ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
В настоящей заявке используются материалы корейской заявки №2004-81200, поданной 12 октября 2004 года в Корейское бюро по защите интеллектуальной собственности, и содержание этой заявки включено в настоящее описания путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение относится к роботу-уборщику, предназначенному для работы в автоматическом режиме, а более конкретно к способу коррекции координат автоматического робота-уборщика.
Описание известных технических решений
Обычно робот-уборщик определяет очищаемую область с использованием датчиков, например ультразвуковых датчиков, установленных на основном корпусе, или в соответствии с информацией, введенной пользователем. Затем робот-уборщик планирует наиболее эффективную для уборки траекторию движения. Согласно этому плану, робот-уборщик перемещается и управляет работой пылесосной части с целью всасывания пыли с пола.
Один из способов перемещения такого робота-уборщика по запланированному пути состоит в том, что робот-уборщик вычисляет текущее положение с использованием абсолютной системы координат. Другой способ состоит в том, что движение робота-уборщика основано на относительной системе координат с использованием пройденного расстояния и угла поворота относительно базового местоположения очищаемой области.
Согласно одному из примеров использования абсолютной системы координат, робот-уборщик с помощью камеры на приборах с зарядовой связью (ПЗС-камеры) получает изображение предметов на потолке, например потолочных ламп или локальных опознавательных меток, которые могут быть специально установлены на потолке, и, соответственно определяет свое текущее положение на основе полученных изображений. Однако использование ПЗС-камеры приводит к слишком высокой стоимости, поскольку требуется, чтобы система быстро обрабатывала большое количество данных.
Согласно одному из примеров использования относительной системы координат, робот-уборщик оборудован датчиком пройденного расстояния и угловым датчиком, который может измерять угол поворота робота-уборщика. В качестве датчика пройденного расстояния для измерения количества оборотов колес в общем случае используется преобразователь угол-код, а в качестве углового датчика в общем случае используется гироскопический датчик, который способен измерять относительный угол поворота. При использовании гироскопического датчика управление оказывается простым, поскольку робот-уборщик может при необходимости поворачиваться на точно заданный угол. Однако гироскопический датчик обычно имеет погрешность в пределах от 5% до 10%, и при многократных поворотах робота-уборщика возникает проблема, поскольку погрешность накапливается. В результате возможна ситуация, когда робот-уборщик не следует точно по запланированному пути.
На фиг.1 в несколько преувеличенном виде показано, как робот-уборщик отклоняется от запланированного пути вследствие погрешности измерения гироскопического датчика. Робот-уборщик 1 стартует из начальной точки S и движется согласно расчетам прямо к точке А. Используя гироскопический датчик, робот-уборщик 1 поворачивается на 90° и согласно расчетам должен попасть прямо в точку В. Однако на этот раз робот-уборщик 1 сбивается с нужного направления и не попадает в место назначения, то есть в точку В, а вместо этого достигает точки В'. Затем робот-уборщик 1 поворачивается на 90° с использованием гироскопического датчика, движется дальше согласно вычислениям и считает, что достиг точки С. Однако вновь вследствие погрешности гироскопического датчика робот-уборщик 1 фактически не следует по запланированному пути, а вместо этого достигает смещенной точки С'. Поскольку погрешность обнаружения накапливается, смещение в точках С, С' больше, чем в точках В, В'. По мере того как робот-уборщик 1 последовательно перемещается через точки D, Е, F и G, погрешность измерения гироскопического датчика увеличивается. В результате робот-уборщик 1 по мере работы все больше отклоняется от запланированного пути. Когда робот-уборщик 1 заканчивает уборку, остаются некоторые неубранные области.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение призвано устранить вышеупомянутые недостатки и решить другие проблемы, присущие известным устройствам. Целью настоящего изобретения является создание такого способа коррекции для системы координат робота-уборщика, чтобы робот-уборщик мог эффективно следовать по запланированному направлению движения с использованием углового датчика, например гироскопического датчика.
Другой целью настоящего изобретения является создание робота-уборщика, в котором используется такой способ коррекции системы его координат, что робот-уборщик может эффективно следовать по запланированному направлению движения при использовании углового датчика, например гироскопического датчика.
Вышеупомянутые цели и/или другие признаки настоящего изобретения по существу могут быть достигнуты при использовании способа коррекции координат робота-уборщика, который включает этап ожидания, когда робот-уборщик находится в ждущем режиме у станции подзарядки, этап работы, на котором робот-уборщик перемещается в рабочую область и выполняет заданную работу, этап возврата, на котором робот-уборщик прерывает заданную работу после того, как определит, что значение накопленного угла превышает заданный уровень, и возвращается к станции подзарядки, этап коррекции координат, на котором текущие координаты робота-уборщика корректируются с помощью базовых координат станции подзарядки, и этап возобновления работы, на котором робот-уборщик перемещается в предыдущее место, где он находился до того, как возвратился к станции подзарядки, и возобновляет заданную работу.
Этап коррекции координат включает позиционирование робота-уборщика на базовых координатах станции подзарядки с помощью множества датчиков расстояния и установку текущих координат робота-уборщика на начало координат.
Станция подзарядки включает базовую пластину, которая расположена по существу перпендикулярно полу, по которому перемещается робот-уборщик.
Согласно одному из аспектов настоящего изобретения, автоматическая система уборки включает станцию подзарядки и робота-уборщика, содержащего множество датчиков расстояния и управляющую часть для корректировки его координат по базовым координатам станции подзарядки с помощью множества датчиков расстояния.
Множество датчиков расстояния расположены рядом друг с другом, причем их передающие части ориентированы по существу перпендикулярно оси ведущего колеса робота-уборщика. Множество датчиков расстояния установлены вдоль прямой линии, причем их передние стороны по существу параллельны оси ведущего колеса.
Станция подзарядки включает базовую пластину, которая расположена по существу перпендикулярно полу, по которому перемещается робот-уборщик.
Управляющая часть управляет роботом-уборщиком таким образом, что он прерывает заданную работу после того, как определит, что значение накопленного угла превышает заданный уровень, и возвращается к станции подзарядки, где текущие координаты робота-уборщика выравниваются относительно базовых координат станции подзарядки с помощью множества датчиков расстояния, и текущие координаты робота-уборщика сбрасываются на начало координат.
При использовании способа коррекции координат робота-уборщика согласно настоящему изобретению, когда накопленная ошибка углового датчика превысит заданный уровень, начало координат робота-уборщика выравнивают относительно системы координат станции подзарядки. Соответственно накопленную ошибку углового датчика периодически можно корректировать до 0 и поэтому следование роботом-уборщиком по своему пути становится более точным.
Кроме того, при использовании автоматической системы уборки согласно настоящему изобретению следование роботом-уборщиком по своему пути становится более точным, поскольку начало координат робота-уборщика может быть выравнено относительно системы координат станции подзарядки с помощью датчиков расстояния робота-уборщика, когда накопленная ошибка углового датчика превышает заданный уровень.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые аспекты и признаки настоящего изобретения станут понятнее из описания некоторых вариантов выполнения изобретения со ссылками на сопровождающие чертежи, где:
на фиг.1 представлен запланированный рабочий путь робота-уборщика и путь с учетом отклонения робота-уборщика при его реальном перемещении;
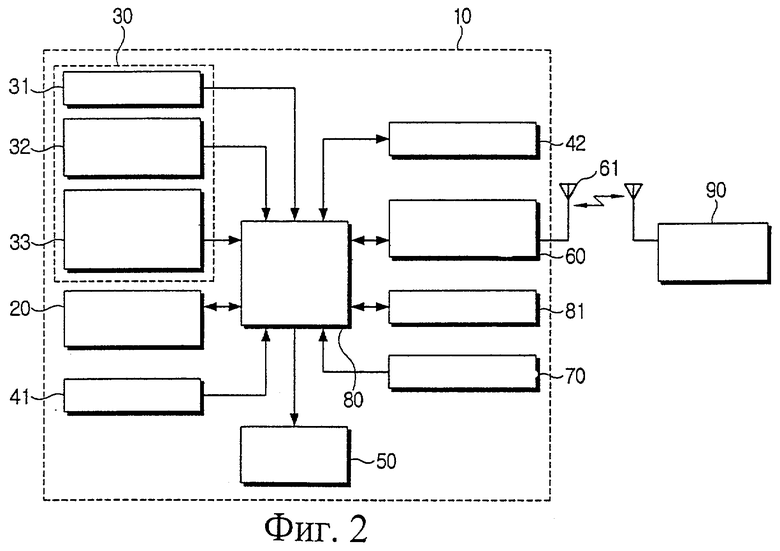
на фиг.2 показана блок-схема робота-уборщика, в котором используется способ коррекции координат согласно одному из вариантов выполнения настоящего изобретения;
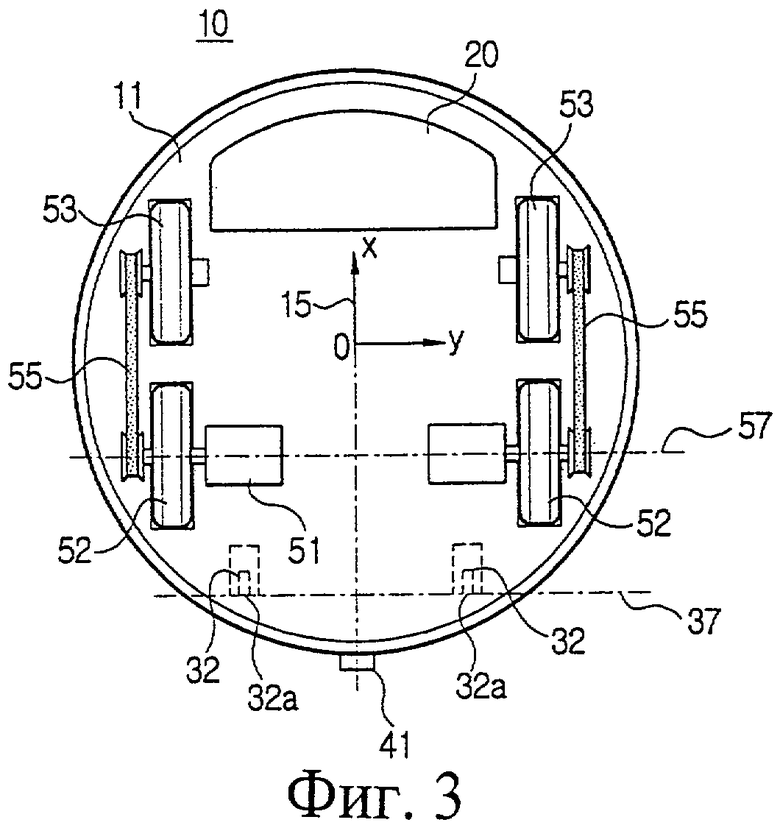
на фиг.3 показан вид снизу робота-уборщика, изображенного на фиг.2;
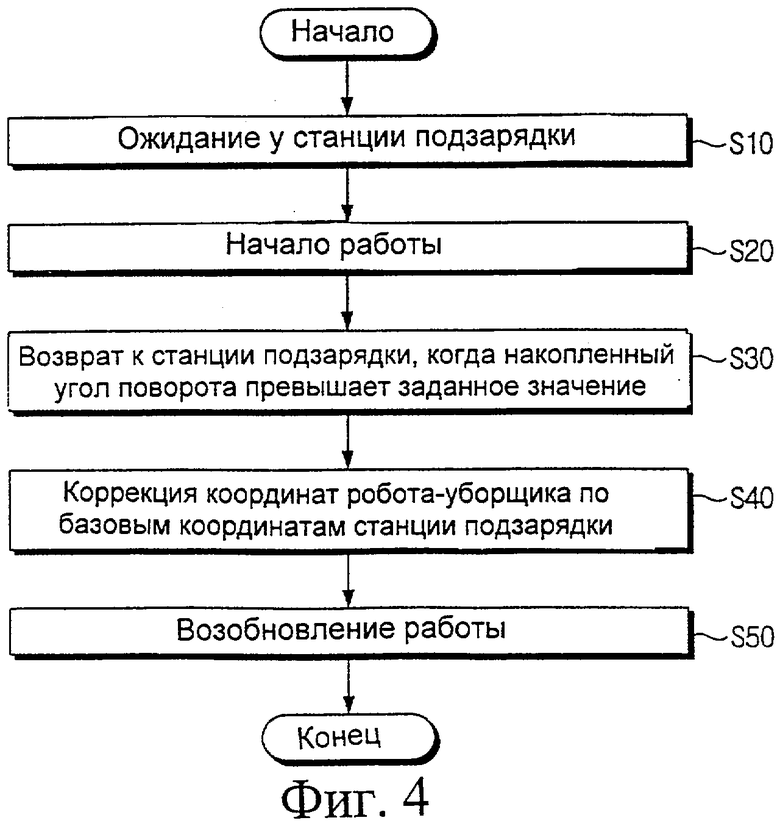
на фиг.4 показана блок-схема алгоритма, поясняющая способ коррекции координат робота-уборщика согласно одному из вариантов выполнения настоящего изобретения;
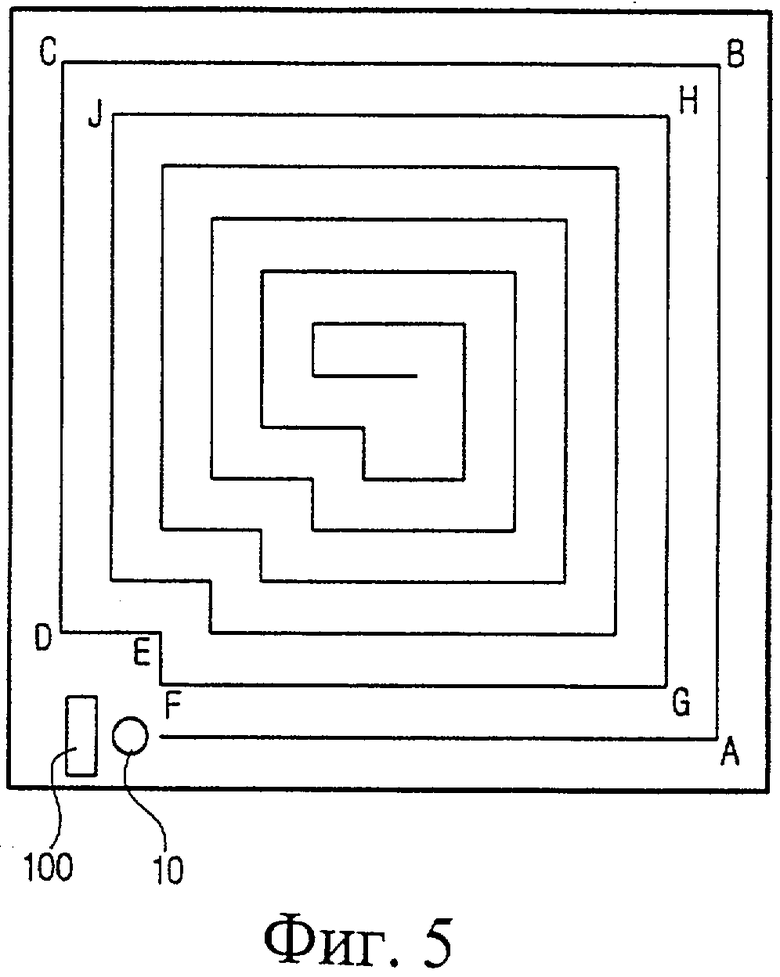
на фиг.5 представлен путь робота-уборщика с целью пояснения способа коррекции его координат согласно одному из вариантов выполнения настоящего изобретения;
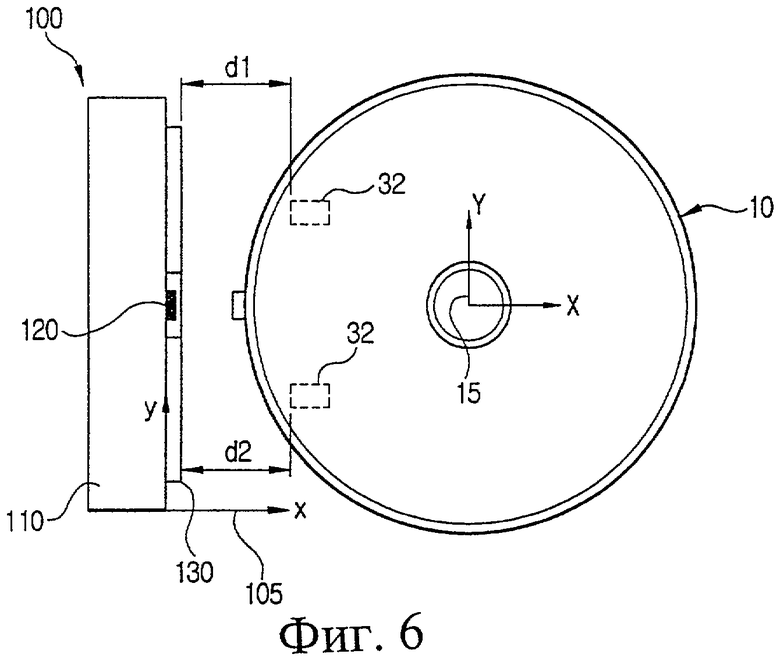
на фиг.6 показан вид сверху, поясняющий автоматическую систему уборки, в которой используется способ коррекции координат согласно одному из вариантов выполнения настоящего изобретения; и
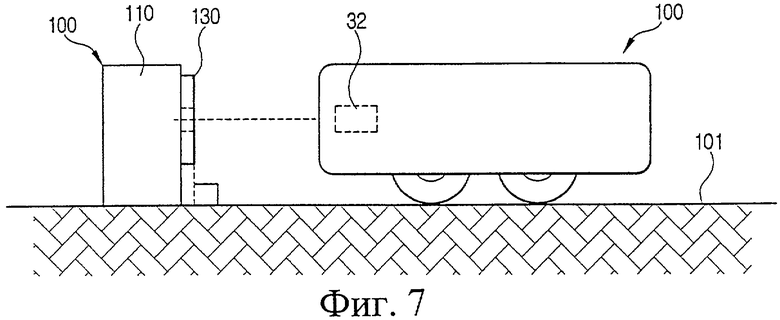
на фиг.7 показан вид автоматической системы уборки, показанной на фиг.6, сбоку.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Ниже некоторые варианты выполнения настоящего изобретения будут описаны более подробно со ссылками на сопровождающие чертежи.
В последующем описании одинаковые элементы на разных чертежах обозначены одинаковыми позициями. В настоящем описании детали конструкции и элементов даны только для лучшего понимания изобретения. Таким образом, понятно, что настоящее изобретение может быть осуществлено без этих конкретных деталей. Кроме того, известные функции или конструкции не описываются подробно для ясности изложения изобретения, без ненужных подробностей.
На фиг.2 и 3 схематично изображен робот-уборщик 10 согласно одному из вариантов выполнения настоящего изобретения; робот-уборщик содержит пылесосную часть 20, блок 30 датчиков, переднюю камеру 41, верхнюю камеру 42, приводную часть 50, передающую/приемную часть 60, блок 70 электропитания, запоминающее устройство 81 и управляющую часть 80, все они установлены в основном корпусе 11 в соответствующих местах.
Пылесосная часть 20 может иметь различную форму, главное, - чтобы она эффективно втягивала содержащий пыль воздух с очищаемой поверхности. В одном из примеров пылесосная часть 20 может содержать двигатель для всасывания, щетку для всасывания, которая втягивает воздух с пылью с использованием силы всасывания двигателя, и пылеуловительную камеру, расположенную между двигателем и щеткой. Пылеуловительная камера имеет всасывающее отверстие и выходное отверстие, связанные со щеткой для всасывания и двигателем для всасывания соответственно. В результате воздух втягивается через всасывающее отверстие, пыль отделяется в пылеуловительной камере, а очищенный воздух выходит через выходное отверстие.
Блок 30 датчиков включает датчик 32 расстояния, который может измерить расстояние до станции 100 подзарядки (см. фиг.6), датчик 33 пройденного расстояния, который может измерить расстояние, пройденное роботом-уборщиком 10, и угловой датчик 31, который может измерить угол поворота робота-уборщика 10.
Угловой датчик 31 используется в ситуации, когда робот-уборщик 10 поворачивается для изменения направления движения. Более конкретно угловой датчик 31 измеряет угол поворота робота-уборщика 10 относительно текущего направления движения. В качестве углового датчика 31 предпочтительно может использоваться гироскопический датчик.
Для измерения расстояние до станции 100 подзарядки множество датчиков 32 расстояния может быть установлено на передней стороне основного корпуса 11. Как показано на фиг.3, множество датчиков 32 расстояния может быть установлено так, чтобы их передающие части 32а были по существу перпендикулярны к воображаемой линии 57, которая соединяет оси, точнее центры осей двух колес 52. Если смотреть спереди, множество датчиков 32 расстояния установлены параллельно через одинаковые интервалы. Кроме того, предпочтительно, чтобы воображаемая линия 37, которая соединяет передние стороны датчиков 32 расстояния, была параллельна воображаемой линии 57, которая соединяет центры осей колес 52, чтобы передающие стороны передающих частей 32а датчиков 32 расстояния были на одинаковом расстоянии от колес 52. Как показано на фиг.3, если в роботе-уборщике 10 имеется два датчика 32 расстояния, и ось колес 52 перпендикулярна передающим частям 32а, а линия 37, соединяющая передние стороны передающих частей 32а, параллельна оси колес 52, то такой робот-уборщик 10 находится под прямым углом относительно базовой пластины 130, расположенной в станции 100 подзарядки, когда расстояния, измеренные двумя датчиками 32 расстояния, от базовой пластины 130, расположенной в станции 100 подзарядки (см. фиг.6), одинаковы. Другими словами, оси х и y системы 15 координат робота-уборщика 10 параллельны осям х и y системы 105 координат станции 100 подзарядки (см. фиг.6).
В качестве датчика 32 расстояния может использоваться любой датчик, который способен послать сигнал во внешнее пространство, принять сигнал, отраженный от предмета, и измерить расстояние до предмета на основе полученного сигнала. Например, может использоваться инфракрасный датчик, имеющий светоизлучающий элемент, который испускает луч инфракрасного света, и светоприемный элемент, принимающий отраженный инфракрасный свет. Альтернативно в качестве датчика 32 расстояния может также использоваться лазерный датчик, который испускает лазерный луч и принимает отраженный лазерный луч с возможностью измерения расстояния. Если имеется множество инфракрасных датчиков или ультразвуковых датчиков, используемых как датчики препятствий, некоторые из этих датчиков могут использоваться в качестве датчиков 32 расстояния, если их установить согласно требованиям к датчикам 32 расстояния.
В качестве датчика пройденного расстояния 33 может также использоваться датчик оборотов. Например, в качестве датчика вращения может использоваться преобразователь, применяемый для измерения количества оборотов вала двигателя. Соответственно управляющая часть 80 может вычислить пройденное роботом-уборщиком 10 расстояние с использованием количества оборотов вала, измеренного преобразователем.
Передняя камера 41 установлена на основном корпусе 11 для получения изображения пространства перед роботом-уборщиком 10 и подачи полученных изображений в управляющую часть 80. Верхняя камера 42 установлена на основном корпусе 11 для получения изображения пространства над роботом-уборщиком 10 и подачи полученных изображений в управляющую часть 80. Как передняя, так и верхняя камера 41 и 42 предпочтительно являются ПЗС-камерами. Передняя и верхняя камеры 41 и 42 устанавливаются по выбору, когда есть необходимость. Например, передняя камера 41 может использоваться для контроля местоположения станции 100 подзарядки путем обнаружения опознавательных меток (не показаны) на станции 100 подзарядки, в то время как верхняя камера 42 может использоваться для контроля местоположения станции 100 подзарядки путем обнаружения меток (не показаны) над станцией 100 подзарядки.
Приводная часть 50 включает два ведущих колеса 52, расположенных по бокам спереди, и два ведомых колеса 53, расположенных по бокам сзади, два приводных двигателя 51 для вращения двух передних ведущих колес 52 соответственно, и трансмиссионное средство 55, предназначенное для передачи движущей силы от ведущих колес 52 к ведомым колесам 53. Трансмиссионное средство 55 может включать зубчатый ремень и шкив. Кроме того, трансмиссионное средство 55 может быть выполнено из шестерен. Ведущие колеса 52 могут быть установлены так, что их центральные оси расположены на одной линии. Соответствующие приводные двигатели 51 приводной части 50 вращаются вперед или назад независимо и в соответствии с управляющим сигналом из управляющей части 80. Направление движения можно менять путем соответствующего управления скоростями вращения приводных двигателей 51.
Передающая/приемная часть 60 посылает данные через антенну 61 и передает сигнал из антенны 61 в управляющую часть 80. Соответственно робот-уборщик 10 может передавать сигналы во внешнее устройство 90 и получать сигналы оттуда через передающую/приемную часть 60. Внешнее устройство 90 может включать компьютерную систему или удаленный контроллер вместе с программой, обеспечивающей контроль и управление роботом-уборщиком 10.
Источник 70 питания содержит аккумуляторную батарею, в которой запасается электроэнергия, поступающая через силовые клеммы 120 из станции 100 подзарядки. Источник 70 питания снабжает электроэнергией соответствующие компоненты робота-уборщика 10, так что робот-уборщик 10 может перемещаться и функционировать автономно.
Управляющая часть 80 производит обработку сигналов, полученных через передающую/приемную часть 60, и управляет соответствующими частями робота-уборщика 10 согласно программе. Управляющая часть 80 действует так, что робот-уборщик 10 перемещается вдоль стен или препятствий с использованием датчика препятствий (не показан), определяет область, которую необходимо очистить, и сохраняет в запоминающем устройстве 81 эту определенную область. Рабочая область робота-уборщика может также быть введена в запоминающее устройство 81 пользователем. Управляющая часть 80 вычисляет путь, перемещаясь по которому робот-уборщик 10 способен перемещаться наиболее эффективно и осуществлять необходимые операции в отношении рабочей области, хранимой в запоминающем устройстве 81. Затем управляющая часть 80 управляет приводной частью 50 и пылесосной частью 20 с использованием датчика 33 пройденного расстояния и углового датчика 31, так что робот-уборщик 10 перемещается вдоль вычисленного пути и выполняет предписанные операции, например, по уборке. Когда предписанная операция закончена или когда необходима подзарядка, управляющая часть 80 управляет приводной частью 50 так, чтобы робот-уборщик 10 смог возвратиться к станции 100 подзарядки. Используя общеизвестные способы определения местоположения и переднюю камеру, верхнюю камеру или ультразвуковую камеру, управляющая часть 80 осуществляет управление таким образом, что робот-уборщик 10 способен возвратиться к станции 100 подзарядки. Это не будет описываться подробно, поскольку хорошо известно.
Во время перемещения и предписанной работы робота-уборщика 10 управляющая часть 80 суммирует углы поворота робота-уборщика 10 и вычисляет накопленную сумму, а когда накопленная сумма превысит заданную величину, управляющая часть 80 прерывает работу робота-уборщика. Затем управляющая часть 80 управляет приводной частью 50 с использованием множества датчиков 32 расстояния для возврата робота-уборщика 10 в станцию 100 подзарядки, так чтобы робот-уборщик 10 оказался в месте с координатами, соответствующими базовым координатам х и y системы 105 координат станции 100 подзарядки. Затем управляющая часть 80 корректирует текущие координаты робота-уборщика 10, устанавливая их на начало координат.
Робот-уборщик 10 вышеописанной конструкции совместно со станцией 100 подзарядки составляют автоматическую систему уборки. На фиг.6 и 7 показана станция 100 подзарядки, которая содержит корпус 110, установленный на полу 101, силовые клеммы 120, установленные на боковой стороне корпуса 110 и соединенные с обычным источником питания для подачи электроэнергии, и базовую пластину 130, расположенную, по существу, перпендикулярно полу 101 там, где расположена станция 100 подзарядки. Базовая пластина 130 имеет достаточные размеры для отражения всех сигналов множества датчиков 32 расстояния, расположенных в роботе-уборщике 10. Пол 101, на котором расположена станция 100 подзарядки, предпочтительно является ровным, чтобы робот-уборщик 10 мог измерять расстояние до базовой пластины 130 с помощью датчиков 32 расстояния и корректировать координаты с высокой точностью.
Ниже более подробно со ссылками на фиг.4-7 описан способ коррекции координат робота-уборщика. Более конкретно способ коррекции координат будет описан на конкретном примере, в котором робот-уборщик 10 осуществляет коррекцию координат в процессе работы по уборке помещения.
Вначале робот-уборщик 10 находится в ждущем состоянии у станции 100 подзарядки (шаг S10). Робот-уборщик 10 заносит в память область, которую необходимо очистить, и уже закончил расчет пути для эффективной уборки намеченной области.
При получении сигнала пуска робот-уборщик 10 покидает станцию 100 подзарядки, перемещается по запланированному пути и производит уборку (шаг S20). Используя датчик 33 пройденного расстояния и угловой датчик 31, управляющая часть 80 управляет приводной частью 50 так, чтобы робот-уборщик 10 мог следовать по запланированному пути. На фиг.5 показано, что робот-уборщик 10, покинув станцию 100 подзарядки, перемещается к точке А, при этом датчик 33 пройденного расстояния проверяет, достиг ли робот-уборщик 10 точки А. Когда робот-уборщик 10 достигает точки А, он поворачивается на 90° с использованием углового датчика 31 и встает на следующую траекторию. Затем робот-уборщик 10 перемещается по прямой линии к точке В и с помощью датчика 33 пройденного расстояния проверяет, достигнута точка В или нет. Достигнув точки В, робот-уборщик поворачивается на 90° с использованием углового датчика 31 и встает на траекторию пути к следующей точке назначения С. Затем управляющая часть 80 с помощью датчика 33 пройденного расстояния и углового датчика 31 управляет приводной частью 50, чтобы робот-уборщик следовал по запланированному пути.
Управляющая часть 80 управляет приводной частью 50 так, что робот-уборщик 10 перемещается по запланированному пути и периодически проверяет, не превышает ли накопленный угол поворота робота-уборщика 10 заданную величину. Накопленный угол поворота равен сумме углов поворота робота-уборщика 10, которые измерены с помощью углового датчика 31, когда робот-уборщик 10 поворачивает в процессе работы. Например, как показано на фиг.5, накопленный угол поворота робота-уборщика 10 в точке С равен 180° и складывается из 90° в точке А и 90° в точке В.
Соответственно управляющая часть 80 суммирует углы поворота робота-уборщика 10, которые регистрируются с помощью углового датчика 31 каждый раз, когда робот-уборщик 10 совершает поворот, запоминает полученную накопленную сумму углов поворота и сравнивает накопленную сумму углов поворота с заданным значением накопленного угла поворота. Заданное значение накопленного угла поворота может быть установлено пользователем. Однако предпочтительно, чтобы заданное значение накопленного угла поворота было по возможности более высоким, но находилось в пределах, которые не позволяют накопленной ошибке углового датчика 31 влиять на работу робота-уборщика 10 так, что в результате некоторые места в области уборки могут остаться неубранными. Соответственно необходимо, чтобы заданное значение накопленного угла поворота было установлено с учетом точности углового датчика 31 и эффективности уборки пылесосной части 20.
Когда накопленный угол поворота превышает заданное значение, управляющая часть 80 прерывает работу по уборке и управляет приводной частью 50 для возврата робота-уборщика 10 к станции 100 подзарядки (шаг S30). Обратимся к фиг.5, например, если заданное значение накопленного угла поворота равно 630°, управляющая часть 80 прерывает работу по уборке, когда робот-уборщик 10 доходит до точки Н, и управляет возвращением робота-уборщика 10 к станции 100 подзарядки. При этом для возврата робота-уборщика 10 к станции 100 подзарядки управляющая часть 80 использует ультразвуковые датчики либо верхнюю или переднюю камеры, установленные на основном корпусе 11.
Когда робот-уборщик 10 прибывает к станции 100 подзарядки, управляющая часть 80 корректирует координаты так, что система 15 координат х и y робота-уборщика 10 становится параллельной системе 105 координат х и y станции 100 подзарядки, а начало системы 15 координат х и y соответствует базовым координатам, которые находятся на заданном расстоянии от точки начала координат системы 105 координат х и y станции 100 подзарядки (шаг S40). Базовые координаты представляют собой абсолютную систему координат, в которой координаты станции 100 подзарядки являются точкой начала координат. Базовые координаты могут быть установлены пользователем заранее. Вышеупомянутая операция включает операцию, при которой управляющая часть 80 робота-уборщика 10 управляет им так, чтобы ориентировать робота-уборщика 10 перпендикулярно базовой пластине 130 станции 100 подзарядки с использованием множества датчиков 32 расстояния, и операцию, при которой текущие координаты робота-уборщика 10 корректируют, устанавливая их равными базовым координатам станции 100 подзарядки.
Ниже более подробно описана работа управляющей части 80 по ориентации робота-уборщика 10 перпендикулярно базовой пластине 130 станции 100 подзарядки с использованием двух датчиков 32 расстояния.
Когда робот-уборщик 10 возвращается к станции 100 подзарядки, управляющая часть 80 с помощью двух датчиков 32 расстояния измеряет расстояния d1 и d2 до базовой пластины 130 и определяет, равны ли между собой измеренные расстояния d1 и d2. Если измеренные двумя датчиками 32 расстояния d1 и d2 отличаются друг от друга, управляющая часть 80 управляет приводной частью 50 так, чтобы расстояния d1 и d2, измеренные двумя датчиками 32 расстояния, стали равны между собой. В результате система 15 координат х и y робота-уборщика 10 становится параллельной системе 105 координат х и y станции 100 подзарядки. Затем управляющая часть 80 управляет приводной частью 50 так, чтобы измеренные расстояния d1 и d2 стали равны заданным расстояниям. В результате точка 0 начала координат системы 15 координат х и y робота-уборщика 10 совпадет с базовыми координатами х и y системы 105 координат станции 100 подзарядки. Соответственно, как только управляющая часть 80 сбрасывает координаты робота-уборщика 10 в точку начала координат, корректировка координат завершается. Поскольку робот-уборщик 10 возвратился к станции 100 подзарядки, и начало его системы координат выравнено относительно системы координат станции 100 подзарядки, которая служит абсолютной системой координат, ошибка в накопленном угле поворота, возникшая в результате ошибок измерений углового датчика 31, обнуляется.
Когда коррекция координат завершена, управляющая часть 80 управляет приводной частью 50 так, чтобы робот-уборщик 10 смог вернуться к месту, где он находился до перемещения к станции 100 подзарядки. Например, если вернуться к примеру, показанному на фиг.5, роботом-уборщиком 10 управляют так, что он возвращается назад к точке Н. Более конкретно управляющая часть 80 вновь вычисляет путь к предыдущей рабочей точке на основании информации о ее местоположении и возвращает робота-уборщика 10 обратно с помощью датчика 33 пройденного расстояния и углового датчика 31. Когда робот-уборщик 10 возвратится назад в предыдущую рабочую точку, он возобновляет прерванную работу, следуя по первоначально запланированному пути. Согласно настоящему изобретению, описанному выше на примере нескольких вариантов его выполнения, робот-уборщик 10 возвращается к станции 100 подзарядки и корректирует координаты относительно исходной точки, прежде чем накопленная погрешность углового датчика 31 приведет к тому, что некоторые участки останутся неубранными. Соответственно, когда робот-уборщик 10 выполняет операцию по уборке, накопленная погрешность углового датчика 31 может оставаться ниже заданного уровня. В результате, поскольку робот-уборщик 10 может выполнить операцию по уборке вдоль запланированного пути без отклонений, вся область может быть убрана полностью.
Вышеописанный вариант выполнения настоящего изобретения и достигнутые с его помощью преимущества служат просто примером и не должны рассматриваться как ограничения настоящего изобретения. Настоящее изобретение может быть легко применено к другим типам устройств. Кроме того, описание вариантов выполнения настоящего изобретения служит лишь иллюстрацией, а не ограничивает объем изобретения, сформулированный в формуле изобретения, в то время как для специалистов в данной области техники будут очевидны различные варианты, изменения и модификации настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ УГЛОВОЙ КООРДИНАТЫ РОБОТА- УБОРЩИКА (ВАРИАНТЫ) | 2003 |
|
RU2251137C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| РОБОТ-УБОРЩИК И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2006 |
|
RU2313269C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2005 |
|
RU2293647C1 |
Изобретение относится к робототехнике. Технический результат - повышение точности позиционирования робота-уборщика. Способ коррекции координат робота-уборщика с использованием датчика угла поворота используется для коррекции координат робота-уборщика относительно абсолютных координат станции подзарядки с целью улучшения следования роботом-уборщиком вдоль пути перемещения. Робот-уборщик находится в ждущем режиме у станции подзарядки и перемещается в рабочую область для выполнения заданной работы. Робот-уборщик прерывает заданную работу после того, как определяет, что накопленный угол поворота превысил заданное значение, и возвращается к станции подзарядки. Текущие координаты робота-уборщика корректируются по базовым координатам станции подзарядки. Робот-уборщик перемещается в предыдущую точку, в которой он находился перед возвращением к станции подзарядки, и возобновляет работу с того места, в котором он ее прервал. 3 н. и 11 з.п. ф-лы, 7 ил.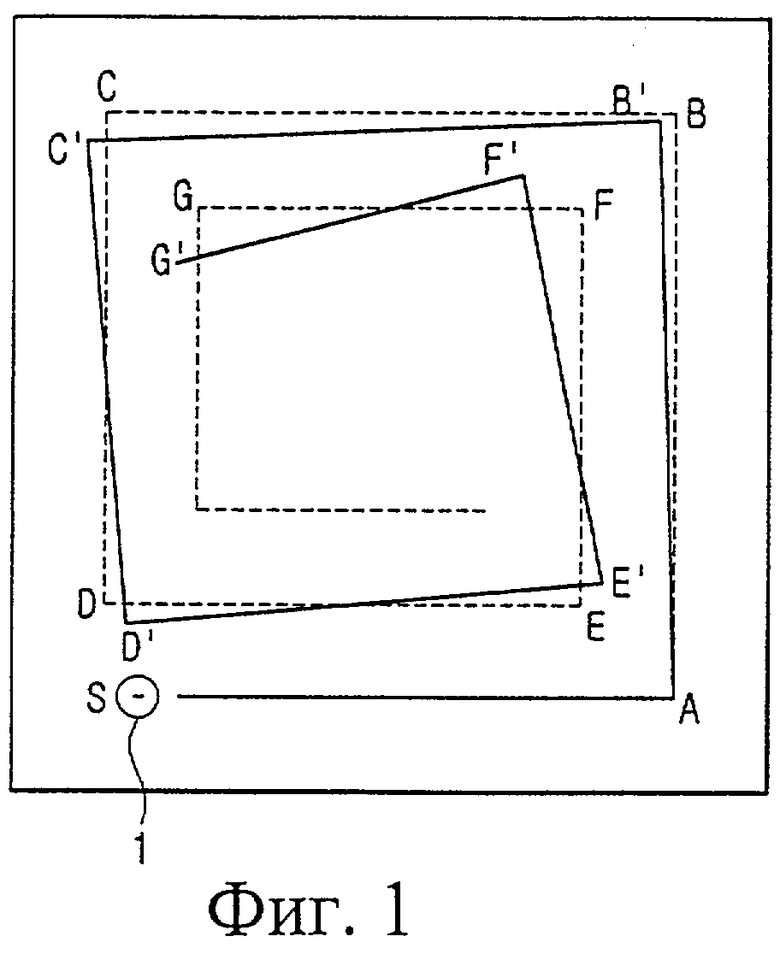
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 A, 04.08.1998 | |||
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

