи статора, а математическая модель двигателя - в виде уравнений токов и момента (Ч.Аттаианесе, А.Дамиано, И.Марониу, А.Перфетто. Управление асинхронным двигателем с адаптацией к изменяющейся электромагнитной постоянной времени ротора // Электротехника, 1996, №7, с.29-31). При этом в вычислительное устройство вводят частоты вращения ротора и магнитного поля статора, фазное напряжение и фазный ток статора, фазовый угол между векторами тока и напряжения одной и той же фазы обмотки статора, активные сопротивления фаз обмоток статора и ротора и индуктивности рассеяния фаз обмоток статора и ротора.
К недостаткам описанного способа относится то, что в известном способе реализации управления асинхронным двигателем используется адаптация к изменяющейся электромагнитной постоянной времени ротора, в которую входит взаимная индуктивность намагничивающей цепи, а не ее прямое определение, что также не может обеспечить безошибочное управление частотно-регулируемым асинхронным двигателем из-за сложности математического аппарата и трудности обеспечения адекватности математической модели, требующей высокого быстродействия средств моделирования.
Задачей предлагаемого способа является оперативное определение взаимной индуктивности цепи намагничивания вращающегося асинхронного двигателя во всех режимах его работы при изменениях насыщения магнитной цепи с целью получения необходимых данных для коррекции угловой частоты скольжения ротора и задания требуемой величины вращающего момента.
Поставленная задача решается тем, что в известном способе определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя, при котором в вычислительное устройство вводят частоты вращения ротора и магнитного поля статора, фазное напряжение и фазный ток статора, фазовый угол между векторами тока и напряжения одной и той же фазы обмотки статора, активного сопротивления фаз обмоток статора и ротора и индуктивности рассеяния фаз обмоток статора и ротора, введены отличия, заключающиеся в том, что в вычислительное устройство дополнительно вводят кривую намагничивания магнитной цепи, вычисленную расчетным или снятую опытным путем в зависимости от тока намагничивания, по которой определяют в вычислительном устройстве взаимную индуктивность цепи намагничивания по текущим значениям тока намагничивания Lm=f(Im), модуль текущего значения которого вычисляют по математической формуле:

где I1 - фазный ток статора; R1 - активное сопротивление фазы обмотки статора; R2 - активное сопротивление фазы обмотки ротора; φ - фазовый угол между векторами тока и напряжения одной и той же фазы обмотки статора; ψ2 - угол между векторами эдс и тока обмотки ротора, определяемый по формуле:

где L2 - индуктивность рассеяния обмотки ротора; ωск - абсолютная частота скольжения ротора (частота тока ротора):

где ω1 - частота вращения магнитного поля статора; ω2 - частота вращения ротора; s - относительное скольжение ротора:
 - модуль полного сопротивления фазы статора:
- модуль полного сопротивления фазы статора:
где U1 - напряжение фазы обмотки статора; угол γ определяется из соотношения:

где L1 и L2 - индуктивности рассеяния фаз обмоток соответственно статора и ротора; R0 и L0 - полное активное сопротивление и полная индуктивность фазы обмотки статора.
Представленная математическая формула (1) для непосредственного оперативного определения взаимной индуктивности цепи намагничивания Lm частотно-регулируемого асинхронного двигателя получена следующим образом.
Представим уравнения Т-образной схемы замещения так, чтобы в них не входила составляющая цепи намагничивания с нелинейным элементом Lm (далее - все величины с индексом 2 приведены к обмотке статора):

где I2 - ток обмотки ротора; Z1 - полное сопротивление фазы обмотки статора:

Z2 - полное сопротивление фазы обмотки ротора:

где R2 - активное сопротивление фазы обмотки ротора, определяемое по формуле: 
Ток намагничивания Im определяем из выражений (7) и (8):

где Z0 - полное сопротивление фазы обмотки статора работающего двигателя:

Представим уравнение (12) в виде:

После подстановок в (14) значений Z1, Z2, Z0 получим вектор намагничивающего тока:

или модуль намагничивающего тока

Таким образом, взаимную индуктивность цепи намагничивания частотно-регулируемого асинхронного двигателя определяют в любом режиме его работы по текущим значениям тока намагничивания Im, определяемым по частотам вращения магнитного поля статора ω1 и ротора ω2, фазному напряжению U1 и фазному току I1 статора, фазовому углу φ между векторами тока и напряжения одной и той же фазы обмотки статора, величинам активного сопротивления фаз обмоток статора R1 и ротора R2 и индуктивностей рассеяния фаз обмоток статора L1 и ротора L2.
Технический результат состоит в том, что определение взаимной индуктивности производят оперативно.
Предложенная математическая зависимость для оперативного определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя позволяет эффективно использовать математическую модель для безошибочного управления вращающим моментом и тем самым обеспечить необходимые (заданные) режимы работы машин, механизмов, оборудования, графиков и безопасности движения электроподвижного состава и т.п. без непредусмотренных сбоев и остановок, а также повысить безопасность для обслуживающего персонала.
Данный способ реализуется с помощью блок-схемы, представленной на чертеже.
К обмотке статора 1 асинхронного двигателя подключены: инвертор 2, подающий питание от силового трансформатора; датчики: фазного тока 3, фазного напряжения 4, фазового угла между векторами тока и напряжения одной и той же фазы обмотки статора 5 через датчики 3 и 4, частоты вращения магнитного поля статора 6 и температуры обмотки статора 7. К ротору подсоединен датчик частоты вращения 8. К вычислительному устройству 9 подключены датчики: фазового угла между векторами тока и напряжения 5, частоты вращения магнитного поля статора 6, температуры обмотки статора 7 и частоты вращения ротора 8. Вычислительное устройство 9 конструктивно выполнено заодно с блоком системы управления 10, к которому подсоединен задатчик режимов работы 11.
Способ оперативного определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя осуществляют следующим образом: в вычислительное устройство 9 вводят конструктивные параметры асинхронного двигателя: кривую намагничивания в зависимости от тока намагничивания; расчетные величины активного сопротивления фазы обмотки статора R1, индуктивности рассеяния фаз обмоток статора L1 и ротора L2, затем в это же вычислительное устройство подают информацию: от датчика 3 о силе фазного тока L1; от датчика 4 о величине фазного напряжения U1; от датчика 5 о величине фазового угла φ между векторами тока I1 и напряжения U1; от датчика 6 о частоте вращения магнитного поля статора ω1; от датчика 7 о температуре обмотки статора и от датчика 8 о частоте вращения ротора ω2. Затем вычислительное устройство 9 определяет активное сопротивление фазы короткозамкнутой обмотки ротора R2 по математической формуле (11), взаимную индуктивность цепи намагничивания определяют по кривой намагничивания в зависимости от тока намагничивания, модуль текущего значения которого вычисляют по математической формуле (I):
 ,
,
где I1 - фазный ток статора; R1 - активное сопротивление фазы обмотки статора;
R2 - активное сопротивление фазы обмотки ротора; φ - фазовый угол между векторами тока I1 и напряжения U1 одной и той же фазы обмотки статора;
ψ2 - угол между векторами эдс ротора Е2 и током ротора I2, определяемый по формуле:  ,
,
где L2 - индуктивность рассеяния фазы обмотки ротора; ωск - абсолютная частота скольжения ротора (частота тока ротора):
 ,
,
где ω1 - частота вращения магнитного поля статора; ω2 - частота вращения ротора; s - относительное скольжение ротора:  ;
;
 - модуль полного сопротивления фазы обмотки статора:
- модуль полного сопротивления фазы обмотки статора:
 , где U1 - напряжение фазы обмотки статора; I1 - ток фазы обмотки статора; угол γ определяется из соотношения:
, где U1 - напряжение фазы обмотки статора; I1 - ток фазы обмотки статора; угол γ определяется из соотношения:
 ,
,
где L1 и L2 - индуктивности рассеяния фаз обмоток соответственно статора и ротора; R0 и L0 - полное активное сопротивление и полная индуктивность фазы обмотки статора.
Положительный эффект состоит в том, что определение взаимной индуктивности производят оперативно во всех режимах его работы при изменениях насыщения магнитной цепи, значения которой необходимы для коррекции угловой частоты скольжения ротора и задания требуемой величины вращающего момента, что позволяет безошибочно управлять частотно-регулируемым асинхронным двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374752C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ОБМОТКИ КОРОТКОЗАМКНУТОГО РОТОРА ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2386114C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2775819C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
Изобретение относится к области определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя. В вычислительное устройство вводят значения частот вращения ротора и магнитного поля статора, фазное напряжение и фазный ток статора, фазовый угол между векторами тока и напряжения одной и той же фазы обмотки статора, активное сопротивление фаз обмоток статора и ротора и кривую намагничивания магнитной цепи, по которой в вычислительном устройстве определяют значение взаимной индуктивности по текущему значению тока намагничивания, модуль которого определяется в том же вычислительном устройстве по математической формуле  где I1 - ток статора; R1 - сопротивление обмотки статора; R2 - сопротивление обмотки ротора; φ - угол между I1 и U1 одной и той же фазы обмотки статора; ψ2 - угол между векторами эдс и тока обмотки ротора; |Z0| - модуль полного сопротивления фазы обмотки статора. Технический результат заключается в возможности безошибочного управления частотно-регулируемым асинхронным двигателем во всех режимах его работы при изменениях насыщения магнитной цепи. 1 ил.
где I1 - ток статора; R1 - сопротивление обмотки статора; R2 - сопротивление обмотки ротора; φ - угол между I1 и U1 одной и той же фазы обмотки статора; ψ2 - угол между векторами эдс и тока обмотки ротора; |Z0| - модуль полного сопротивления фазы обмотки статора. Технический результат заключается в возможности безошибочного управления частотно-регулируемым асинхронным двигателем во всех режимах его работы при изменениях насыщения магнитной цепи. 1 ил.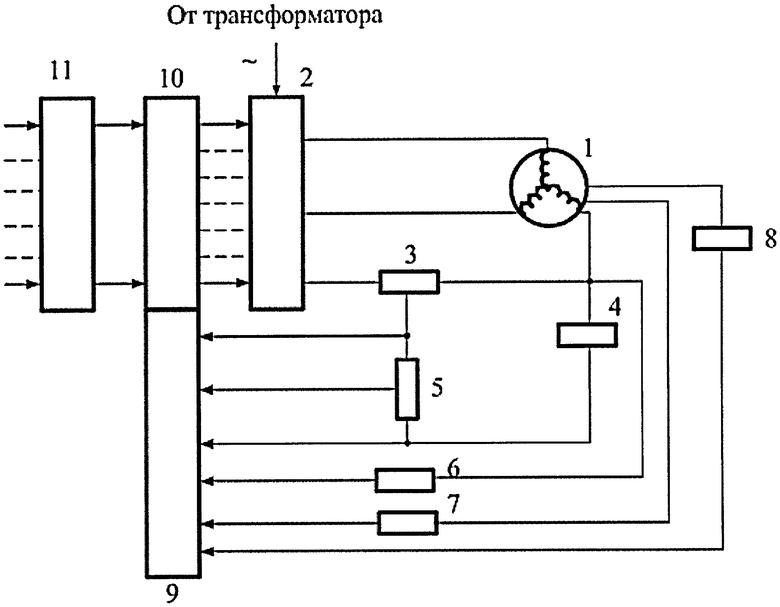
Способ определения взаимной индуктивности цепи намагничивания частотно-регулируемого асинхронного двигателя, при котором в вычислительное устройство вводят частоты вращения ротора и магнитного поля статора, фазное напряжение и фазный ток статора, фазовый угол между векторами тока и напряжения одной и той же фазы обмотки статора, активные сопротивления фаз обмоток статора и ротора, отличающийся тем, что в вычислительное устройство дополнительно вводят кривую намагничивания магнитной цепи, по которой определяют в вычислительном устройстве взаимную индуктивность цепи намагничивания Lm=f(Im), модуль текущего значения тока намагничивания определяют по математической формуле:
 ,
,
где I1 - фазный ток статора;
R1 - активное сопротивление фазы обмотки статора;
R2 - активное сопротивление фазы обмотки ротора;
φ - фазовый угол между векторами тока I1 и напряжения U1 одной и той же фазы обмотки статора;
ψ2 - угол между векторами э.д.с. и тока обмотки ротора, определяемый по формуле:  ,
,
где L2 - индуктивность рассеяния фазы обмотки ротора;
ωск - абсолютная частота скольжения ротора (частота тока ротора); ωск=ω1-ω2,
где ω1 - частота вращения магнитного поля статора;
ω2 - частота вращения ротора;
s - относительное скольжение ротора:  ;
;
|Z0| - модуль полного сопротивления фазы обмотки статора:  ,
,
где U1 - напряжение фазы обмотки статора;
I1 - ток фазы обмотки статора;
угол γ определяется из соотношения:  ,
,
где L1 и L2 - индуктивности рассеяния фаз обмоток соответственно статора и ротора;
R0 и L0 - полное активное сопротивление и полная индуктивность фазы обмотки статора.
| Аттаианесе Ч., Дамиано А., Марониу И., Перфетто А | |||
| Управление асинхронным двигателем с адаптацией к изменяющейся электромагнитной постоянной времени ротора | |||
| - Электротехника, 1996, №7, с.29-31 | |||
| Устройство для корреляционного приема дискретной информации | 1977 |
|
SU661839A1 |
| US 3528960 А, 07.11.1950 | |||
| Многоканатная подъемная установка | 1979 |
|
SU962170A1 |

