Изобретение относится к средствам подводной навигации, в частности к определению местоположения или для точной координатной привязки автономных необитаемых подводных аппаратов и других подводных технических средств, оснащенных источниками гидроакустических сигналов в глубоководных районах океана.
Известен способ использования навигационной гидроакустической системы группой автономных подводных аппаратов, основанный на определении места автономного подводного аппарата относительно точки на дне моря, обозначенной тремя или более донными гидроакустическими маяками навигационной гидроакустической системы, в котором путем измерения на борту подводного аппарата разностей моментов времени приема акустических сигналов, синхронно излучаемых маяками навигационной гидроакустической системы, работающей по непрерывной программе, определяются разности расстояний до маяков. Место подводного аппарата находится как точка пересечения гиперболоидов вращения, в фокусах которых находятся маяки (см. Бородин В.И., Смирнов Г.Е., Толстякова Н.А., Яковлев Г.В. Гидроакустические навигационные средства / В.И. Бородин. - Л.: Судостроение, 1983. - стр. 262).
Недостатком способа является необходимость установки стационарных гидроакустических маяков, что затрудняет использование системы в новом позиционном районе, так как требуется значительное время на ее развертывание. Кроме того, излучение акустических сигналов по непрерывной программе, без запроса, приводит к существенному сокращению срока службы маяков из-за нерационального расходования их энергоресурса, что вызывает сокращение срока работы навигационной гидроакустической системы. Также из-за нестабильности работы опорных генераторов и возникающих погрешностей формирования интервалов времени в маяках нарушается синхронность излучения акустических сигналов маяками, что увеличивает погрешности определения места автономного подводного аппарата и вызывает сокращение срока работы навигационной гидроакустической системы.
Известен «Способ и устройство освещения подводной обстановки» (пат. RU №2655592, опубл. 28.05.2018, МПК: В63С 11/48), при котором производят поиск подводных объектов автономным необитаемым подводным аппаратом, оснащенным системой обнаружения цели при его движении по заданному маршруту. В качестве автономного необитаемого подводного аппарата применяют подводный аппарат с переменной плавучестью - глайдер, оснащают его гибкой протяженной буксируемой антенной для поиска подводных объектов. Управление глайдером осуществляют по программе бортового процессора с использованием системы курсоуказания, считывающего устройства, глубиномера, кренометра и дифферентометра. Каждые 2-3 часа производят всплытие глайдера в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы, антенные устройства которых установлены на вертикальном стабилизаторе.
Недостатком способа является меньшая точность определения координат обнаруженных подводных объектов по сравнению с использованием системы гидроакустических маяков, так как при определении координат подводных объектов используется лишь один подводный аппарат с переменной плавучестью и накапливается ошибка счисления при перемещении глайдера.
Известен также способ использования навигационной гидроакустической системы группой автономных подводных аппаратов (см. Навигационная гидроакустическая система СНП-10. - Записки по гидрографии, №216, 1986, стр. 59-63), принимаемый за прототип, включающий определение места автономного подводного аппарата, относительно точки на дне моря, обозначенной донными гидроакустическими маяками-ответчиками навигационной гидроакустической системы, в котором путем измерения времени распространения акустического сигнала от подводного аппарата до маяков-ответчиков навигационной гидроакустической системы и обратно определяются расстояния до маяков-ответчиков. Место аппарата находится как точка пересечения сфер, центры которых расположены в точках установки маяков-ответчиков, а радиусы равны наклонным расстояниям от маяков-ответчиков до подводного аппарата.
Недостатком способа является необходимость установки стационарных гидроакустических маяков-ответчиков, что затрудняет использование системы в новом позиционном районе, так как требуется значительное время на ее развертывание.
Задачей изобретения является разработка нового способа определения координат подводных объектов по гидроакустическому каналу, который позволяет устранить недостатки прототипа и обеспечить определение координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе.
Технический результат изобретения заключается в уменьшении времени на развертывание навигационной гидроакустической системы в новом позиционном районе для определения координат подводных объектов по гидроакустическому каналу.
Точность определения координат подводных объектов увеличивается за счет увеличения числа подводных глайдеров, оборудованных гидроакустическими ответчиками.
Сущность изобретения заключается в том, что предлагаемый способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу включает измерение времени распространения акустического сигнала от подводного объекта до гидроакустических ответчиков навигационной гидроакустической системы и обратно для определения расстояний до гидроакустических ответчиков.
Причем место подводного объекта находят как точку пересечения сфер, центры которых расположены в точках расположения гидроакустических ответчиков, а радиусы равны наклонным расстояниям от гидроакустических ответчиков до подводного объекта. Заметим, что использование такого подхода для задач определения координат описано, например, в [1] или [2].
В предлагаемом способе гидроакустические ответчики располагают на нескольких подводных глайдерах, которые для определения своих координат периодически производят всплытие в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы.
Существенность отличий предлагаемого способа от прототипа определяется следующим.
Размещение гидроакустических ответчиков на подводных глайдерах вместо стационарных гидроакустических маяков-ответчиков позволяет устранить недостатки прототипа, обеспечить определение координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе.
Таким образом, совокупность указанных существенных признаков позволяет обеспечить достижение нового технического результата, а именно обеспечить точное определение координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе.
Сущность способа определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу поясняется чертежом, где
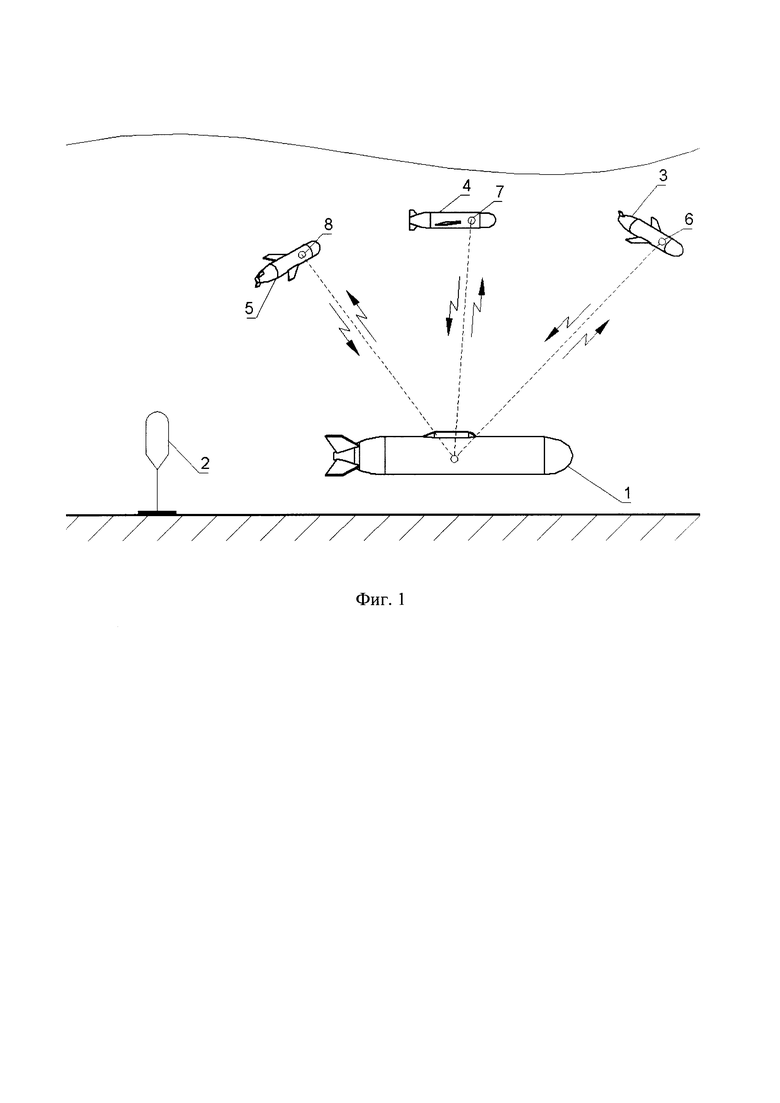
на фиг. 1 - схема, отражающая способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу.
Для определения координат подводного объекта - автономного необитаемого подводного аппарата сверхглубокого погружения 1 и гидроакустической донной станции связи и навигации 2 по гидроакустическому каналу используют подводные глайдеры 3, 4, 5, оборудованные гидроакустическими ответчиками 6, 7, 8. Измеряют время распространения акустического сигнала от автономного необитаемого подводного аппарата сверхглубокого погружения 1 или гидроакустической донной станции связи и навигации 2 до гидроакустических ответчиков 6, 7, 8 навигационной гидроакустической системы и обратно для определения расстояний до гидроакустических ответчиков.
Место подводного объекта находится как точка пересечения сфер, центры которых расположены в точках расположения гидроакустических ответчиков 6, 7, 8, а радиусы равны наклонным расстояниям от гидроакустических ответчиков 6, 7, 8 до автономного необитаемого подводного аппарата сверхглубокого погружения 1 или гидроакустической донной станции связи и навигации 2. Для определения координат подводные глайдеры 3, 4, 5 периодически производят всплытие в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы.
Заявителем были проведены исследования рассматриваемого технического решения «Способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу», направленные на обеспечение точного определения координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе.
Анализ полученных данных показал, что снижается время развертывания гидроакустической системы по сравнению с системой, имеющей в своем составе стационарные гидроакустические маяки-ответчики.
Таким образом, технический результат изобретения заключается в обеспечении точного определения координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе.
Источники информации
1. Шабанов Э.В., Гиниятуллин В.М. Дифференциальная гиперболическая трилатерация. // Электротехнические и информационные комплексы и системы. №2, т. 15, 2019. С. 63-69.
2. Андреев Р.А., Остроумов С.И., Федоров А.С. Методы позиционирования в сетях WI-FI. // Экономика и качество систем связи, 2021. №3. Стр. 50-63.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к средствам подводной навигации, в частности к определению местоположения или для точной координатной привязки автономных необитаемых подводных аппаратов и других подводных технических средств, оснащенных источниками гидроакустических сигналов в глубоководных районах океана. Сущность: способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу включает измерение времени распространения акустического сигнала от подводного объекта до гидроакустических ответчиков навигационной гидроакустической системы и обратно для определения расстояний до гидроакустических ответчиков. Место подводного объекта находят как точку пересечения сфер, центры которых расположены в точках расположения гидроакустических ответчиков, а радиусы равны наклонным расстояниям от гидроакустических ответчиков до подводного объекта. При этом гидроакустические ответчики располагают на подводных глайдерах, которые для определения координат периодически производят всплытие в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы. Технический результат: обеспечивается точное определение координат подводных объектов без значительных временных затрат на развертывание гидроакустической навигационной системы в новом позиционном районе. 1 ил.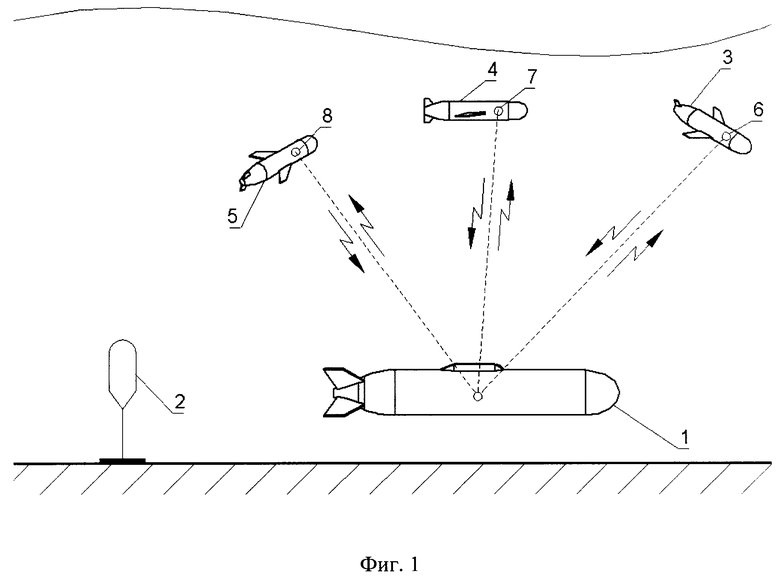
Способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения - подводного объекта и гидроакустической донной станции связи и навигации по гидроакустическому каналу, включающий измерение времени распространения акустического сигнала от подводного объекта до гидроакустических ответчиков навигационной гидроакустической системы и обратно для определения расстояний до гидроакустических ответчиков, отличающийся тем, что гидроакустические ответчики располагают на подводных глайдерах, которые для определения своих координат периодически производят всплытие в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| US 11305854 B2, 19.04.2022 | |||
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море | 2018 |
|
RU2687886C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| CN 108344403 A, 31.07.2018 | |||
| CN 110121662 A, 13.08.2019 | |||
| CN 111366962 A, 03.07.2020 | |||
| CN 105644742 A, 08.06.2016. | |||

