Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для регулирования момента и скорости асинхронных двигателей с минимизацией потерь электроэнергии при питании асинхронного электродвигателя от преобразователя частоты.
Известен электропривод переменного тока, содержащий адаптивный регулятор момента, который формирует вектор потокосцепления ротора путем формирования задания его мгновенных значений, амплитуда и частота которых зависит от задания на момент. Путем изменения частоты достигается формирование оптимального, с точки зрения минимизации потребления тока статора, угла между векторами тока статора и потокосцепления ротора, равного 45°. Поддержание потокосцепления ротора осуществляется путем введения фазных регуляторов, выходы которых подключены к управляющим входам ШИМ-регулятора тока. Инвертором формируются фазные токи статора с частотой и амплитудой, необходимой для формирования заданного значения момента при условии минимизации потребления тока статора из сети и наиболее полного использования магнитопровода [1].
Недостатками данного устройства являются сложность системы регулирования координат векторов тока статора и потока ротора из-за наличия множества математических операций, связанных с необходимостью коррекции параметров фазных регуляторов тока и фазных блоков, осуществляющих расчет потокосцепления ротора, при изменении скольжения двигателя, что приводит к снижению быстродействия системы, а также невысокая точность регулирования момента двигателя из-за отсутствия контроля и управления взаимным положением регулируемых векторов переменных двигателя.
Наиболее близким к изобретению по технической сущности и достигаемому результату является электропривод переменного тока, содержащий трехфазный инвертор, силовые выходы которого через датчики тока (а один напрямую) подключены к двум статорным обмоткам асинхронного двигателя, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, датчик скорости, установленный на валу двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход подключен к входу ПИ-регулятора скорости, выход которого соединен с входом блока задания модуля регулируемого параметра, выход которого подключен к первому входу блока формирования задания регулируемого параметра, имеющего три фазных выхода, соединенных с блоками сравнения, отрицательные входы которых соединены с блоками расчета регулируемого параметра, а выходы блоков сравнения соединены с входами регуляторов, выходы которых поступают на входы блока ШИМ-регулятора тока, выходы которого соединены с управляющими входами инвертора. Входы двух датчиков тока соединены с входом сумматора токов, а также соединены с входами блока ШИМ-регулятора тока, а также соединены с входами фазных блоков расчета регулируемого параметра, выход сумматора токов соединен с входом блока расчета регулируемого параметра и входом ШИМ-регулятора тока, первый вход блока расчета скольжения соединен с входом блока формирования частоты вращения потока, выход датчика скорости подключен ко второму входу блока расчета скольжения, выход которого соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с блоками регуляторов регулируемого параметра и блоками расчета регулируемого параметра, выход блока сравнения подключен к блоку компаратора, выход которого соединен со вторым входом блока задания модуля регулируемого параметра, выход регулятора скорости также подключен к одному входу блока коррекции, выход которого соединен с третьим входом блока задания тока намагничивания, блок расчета угла между векторами токов статора и намагничивания соединен с блоком коррекции модуля тока намагничивания, который корректирует задание на амплитуду тока намагничивания [2].
Недостатками данного устройства являются сложность управления координатами векторов тока статора и тока намагничивания, необходимость выполнения множества математических операций при коррекции, в функции скольжения, постоянных времени в шести блоках - регуляторах тока намагничивания и блоках расчета тока намагничивания, и корректируется только одна из двух постоянных времени этих блоков, что приводит к снижению точности и быстродействия электропривода.
Целью изобретения является упрощение системы управления, повышение точности поддержания момента двигателя и быстродействия электропривода за счет построения системы коррекции, осуществляющей управление более просто определяемым углом между векторами тока статора и потокосцепления ротора, уменьшение количества и упрощения конструкции адаптивных блоков с изменяемой в функции скольжения постоянной времени, осуществляющих вычисление мгновенных значений потокосцеплений ротора.
Предлагаемый электропривод переменного тока содержит трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, датчик скорости, установленный на валу асинхронного двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен к входу пропорционально-интегрального регулятора скорости, выходы двух датчиков фазного тока соединены с входами сумматора фазных токов, а также соединены с двумя входами первой группы фазных входов блока ШИМ-регулятора тока, а также соединены с двумя входами первой группы фазных входов блока вычисления угла между вектором тока статора и параметра намагничивания, выход сумматора фазных токов соединен с третьим входом первой группы фазных входов ШИМ-регулятора тока и с третьим входом первой группы фазных входов блока вычисления угла между вектором тока статора и параметра намагничивания, выход блока расчета угла между векторами тока статора и параметра намагничивания соединен с отрицательным входом блока сравнения угла между векторами тока статора и параметра намагничивания, выход блока расчета угла между векторами тока статора и блока сравнения угла между векторами тока статора и потокосцепления ротора соединен с отрицательным входом блока сравнения угла между векторами тока статора и потокосцепления ротора, положительный вход которого соединен с блоком задания этого угла, выход датчика скорости также соединен с одним входом формирователя частоты вращения магнитного потока и с первым входом блока расчета скольжения, второй вход которого соединен с выходом блока формирования частоты вращения магнитного потока, второй вход которого соединен с выходом блока задания разности частот вращения поля статора и ротора двигателя, выход формирователя частоты вращения магнитного потока соединен с одним входом блока ограничения частоты вращения магнитного потока, выход блока расчета скольжения соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с первыми входами трех фазных блоков расчета параметра намагничивания, выход регулятора скорости подключен к входу блока ограничения, выход которого подключен к первому входу сумматора сигналов задания момента, ко второму входу которого подключен выход блока коррекции задания момента двигателя, вход которого подключен к выходу блока сравнения величин заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, выход сумматора сигналов задания момента подключен к входу формирователя задания модуля тока статора, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора, три фазных выхода которого соединены с тремя фазными входами второй группы входов инвертора, три фазных выхода блока задания мгновенных значений тока статора также соединены со вторыми входами трех фазных блоков расчета потокосцепления ротора, выходы которых соединены с тремя фазными входами второй группы входов блока вычисления угла между векторами тока статора и потокосцепления ротора, выход блока задания скорости соединен с одним входом сумматора сигналов скорости, со вторым входом которого соединен выход блока задания разности частот вращения поля статора и ротора двигателя, выход сумматора сигналов скорости соединен с другим входом блока ограничения частоты вращения магнитного потока, выход которого соединен с входом пропорционального блока, выход которого соединен с частотным входом блока задания мгновенных значений тока статора.
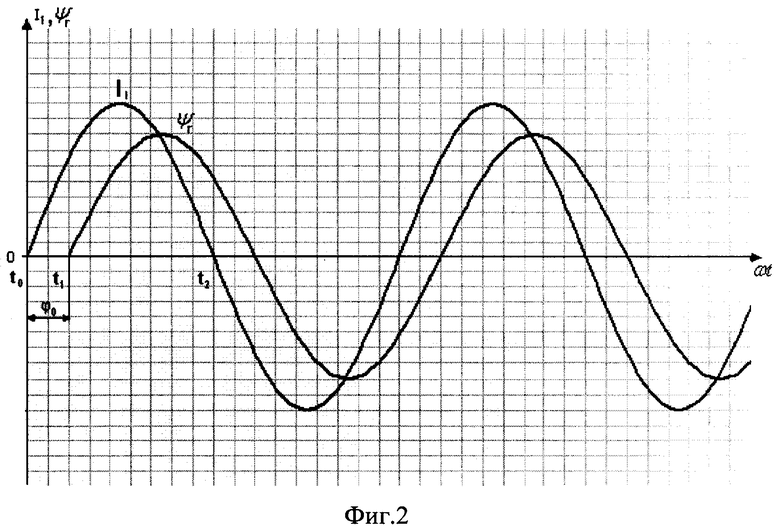
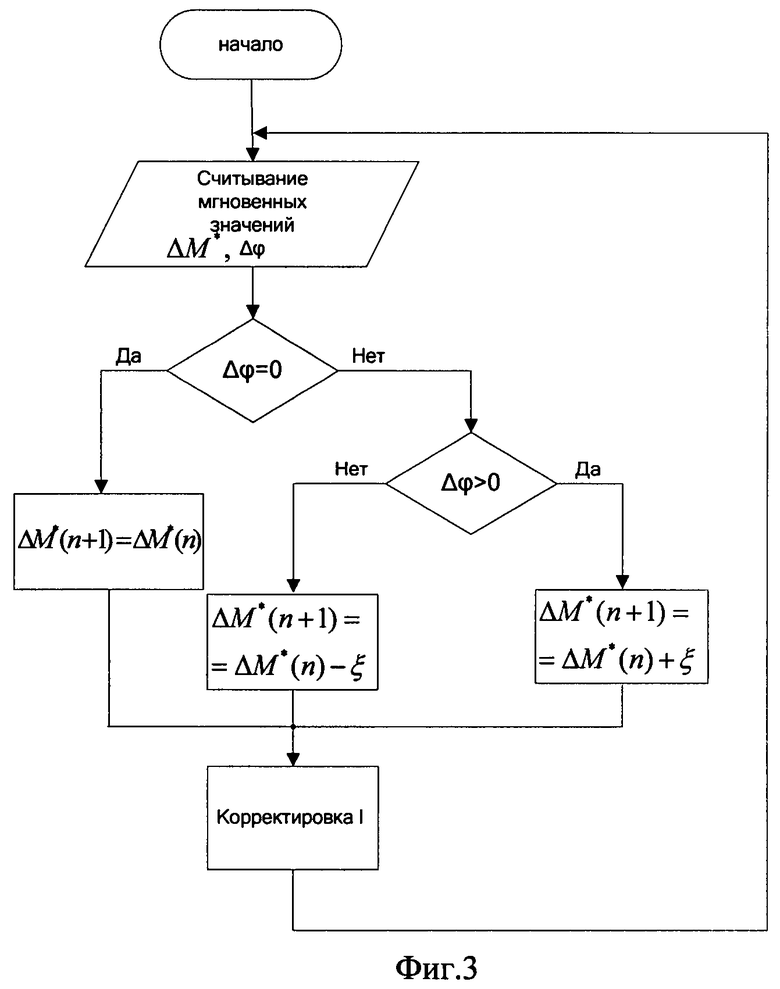
На фиг.1 приведена функциональная схема электропривода переменного тока; на фиг.2 показаны временные характеристики мгновенных значений тока статора и потокосцепления ротора и указаны временные интервалы, поясняющие работу блока 20 вычисления угла между векторами тока статора и потокосцепления ротора; на фиг.3 показан алгоритм работы блока коррекции задания момента двигателя 15.
Электропривод переменного тока содержит инвертор 1, два силовых выхода которого соединены через датчики тока 2 и 3 с двумя обмотками статора асинхронного двигателя 4, а третий выход инвертора 1 соединен с третьей обмоткой статора двигателя 4 напрямую. На валу двигателя 4 установлен датчик скорости 5. Управляющие входы инвертора 1 соединены с выходами блока широтно-импульсной модуляции (ШИМ) регулятора тока 6. Выходы датчиков тока 2, 3 соединены с входами сумматора фазных токов 7. Выходы датчиков тока 2, 3 наряду с выходом сумматора фазных токов 7 соединены с отрицательными фазными входами блока ШИМ регулятора тока 6. Выход датчика тока 5 соединен с отрицательным входом блока сравнения скорости 8, положительный вход которого подключен к блоку задания скорости 9, а выход блока сравнения 8 подключен ко входу регулятора скорости 10, выход которого подключен ко входу блока ограничений 11, выход которого подключен к первому входу сумматора сигналов задания момента 12, выход которого подключен ко входу формирователя задания модуля тока статора 13, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора 14. Второй вход сумматора сигналов задания момента 12 подключен к выходу блока коррекции задания момента двигателя 15, вход которого соединен с выходом блока 16 сравнения величин заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора. Три фазных выхода блока задания мгновенных значений тока статора 14 соединены с тремя положительными входами блока ШИМ регулятора тока 6, шесть выходов которого соединены с шестью управляющими входами трехфазного инвертора 1. Три фазных выхода блока 14 также соединены с первыми входами трех фазных блоков расчета потокосцепления ротора 17, 18, 19. Выходы трех фазных блоков расчета потокосцепления ротора 17, 18, 19 соединены с тремя первыми фазными входами блока вычисления угла между векторами потокосцепления ротора и тока статора 20. Выходы датчиков тока 2, 3 и выход сумматора токов 7 подключены ко вторым фазным входам блока вычисления угла между векторами потокосцепления ротора и тока статора 20, выход которого подключен к отрицательному входу блока сравнения величин заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора 16, положительный вход которого подключен к выходу блока задания угла между векторами тока статора и потокосцепления ротора 21. Выход датчика скорости 5 соединен с первым входом формирователя частоты вращения магнитного потока 22 и с первым входом блока расчета скольжения 23, второй вход которого соединен с выходом формирователя частоты вращения магнитного потока 22, второй вход которого соединен с выходом блока 24 задания разности частот вращения поля статора и ротора двигателя. Выход блока расчета скольжения 23 соединен с входом блока расчета постоянной времени интегрирования 25, выход которого соединен с вторыми входами трех фазных блоков расчета потокосцепления ротора 17, 18, 19. Выход блока задания частоты вращения ротора 9 подключен к первому входу сумматора 26, выход которого подключен к одному входу блока ограничения частоты вращения магнитного потока 27, к другому входу которого подключен выход формирователя частоты вращения магнитного потока 22, а выход блока ограничения частоты вращения магнитного потока 27 подключен к входу пропорционального блока 28, выход которого подключен к частотному входу блока задания мгновенных значений тока статора 14.
Электропривод переменного тока работает следующим образом.
Инвертор 1 через датчики 2,3 фазных токов и напрямую по третьему фазному проводу питает статорные обмотки асинхронного двигателя 4 широтно-модулируемыми пульсациями силового напряжения, длительность которых определяется управляющими пульсациями, поступающими с выхода ШИМ регулятора тока 6.
Формирование сигнала задания на амплитудные фазные входы блока ШИМ регулятора тока 6 происходит следующим образом. Сигнал задания на скорость ω* 2, поступающий с блока задания скорости 9, сравнивается с сигналом текущей скорости вращения ротора ω2, поступающего с датчика скорости 5. Формируемая таким образом разница сигналов поступает на вход регулятора скорости 10, сигнал с выхода которого поступает на блок ограничения 11. Сигнал с выхода блока ограничения 11 поступает на первый вход сумматора сигналов задания момента 12, на второй вход которого поступает корректирующий сигнал с выхода блока коррекции задания момента 15. Сигнал с выхода сумматора 12 поступает на вход формирователя задания модуля тока статора 13, с выхода которого задание на модуль тока статора поступает на первый вход блока 14, в котором формируются заданные мгновенные значения тока статора.
При разгоне двигателя скорость двигателя ω2 меньше заданного значения  и сигнал разности Δω2=-ω2 на выходе блока сравнения 8 не равен 0, пропорционально-интегральный регулятор скорости 10 вырабатывает сигнал, ограничиваемый блоком ограничения 11, который, проходя через сумматор 12, дает задание блоку 13 на формирование величины модуля пускового тока статора. После окончания разгона двигателя в установившемся режиме при достижении заданной скорости, когда Δω=0, сигнал с выхода пропорционально-интегрального регулятора скорости 10 становится меньше порогового значения, установленного блоком ограничения 11, этот сигнал поступает через сумматор 12 на блок 13, который формирует модуль тока статора в соответствии с величиной нагрузки на валу двигателя.
и сигнал разности Δω2=-ω2 на выходе блока сравнения 8 не равен 0, пропорционально-интегральный регулятор скорости 10 вырабатывает сигнал, ограничиваемый блоком ограничения 11, который, проходя через сумматор 12, дает задание блоку 13 на формирование величины модуля пускового тока статора. После окончания разгона двигателя в установившемся режиме при достижении заданной скорости, когда Δω=0, сигнал с выхода пропорционально-интегрального регулятора скорости 10 становится меньше порогового значения, установленного блоком ограничения 11, этот сигнал поступает через сумматор 12 на блок 13, который формирует модуль тока статора в соответствии с величиной нагрузки на валу двигателя.
Частота тока статора формируется следующим образом. С датчика скорости вращения ротора 5 поступает сигнал ω2 на первый вход формирователя частоты вращения магнитного потока 22, на второй вход которого также поступает сигнал  с блока задания разности частот вращения поля статора и ротора 24. Формирователь частоты вращения магнитного потока 22 проводит вычисление частоты вращения магнитного потока статора ω1 в соответствии с формулой:
с блока задания разности частот вращения поля статора и ротора 24. Формирователь частоты вращения магнитного потока 22 проводит вычисление частоты вращения магнитного потока статора ω1 в соответствии с формулой:

Сумматор 26, на входы которого поступают сигналы  с блока 9 и
с блока 9 и  с блока 24, проводит вычисление максимально допустимой частоты вращения магнитного потока
с блока 24, проводит вычисление максимально допустимой частоты вращения магнитного потока  в соответствии с формулой:
в соответствии с формулой:

Сигналы с выходов формирователя частоты вращения магнитного потока 22 и сумматора 26 поступают на вход блока ограничения 27, сигнал на выходе блока 27  определяется в соответствии с правилом
определяется в соответствии с правилом

Этот сигнал с выхода блока 27 поступает на вход пропорционального блока 28, осуществляющего пропорциональный перерасчет желаемой механической частоты вращения поля статора в электрическую частоту тока ротора  в соответствии с выражением
в соответствии с выражением

Сигнал с выхода блока 28 подается на частотный вход блока задания мгновенных значений тока статора 14.
В блоке задания мгновенных значений тока статора 14, в который поступают сигнал частоты  и сигнал задания на модуль тока статора
и сигнал задания на модуль тока статора  формируются сигналы задания мгновенных значений тока статора, зависящих от времени t, в соответствии с формулами:
формируются сигналы задания мгновенных значений тока статора, зависящих от времени t, в соответствии с формулами:
Сформированные таким образом сигналы задания на фазные токи статора поступают на фазные входы первой группы входов регулятора тока 6. На фазные входы второй группы входов регулятора тока 6 поступают сигналы с датчиков тока 2, 3 и сумматора токов 7. В регуляторе тока 6 сравниваются заданные и измеренные значения фазных токов статора и формируются на шести выходах сигналы управления, подаваемые на шесть управляющих входов трехфазного инвертора 1.
Момент двигателя формируется и поддерживается на заданном уровне путем поддержания на заданном уровне амплитуды тока статора I1, а также задания постоянной величины абсолютной разности между скоростями вращения поля статора и ротора  , контроля и поддержания на заданном уровне величины угла между векторами тока статора и потокосцепления ротора φ0.
, контроля и поддержания на заданном уровне величины угла между векторами тока статора и потокосцепления ротора φ0.
Момент асинхронного двигателя можно определить по формуле

где pn - число пар полюсов; Lm - взаимная индуктивность обмотки статора и ротора; Lr - собственная индуктивность обмотки ротора (Lr=Lm+L' 2σ); L' 2σ - приведенная индуктивность рассеяния ротора;  - вектор тока статора;
- вектор тока статора;  - вектор потокосцепления ротора; φ0 - угол между векторами тока статора и потокосцепления ротора.
- вектор потокосцепления ротора; φ0 - угол между векторами тока статора и потокосцепления ротора.
Операторные изображения потокосцепления ротора Ψr(p) и тока статора I1(р) связаны выражением

где Т- постоянная времени.


где  - приведенное сопротивление ротора; Sα - относительное скольжение.
- приведенное сопротивление ротора; Sα - относительное скольжение.
Уравнение момента двигателя (6) после преобразований имеет вид
Момент двигателя при постоянном значении тока статора будет максимальным при задании блоком 24 оптимального значения сигнала 

Оптимальное значение угла между векторами тока статора и потокосцепления ротора составляет φ0опт=45°.
Блок формирователя задания модуля тока статора 13 получает входной сигнал с сумматора 12, производит формирование задания модуля тока статора в соответствии с формулой

и подает этот сигнал на амплитудный вход блока задания мгновенных значений тока статора 14.
Блок вычисления угла φ0 между вектором тока статора и потокосцепления ротора 20 работает следующим образом. На входы блока 20 поступают измеренные мгновенные фазные значения тока статора I1 и мгновенные фазные значения потокосцепления ротора  , вычисленные с использованием выражения (7) в блоках 17, 18, 19, получающих на вход мгновенные заданные фазные значения токов статора
, вычисленные с использованием выражения (7) в блоках 17, 18, 19, получающих на вход мгновенные заданные фазные значения токов статора  . На фиг.2 показаны поясняющие работу блока 20 графики мгновенных значений I1 и
. На фиг.2 показаны поясняющие работу блока 20 графики мгновенных значений I1 и  и отмечены временные интервалы, позволяющие вычислить угол сдвига фаз φ0 между мгновенными значениями тока статора и потокосцепления ротора. Первоначально происходит фиксирование момента перехода тока статора I1 через нулевое значение (при переходе с отрицательного значения на положительное), этот момент времени t0 является началом отчета времени (t0=0). Затем при переходе графика потокосцепления ротора через нулевое значение (с отрицательного значения на положительное) фиксируется отсчитанное от нуля значение времени t1. Затем происходит фиксация момента перехода тока статора I1 через нулевое значение (с положительного на отрицательное) и запоминается отсчитанное от нуля значение времени t2. Используя измеренные значения времени, блок 20 вычисляет угол сдвига φ0 по следующему соотношению:
и отмечены временные интервалы, позволяющие вычислить угол сдвига фаз φ0 между мгновенными значениями тока статора и потокосцепления ротора. Первоначально происходит фиксирование момента перехода тока статора I1 через нулевое значение (при переходе с отрицательного значения на положительное), этот момент времени t0 является началом отчета времени (t0=0). Затем при переходе графика потокосцепления ротора через нулевое значение (с отрицательного значения на положительное) фиксируется отсчитанное от нуля значение времени t1. Затем происходит фиксация момента перехода тока статора I1 через нулевое значение (с положительного на отрицательное) и запоминается отсчитанное от нуля значение времени t2. Используя измеренные значения времени, блок 20 вычисляет угол сдвига φ0 по следующему соотношению:
Расчет угла φ0 происходит циклически с последующей передачей на отрицательный вход блока сравнения 16.
Блок расчета скольжения 23 рассчитывает относительное скольжение Sα по формуле (9). В блоке 25 расчета постоянной времени интегрирования T(Sα) производится операция расчета по формуле (8), и рассчитанная величина T(Sα) вводится в фазные блоки расчета потокосцепления ротора 17, 18, 19. Работа блока коррекции задания момента двигателя 15 описывается алгоритмом, представленным на фиг.3. На вход блока 15 с выхода блока сравнения 16 поступает разность углов Δφ между заданным значением угла  , задаваемым блоком 21, и вычисленным значением φ0, поступающим с блока 20. Если Δφ<0, то происходит уменьшение сигнала коррекции задания момента с шагом убывания ξ=0.0005 Мн, продолжающееся до тех пор, пока угол φ0 не станет равным 45°, если Δφ>0, то происходит увеличение сигнала коррекции задания момента с шагом приращения ξ=0.0005 Мн, продолжающееся до тех пор, пока угол φ0 не станет равным 45°, если Δφ=0, то ΔМ*=0. Считывание мгновенных значений угла происходит циклически с дискретностью, определяемой быстродействием системы.
, задаваемым блоком 21, и вычисленным значением φ0, поступающим с блока 20. Если Δφ<0, то происходит уменьшение сигнала коррекции задания момента с шагом убывания ξ=0.0005 Мн, продолжающееся до тех пор, пока угол φ0 не станет равным 45°, если Δφ>0, то происходит увеличение сигнала коррекции задания момента с шагом приращения ξ=0.0005 Мн, продолжающееся до тех пор, пока угол φ0 не станет равным 45°, если Δφ=0, то ΔМ*=0. Считывание мгновенных значений угла происходит циклически с дискретностью, определяемой быстродействием системы.
Преимущество предлагаемого электропривода переменного тока заключается:
- в использовании минимального количества блоков с изменяемой в функции скольжения постоянной времени;
- в учете динамики изменения фазных значений потокосцепления ротора в зависимости от изменения фазных значений тока статора, что повышает быстродействие и точность электропривода.
Источники информации
1. Патент РФ №2254666, МПК Н02Р 7/42. Электропривод переменного тока. Левин П.Н., Мещеряков В.Н. Приоритет 26.01.2004. Опубл. 20.06.2005. Бюл. №17.
2. Патент РФ 2396696, МПК Н02Р 27/04. Электропривод переменного тока. В.Н.Мещеряков, В.А.Корчагина. Опубл. 10.08.2010. Бюл. №.22.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
Изобретение относится к области электротехники, в частности к регулируемым электроприводам переменного тока. Технический результат заключается в упрощении конструкции и повышении динамических показателей. В электропривод переменного тока введен блок коррекции задания момента двигателя, с помощью которого формируется вектор тока статора путем формирования мгновенных фазных значений тока статора, амплитуда и частота которых зависят от сигналов задания и сигналов коррекции. Путем поддержания на оптимальном уровне амплитуды и частоты тока статора достигается формирование оптимального угла φ0 между векторами тока статора и потокосцепления ротора, равного 45°, и обеспечивается минимизация потребления тока статора. Поддержание оптимального угла φ0 обеспечивается с помощью замкнутого контура управления углом, измерение угла φ0 осуществляется путем измерения угла сдвига фаз между мгновенными значениями тока статора и вычисленными значениями потокосцепления ротора. Инвертором формируются фазные токи статора с частотой и амплитудой, необходимой для формирования заданного значения момента при условии минимизации потребления тока статора и наиболее полного использования магнитопровода. Электропривод работает с реальной трехфазной системой координат, что позволит исключить преобразователи координат, усложняющие расчет и увеличивающие требования к управляющему контроллеру. 3 ил.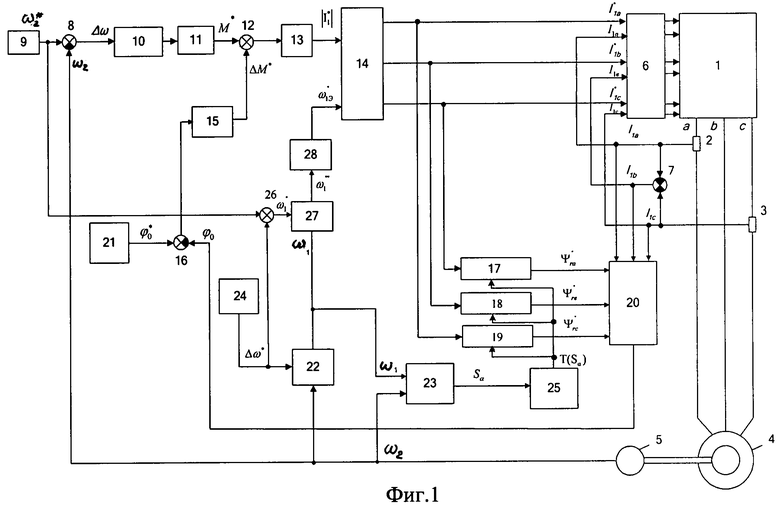
Электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, датчик скорости, установленный на валу асинхронного двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен к входу пропорционально-интегрального регулятора скорости, выходы двух датчиков фазного тока соединены с входами сумматора фазных токов, а также соединены с двумя входами первой группы фазных входов блока ШИМ-регулятора тока, а также соединены с двумя входами первой группы фазных входов блока вычисления угла между вектором тока статора и параметра намагничивания, выход сумматора фазных токов соединен с третьим входом первой группы фазных входов ШИМ-регулятора тока и с третьим входом первой группы фазных входов блока вычисления угла между вектором тока статора и параметра намагничивания, выход блока расчета угла между векторами тока статора и параметра намагничивания соединен с отрицательным входом блока сравнения угла между векторами тока статора и параметра намагничивания, положительный вход которого соединен с блоком задания этого угла, выход датчика скорости также соединен с одним входом формирователя частоты вращения магнитного потока и с первым входом блока расчета скольжения, второй вход которого соединен с выходом блока формирования частоты вращения магнитного потока, второй вход которого соединен с выходом блока задания разности частот вращения поля статора и ротора двигателя, выход формирователя частоты вращения магнитного потока соединен с одним входом блока ограничения частоты вращения магнитного потока, выход блока расчета скольжения соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с первыми входами трех фазных блоков расчета параметра намагничивания, отличающийся тем, что параметром намагничивания двигателя является потокосцепление ротора, выход регулятора скорости подключен к входу блока ограничения, выход которого подключен к первому входу сумматора сигналов задания момента, ко второму входу которого подключен выход блока коррекции задания момента двигателя, вход которого подключен к выходу блока сравнения величин заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, выход сумматора сигналов задания момента подключен к входу формирователя задания модуля тока статора, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора, три фазных выхода которого соединены с тремя фазными входами второй группы входов инвертора, три фазных выхода блока задания мгновенных значений тока статора также соединены со вторыми входами трех фазных блоков расчета потокосцепления ротора, выходы которых соединены с тремя фазными входами второй группы входов блока вычисления угла между векторами тока статора и потокосцепления ротора, выход блока задания скорости соединен с одним входом сумматора сигналов скорости, со вторым входом которого соединен выход блока задания разности частот вращения поля статора и ротора двигателя, выход сумматора сигналов скорости соединен с другим входом блока ограничения частоты вращения магнитного потока, выход которого соединен с входом пропорционального блока, выход которого соединен с частотным входом блока задания мгновенных значений тока статора.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| СПОСОБ ЛЕЧЕНИЯ ВОЛЧАНКИ | 2005 |
|
RU2396980C2 |
| DE 69114120 T2, 04.04.1996 | |||
| US 6166514 A1, 26.12.2000 | |||
| JP 59067896 A, 12.10.1982 | |||
| EP 0790701 B1, 16.05.2001. | |||

