Настоящая заявка претендует на приоритет заявки на выдачу патента Китая No. 201910249922.9, которая подана в Национальную администрацию по интеллектуальной собственности Китая 29 марта 2019 г. под названием «МЕХАНИЗМ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ, МОБИЛЬНЫЙ ТЕРМИНАЛ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ» ("POSITION DETECTION MECHANISM, MOBILE TERMINAL, AND СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ") и которая включена сюда посредством ссылки во всей своей полноте.
Область техники, к которой относится изобретение
Настоящая заявка относится к области технологий связи, и в частности, к механизму определения положения, мобильному терминалу и способу определения положения в средстве связи.
Уровень техники
По мере развития и в ходе прогресса науки и технологии широко использовались механизмы для определения положения (например, корпусы для определения положения выдвижных видеокамер и корпусы для определения положения выдвижных гастроскопических зондов). Например, выдвижная видеокамера может быть использована в мобильном терминале для решения той проблемы, что передняя видеокамера занимает область дисплея. Выдвижной корпус видеокамеры может содержать видеокамерное устройство и двигатель для приведения этого видеокамерного устройства в движение. Это выдвижное видеокамерное устройство может выдвигаться из мобильного терминала, когда требуется произвести съемку, и втягивается в соответствующее пространство внутри терминала для размещения видеокамерного устройства, когда съемка не нужна.
Однако в текущий момент промышленность преследует цель разработки способов того, как точно определить положение видеокамерного устройства (иными словами, положение телескопического механизма и состояние этого телескопического механизма видеокамеры) для обеспечения лучших условий и качества видеосъемки и защиты видеокамерного устройства.
Раскрытие сущности изобретения
Варианты настоящего изобретения описывают механизм определения положения, мобильный терминал и способ определения положения, которые могут повысить точность определения.
Согласно первому аспекту, один из вариантов настоящей заявки предлагает механизм определения положения, содержащий: первый корпус; второй корпус, который пространственно отделен от первого корпуса и может перемещаться относительно первого корпуса; первый магнит, установленный на втором корпусе; и датчик Холла, который установлен на первом корпусе и содержит первую рабочую поверхность и вторую рабочую поверхность, соответственно протяженные в разных направлениях, где этот датчик Холла воспринимает магнитное поле первого магнита через первую рабочую поверхность и генерирует первый индукционный сигнал, а также этот датчик Холла воспринимает магнитное поле первого магнита через вторую рабочую поверхность и генерирует второй индукционный сигнал; эти первый индукционный сигнал и второй индукционный сигнал используются для определения пространственного состояния второго корпуса. Пространственное состояние второго корпуса представляет собой первое пространственное состояние, в котором второй корпус движется к первой заданной позиции в первом направлении, или второе пространственное состояние, в котором второй корпус движется ко второй заданной позиции во втором направлении. Второе направление противоположно первому направлению.
Под рабочей поверхностью здесь понимают поверхность датчика Холла, воспринимающую магнитное поле. В механизме для определения положения, описываемом в этом варианте настоящей заявки, поскольку датчик Холла содержит первую рабочую поверхность и вторую рабочую поверхность, этот датчик Холла может воспринимать магнитное поле первого магнита через первую рабочую поверхность и генерировать первый индукционный сигнал, а также датчик Холла воспринимает магнитное поле первого магнита через вторую рабочую поверхность и генерирует второй индукционный сигнал так, что когда второй корпус движется относительно первого корпуса, пространственное состояние второго корпуса может быть определено на основе указанных двух индукционных сигналов (первого индукционного сигнала и второго индукционного сигнала) с выхода датчика Холла. Иными словами, пространственное состояние второго корпуса определяют только тогда, когда оба эти сигнала удовлетворяют некоторому условию, повышая тем самым точность определения.
Для восприятия магнитного поля, генерируемого первым магнитом, в больших пределах и для дальнейшего повышения точности определения, направления перемещения первой рабочей поверхности и второго корпуса по существу перпендикулярны одно другому. Вторая рабочая поверхность по существу перпендикулярна первой рабочей поверхности, и при этом первая рабочая поверхность и вторая рабочая поверхность по существу перпендикулярны поверхности первого корпуса, на которой установлен датчик Холла. Термин «приблизительно перпендикулярно» можно интерпретировать как вертикально, приблизительно вертикально или расположенный под конкретным заданным углом.
В некоторых вариантах, чтобы иметь возможность обнаруживать помехи от внешних магнитных полей, датчик Холла дополнительно содержит третью рабочую поверхность, направление протяженности которой отличается от направлений протяженности обеих поверхностей – первой рабочей поверхности и второй рабочей поверхности. Датчик Холла воспринимает магнитное поле первого магнита и/или внешнее магнитное поле через третью рабочую поверхность и генерирует третий индукционный сигнал. Этот третий индукционный сигнал используется для определения, создает ли внешнее магнитное поле помехи механизму для определения положения. Внешнее магнитное поле представляет собой магнитное поле, генерируемое каким-либо объектом, отличным от первого магнита и второго магнита, описываемых ниже.
Когда нет внешнего магнитного поля, третий индукционный сигнал, генерируемый датчиком Холла, не меняется; а когда внешнее магнитное поле присутствует, третий индукционный сигнал, генерируемый датчиком Холла, изменяется. В качестве альтернативы, когда внешнего магнитного поля нет, третий индукционный сигнал, генерируемый датчиком Холла, равен 0; а когда внешнее магнитное поле присутствует, третий индукционный сигнал, генерируемый датчиком Холла, не равен 0.
В одном из вариантов, для уменьшения помех со стороны существующего магнитного поля и повышения точности восприятия внешнего магнитного поля третья рабочая поверхность по существу перпендикулярна первой рабочей поверхности и второй рабочей поверхности по отдельности.
Для повышения точности определения пространственного состояния второго корпуса, механизм для определения положения дополнительно содержит второй магнит. Второй магнит и первый магнит расположены на расстоянии один от другого на втором корпусе. Датчик Холла воспринимает магнитное поле первого магнита и/или второго магнита через первую рабочую поверхность и генерирует первый индукционный сигнал, и далее этот датчик Холла воспринимает магнитное поле первого магнита и/или второго магнита через вторую рабочую поверхность и генерирует второй индукционный сигнал. В этом варианте, поскольку первый индукционный сигнал и второй индукционный сигнал генерируют посредством восприятия по меньшей мере одного из двух магнитов, когда второй корпус движется, первый индукционный сигнал и второй индукционный сигнал имеют относительно высокую скорость изменения. Далее, положение движущегося второго корпуса может быть определено на основе разных первых индукционных сигналов и вторых индукционных сигналов, повышая тем самым точность определения пространственного состояния второго корпуса.
Когда второй корпус движется относительно первого корпуса, первый магнит и второй магнит движутся относительно датчика Холла. Однако независимо от положения, к которому второй корпус движется относительно первого корпуса, датчик Холла всегда располагается в пределах областей действия магнитных полей, генерируемых первым магнитом и вторым магнитом, чтобы обеспечить стабильность генерации первого индукционного сигнала и второго индукционного сигнала датчиком Холла.
В одном из вариантов, магнитное поле, генерируемое первым магнитом, и магнитное поле, генерируемое вторым магнитом, по меньшей мере частично накладываются одно на другое, так что когда второй корпус движется относительно первого корпуса, магнитный поток, воспринимаемый первой рабочей поверхностью и второй рабочей поверхностью, сильно изменяется. Это может повысить чувствительность датчика Холла для восприятия магнитного поля, улучшая тем самым точность определения состояния первого корпуса.
В этом варианте, оба магнита – и первый магнит и второй магнит, являются стержневыми магнитами, что способствует лучшему контролю в процессе производства и повышает защищенность от неосторожного обращения («защиту от дурака»). В другом варианте, первый магнит и второй магнит могут, в качестве альтернативы, быть цилиндрическими магнитами полукруглого поперечного сечения.
В одном из вариантов, для обеспечения должного взаимного расположения между датчиком Холла, а также первым магнитом и вторым магнитом, когда второй корпус движется, и также обеспечения, чтобы датчик Холла мог воспринимать магнитные поля, генерируемые первым магнитом и вторым магнитом, соединительная прямая между центральной точкой первого магнита и центральной точкой второго магнита по существу параллельна направлению перемещения второго корпуса. Центральной точкой называется центр тяжести элемента. Когда элемент представляет собой объект регулярной формы, центральная точка этого элемента является геометрическим центром этого регулярного объекта. Слова «по существу параллельна» можно интерпретировать как параллельна, приблизительно параллельна или образует конкретный предварительно заданный угол.В одном из вариантов, ось север-юг первого магнита и ось север-юг второго магнита по существу параллельны направлению перемещения второго корпуса по отдельности, так что во время перемещения второго корпуса, датчик Холла может воспринимать накладывающиеся одно на другое магнитные поля, генерируемые первым магнитом и вторым магнитом.
В дополнение к этому, для обеспечения чувствительности датчика Холла и обеспечения того, чтобы скорость изменения магнитного потока, проходящего сквозь первую рабочую поверхность и вторую рабочую поверхность, удовлетворяет конкретным требованиям, смежные концы первого магнита и второго магнита имеют одинаковую полярность. В одном из вариантов, эти имеющие одинаковую полярность (одноименные полюса) являются N-полюсами. Ось север-юг является вектором магнита от N-полюса к S-полюсу, иными словами, направлением магнитного полюса. Наиболее сильно намагниченная часть магнита называется магнитным полюсом. Магнит, который может свободно поворачиваться в горизонтальной плоскости, всегда имеет один магнитный полюс, указывающий на юг, и другой полюс, указывающий на север, когда магнит остается неподвижным. Магнитный полюс, указывающий на юг, называется южным полюсом (S-полюс), и магнитный полюс, указывающий на север, называется северным полюсом (N-полюс).
Согласно второму аспекту, один из вариантов настоящей заявки предлагает мобильный терминал, содержащий экран дисплея, корпус и видеокамерное устройство. Экран дисплея установлен на корпусе. Корпус имеет отверстие и сообщающееся с этим отверстием внутреннее пространство для помещения в нее видеокамерного устройства. Мобильный терминал содержит механизм для определения положения, расположенный во внутреннем пространстве терминала. Этот механизм для определения положения содержит печатную плату, кронштейн, первый магнит и датчик Холла. Видеокамерное устройство содержит видеокамеру и приводной узел. Видеокамера установлена на кронштейне, а приводной узел соединен с этим кронштейном для приведения кронштейна в движение с целью перемещения видеокамеры для выдвижения видеокамеры из корпуса и отведения ее назад внутрь корпуса. Датчик Холла содержит первую рабочую поверхность и вторую рабочую поверхность, соответственно протяженные в разных направлениях. Датчик Холла воспринимает магнитное поле первого магнита через первую рабочую поверхность и генерирует первый индукционный сигнал, и далее датчик Холла воспринимает магнитное поле первого магнита через вторую рабочую поверхность и генерирует второй индукционный сигнал. Эти первый индукционный сигнал и второй индукционный сигнал используются для определения пространственного состояния видеокамеры. Совокупность пространственных состояний видеокамеры содержит отведенную назад позицию и выдвинутую вперед позицию.
Поскольку мобильный терминал, предлагаемый в этом варианте настоящей заявки, содержит механизм для определения положения согласно приведенному выше варианту, и видеокамера установлена на кронштейне, пространственное состояние видеокамеры может быть определено с использованием первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла, чтобы повысить точность определения пространственного состояния видеокамеры.
В одном из вариантов, приводной узел содержит ведущий элемент, адаптер и ходовой винт. Один конец адаптера жестко соединен с кронштейном, а другой конец адаптера имеет поворотное соединение с ходовым винтом. Ходовой винт далее имеет поворотное соединение с ведущим элементом. Ведущий элемент может приводить ходовой винт во вращение, так что адаптер вызывает перемещение кронштейна и выдвижение видеокамеры из внутреннего пространства корпуса терминала или отведение ее назад внутрь корпуса через указанное отверстие. В этом варианте, ходовой винт конфигурирован для приведения кронштейна в движение, тем самым эффективно повышая точность перемещения кронштейн и увеличивая надежность работы мобильного терминала.
В одном из вариантов, датчик Холла расположен на стороне печатной платы, обращенной к экрану дисплея, и видеокамера расположена на стороне кронштейна, обращенной к экрану дисплея. Направления перемещения первой рабочей поверхности и кронштейна являются по существу взаимно перпендикулярными. Вторая рабочая поверхность и первая рабочая поверхность по существу перпендикулярны одна другой, и обе эти поверхности – первая рабочая поверхность и вторая рабочая поверхность, по существу перпендикулярны поверхности печатной платы, обращенной к экрану дисплея.
В одном из вариантов, датчик Холла дополнительно содержит третью рабочую поверхность, направление протяженности которой отличается от направлений протяженности обеих поверхностей – первой рабочей поверхности и второй рабочей поверхности. Датчик Холла воспринимает магнитное поле первого магнита и/или внешнее магнитное поле через третью рабочую поверхность и генерирует третий индукционный сигнал. Этот третий индукционный сигнал используется для определения, находится ли мобильный терминал под влиянием помех от внешнего магнитного поля.
В одном из вариантов, третья рабочая поверхность по существу параллельна поверхности печатной платы, обращенной к экрану дисплея.
В дополнение к этому, механизм для определения положения в мобильном терминале может в качестве альтернативы представлять собой механизм для определения положения в любом одном из приведенных выше вариантов первого аспекта
Для управления приводным узлом на основе первого индукционного сигнала и второго индукционного сигнала, генерируемого датчиком Холла, в некоторых вариантах, мобильный терминал дополнительно содержит процессор. Этот процессор электрически соединен с приводным узлом и датчиком Холла. Когда будет принята операция инициирования, введенная пользователем, процессор запускает приводной узел в работу для приведения кронштейна в движение с целью перемещения видеокамеры для выдвижения ее из корпуса и отведения назад внутрь корпуса через указанное отверстие. Процессор далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла, и определяет пространственное состояние видеокамеры на основе полученных первого индукционного сигнала и второго индукционного сигнала.
Состояние видеокамеры может представлять собой: отведенную назад позицию, выдвинутую вперед позицию, процедуру отведения назад или процедуру выдвижения вперед. Термин «отведенная назад позиция» означает здесь, что видеокамера располагается во внутреннем пространстве корпуса мобильного терминала. Термин «выдвинутая вперед позиция» означает здесь, что видеокамера выдвинута вперед из внутреннего пространства корпуса мобильного терминала и располагается вне этого внутреннего пространства. Термин «процедура отведения назад» означает здесь процедуру, в ходе которой камера отходит назад извне во внутреннее пространство корпуса. Термин «процедура выдвижения вперед» означает здесь процедуру, в ходе которой видеокамера выдвигается из внутреннего пространства корпуса наружу.
Для повышения точности определения состояния видеокамеры мобильный терминал предварительно программируют опорным сигналом. При таком подходе, состояние камеры может быть точно определено путем сравнения первого индукционного сигнала и второго индукционного сигнала с предварительно заданным опорным сигналом. Поэтому, в некоторых вариантах, процедура, в ходе которой процессор получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла, и определяет состояние видеокамеры на основе полученных первого индукционного сигнала и второго индукционного сигнала, содержит: процессор получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла, и определяет, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом и разность между вторым индукционным сигналом и вторым опорным сигналом. Эти первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в выдвинутой вперед позиции. В качестве альтернативы, первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции. Процессор далее определяет, является ли абсолютная величина разности меньше заданной пороговой величины. Когда абсолютная величина указанной разности меньше заданной пороговой величины, процессор определяет, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции. Когда первый индукционный сигнал и второй индукционный сигнал изменяются непрерывно, процессор определяет, что видеокамера находится в процессе выдвижения вперед или в процессе отведения назад.
Чтобы избежать присутствия магнитного поля в процессе определения положения видеокамеры и избежать отрицательного влияния на точность определения, в некоторых вариантах, когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор далее получает третий индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла, и вычисляет разность между полученным третьим индукционный сигнал и стационарным сигналом. Процессор далее определяет, является ли абсолютная величина этой разности больше опорной пороговой величины. Процессор соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом, и разность между вторым индукционным сигналом и вторым опорным сигналом только тогда, когда абсолютная величина разности не больше указанной опорной пороговой величины. Таким способом можно исключить влияние внешнего магнитного поля на точность вычислений.
Указанный стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, в которой мобильный терминал не подвергается воздействию внешнего магнитного поля.
Когда присутствует помеха от внешнего магнитного поля, появляется ошибка в определении положения видеокамеры, так что такое определение положения не имеет смысла. Поэтому, в одном из вариантов, когда величина изменения третьего индукционного сигнала по сравнению со стационарным сигналом больше указанной опорной пороговой величины, мобильным терминалом управляют для передачи информации подсказки, чтобы подсказать пользователю, что следует оставаться подальше от внешнего магнитного поля.
В одном из вариантов, для точного определения, находится ли видеокамера в выдвинутой вперед позиции, введенная пользователем команда пусковой операции представляет собой операцию инициирования для начала работы видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для выдвинутой вперед позиции, и второй опорный сигнал представляет собой второй опорный сигнал для выдвинутой вперед позиции; и указанная заданная пороговая величина является первой заданной пороговой величиной. Первый опорный сигнал для выдвинутой вперед позиции и второй опорный сигнал для выдвинутой вперед позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в выдвинутой вперед позиции. Когда принята введенная пользователем операция инициирования для начала работы видеокамеры, процессор управляет приводным узлом для запуска его в работу, чтобы привести второй корпус в движение в первом направлении, так что видеокамера находится в процедуре выдвижения вперед. Процессор далее получает первый индукционный сигнал и второй индукционный сигнал, передаваемые датчиком Холла, когда видеокамера находится в процедуре выдвижения вперед, и определяет, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разность между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции. Процессор далее определяет, является ли абсолютная величина указанной разности меньше первой заданной пороговой величины. Когда абсолютная величина указанной разности меньше первой заданной пороговой величины, процессор определяет, что видеокамера находится в выдвинутой вперед позиции.
В дополнение к этому, для точного определения, находится ли видеокамера в отведенной назад позиции, введенная пользователем команда пусковой операции далее представляет собой операцию инициирования для выключения видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал отведенной назад позиции, и второй опорный сигнал представляет собой второй опорный сигнал отведенной назад позиции; и заданная опорная величина представляет собой вторую заданную пороговую величину. Первый опорный сигнал отведенной назад позиции и второй опорный сигнал отведенной назад позиции являются соответственно индукционными сигналами, генерируемыми первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции. Когда принята введенная пользователем операция инициирования для выключения видеокамеры, процессор управляет приводным узлом для запуска его в работу, чтобы привести второй корпус в движение во втором направлении, так что видеокамера находится в процедуре отведения назад. Процессор далее получает первый индукционный сигнал и второй индукционный сигнал, передаваемые датчиком Холла, когда видеокамера находится в процедуре отведения назад, и определяет, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом для отведенной назад позиции и разность между вторым индукционным сигналом и вторым опорным сигналом для отведенной назад позиции. Процессор далее определяет, является ли абсолютная величина указанной разности меньше второй заданной пороговой величины. Когда абсолютная величина указанной разности меньше второй заданной пороговой величины, процессор определяет, что видеокамера находится в выдвинутой вперед позиции.
Когда абсолютная величина указанной разности не меньше первой заданной пороговой величины, это означает, что видеокамера не полностью выдвинулась вперед из корпуса. В этом случае возможная причина состоит в торможении кронштейна во время движения, например, сопротивление движению кронштейна больше движущей силы, создаваемой ведущим элементом, и вследствие этого кронштейн останавливается во время движения. Другая возможная причина состоит в том, что конкретная конструкция мобильного терминала неисправна. В этом случае, если ведущий элемент продолжит работу, приводной узел и кронштейн могут быть повреждены. Поэтому, чтобы избежать этой ситуации, в некоторых вариантах, процессор управляет приводным узлом для продолжения работы, таким образом, чтобы кронштейн продолжал перемещение в первом направлении, и определяет, оказалась ли видеокамера в выдвинутой вперед позиции. Когда видеокамера все еще не дошла до выдвинутой вперед позиции, процессор управляет приводным узлом для приведения кронштейна в движение во втором направлении, чтобы отвести видеокамеру внутрь корпуса, защищая тем самым кронштейн и приводной узел.
Аналогично, когда абсолютная величина разности не меньше второй заданной пороговой величины, процессор управляет приводным узлом для продолжения работы таким образом, чтобы кронштейн продолжал перемещение во втором направлении, и определяет, пришла ли видеокамера в отведенную назад позицию. Когда видеокамера все еще не находится в отведенной назад позиции, процессор управляет приводным узлом для остановки работы.
Когда определено, что видеокамера находится в выдвинутой вперед позиции, если процессор не принял операцию инициирования от пользователя для выключения видеокамеры, видеокамера всегда должна находиться в выдвинутой вперед позиции, иными словами, кронштейн находится в первой заданной позиции и не двигается. Однако, когда на видеокамеру воздействует внешнее давление, например, когда пользователь хочет нажать на видеокамеру рукой, чтобы заставить видеокамеру отойти назад внутрь корпуса, если ведущий элемент по-прежнему не работает в этом случае, это влияет на срок службы ведущего элемента, или даже этот ведущий элемент оказывается поврежден. Поэтому, чтобы избежать такой ситуации, в некоторых вариантах, когда определено, что видеокамера находится в выдвинутой вперед позиции, процессор далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла, когда видеокамера находится в выдвинутой вперед позиции, и определяет, изменяются ли эти первый индукционный сигнал и второй индукционный сигнал. Когда первый индукционный сигнал и второй индукционный сигнал изменяются, процессор определяет, является ли величина этого изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины. Когда величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины, процессор управляет приводным узлом для приведения кронштейна в движение во втором направлении, так что видеокамера отводится назад внутрь корпуса.
Однако такое изменение первого индукционного сигнала и второго индукционного сигнала может не быть вызвано перемещением кронштейна под воздействием внешнего давления на видеокамеру. Вполне возможно, что существуют помехи со стороны внешнего магнитного поля. Поэтому, когда видеокамера находится в выдвинутой вперед позиции, а также первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла изменяются, тогда необходимо определить, присутствуют ли помехи со стороны внешнего магнитного поля, чтобы избежать неправильного определения и далее избежать нежелательного влияния на действия и впечатления пользователя. Например, если пользователь использует видеокамеру для фотосъемки, в этом случае, если будет определено, что первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла изменяются, и что видеокамерой управляют для ее отведения назад внутрь корпуса, тогда фотографирование пользователя прерывается, что приводит к неудобствам для пользователя.
Поэтому, в некоторых вариантах, прежде чем процессор будет управлять приводным узлом для работы таким образом, чтобы кронштейн перемещался во втором направлении, так что видеокамера отходит назад внутрь корпуса, процессор далее получает третий индукционный сигнал, передаваемый датчиком Холла, когда видеокамера находится в выдвинутой вперед позиции, и вычисляет разницу между полученным третьим индукционным сигналом и стационарным сигналом. Этот стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, в которой мобильный терминал не подвергается воздействия внешнего магнитного поля. Процессор далее определяет, является ли абсолютная величина разности больше четвертой заданной пороговой величины. Когда абсолютная величина разности не больше четвертой заданной пороговой величины, процессор управляет приводным узлом с целью приведения кронштейна в движение для перемещения во втором направлении, так что видеокамера отводится назад внутрь корпуса.
В одном из вариантов, когда абсолютная величина разности больше четвертой заданной пороговой величины, процессор далее управляет мобильным терминалом для передачи информации подсказки, чтобы подсказать пользователю, что следует оставаться подальше от внешнего магнитного поля.
В дополнение к этому, когда определено, что видеокамера успешно выдвинулась вперед и находится в выдвинутой вперед позиции, или что видеокамера успешно отведена назад и находится в отведенной назад позиции внутри корпуса, тогда процессор по отдельности записывает число раз, когда видеокамера была успешно выведена вперед или успешно отведена назад, чтобы обозначить текущее состояние видеокамеры.
Согласно третьему аспекту, один из вариантов настоящей заявки предлагает способ определения положения, который применяется к мобильному терминалу. Этот мобильный терминал содержит корпус, печатную плату, кронштейн и видеокамерное устройство. Печатная плата, кронштейн и видеокамерное устройство расположены внутри корпуса. Корпус имеет отверстие и сообщающееся с этим отверстием внутреннее пространство для расположения в нем видеокамерного устройства. Это видеокамерное устройство содержит видеокамеру и приводной узел, видеокамера установлена на кронштейн, и приводной узел соединен с кронштейном. На печатной плате смонтирован датчик Холла, а на кронштейне установлен первый магнит. Этот способ определения положения содержит: когда принята введенная пользователем операция инициирования, управление приводным узлом для приведения кронштейна в движение и перемещения его в заданном направлении; получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла, где первый индукционный сигнал генерируют в результате восприятия магнитного поля первого магнита посредством первой рабочей поверхности датчика Холла, и второй индукционный сигнал генерируют в результате восприятия магнитного поля первого магнита посредством второй рабочей поверхности датчика Холла; и определение пространственного состояния видеокамеры на основе первого индукционного сигнала и второго индукционного сигнала, где пространственное состояние видеокамеры может представлять собой выдвинутую вперед позицию или отведенную назад позицию.
В некоторых вариантах, процедура определения пространственного состояния видеокамеры на основе полученных первого индукционного сигнала и второго индукционного сигнала содержит: определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно; когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом, и разности между вторым индукционным сигналом и вторым опорным сигналом, где первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в выдвинутой вперед позиции; в качестве альтернативы, первый опорный сигнал и второй опорный сигнал представляют собой соответственно первые индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции; и определение, является ли абсолютная величина разности меньше заданной пороговой величины; когда абсолютная величина разности меньше заданной пороговой величины, определение, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции.
В некоторых вариантах, когда первый индукционный сигнал и второй индукционный сигнал изменяются непрерывно, определяют, что видеокамера находится в процедуре выдвижения вперед и перемещается в выдвинутую вперед позицию; или определяют, что видеокамера находится в процедуре отведения назад и движется в отведенную назад позицию.
В одном из вариантов, до этапа «соответствующего вычисления разности между первым индукционным сигналом и первым опорным сигналом, и разности между вторым индукционным сигналом и вторым опорным сигналом», способ определения положения дополнительно содержит: вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом, где этот третий индукционный сигнал генерируют в результате восприятия магнитного поля первого магнита посредством третьей рабочей поверхности датчика Холла, и стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, в которой мобильный терминал не подвергается воздействию внешнего магнитного поля; и определение, является ли абсолютная величина разности больше опорной пороговой величины; когда абсолютная величина разности не больше опорной пороговой величины, соответственно, вычисление разности между первым индукционным сигналом и первым опорным сигналом, и разности между вторым индукционным сигналом и вторым опорным сигналом.
В одном из вариантов, когда указанная разность больше опорной пороговой величины, мобильным терминалом управляют для передачи информации подсказки.
В одном из вариантов, введенная пользователем операция инициирования представляет собой операцию инициирования для начала работы видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для выдвинутой вперед позиции, и второй опорный сигнал представляет собой второй опорный сигнал для выдвинутой вперед позиции; и заданная пороговая величина представляет собой первую заданную пороговую величину. Эти первый опорный сигнал для выдвинутой вперед позиции и второй опорный сигнал для выдвинутой вперед позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в выдвинутой вперед позиции. Процедура управления, когда принята операция инициирования от пользователя, приводным узлом для приведения кронштейна в движение с целью перемещения его в заданном направлении содержит: когда принята введенная пользователем операция инициирования для начала работы видеокамеры, управление приводным узлом для приведения кронштейна в движение с целью перемещения его в первом направлении. Соответственно, процедура вычисления разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным сигналом содержит: соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции. Процедура определения, является ли абсолютная величина разности меньше заданной пороговой величины, содержит: определение, является ли абсолютная величина разности меньше первой заданной пороговой величины. Процедура определения, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции, когда абсолютная величина разности меньше заданной пороговой величины, содержит: когда абсолютная величина разности меньше первой заданной пороговой величины, определение, что видеокамера находится в выдвинутой вперед позиции.
В некоторых вариантах, операция инициирования, введенная пользователем, представляет собой операцию инициирования для выключения видеокамеры; первый опорный сигнал далее представляет собой первый опорный сигнал для отведенной назад позиции, и второй опорный сигнал далее представляет собой второй опорный сигнал для отведенной назад позиции; и заданная пороговая величина далее представляет собой вторую заданную пороговую величину. Эти первый опорный сигнал для отведенной назад позиции и второй опорный сигнал для отведенной назад позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции. Процедура управления, когда принята введенная пользователем операция инициирования, приводным узлом для приведения кронштейна в движение с целью перемещения его в заданном направлении содержит: когда принята введенная пользователем операция инициирования для выключения видеокамеры, управление приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении. Соответственно, процедура вычисления разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным сигналом дополнительно содержит: соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом для отведенной назад позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для отведенной назад позиции. Процедура определения, является ли абсолютная величина разности меньше заданной пороговой величины, дополнительно содержит: определение, является ли абсолютная величина разности меньше второй заданной пороговой величины. Процедура определения, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции, когда абсолютная величина разности меньше заданной пороговой величины, дополнительно содержит: когда абсолютная величина разности меньше второй заданной пороговой величины, определение, что видеокамера находится в отведенной назад позиции.
В одном из вариантов, способ определения положения дополнительно содержит: когда абсолютная величина разности не меньше первой заданной пороговой величины, управление кронштейном для продолжения движения и перемещения в первом направлении, и определение, находится ли видеокамера в выдвинутой вперед позиции; когда видеокамера по-прежнему не находится в выдвинутой вперед позиции, управление кронштейном для приведения его в движение и перемещения во втором направлении, так что видеокамера находится в отведенной назад позиции.
В одном из вариантов, способ определения положения дополнительно содержит: когда абсолютная величина разности не меньше второй заданной пороговой величины, управление кронштейном для продолжения движения во втором направлении, и определение, находится ли видеокамера в отведенной назад позиции; когда видеокамера по-прежнему находится не в отведенной назад позиции, управление приводным узлом для остановки работы.
В некоторых вариантах, способ определения положения дополнительно содержит : когда видеокамера находится в выдвинутой вперед позиции, получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла; определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал; когда первый индукционный сигнал и второй индукционный сигнал изменяются, определение, является ли величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины; и когда величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины, управление приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции.
В некоторых вариантах, прежде этапа «управление приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции», способ определения положения дополнительно содержит: получение третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между третьим индукционным сигналом и стационарным сигналом; определение, является ли абсолютная величина этой разности больше опорной пороговой величины; когда абсолютная величина разности не больше опорной пороговой величины, управление приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции.
В одном из вариантов, до этапа управления приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции, способ определения положения дополнительно содержит: получение третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между третьим индукционным сигналом и стационарным сигналом; получение третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом, где третий индукционный сигнал генерируют в результате восприятия магнитного поля первого магнита посредством третьей рабочей поверхности датчика Холла, и стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, где мобильный терминал не подвергается воздействию внешнего магнитного поля; определение, является ли абсолютная величина разности больше опорной пороговой величины; когда абсолютная величина разности не больше опорной пороговой величины, управление приводным узлом для приведения кронштейна в движение с целью перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции.
В одном из вариантов, способ определения положения дополнительно содержит: когда абсолютная величина разности больше опорной пороговой величин, управление мобильным терминалом для генерации информации подсказки.
Согласно четвертому аспекту, один из вариантов настоящей заявки предлагает машиночитаемый носитель информации, где этот машиночитаемый носитель для хранения информации сохраняет программные команды, так что эти программные команды привлекают для осуществления способа определения положения согласно третьему аспекту.
Краткое описание чертежей
Для описания технических решений согласно вариантам настоящей заявки или известных в технике, далее перечислены прилагаемые чертежи, требуемые для рассмотрения технических решений согласно вариантам настоящей заявки или известных в технике.
Фиг. 1 представляет упрощенный вид спереди видеокамерного устройства мобильного терминала, когда это устройство выдвинуто вперед из корпуса терминала согласно одному из вариантов настоящей заявки;
Фиг. 2 представляет упрощенный вид мобильного терминала, показанного на Фиг. 1, с другой точки зрения;
Фиг. 3 представляет упрощенный вид сзади части структуры мобильного терминала со снятой задней частью корпуса согласно другому варианту настоящей заявки;
Фиг. 4 представляет упрощенную схему механизма для определения положения согласно одному из вариантов настоящей заявки;
Фиг. 5 представляет упрощенную схему механизма для определения положения согласно другому варианту настоящей заявки;
Фиг. 6 представляет упрощенную схему механизма для определения положения согласно еще одному другому варианту настоящей заявки;
Фиг. 7 представляет упрощенную схему принципа работы датчика Холла, показанного на Фиг. 5;
Фиг. 8 представляет упрощенную схему, когда второй корпус, показанный на Фиг. 5, находится во втором пространственном состоянии;
Фиг. 9 представляет упрощенную схему, когда второй корпус, показанный на Фиг. 5, находится в первом пространственном состоянии;
Фиг. 10 представляет упрощенную схему, когда второй корпус, показанный на Фиг. 6, находится во втором пространственном состоянии;
Фиг. 11 представляет упрощенную схему, когда второй корпус, показанный на Фиг. 6, находится в первом пространственном состоянии;
Фиг. 12 представляет структурную блок-схему мобильного терминала согласно одному из вариантов настоящей заявки;
Фиг. 13 представляет упрощенную схему сценария применения мобильного терминала;
Фиг. 14 представляет упрощенный вид сзади мобильного терминала согласно другому варианту настоящей заявки;
Фиг. 15 представляет упрощенную схему сценария применения мобильного терминала, показанного на Фиг. 14;
Фиг. 16 представляет логическую схему способа определения положения согласно одному из вариантов настоящей заявки;
Фиг. 17 представляет логическую подсхему этапа S1603, показанного на Фиг. 16;
Фиг. 18 представляет логическую схему способа определения положения согласно другому варианту настоящей заявки;
Фиг. 19 представляет логическую схему способа определения положения согласно еще одному другому варианту настоящей заявки; и
Фиг. 20 представляет логическую схему способа определения положения согласно еще одному другому варианту настоящей заявки.
Осуществление изобретения
Настоящая заявка предлагает мобильный терминал и механизм определения положения, применяемый в этом мобильном терминале. Этот механизм для определения положения конфигурирован для определения положения видеокамерного устройства в мобильном терминале, чтобы обеспечить правильное пространственное состояние видеокамеры и тем самым создать условия для проведения съемки, а также для защиты видеокамерного устройства. В последующем рассмотрены варианты настоящей заявки со ссылками на прилагаемые чертежи.
На Фиг. 1 представлен упрощенный вид спереди видеокамерного устройства 23 мобильного терминала 200, выдвинутого вперед из корпуса 22 терминала согласно одному из вариантов настоящей заявки. Мобильный терминал 200 может представлять собой мобильный терминал какого-либо типа, такой как смартфон, разумные часы, планшетный компьютер, персональный цифровой помощник (personal digital assistant, PDA), торговый терминал (кассовый аппарат) (point of sales, POS), автомобильный компьютер, настольный компьютер, компьютер ноутбук или интеллектуальный телевизор. В этом варианте настоящей заявки это не ограничивается.
Как показано на Фиг. 1, мобильный терминал 200 содержит экран 21 дисплея, корпус 22 и устройство 23 видеокамеры. Экран 21 дисплея установлен на корпусе 22, и дисплейная поверхность этого экрана 21 дисплея является передней областью мобильного терминала 200. На Фиг. 2 представлен упрощенный вид мобильного терминала 200, показанного на Фиг. 1, с другой точки зрения. Корпус 22 имеет отверстие 221. В этом варианте, отверстие 221 расположено на мобильном терминале 200 сверху, а устройство 23 видеокамеры может выдвигаться из корпуса 22 вперед или отходить назад внутрь корпуса 22 от отверстия 221. Можно понимать, что позиция для установки видеокамерного устройства 23 в мобильном терминале 200 ничем не ограничивается.
На Фиг. 3 представлен упрощенный вид сзади части конструкции мобильного терминала 200 со снятой задней частью корпуса. Как показано на Фиг. 3, корпус 22 имеет внутри пространство 201 для помещения видеокамеры. Это внутреннее пространство 201 сообщается с отверстием 221. Устройство 23 видеокамеры может подвижно располагаться во внутреннем пространстве 201 и может выдвигаться вперед или отводиться назад внутрь корпуса 22 через отверстие 221. В одном из вариантов, мобильный терминал 200 дополнительно содержит механизм 100 определения положения. Этот механизм 100 определения положения расположен во внутреннем пространстве 201 корпуса и конфигурирован для приведения видеокамерного устройства 23 в движение с целью выдвижения вперед или отведения назад и для определения конкретной позиции видеокамерного устройства 23. Механизм 100 определения положения содержит первый корпус 10, второй корпус 20, первый магнит 30 и датчик Холла 50. Второй корпус 20 расположен на некотором расстоянии от первого корпуса 10 и может перемещаться относительно первого корпуса 10. Первый магнит 30 установлен на втором корпусе 20 и может перемещаться вместе с этим вторым корпусом 20. Датчик Холла 50 расположен на первом корпусе 10. Устройство 23 видеокамеры смонтировано на механизме для определения положения, и выдвигается из корпуса 22 вперед или отводится назад в этот корпус 22, когда это устройство приводится в движение механизмом для определения положения.
На Фиг. 4 представлена упрощенная структурная схема механизма 100 для определения положения в соответствии с одним из вариантов настоящей заявки. В этом варианте, первый корпус 10 представляет собой печатную плату, где эта печатная плата расположена во внутреннем пространстве 201 и неподвижно закреплена в корпусе 22. Второй корпус 20 представляет собой кронштейн. Устройство 23 видеокамеры содержит видеокамеру 231 и приводной узел 232. Видеокамера 231 смонтирована на кронштейне, и приводной узел 232 жестко закреплен на кронштейне для приведения в движение этого кронштейна с целью выдвигать видеокамеру 231 вперед или отводить ее назад из корпуса 22 через отверстие 221. В частности, видеокамера 231 прикреплена к концу кронштейна, близкому к отверстию 221.
В этом варианте, датчик Холла 50 расположен на стороне печатной платы, обращенной к экрану 21 дисплея. Первый магнит 30 расположен на стороне кронштейна, обращенной к экрану 21 дисплея.
Печатная плата, также известная как главная плата мобильного терминала 200, представляет собой один из основных и наиболее важных корпусов мобильного терминала 200. Различные интегральные схемы (чипы) управления (такие как процессоры и интегральные схемы (чипы) управления вводом/выводом I/O) и разнообразные электронные корпусы (такие как разнообразные интегральные схемы (чипы), резисторы и конденсаторы) установлены на этой печатной плате, где проложены также соединительные проводники. Датчик Холла 50 может быть припаян к печатной плате, так что генерируемый индукционный сигнал передают целевому элементу (такому как процессор) по специальному проводнику, осуществляющему электрическое соединение между датчиком Холла 50 и другим электронным элементом. Например, датчик Холла 50 электрически соединен с процессором и передает генерируемый им индукционный сигнал этому процессору. Процессор определяет телескопическую позицию видеокамеры 231 на основе индукционного сигнала.
В этом варианте, устройство 23 видеокамеры конфигурировано для получения изображения сцены, портрета или другого подобного изображения на передней стороне мобильного терминала 200, иными словами, устройство 23 видеокамеры используется в качестве переднего видеокамерного устройства. В другом варианте, устройство 23 видеокамеры может быть использовано в качестве заднего видеокамерного устройства или другого подобного устройства, а также устройство 23 видеокамеры может, в качестве альтернативы, быть конфигурировано как поворачиваемое видеокамерное устройство, что здесь не ограничивается.
Следует отметить, что настоящая заявка не ограничивает конкретную конструкцию мобильного терминала 200, исходя из того, что этот мобильный терминал 200 имеет внутреннее пространство 201 для помещения в него видеокамерного устройства 23, и это устройство 23 видеокамеры может выдвигаться вперед или отводится назад, внутрь этого пространства.
Для повышения точности перемещения второго корпуса 20 и надежности работы мобильного терминала, в одном из вариантов, приводной узел 232 содержит ведущий элемент 2321, адаптер 2322 и ходовой винт 2323. Ведущий элемент 2321 расположен во внутреннем пространстве 201 терминала, а ходовой винт 2323 имеет вращательное соединение с этим ведущим элементом 2321. Один конец адаптера 2322 жестко соединен со вторым корпусом 20, а другой конец этого адаптера 2322 образует вращательное соединение с ходовым винтом 2323. Поэтому, когда ведущий элемент 2321 приводит ходовой винт 2323 во вращение, адаптер 2322 может приводить второй корпус 20 в движение.
Например, когда ведущий элемент 2321 вращает ходовой винт 2323 против часовой стрелки, второй корпус 20 приводит видеокамеру 231 в движение для перемещения в направлении отверстия 221 (первое направление); когда ведущий элемент 2321 вращает ходовой винт 2323 по часовой стрелке, второй корпус 20 приводит видеокамеру 231 в движение для перемещения во втором направлении с целью отведения ее назад внутрь корпуса 22. Можно понять, что направление, в котором ведущий элемент 2321 вращает ходовой винт 2323, здесь не ограничено. Например, когда ведущий элемент 2321 вращает ходовой винт 2323 по часовой стрелке, видеокамера 231 может выдвигаться вперед изнутри корпуса 22 через отверстие 221. Когда ведущий элемент 2321 вращает ходовой винт 2323 против часовой стрелки, видеокамера 231 может отводиться назад внутрь корпуса 22 через это отверстие 221 и располагаться во внутреннем пространстве 201 корпуса. В этом варианте, ведущий элемент 2321 представляет собой шаговый двигатель. Можно понять, что возможные варианты ведущего элемента 2321 не ограничиваются шаговым двигателем, так что этот ведущий элемент 2321 может в качестве альтернативы представлять собой такой приводное устройство, как пневматический цилиндр или гидравлический (масляный) цилиндр.
На Фиг. 5 представлена упрощенная схема механизма 100 для определения положения, рассматриваемого в другом варианте настоящей заявки. Датчик Холла 50 воспринимает магнитное поле первого магнита 30 и генерирует индукционный сигнал. Этот датчик Холла 50 содержит первую рабочую поверхность a и вторую рабочую поверхность b, протяженные соответственно в разных направлениях. Датчик Холла 50 воспринимает магнитное поле первого магнита 30 через первую рабочую поверхность a и генерирует первый индукционный сигнал, а также этот датчик Холла 50 далее воспринимает магнитное поле первого магнита 30 через вторую рабочую поверхность b и генерирует второй индукционный сигнал. Эти первый индукционный сигнал и второй индукционный сигнал используются для определения пространственного состояния второго корпуса 20. Пространственное состояние второго корпуса 20 может представлять собой первую процедуру перемещения, в которой второй корпус 20 движется в первом направлении, вторую процедуру перемещения, в которой второй корпус 20 движется во втором направлении, первое пространственное состояние, в котором второй корпус 20 движется в указанном первом направлении к первой заданной позиции, или второе пространственное состояние, в котором второй корпус 20 движется в указанном втором направлении ко второй заданной позиции. В одном из вариантов, второе направление противоположно первому направлению.
Иными словами, мобильный терминал 200 в этом варианте настоящей заявки может определить пространственное состояние видеокамеры 231 на основе первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50. Например, когда видеокамера 231 находится в выдвинутой вперед позиции, пользователь может использовать эту видеокамеру 231 для фотографирования, а когда видеокамера 231 находится в отведенной назад позиции, эта видеокамера 231 может быть защищена. Пространственное состояние видеокамеры 231 может представлять собой процедуру выдвижения вперед (соответствует первой процедуре перемещения), процедуру отведения назад (соответствует второй процедуре перемещения), выдвинутую вперед позицию (соответствует первому пространственному состоянию) или отведенную назад позицию (соответствует второму пространственному состоянию). «Процедура отведения назад» здесь представляет собой процесс, в ходе которого видеокамера 231 отводится извне во внутреннее пространство 201 терминала. «Процедура выдвижения вперед» здесь представляет собой процесс, в ходе которого видеокамера 231 выдвигается вперед из внутреннего пространства 201 терминала наружу. «Отведенная назад позиция» здесь означает, что видеокамера 231 располагается во внутреннем пространстве 201 мобильного терминала 200. «Выдвинутая вперед позиция» здесь означает, что видеокамера 231 выдвинута вперед из внутреннего пространства 201 мобильного терминала 200 и располагается вне этого внутреннего пространства 201.
Согласно мобильному терминалу 200 и механизму 100 определения положения, рассматриваемым в этом варианте настоящей заявки, поскольку датчик Холла 50 содержит первую рабочую поверхность a и вторую рабочую поверхность b, этот датчик Холла 50 может воспринимать магнитное поле первого магнита 30 через первую рабочая поверхность a и генерировать первый индукционный сигнал, а также этот датчик Холла 50 далее воспринимает магнитное поле первого магнита 30 через вторую рабочую поверхность b и генерировать второй индукционный сигнал, так что когда второй корпус 20 движется относительно первого корпуса 10, датчик Холла 50 передает на выход два индукционных сигнала (первый индукционный сигнал и второй индукционный сигнал) для определения состояния второго движущегося корпуса 20. Иными словами, пространственное состояние второго корпуса 20 может быть определено только тогда, когда оба эти сигнала удовлетворяют заданному условию. Это может повысить точность определения по сравнению с существующим датчиком Холла, имеющим только одну рабочую поверхность.
В одном из вариантов, для восприятия магнитного поля, генерируемого первым магнитом 30, в более широких пределах и для дальнейшего повышения точности определения, направления перемещения первой рабочей поверхности a и второго корпуса 20 являются по существу взаимно перпендикулярными. Вторая рабочая поверхность b по существу перпендикулярна первой рабочей поверхности a, и обе поверхности – и первая рабочая поверхность a, и вторая рабочая поверхность b, по существу перпендикулярны поверхности первого корпуса 10, на которой установлен датчик Холла 50.
В некоторых вариантах, для того, чтобы иметь возможность обнаруживать помехи со стороны внешнего магнитного поля, датчик Холла 50 дополнительно содержит третью рабочую поверхность c, направление протяженности которой отличается от направлений протяженности обеих других поверхностей – и первой рабочей поверхности a, и второй рабочей поверхности b. Третья рабочая поверхность c может быть по существу параллельна поверхности первого корпуса 10, на которой устанавливают датчик Холла 50. Этот датчик Холла 50 воспринимает магнитное поле первого магнита 30 и/или внешнее магнитное поле через третью рабочую поверхность c и генерирует третий индукционный сигнал. Этот третий индукционный сигнал используется для определения, воздействуют ли на механизм 100 для определения положения помехи со стороны внешнего магнитного поля. Это внешнее магнитное поле представляет собой магнитное поле, генерируемое объектом, отличным от первого магнита 30.
Когда внешнего магнитного поля нет, третий индукционный сигнал, генерируемый датчиком Холла 50, не изменяется, а когда внешнее магнитное поле присутствует, третий индукционный сигнал, генерируемый датчиком Холла 50, изменяется. Иными словами, когда внешнего магнитного поля нет, тогда независимо от того, как второй корпус 20 перемещается относительно первого корпуса 10, магнитные потоки магнитных полей, генерируемых первым магнитом 30 и вторым магнитом 40, описываемым ниже, которые (потоки) проходят через третью рабочую поверхность, являются одинаковыми. В качестве альтернативы, когда внешнего магнитного поля нет, третий индукционный сигнал, генерируемый датчиком Холла 50, равен 0; и когда внешнее магнитное поле присутствует, третий индукционный сигнал, генерируемый датчиком Холла 50, не равен 0. Иными словами, когда внешнего магнитного поля нет, тогда независимо от того, как второй корпус 20 перемещается относительно первого корпуса 10, магнитные потоки магнитных полей, генерируемых первым магнитом 30 и вторым магнитом 40, описываемым ниже, которые (потоки) проходят через третью рабочую поверхность, все равны 0.
В некоторых вариантах, третья рабочая поверхность c по существу перпендикулярна первой рабочей поверхности a и второй рабочей поверхности b по отдельности, иными словами, третья рабочая поверхность c по существу параллельна поверхности печатной платы, обращенной к экрану дисплея, чтобы уменьшить помехи от существующего магнитного поля и повысить точность восприятия внешнего магнитного поля.
Обратимся ко всем вместе Фиг. 3, Фиг. 4 и Фиг. 6. На Фиг. 6 представлена упрощенная схема механизма 100 для определения положения, рассматриваемого еще в одном другом варианте настоящей заявки. В некоторых вариантах, для повышения точности определения пространственного состояния второго корпуса 20, механизм 100 для определения положения дополнительно содержит второй магнит 40. Второй магнит 40 и первый магнит 30 расположены на некотором расстоянии один от другого на втором корпусе 20. Датчик Холла 50 воспринимает магнитное поле первого магнита 30 и/или второго магнита 40 через первую рабочую поверхность a и генерирует первый индукционный сигнал, и датчик Холла 50 далее воспринимает магнитное поле первого магнита 30 и/или второго магнита 40 через вторую рабочую поверхность b и генерирует второй индукционный сигнал. В этом варианте, поскольку первый индукционный сигнал и второй индукционный сигнал генерируют посредством восприятия поля по меньшей мере одного из двух магнитов, когда второй корпус 20 движется, первый индукционный сигнал и второй индукционный сигнал имеют относительно высокую скорость изменения. Далее позиция второго корпус 20 в процессе его перемещения может быть определена на основе разных первых индукционных сигналов и вторых индукционных сигналов, повышая тем самым точность определения пространственного состояния второго корпуса.
В некоторых вариантах, когда второй корпус 20 перемещается относительно первого корпуса 10, первый магнит 30 и второй магнит 40 перемещаются относительно датчика Холла 50, и этот датчик Холла 50 всегда располагается в пределах магнитного поля, генерируемого по меньшей мере одним из магнитов – первым магнитом 30 и/или вторым магнитом 40, так что независимо от позиции, к которой второй корпус 20 перемещается относительно первого корпуса 10, датчик Холла 50 может генерировать первый индукционный сигнал и второй индукционный сигнал, тем самым обеспечивая стабильность определения.
Например, в одном из вариантов, независимо от того, как перемещается второй корпус 20, до тех пор, пока обеспечивается, что в процессе перемещения второго корпуса 20, расстояние между центральной точкой датчика Холла 50 и поверхностью магнита, ближайшей к датчику Холла 50, меньше 5 мм, можно быть уверенным, что датчик Холла 50 всегда располагаются в пределах областей магнитных полей, генерируемых первым магнитом 30 и вторым магнитом 40. Разумеется, объем датчика Холла 50 и объем магнита не являются фиксированными, напряженность генерируемого магнитного поля является неопределенной и способность воспринимать магнитное поле также является неопределенной. Поэтому относительное взаимное расположение между датчиком Холла 50 и первым магнитом 30 и вторым магнитом 40 не ограничивается, до тех пор, пока можно быть уверенными, что когда второй корпус 20 перемещается относительно первого корпуса 10, датчик Холла 50 всегда располагается в пределах области магнитного поля, генерируемого по меньшей мере одним из магнитов – первым магнитом и/или вторым магнитом 40.
Можно понять, что поскольку относительное расстояние между первым корпусом 10 и вторым корпусом 20 не фиксировано и может быть установлено в соответствии с требованиями конкретной конструкции, позиция, в которой датчик Холла 50 устанавливают на печатной плате, и позиции, в которых первый магнит 30 и второй магнит 40 установлены на втором корпусе 20, также не фиксированы, до тех пор, пока можно быть уверенными, что независимо от того, как второй корпус 20 перемещается относительно первого корпуса 10, датчик Холла 50 всегда располагается в пределах области магнитного поля, генерируемого по меньшей мере одним из магнитов – первым магнитом 30 и/или вторым магнитом 40.
В дополнение к этому, в некоторых вариантах, магнитное поле, генерируемое первым магнитом 30, и магнитное поле, генерируемое вторым магнитом 40, накладываются одно на другое, так что когда второй корпус 20 перемещается относительно печатной платы, магнитный поток, воспринимаемый первой рабочей поверхностью a и второй рабочей поверхностью b, сильно изменяется. Это может повысить чувствительность датчика Холла 50 к восприятию магнитного поля, тем самым повышая точность определения состояния второго корпуса 20.
Например, в одном из вариантов, когда расстояние между двумя соседними торцевыми поверхности первого магнита 30 и второго магнита 40 меньше 6 мм, можно быть уверенными, что магнитные поля, генерируемые первым магнитом 30 и вторым магнитом 40, накладываются одно на другое. Конечно, поскольку магниты, имеющие разные объемы, генерируют разные магнитные поля, расстояние между первым магнитом 30 и вторым магнитом 40 не ограничивается, до тех пор, пока можно быть уверенными, что магнитные поля, генерируемые первым магнитом 30 и вторым магнитом 40, накладываются одно на другое.
В конкретном варианте оба магнита – первый магнит 30 и второй магнит 40, являются стержневыми магнитами, чтобы способствовать контролю технологического процесса и обеспечить «защиту от дурака» в процессе производства. Безусловно, формы первого магнита 30 и второго магнита 40 ничем специально не ограничены. Например, в другом варианте, первый магнит 30 и второй магнит 40 могут, в качестве альтернативы, быть цилиндрическими магнитами полукруглого поперечного сечения. Плоская поверхность цилиндрического магнита используется для фиксированного прикрепления ко второму корпусу 20 с целью обеспечения стабильности расположения первого магнита 30 и второго магнита 40.
В одном из вариантов, соединительная прямая между центральной точкой первого магнита 30 и центральной точкой второго магнита 40 по существу параллельна направлению перемещения второго корпуса 20. Это может обеспечить такое взаимное расположение между датчиком Холла 50 и первым магнитом 40 и вторым магнитом 40, когда второй корпус 20 перемещается (стрелка L на Фиг. 5), чтобы гарантировать, что датчик Холла 50 может воспринимать магнитные поля, генерируемые первым магнитом 30 и вторым магнитом 40. Центральной точкой здесь называется центр тяжести элемента. Когда элемент является объектом регулярной формы, центральной точкой такого элемента является геометрический центр этого объекта регулярной формы.
В некоторых вариантах, ось север-юг первого магнита 30 и ось север-юг второго магнита 40 по существу параллельны по отдельности направлению перемещения второго корпуса 20, так что в процессе перемещения второго корпуса 20, датчик Холла 50 может воспринимать наложенные одно на другое магнитные поля, генерируемые первым магнитом 30 и вторым магнитом 40.
Для обеспечения чувствительности датчика Холла 50 при определении положения, наложенные одно на другое магнитные поля, генерируемые первым магнитом 30 и вторым магнитом 40, должны обеспечивать, чтобы во время перемещения второго корпуса 20 относительно первого корпуса 10, скорость изменения первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50, удовлетворяла специальному требованию. Поэтому, в одном из вариантов, на смежных концах первого магнита 30 и второго магнита 40 располагаются одноименные магнитные полюсы. В одном из вариантов, эти одноименные магнитные полюсы представляют собой N-полюсы.
Ось север-юг представляет собой вектор магнита от N-полюса к S-полюсу, иными словами, направление магнитного поля. Наиболее магнитная часть магнита называется магнитным полюсом. Магнит, который имеет возможность свободно поворачиваться в горизонтальной плоскости, всегда имеет один магнитный полюс, указывающий на юг, и другой магнитный полюс, указывающий на север, когда магнит остается стационарным. Магнитный полюс, указывающий на юг, называется южным полюсом (S-полюсом), и магнитный полюс, указывающий на север, называется северным полюсом (N-полюсом).
Следует отметить, что в вариантах настоящей заявки, термин «по существу параллельна» можно интерпретировать, как параллельна, приблизительно параллельна или образует конкретный предварительно заданный угол; термин «приблизительно перпендикулярна» можно интерпретировать как вертикально, приблизительно вертикально или расположенный под конкретным заданным углом.
На Фиг. 7 представлена упрощенная схема принципа работы датчика Холла 50. Как показано на Фиг. 7, датчик Холла 50 содержит элемент на эффекте Холла. Например, этот элемент на эффекте Холла представляет собой полупроводниковую пластинку. Рабочей поверхностью датчика Холла 50 является плоскость, в которой этот датчик Холла воспринимает магнитное поле, иными словами, плоскость, в которой располагается полупроводниковая пластинка. Когда датчик Холла 50 работает, через эту полупроводниковую пластинку течет электрический ток, и к ней приложено магнитное поле, ориентированное в вертикальном направлении пластинки. В этом случае, пластинка генерирует разность потенциалов в направлении, перпендикулярном току и магнитному полю. Например, когда рабочая поверхность датчика Холла 50 расположена между первой поверхностью 501 и второй поверхностью 502 и параллельна по отдельности первой поверхности 501 и второй поверхности 502, и когда магнитное поле проходит сквозь датчик Холла 50 от первой поверхности (верхняя поверхность) 501 датчика Холла 50, первая выходная клемма 503 датчика Холла 50 передает на выход сигнал низкого уровня и вторая выходная клемма 504 передает на выход сигнал высокого уровня. Напротив, когда магнитная поле проходит сквозь датчик Холла 50 от второй поверхности (нижняя поверхность) 502 датчика Холла 50, первая выходная клемма 503 датчика Холла 50 передает на выход сигнал высокого уровня, а вторая выходная клемма 504 передает на выход сигнал низкого уровня.
Следует отметить, что на Фиг. 7 показан датчик Холла 50 с двумя выходными клеммами для сигнала напряжения, соответствующими каждой рабочей поверхности, в качестве примера для иллюстрации принципа работы датчика Холла. В другом варианте, каждая рабочая поверхность датчика Холла 50 может, в качестве альтернативы, соответствовать одной выходной клемме, трем выходным клеммам и т.д. Выходной сигнал каждой выходной клеммы может представлять собой сигнал напряжения или сигнал тока, что здесь не ограничивается. Когда магнитное поле проходит сквозь рабочую поверхность датчика Холла 50, выходная клемма датчика Холла 50 передает электрический сигнал в форме напряжения или тока. Когда направления магнитного поля, проходящего сквозь рабочую поверхность датчика Холла 50 различны, выходные электрические сигналы тоже являются различными. Разные электрические сигналы используются для индикации процессору 24 терминала, что следует выполнять разные операции.
В дополнение к этому, датчик Холла 50, используемый в этом варианте настоящей заявки может представлять собой линейный датчик Холла, который содержит элемент на эффекте Холла, линейный усилитель и эмиттерный повторитель. Датчик Холла 50 передает на выход аналоговый сигнал. Безусловно, датчик Холла 50 может, в качестве альтернативы, представлять собой датчик Холла переключающего типа, который содержит стабилизатор напряжения, элемент на эффекте Холла, дифференциальный усилитель, триггер Шмидта и выходной каскад. Этот датчик Холла 50 передает на выход цифровой сигнал.
Следует отметить, что независимо от типа датчика Холла, этот датчик Холла может быть настроен для передачи на выход разных индукционных сигналов на основе разных воспринимаемых напряженностей магнитного поля. Поэтому, когда второй корпус 20 перемещается в другую позицию относительно первого корпуса 10, напряженность магнитного поля, воспринимаемого датчиком Холла 50, будет другой. Таким способом пространственное состояние видеокамеры 231 может быть определено на основе первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50. Когда видеокамера 231 перейдет в другую позицию, магнитное поле, воспринимаемое датчиком Холла 50, становится другим, иными словами, когда второй корпус 20 перемещается, магнитные потоки, проходящие сквозь первую рабочую поверхность a и вторую рабочую поверхность b датчика Холла 50, оказываются другими, и генерируемые таким способом индукционные сигналы являются другими.
На Фиг. 8 представлена упрощенная схема для случая, когда второй корпус 20 механизма 100 для определения положения, показанного на Фиг. 5, находится во втором пространственном состоянии. Как показано на Фиг. 8, когда второй корпус 20 находится во втором пространственном состоянии (соответствует отведенной назад позиции видеокамеры 231), большинство магнитных силовых линий, исходящих из N-полюса первого магнита 30, может проходить сквозь первую рабочую поверхность a и вторую рабочую поверхность b, и возвращаться к S-полюсу первого магнита 30. Предполагая, что в этом случае магнитный поток, проходящий сквозь первую рабочую поверхность a, равен Φ1, и магнитный поток, проходящий сквозь вторую рабочую поверхность b, равен Φ2, первая рабочая поверхность генерирует первый индукционный сигнал v1, и вторая рабочая поверхность b генерирует второй индукционный сигнал v2. Эти первый индукционный сигнал v1 и второй индукционный сигнал v2 могут быть одинаковыми или разными. Когда второй корпус 20 перемещается, расстояние между N-полюсом первого магнита 30 и датчиком Холла 50 постепенно становится меньше и затем снова увеличивается. В процессе этого перемещения количество магнитных силовых линий, проходящих сквозь первую рабочую поверхность a и вторую рабочую поверхность b, изменяется, и поэтому первый индукционный сигнал v1 и второй индукционный сигнал v2 изменяются соответственно. Например, индукционный сигнал представляет собой в этом варианте сигнал напряжения. Когда магнитный поток, проходящий сквозь рабочую поверхность, становится больше, сигнал напряжения с выхода датчика Холла увеличивается.
На Фиг. 9 представлена упрощенная схема для случая, когда второй корпус 20 механизма 100 для определения положения, показанного на Фиг. 5, находится в первом пространственном состоянии. Как показано на Фиг. 9, когда второй корпус 20 перемещается в первое пространственное состояние (соответствует нахождению видеокамеры 231 в выдвинутой вперед позиции), в предположении, что магнитный поток, проходящий сквозь рабочую поверхность a, равен Φ3, и магнитный поток, проходящий сквозь вторую рабочую поверхность b, равен Φ4, первая рабочая поверхность a генерирует первый индукционный сигнал v3, и вторая рабочая поверхность b генерирует второй индукционный сигнал v4. Поскольку в этой позиции только часть магнитных силовых линий, исходящих из N-полюса первого магнита 30, может проходить сквозь первую рабочую поверхность a и вторую рабочую поверхность b и возвращаться к S-полюсу первого магнита 30, первый индукционный сигнал v3 слабее первого индукционного сигнала v1, и второй индукционный сигнал v4 слабее второго индукционного сигнала v2. Иными словами, когда второй корпус 20 перемещается в другую позицию относительно первого корпуса 10, первые индукционные сигналы, генерируемые первой рабочей поверхностью a датчика Холла 50, становятся другими, и вторые индукционные сигналы, генерируемые второй рабочей поверхностью b датчика Холла 50, также становятся другими. Поэтому позиция, куда переместился второй корпус 20 относительно первого корпуса 10, может быть определена на основе первого индукционного сигнала и второго индукционного сигнала.
В некоторых вариантах, для обеспечения того, чтобы во время перемещения второго корпуса 20 датчик Холла 50 мог генерировать оба сигнала – соответствующий первый индукционный сигнал и соответствующий второй индукционный сигнал, независимо от того, находится ли второй корпус 20 в первом пространственном состоянии или во втором пространственном состоянии, соединительная прямая между центральной точкой датчика Холла 50 и центром торцевой поверхности первого магнита с соответствующей полярностью и близкой к центру датчика Холла 50 по существу перпендикулярна направлению перемещения второго корпуса 20.
Обратимся к Фиг. 10 и Фиг. 11 совместно. На Фиг. 10 представлена упрощенная схема для случая, когда второй корпус 20 механизма 100 для определения положения, показанного на Фиг. 6, находится во втором пространственном состоянии. На Фиг. 11 представлена упрощенная схема для случая, когда второй корпус 20 механизма 100 для определения положения, показанного на Фиг. 6, находится в первом пространственном состоянии. Аналогично, когда второй корпус 20 оснащен первым магнитом 30 и вторым магнитом 40, для обеспечения, что во время перемещения второго корпуса 20 датчик Холла 50 генерирует соответствующий первый индукционный сигнал и соответствующий второй индукционный сигнал, в некоторых вариантах, когда второй корпус 20 находится во втором пространственном состоянии, торцевая поверхность первого магнита 30, обращенная прочь от второго магнита 40, находится близко к датчику Холла 50, а соединительная прямая между центральной точкой датчика Холла 50 и центром торцевой поверхности первого магнита 30 с соответствующей полярностью и близкой к центру датчика Холла 50 по существу перпендикулярна направлению перемещения второго корпуса 20; когда второй корпус 20 находится в первом пространственном состоянии, торцевая поверхность второго магнита 40, обращенная прочь от первого магнита 30 близка к датчику Холла 50, а соединительная прямая между центральной точкой датчика Холла 50 и центром торцевой поверхности второго магнита 40 с соответствующей полярностью и близкой к центру датчика Холла 50 по существу перпендикулярна направлению перемещения второго корпуса 20.
На Фиг. 12 представлена структурная блок-схема мобильного терминала 200 согласно одному из вариантов настоящей заявки. Мобильный терминал 200 дополнительно содержит по меньшей мере один процессор 24, шину 25 связи, по меньшей мере один интерфейс 26 связи и запоминающее устройство 27. Можно понимать, что на Фиг. 12 представлен только один из примеров мобильного терминала 200, который не накладывает ограничений на мобильный терминал 200. Мобильный терминал 200 может содержать больше или меньше корпусов, чем показано на Фиг. 12, или объединять некоторые корпусы, или содержать другие корпусы. Например, мобильный терминал 200 может дополнительно содержать устройство ввода/вывода, устройство доступа в сеть связи и другие подобные устройства.
Процессор 24 соединен для осуществления связи по меньшей мере с одним интерфейсом 26 связи, запоминающим устройством 27, экраном 21 дисплея, ведущим элементом 2321 и датчиком Холла 50 по шине 25 связи. Процессор 24 может представлять собой центральный процессор (Central Processing Unit, CPU), или же процессор может представлять собой какой-либо другой процессор общего назначения, цифровой процессор сигнала (Digital Signal Processor, DSP), специализированную интегральную схему (Application Specific Integrated Circuit, ASIC), программируемую пользователем вентильную матрицу (Field-Programmable Gate Array, FPGA) или другое программируемое логическое устройство, дискретный вентиль или транзисторное логическое устройство, дискретный аппаратный узел или другой подобный корпус. Процессор общего назначения может представлять собой микропроцессор или какой-либо обычный процессор и т.п. Этот процессор является центром управления мобильного терминала 200 и соединен с различными частями всего мобильного терминала 200 с использованием различных интерфейсов и линий.
Шина 25 связи может представлять собой путь для передачи информации между перечисленными выше корпусами.
Интерфейс 26 связи конфигурирован для связи, с использованием какой-либо аппаратуры, такой как приемопередатчик, с другим устройством или с сетью связи, такой как Этернет, сеть радио доступа (radio access network, RAN) или локальная сеть радиосвязи (wireless local area networks, WLAN).
Запоминающее устройство 27 может быть конфигурировано для сохранения компьютерной программы и/или модуля. Процессор 24 осуществляет разнообразные функции мобильного терминала 200 посредством выполнения компьютерной программы и/или модуля, сохраняемых в запоминающем устройстве 27, и вызова данных, сохраняемых в этом запоминающем устройстве 27. Запоминающее устройство 27 может в основном содержать область хранения программ и область хранения данных. В области хранения программ могут быть записаны операционная система, прикладная программа, необходимая для осуществления нескольких функций (таких как функция воспроизведения звука и функции воспроизведения изображений), и другие подобные программы. Область хранения данных может сохранять данные (такие как аудиоданные и телефонная книга), созданные на основе использования мобильного терминала 200, и другие подобные данные. В дополнение к этому, запоминающее устройство 27 может содержать высокоскоростное запоминающее устройство с произвольной выборкой и может далее содержать энергонезависимое запоминающее устройство, такое как жесткий диск, хранилище данных, сменный диск, тонкая карта памяти (Smart Media Card, SMC), защищенную цифровую карточку (Secure Digital, SD), флэш-карточку (Flash Card), несколько накопителей на магнитных дисках, устройство флэш-памяти или другое энергозависимое твердотельное запоминающее устройство. Запоминающее устройство 27 может существовать независимо и быть соединяемым с процессором 24 с использованием шины 25 связи. В качестве альтернативы, запоминающее устройство 27 может быть интегрировано в процессор 24.
В одном из конкретных вариантов реализации, процессор 24, показанный на Фиг. 7, может содержать один или несколько процессоров CPU, таких как CPU 0 и CPU 1.
В одном из конкретных вариантов реализации, мобильный терминал 200 может содержать несколько процессоров, например, процессор 24 и процессор 241, как показано на Фиг. 12. Каждый из этих процессоров может быть одноядерным (single-CPU) процессором или многоядерным (multi-CPU) процессором. Здесь процессор может представлять собой одно или несколько устройств, схем и/или процессорных ядер, конфигурированных для обработки данных (таких как команды компьютерных программ).
В одном из вариантов настоящей заявки, когда видеокамера 231 должна выдвинуться вперед из корпуса 22, процессор 24 может передать сигнал управления ведущему элементу 2321 для того, чтобы этот ведущий элемент 2321 начал работать, с целью приведения второго корпуса 20 в движение для дальнейшего перемещения видеокамеры 231 в направлении выдвижения через отверстие 221 в корпусе мобильного терминала 200 наружу, или для перемещения в направлении отведения назад во внутреннее пространство 201 мобильного терминала 200. В этом случае, датчик Холла 50 может генерировать первый индукционный сигнал и второй индукционный сигнал в результате восприятия магнитных полей первого магнита 30 и второго магнита 40, и передавать обратную связь процессору 24. Процессор 24 может сравнивать сигнал, генерируемый датчиком Холла 50, с опорным сигналом и определять состояние видеокамеры 231 на основе результата сравнения.
В одном из вариантов, после приема вводимой пользователем пусковой операции процессор 24 управляет приводным узлом 232 для того, чтобы этот узел начал работать, с целью приведения второго корпуса 20 в движение и дальнейшего перемещения видеокамеры 231 для выдвижения ее вперед или отведения назад внутрь корпуса 22 через отверстие 221. Процессор 24 далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла 50, и определяет пространственное состояние видеокамеры 231 на основе полученных им первого индукционного сигнала и второго индукционного сигнала.
Процедура получения процессором 24 первого индукционного сигнала и второго индукционного сигнала, переданных датчиком Холла 50, и определения пространственного состояния видеокамеры 231 на основе полученных первого индукционного сигнала и второго индукционного сигнала содержит: процессор 24 получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла 50, и определяет, изменяются ли эти первый индукционный сигнал и второй индукционный сигнал непрерывно. Когда первый индукционный сигнал и второй индукционный сигнал больше не изменяются, процессор 24 вычисляет соответственно разность между первым индукционным сигналом и первым опорным сигналом и разность между вторым индукционным сигналом и первым опорным сигналом. Процессор 24 далее определяет, является ли абсолютная величина разности меньше заданной пороговой величины. Когда абсолютная величина разности меньше заданной пороговой величины, процессор 24 определяет, что видеокамера 231 находится в выдвинутой вперед позиции или в отведенной назад позиции. Когда первый индукционный сигнал и второй индукционный сигнал изменяются непрерывно, процессор 24 определяет, что видеокамера 231 находится в процедуре выдвижения вперед или в процедуре отведения назад.
В некоторых вариантах, введенная пользователем операция инициирования представляет собой операцию инициирования для начала работы видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для выдвинутой вперед позиции, и второй опорный сигнал представляет собой второй опорный сигнал для выдвинутой вперед позиции; указанная заданная пороговая величина представляет собой первую заданную пороговую величину. Когда принята введенная пользователем операция инициирования для начала работы видеокамеры 231, процессор 24 управляет приводным узлом 232 для начала работы этого узла с целью приведения второго корпуса 20 в движение для перемещения в первом направлении, так что видеокамера 231 находится в процессе выдвижения вперед. Процессор 24 далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла 50, когда видеокамера 231 находится в процессе выдвижения вперед. Когда эти первый индукционный сигнал и второй индукционный сигнал больше не изменяются, процессор 24 соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разность между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции. Процессор 24 далее определяет, является ли абсолютная величина этой разности меньше первой заданной пороговой величины, и когда абсолютная величина разности меньше первой заданной пороговой величины, определяет, что видеокамера 231 находится в выдвинутой вперед позиции.
Когда второй корпус 20 перемещается в первом направлении, позиции первого магнита 30 и второго магнита относительно датчика Холла 50 изменяются, и поэтому первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла 50 тоже постоянно изменяются. Когда второй корпус 20 останавливает движение, позиции первого магнита 30 и второго магнита 40 относительно датчика Холла 50 остаются фиксированными. В этом случае, первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла 50 имеют тенденцию стабилизироваться, иными словами, перестают изменяться. Поэтому, когда полученные первый индукционный сигнал и второй индукционный сигнал изменяются непрерывно, это означает, что второй корпус 20 находится в состоянии перемещения, иными словами, видеокамера 231 находится в процессе выдвижения вперед или отведения назад. Когда полученные первый индукционный сигнал и второй индукционный сигнал более не изменяется, это означает, что второй корпус 20 находится в состоянии остановленного перемещения. В этом случае, процессор 24 соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разность между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции, и когда абсолютная величина этой разности меньше первой заданной пороговой величины, определяет, что второй корпус 20 переместился в первую заданную позицию, иными словами, видеокамера 231 находится в выдвинутой вперед позиции. Таким способом можно определить, выдвинулась ли видеокамера 231 нормально вперед и находится ли в выдвинутой вперед позиции. В этом варианте, поскольку датчик Холла 50 может генерировать два индукционных сигнала, использование этих двух индукционных сигналов в качестве основы для определения, может повысить точность определения.
В некоторых вариантах, первый индукционный сигнал и второй индукционный сигнал, генерируемые датчиком Холла 50, когда видеокамера 231 находится в выдвинутой вперед позиции, могут быть определены заранее, затем вычисляют среднюю величину нескольких первых индукционных сигналов, полученных в нескольких событиях измерения, и используют эту среднюю величину в качестве первого опорного сигнала для выдвинутой вперед позиции. Аналогично, вычисляют среднюю величину нескольких вторых индукционных сигналов, полученных в нескольких событиях измерения, и используют эту среднюю величину в качестве второго опорного сигнала для выдвинутой вперед позиции.
Когда абсолютная величина разности не меньше первой заданной пороговой величины, это означает, что второй корпус 20 не перемещается к первой заданной позиции, иными словами, видеокамера 231 не выдвинулась полностью вперед из корпуса 22. В таком случае, возможная причина состоит в том, что второй корпус 20 затормозил в процессе перемещения, например, сопротивление движению второго корпуса 20 больше приводного усилия ведущего элемента 2321, и вследствие этого второй корпус 20 останавливается в процессе перемещения. Другой возможной причиной является неисправность какой-либо конкретной структуры мобильного терминала 200. В таком случае, если ведущий элемент 2321 продолжает работу, приводной узел 232 и второй корпус 20 могут быть повреждены. Поэтому, чтобы избежать такой ситуации, в некоторых вариантах, когда абсолютная величина разности не меньше первой заданной пороговой величины, процессор 24 управляет приводным узлом 232 для продолжения работы с целью приведения второго корпуса 20 в движение для продолжения перемещения в первом направлении, и определяет, находится ли видеокамера 231 в выдвинутой вперед позиции. Когда видеокамера 231 все еще не находится в выдвинутой вперед позиции, процессор 24 управляет приводным узлом 232 с целью приведения второго корпуса 20 в движение для перемещения во втором направлении, чтобы отвести видеокамеру 231 назад внутрь корпуса 22, защищая тем самым видеокамеру 231 и приводной узел 232.
В некоторых вариантах, когда определено, что видеокамера 231 находится в выдвинутой вперед позиции, процессор 24 далее регистрирует количество раз, когда видеокамера 231 находится в выдвинутой вперед позиций, чтобы указать, что видеокамера 231 успешно перешла в выдвинутую вперед позицию из корпуса 22. Например, процессор 24 может управлять числом в счетчике от 0 до 1, чтобы указать, что видеокамера 231 успешно выдвинулась из корпуса 22, и когда видеокамера 231 отводится назад в корпус 22, управлять счетчиком для его очистки.
В другом варианте, вводимая пользователем операция инициирования представляет собой операцию инициирования для выключения видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для отведенной назад позиции, и второй опорный сигнал представляет собой второй опорный сигнал для отведенной назад позиции; заданная пороговая величина представляет собой вторую заданную пороговую величину. При приеме введенной пользователем пусковой операции для выключения видеокамеры 231, процессор 24 управляет приводным узлом 232, чтобы он начал работать, с целью привести второй корпус 20 в движение для перемещения во втором направлении, так что видеокамера 231 находится в процессе отведения назад. Процессор 24 далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла 50, когда видеокамера 231 находится в процессе отведения назад, и определяет, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор 24 соответственно вычисляет разность между первым индукционным сигналом и первым опорным сигналом для отведенной назад позиции и разность между вторым индукционным сигналом и вторым опорным сигналом для отведенной назад позиции. Процессор 24 далее определяет, является ли абсолютная величина этой разности меньше второй заданной пороговой величины, и когда абсолютная величина разности меньше второй заданной пороговой величины, определяет, что видеокамера 231 находится в отведенной назад позиции.
В некоторых вариантах, первый индукционный сигнал и второй индукционный сигнал, генерируемые датчиком Холла 50, когда видеокамера 231 находится в отведенной назад позиции, могут быть определены заранее, затем вычисляют среднюю величину нескольких первых индукционных сигналов, полученных в нескольких событиях измерения, когда видеокамера 231 находится в отведенной назад позиции, и используют эту среднюю величину в качестве первого опорного сигнала для отведенной назад позиции. Аналогично, вычисляют среднюю величину нескольких вторых индукционных сигналов, полученных в нескольких событиях измерения, когда видеокамера 231 находится в отведенной назад позиции, и используют эту среднюю величину в качестве второго опорного сигнала для отведенной назад позиции.
Вторая заданная пороговая величина может быть такой же или может отличаться от первой заданной пороговой величины, и может быть специально установлена в соответствии с проектными требованиями. В дополнение к этому, первый опорный сигнал для выдвинутой вперед позиции, первый опорный сигнал для отведенной назад позиции, второй опорный сигнал для выдвинутой вперед позиции и второй опорный сигнал для отведенной назад позиции могут быть установлены прежде поставки мобильного терминала пользователю и сохранены в запоминающем устройстве 27.
Когда абсолютная величина разности не меньше заданной пороговой величины, это означает, что второй корпус 20 не переместился во вторую заданную позицию, иными словами, видеокамера 231 не была полностью отведена назад в корпус 22. В этом случае, возможная причина состоит в том, что второй корпус 20 оказался заторможенным в процессе движения, например, сопротивление движению второго корпуса 20 больше приводного усилия ведущего элемента 2321, и вследствие этого второй корпус 20 останавливается в процессе движения. Другая возможная причина состоит в том, что какая-то конкретная структура в мобильном терминале 200 является неисправной. В таком случае, если ведущий элемент 2321 продолжит работать, приводной узел 232 и второй корпус 20 могут быть повреждены. Поэтому, чтобы избежать такой ситуации, в некоторых вариантах, когда абсолютная величина разности не меньше второй заданной пороговой величины, процессор 24 управляет приводным узлом 232 для продолжения работы, с целью приводить второй корпус 20 в движение для продолжения перемещения во втором направлении и далее определяет, находится ли видеокамера 231 в отведенной назад позиции. Когда видеокамера 231 все еще не находится в отведенной назад позиции, процессор 24 управляет приводным узлом 232 для остановки работы, чтобы защитить приводной узел 232 и второй корпус 20.
В некоторых вариантах, когда определено, что видеокамера 231 находится в отведенной назад позиции, процессор 24 далее регистрирует число раз, когда видеокамера 231 находится в отведенной назад позиции, чтобы обозначить, что видеокамера 231 успешно отведена назад внутрь корпуса 22. Например, процессор 24 может управлять числом в счетчике от 0 к 1 для индикации, что видеокамера 231 была успешно отведена назад в корпус 22.
В процессе определения пространственного состояния видеокамеры 231, могут также существовать помехи со стороны внешнего магнитного поля, и когда такие помехи со стороны внешнего магнитного поля существуют, имеет место погрешность в определении положения видеокамеры 231, иными словами, легко происходит неправильное определение. Поэтому, для обеспечения точности определения положения видеокамеры 231, в некоторых вариантах, независимо от того, является ли рассматриваемая процедура определения положения видеокамеры 231 процедурой определения положения видеокамеры 231 при ее выдвижении вперед, или эта процедура является процедурой определения положения видеокамеры 231 при ее отведении назад, когда получаемые первый индукционный сигнал и второй индукционный сигнал более не изменяются, процессор 24 далее получает третий индукционный сигнал, генерируемый датчиком Холла 50, и вычисляет разность между третьим индукционным сигналом и стационарным сигналом. Процессор далее определяет, является ли абсолютная величина разности больше опорной пороговой величины. Когда абсолютная величина разности больше опорной пороговой величины, это означает, что помехи со стороны внешнего магнитного поля существуют. В этом случае, процессор 24 управляет мобильным терминалом 200 для передачи информации подсказки, что подсказать пользователю оставаться подальше от этого внешнего магнитного поля. Когда абсолютная величина разности не больше опорной пороговой величины, это означает, что отсутствуют помехи со стороны внешнего магнитного поля, или помехи со стороны внешнего магнитного поля являются относительно слабыми и не влияют на определение положения видеокамеры 231. В таком случае, может быть определено положение видеокамеры 231. Стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью c датчика Холла 50, когда мобильный терминал 200 не испытывает помех от внешнего магнитного поля. Например, когда нет внешнего магнитного поля, третья рабочая поверхность c может не генерировать никакого сигнала, так что в этом случае стационарный сигнал может быть установлен равным 0; когда нет внешнего магнитного поля, третья рабочая поверхность c может далее генерировать постоянный индукционный сигнал. Этот постоянный сигнал может быть использован в качестве стационарного сигнала. Когда внешнее магнитное поле присутствует, индукционный сигнал, генерируемый третьей рабочей поверхностью c, изменяется по сравнению со стационарным сигналом, когда величина изменения превышает опорную пороговую величину, это означает, что внешнее магнитное поле является относительно сильным. В дополнение к этому, опорная пороговая величина не ограничена, и может быть определена согласно конкретным проектным требованиям.
В некоторых вариантах, мобильный терминал 200 может быть заранее помещен в среду, где отсутствуют помехи от внешнего магнитного поля, тогда вычисляют среднюю величину нескольких третьих индукционных сигналов, получаемых посредством нескольких событий определения, и используют эту среднюю величину в качестве стационарного сигнала. Этот стационарный сигнал может, в качестве альтернативы, быть установлен прежде поставки мобильного терминала 200 пользователю, и сохранен в запоминающем устройстве 27.
Мобильный терминал 200 может содержать подсказывающее устройство, например, светодиод или зуммер. Когда определено, что существуют помехи от внешнего магнитного поля, можно управлять светодиодом для излучения света или зуммером для генерации звука. Естественно, такое подсказывающее устройство может, в качестве альтернативы, представлять собой экран 10 дисплея. Когда определено, что помехи от внешнего магнитного поля существуют, экраном 10 дисплея управляют для представления информации подсказки.
Когда определено, что видеокамера 231 находится в выдвинутой вперед позиции, если процессор 24 не принял операцию инициирования от пользователя для выключения видеокамеры, эта видеокамера 231 всегда должна быть в выдвинутой вперед позиции, иными словами, второй корпус 20 находится в первой заданной позиции и не движется. Однако, когда видеокамера 231 воспринимает внешнее давление, например, когда пользователь хочет нажать рукой на эту видеокамеру, чтобы отвести ее назад внутрь камеры 22, если ведущий элемент 2321 в этом случае по-прежнему не работает, это оказывает отрицательное влияние на срок службы ведущего элемента 2321, или даже ведущий элемент 2321 повреждается. Поэтому, чтобы избежать такой ситуации, в некоторых вариантах, когда определено, что видеокамера 231 находится в выдвинутой вперед позиции, процессор 24 далее получает первый индукционный сигнал и второй индукционный сигнал, переданные датчиком Холла 50, когда видеокамера 231 находится в выдвинутой вперед позиции, и определяет, изменяются ли эти первый индукционный сигнал и второй индукционный сигнал. Когда первый индукционный сигнал и второй индукционный сигнал изменяются, процессор 24 определяет, является ли величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины. Когда величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины, процессор 24 управляет приводным узлом 232 для запуска его в работу с целью приводить второй корпус 20 в движение с целью перемещения во втором направлении, так что видеокамера 231 отходит назад внутрь корпуса 22. Вопрос о том, изменяются ли первый индукционный сигнал и второй индукционный сигнал, означает, изменился ли первый индукционный сигнал в текущий момент по сравнению с первым индукционным сигналом в предыдущий момент, и изменился ли второй индукционный сигнал в текущий момент по сравнению со вторым индукционным сигналом в предыдущий момент.
Когда величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины, поскольку операция пользователя для выключения видеокамеры 231 не принята, это означает, что видеокамера 231 находится в состоянии, когда на нее нажимает внешняя сила. В этом случае, процессор 24 управляет ведущим элементом 2321 для запуска его в работу с целью привести второй корпус 20 в движение для перемещения его во втором направлении, и далее привести в движение видеокамеру для отведения ее внутрь корпуса 22. Таким способом, после нажатия на видеокамеру 231, мобильный терминал 200 автоматически управляет этой видеокамерой 231 для отведения ее внутрь корпуса 22. В дополнение к команде запуска, переданной путем нажатия кнопки или операции прикосновения, мобильный терминал 200 может далее реагировать на запуск посредством нажатия извне с целью управления видеокамерой 231 для отведения ее внутрь корпуса 22. Это увеличивает число способов выключения видеокамеры 231, повышает степень удобства для пользователя и может защитить приводной узел 232.
Однако изменение первого индукционного сигнала и второго индукционного сигнала может не быть вызвано перемещением второго корпуса 20 в результате внешнего нажатия на видеокамеру 231. Возможно, что имеют место помехи со стороны внешнего магнитного поля. Поэтому, когда видеокамера 231 находится в выдвинутой вперед позиции, и первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла 50 изменяются, далее необходимо определить, существуют ли помехи со стороны внешнего магнитного поля, чтобы избежать неправильного определения и далее избежать отрицательного воздействия на удобство для пользователя. Например, когда пользователь использует видеокамеру 231 для фотографирования, в этом случае, если определено, что первый индукционный сигнал и второй индукционный сигнал с выхода датчика Холла 50 изменяются, и видеокамерой 231 управляют для отведения ее назад, производимое пользователем фотографирование прерывается, что ухудшает восприятие для пользователя.
Поэтому, в некоторых вариантах, прежде чем процессор 24 будет управлять приводным узлом 232 для запуска его в работу, чтобы привести второй корпус 20 в движение для перемещения во втором направлении, так что видеокамера 231 отводится внутрь корпуса 22, процессор 24 далее получает индукционный сигнал, передаваемый датчиком Холла 50, когда видеокамера 231 находится в выдвинутой вперед позиции, и вычисляет разность между третьим индукционным сигналом и стационарным сигналом. Процессор 24 далее определяет, является ли абсолютная величина разности больше опорной пороговой величины. Когда абсолютная величина разности не больше опорной пороговой величины, процессор 24 управляет приводным узлом 232 для запуска его в работу с целью приведения второго корпуса 20 в движение для перемещения во втором направлении, так что видеокамера 231 отводится назад в корпус 22. Когда абсолютная величина разности больше опорной пороговой величины, процессор 24 управляет мобильным терминалом 200 для передачи информации подсказки с целью подсказать пользователю, что следует оставаться подальше от внешнего магнита.
Далее описан пример того, как процессор 24 мобильного терминала 200 определяет конкретную ситуацию, когда принята введенная пользователем операция инициирования.
Одна из таких ситуаций показана на Фиг. 13 и описана с использованием примера, в котором мобильный терминал 200 представляет собой мобильный телефон. Когда в мобильном терминале 200, показанном в этом варианте, инсталлировано приложение видеокамеры, соответствующее видеокамерному устройству 23, интерфейс мобильного терминала 200 может представить на своем дисплее первую иконку 202 приложения видеокамеры. Это приложение видеокамеры содержит прикладное программное обеспечение, способное использовать устройство 23 видеокамеры, такое как WeChat или QQ. Когда процессор 24 мобильного терминала 200 определит, что первая иконка 202 приложения видеокамеры восприняла событие нажатия пользователем, этот процессор 24 управляет мобильным терминалом 200 для перехода в съемочный интерфейс. Процессор 24 управляет ведущим элементом 2321 для приведения ходового винта 2323 во вращение, так что видеокамера 231 выдвигается из корпуса 22 вперед через отверстие 221 для достижения заданной съемочной позиции и оказывается в указанной выдвинутой вперед позиции.
Одна из таких ситуаций показана на Фиг. 14 и описана с использованием примера, в котором мобильный терминал 200 представляет собой мобильный телефон. Этот мобильный терминал 200 содержит первое видеокамерное устройство и второе видеокамерное устройство 28. Первое видеокамерное устройство представляет собой рассмотренное выше устройство 23 видеокамеры, которое, в настоящей заявке, может выдвигаться вперед из корпуса 22 и отводиться назад внутрь корпуса 22 через отверстие 221. Второе видеокамерное устройство 28 фиксированно встроено в заднюю поверхность мобильного терминала 200 и используется в качестве заднего видеокамерного устройства. Когда приложение видеокамеры инсталлировано в мобильном терминале 200, показанном в настоящей заявке, и когда процессор 24 этого мобильного терминала 200 обнаружит, что первая иконка 202 приложения видеокамеры восприняла событие нажатия пользователем (аналогично интерфейсу мобильного терминала, показанному на Фиг. 13), тогда, как показано на Фиг. 15, процессор 24 управляет мобильным терминалом 200 для перехода в съемочный интерфейс 29, а этот съемочный интерфейс 29 содержит вторую иконку 291. В этом варианте, вторая иконка 291 представляет собой иконку приложения для переключения рабочего видеокамерного устройства. Когда процессор 24 обнаружит, что вторая иконка 291 приложения видеокамеры восприняла событие нажатия пользователем, этот процессор 24 управляет переключением видеокамерного устройства, которое нужно использовать. Например, работа от второго видеокамерного устройства 28 используемого мобильным терминалом 200 в текущий момент, переключается на первое видеокамерное устройство, либо работа от первого видеокамерного устройства, используемого мобильным терминалом 200 в текущий момент, переключается на второе видеокамерное устройство 28.
Например, процессор 24 управляет мобильным терминалом 200 для перехода в съемочный интерфейс 29, а представляемый на дисплее контент является изображением, получаемым вторым видеокамерным устройством 28, иными словами, видеокамерное устройство, работающее в текущий момент в мобильном терминале 200, представляет собой второе видеокамерное устройство 28. Когда процессор 24 обнаружит, что вторая иконка 291 приложения видеокамеры восприняла событие нажатия пользователем, этот процессор 24 управляет выключением второго видеокамерного устройства 28 и переключает работу на первое видеокамерное устройство. В качестве другого примера, процессор 24 управляет мобильным терминалом 200 для перехода в съемочный интерфейс 29, а представляемый на дисплее контент является изображением, получаемым первым видеокамерным устройством, иными словами, видеокамерным устройством, работающим в текущий момент в мобильном терминале 200, является первое видеокамерное устройство. Когда процессор 24 обнаружит, что вторая иконка 291 приложения видеокамеры восприняла событие нажатия пользователем, этот процессор 24 управляет выключением первого видеокамерного устройства, так что это первое видеокамерное устройство отводится назад внутрь корпуса 22, и переключает работу на второе видеокамерное устройство 28.
Далее, как показано на Фиг. 13, мобильный терминал 200 может иметь несколько физических кнопок 203. В одном из вариантов, одна из этих физических кнопок 203 является кнопкой включения видеокамерного устройства 23. Когда обнаружено событие запускающего воздействия пользователя на эту кнопку включения, процессор 24 управляет включением или выключением видеокамерного устройства 23. В одном из вариантов, когда процессор 24 мобильного терминала 200 обнаружит событие запускающего воздействия пользователя на одну из физических кнопок, процессор 24 управляет включением видеокамерного устройства 23.
Следует отметить, что в настоящей заявке применение механизма 100 для определения положения в мобильном терминале 200 является только одним из примеров его применения. Понятно, что этот механизм 100 для определения положения может в качестве альтернативы быть применен и в другой конструкции (например, в зонде для гастроскопии), так что его применение не ограничивается мобильным терминалом 200.
На Фиг. 16 представлена логическая схема способа определения положения согласно одному из вариантов настоящей заявки. Этот способ определения положения применим к мобильному терминалу 200, показанному на Фиг. 3. Этот способ определения положения содержит следующие этапы:
Этап S1601: Когда принята операция инициирования, введенная пользователем, управление приводным узлом 232 с целью приведения кронштейна в движение для перемещения в заданном направлении.
Это заданное направление представляет собой первое направление или второе направление. Введенная пользователем операция инициирования представляет собой операцию инициирования для начала работы видеокамеры 231 или операцию инициирования для выключения видеокамеры 231. Например, когда принята введенная пользователем операция для включения видеокамеры 231 в работу, приводным узлом 232 управляют, чтобы начать работать, с целью приведения кронштейна в движение для перемещения в первом направлении и перемещения видеокамеры 231 для выдвижения ее вперед из корпуса 22. В качестве альтернативы, когда принята введенная пользователем операция для включения видеокамеры 231, управляют приводным узлом 232, чтобы он начал работать, с целью приведения кронштейна в движение для перемещения во втором направлении, противоположном первому направлению, и перемещения видеокамеры 231 для отведения ее назад внутрь корпуса 22.
Этап S1602: Получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50.
Первый индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита первой рабочей поверхностью a датчика Холла 50. Второй индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита второй рабочей поверхностью b датчика Холла 50.
Этап S1603: Определение пространственного состояния видеокамеры 231 на основе полученных первого индукционного сигнала и второго индукционного сигнала. Пространственное состояние видеокамеры 231 может представлять собой выдвинутую вперед позицию и отведенную назад позицию.
Согласно способу определения положения в этом варианте настоящей заявки, пространственное состояние видеокамеры 231 определяют на основе полученных первого индукционного сигнала и второго индукционного сигнала, иными словами, пространственное состояние видеокамеры 231 определяют на основе совместного использования двух индукционных сигналов, тем самым повышают точность определения пространственного состояния видеокамеры 231.
На Фиг. 17 представлена логическая подсхема этапа S1603, показанного на Фиг. 16. В некоторых вариантах, этап S1603 содержит, в частности, следующие этапы:
Этап S16031: Определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Если да, осуществляется этап S16039. Если нет, осуществляется этап S16032.
Этап S16032: Получение третьего индукционного сигнала, генерируемого датчика Холла, и вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом.
Третьим индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита 30 посредством третьей рабочей поверхности c датчика Холла 50. Стационарный сигнал является индукционным сигналом, генерируемым третьей рабочей поверхностью c датчиком Холла 50 в среде, в которой мобильный терминал 200 не подвергается воздействию внешнего магнитного поля.
Этап S16033: Определение, является ли абсолютная величина разности больше опорной пороговой величины. Если да, осуществляется этап S16034. Если нет, осуществляется этап S16038.
Этап S16034: Соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным сигналом.
Первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью a и второй рабочей поверхностью b датчика Холла 50, когда видеокамера 231 находится в выдвинутой вперед позиции. В качестве альтернативы, первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью a и второй рабочей поверхностью b датчика Холла 50, когда видеокамера 231 находится в отведенной назад позиции.
Этап S16035: Определение, является ли абсолютная величина разности меньше заданной пороговой величины. Если да, осуществляется этап S16036. Если нет, осуществляется этап S16037.
Этап S16036: Определение, что видеокамера 231 находится в выдвинутой вперед позиции или в отведенной назад позиции.
Этап S16037: Определение, что видеокамера 231 не находится в выдвинутой вперед позиции или в отведенной назад позиции, и управление приводным узлом для того чтобы снова привести кронштейн в движение для перемещения в заданном направлении.
Этап S16038: Управление мобильным терминалом 200 для передачи информации подсказки.
Этап S16039: Определение, что видеокамера 231 находится в выдвинутой вперед позиции или в отведенной назад позиции.
На Фиг. 18 представлена логическая схема способа определения положения согласно другому варианту настоящего изобретения. В некоторых вариантах, введенная пользователем операция инициирования представляет собой операцию инициирования для начала работы видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для выдвинутой вперед позиции, и второй опорный сигнал представляет собой второй опорный сигнал для выдвинутой вперед позиции; заданная пороговая величина представляет собой первую заданную пороговую величину. Эти первый опорный сигнал для выдвинутой вперед позиции и второй опорный сигнал для выдвинутой вперед позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью a и второй рабочей поверхностью b датчика Холла 50, когда видеокамера 231 находится в выдвинутой вперед позиции. Способ определения положения содержит следующие этапы:
Этап S1801: Когда принята введенная пользователем операция инициирования для начала работа видеокамеры 231, управление приводным узлом 232 с целью приведения кронштейна в движение для перемещения в первом направлении.
Этап S1802: Получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50.
Этап S1803: Определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Если да, осуществляется этап S1811. Если нет, осуществляется этап S1804.
Этап S1804: Получение третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом.
Третий индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита 30 посредством третьей рабочей поверхностью c датчика Холла 50. Стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью c датчика Холла 50, в среде, в которой мобильный терминал 200 не подвергается воздействию внешнего магнитного поля.
Этап S1805: Определение, является ли абсолютная величина разности больше опорной пороговой величины. Если да, осуществляется этап S1809. Если нет, осуществляется этап S1806.
Этап S1806: Соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции.
Этап S1807: Определение, является ли абсолютная величина разности меньше первой заданной пороговой величины. Если да, осуществляется этап S1808. Если нет, осуществляется этап S1809.
Этап S1808: Определение, что видеокамера находится в выдвинутой вперед позиции, и регистрация количества раз успешного выдвижения вперед.
В некоторых вариантах, этап регистрации количества раз успешного выдвижения вперед может быть исключен.
Этап S1809: Управление кронштейном для продолжения перемещения в первом направлении и определение, находится ли видеокамера 231 в выдвинутой вперед позиции; когда видеокамера 231 по-прежнему не находится в выдвинутой вперед позиции, управление приводным узлом 232 с целью приведения кронштейна в движение для перемещения его во втором направлении, чтобы перемещать видеокамеру 231 в отведенную назад позицию.
Этап S1810: Управление мобильным терминалом 200 для передачи информации подсказки.
Этап S1811: Определение, что видеокамера 231 находится в выдвинутой вперед позиции.
На Фиг. 19 представлена логическая схема способа определения положения согласно одному из вариантов настоящей заявки. В некоторых вариантах, введенная пользователем операция инициирования представляет собой операцию инициирования для выключения видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для отведенной назад позиции, и второй опорный сигнал представляет собой второй опорный сигнал для отведенной назад позиции; заданная пороговая величина представляет собой вторую заданную пороговую величину. Первый опорный сигнал для отведенной назад позиции и второй опорный сигнал для отведенной назад позиции представляет собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью a и второй рабочей поверхностью b датчика Холла 50, когда видеокамера 231 находится в отведенной назад позиции. Этот способ определения положения содержит следующие этапы:
Этап S1901: Когда принята введенная пользователем операция инициирования, представляющая собой операцию инициирования для выключения видеокамеры 231, управляют приводным узлом 232 с целью приведения кронштейна в движение для перемещения во втором направлении.
Этап S1902: Получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиков Холла 50.
Этап S1903: Определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно. Если да, осуществляется этап S1911. Если нет, осуществляется этап S1904.
Этап S1904: Получение, третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом.
Третий индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита 30 посредством третьей рабочей поверхности c датчика Холла 50. Стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью c датчика Холла 50, в среде, в которой мобильный терминал 200 не подвергается воздействию внешнего магнитного поля.
Этап S1905: Определение, является ли абсолютная величина разности больше опорной пороговой величины. Если да, осуществляется этап S1909. Если нет, осуществляется этап S1906.
Этап S1906: Соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом для отведенной назад позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для отведенной назад позиции.
Этап S1907: Определение, является ли абсолютная величина разности меньше второй заданной пороговой величины. Если да, осуществляется этап S1908. Если нет, осуществляется этап S1909.
Этап S1908: Определение, что видеокамера 231 находится в отведенной назад позиции, и регистрация количества раз, когда произошло успешное отведение назад.
В некоторых вариантах, этап регистрации количества раз, когда произошло успешное отведение назад, может быть исключен.
Этап S1909: Управление кронштейном для продолжения перемещения во втором направлении и определение, находится ли видеокамера 231 в отведенной назад позиции; когда видеокамера 231 по-прежнему не находится в отведенной назад позиции, управление приводным узлом 232 для остановки работы.
Этап S1910: Управление мобильным терминалом 200 для передачи информации подсказки.
Этап S1911: Определение, что видеокамера 231 находится в отведенной назад позиции.
На Фиг. 20 представлена логическая схема способа определения положения согласно еще одному другому варианту настоящей заявки. В некоторых вариантах, этот способ определения положения содержит следующие этапы:
Этап S2001: Когда видеокамера 231 находится в выдвинутой вперед позиции, получение первого индукционного сигнала и второго индукционного сигнала, генерируемых датчиком Холла 50.
Этап S2002: Определение, изменяются ли первый индукционный сигнал и второй индукционный сигнал. Если да, осуществляется этап S2003. Если нет, осуществляется этап S2002.
Этап S2003: Определение, является ли величина изменения каждого из сигналов – первого индукционного сигнала и второго индукционного сигнала, больше третьей заданной пороговой величины. Если да, осуществляется этап S2004. Если нет, осуществляется этап S2003.
Этап S2004: Получение третьего индукционного сигнала, генерируемого датчиком Холла, и вычисление разности между полученным третьим индукционным сигналом и стационарным сигналом.
Третий индукционный сигнал представляет собой индукционный сигнал, генерируемый путем восприятия магнитного поля первого магнита 30 посредством третьей рабочей поверхности c датчика Холла 50. Стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью c датчика Холла 50 в среде, в которой мобильный терминал 200 не подвергается воздействию внешнего магнитного поля.
Этап S2005: Определение, является ли абсолютная величина разности больше заданной опорной пороговой величины. Если да, осуществляется этап S2007. Если нет, осуществляется этап S2006.
Этап S2006: Управление приводным узлом 232 с целью приведения кронштейна в движение для перемещения во втором направлении, так что видеокамера 231 оказывается в отведенной назад позиции.
Этап S2007: Управление мобильным терминалом 200 для передачи информации подсказки.
Следует отметить, что, для краткости описания, приведенные выше варианты способа представлены в виде комбинации ряда действий. Однако, специалист в рассматриваемой области должен понимать, что настоящая заявка не ограничивается описываемым здесь порядком действий, поскольку согласно настоящей заявке некоторые этапы могут быть выполнены в другом порядке или одновременно.
Описания каждого приведенных выше вариантов сосредоточены на различных моментах. Информацию о частях, которые не были рассмотрены подробно в каком-то одном из вариантов, можно найти в соответствующих описаниях других вариантов.
Последовательность этапов способа в вариантах настоящей заявки можно изменять, можно комбинировать или исключать какие-то этапы на основе фактических требований.
Способ определения положения, предлагаемый в настоящем описании, может быть осуществлен посредством аппаратуры или встроенного программного обеспечения, либо может быть реализован в виде загружаемого программного обеспечения или компьютерного кода, который может быть сохранен на читаемом компьютером носителе для хранения информации, таком как постоянное запоминающее устройство (ПЗУ (Read-Only Memory, ROM)), запоминающее устройство с произвольной выборкой (ЗУПВ (Random Access Memory, RAM)), гибкий диск, жесткий диск или магнитооптический диск, либо может быть использован в виде компьютерного кода, первоначально сохраненного на удаленном носителе для записи информации или энергонезависимом машиночитаемом носителе, загружаемого через сеть связи и сохраняемого на локальном носителе для хранения информации. Поэтому предлагаемый здесь способ может быть представлен с использованием компьютера общего назначения, процессора специального назначения или загружаемого программного обеспечения, сохраняемого на носителе для записи информации в программируемой или специализированной аппаратуре, такой как специализированная интегральная схема (ASIC) или программируемая пользователем вентильная матрица (FPGA). Как понятно в технике, компьютер, процессор, микропроцессор, контроллер или программируемая аппаратура содержит запоминающий корпус, такой как ЗУПВ (RAM), ПЗУ (ROM) или флэш-память. Когда компьютер, процессор или аппаратура обращается к и выполняет программное обеспечение или компьютерный код для осуществления описываемого здесь способа обработки данных, запоминающий корпус может сохранять или принимать программное обеспечение или компьютерный код. В дополнение к этому, когда компьютер общего назначения обращается к коду для осуществления описываемых здесь процедур, выполнение этого кода трансформирует компьютер общего назначения в специализированный компьютер для выполнения описываемых здесь процедур.
Машиночитаемый носитель информации может представлять собой твердотельное запоминающее устройство, карту памяти, оптический диск или другой подобный корпус. Этот машиночитаемый читаемый компьютером носитель для хранения информации сохраняет программные команды. Компьютер, мобильный телефон, планшетный компьютер или мобильный терминал, как в настоящей заявке, вызывает эти команды для осуществления способа определения положения, показанного на Фиг. 16 – Фиг. 20.
Приведенное выше описание представляет варианты реализации настоящей заявки. Следует отметить, что даже рядовой специалист в рассматриваемой области может сделать ряд усовершенствований и уточнений, не отклоняясь от принципов вариантов настоящей заявки, так что эти усовершенствования и уточнения попадают в объем защиты настоящей заявки.
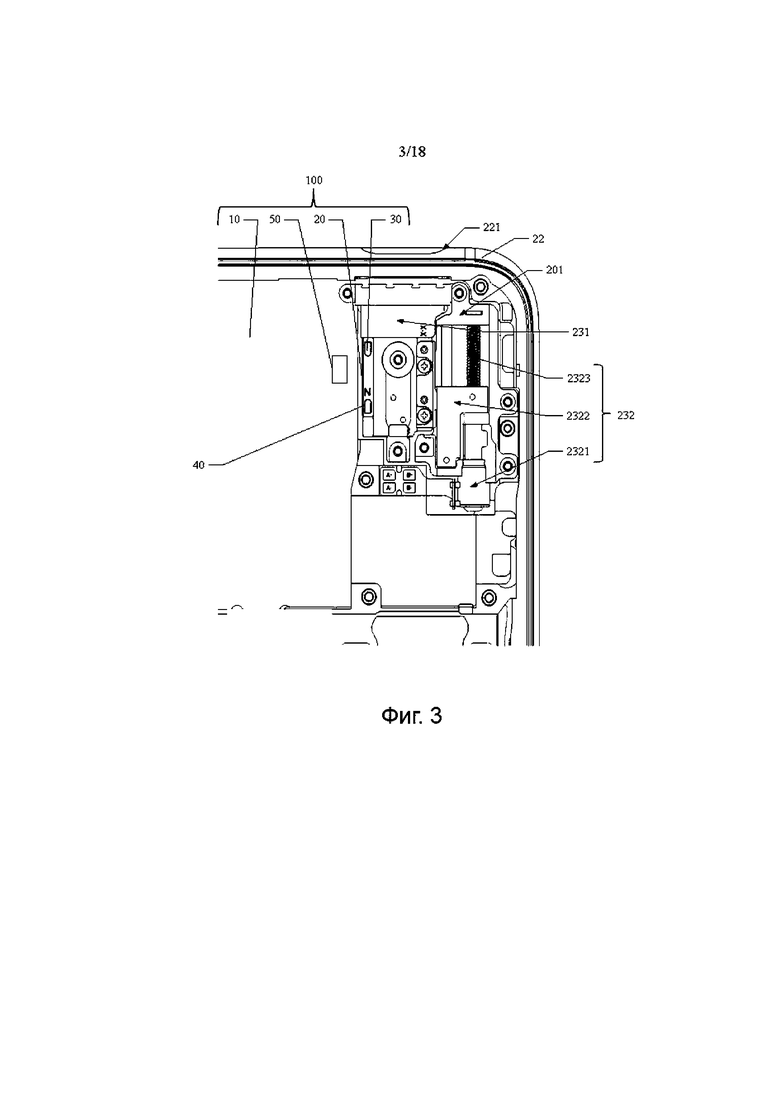
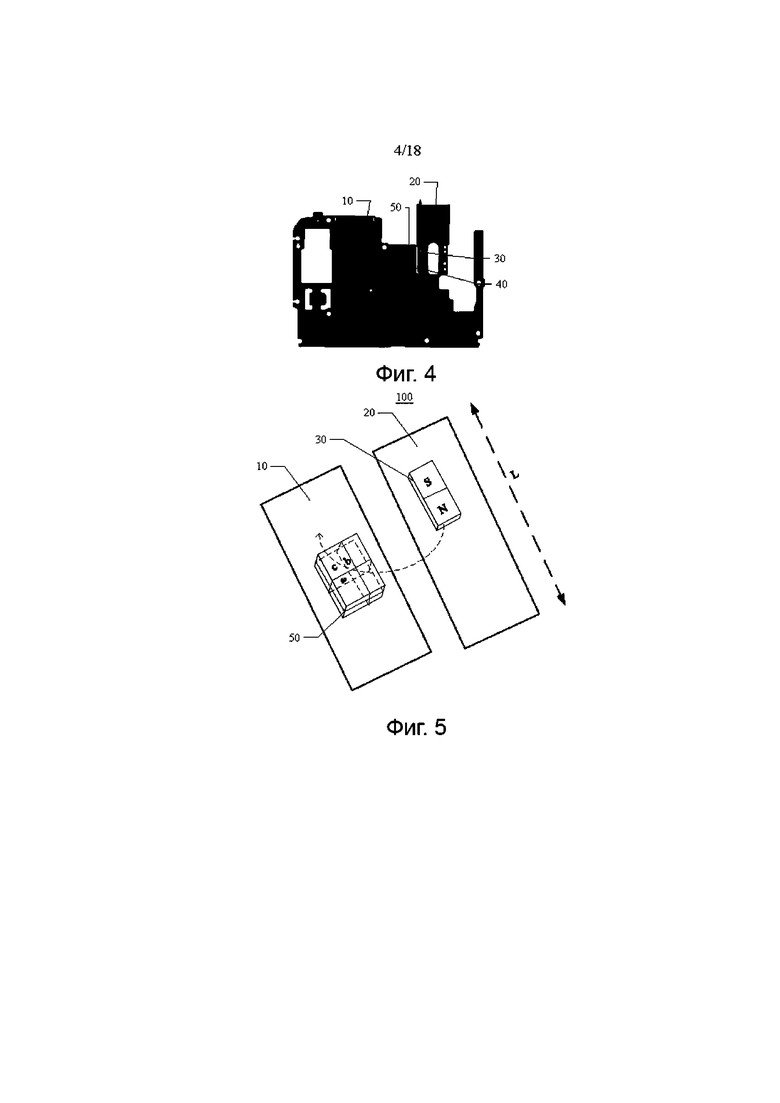
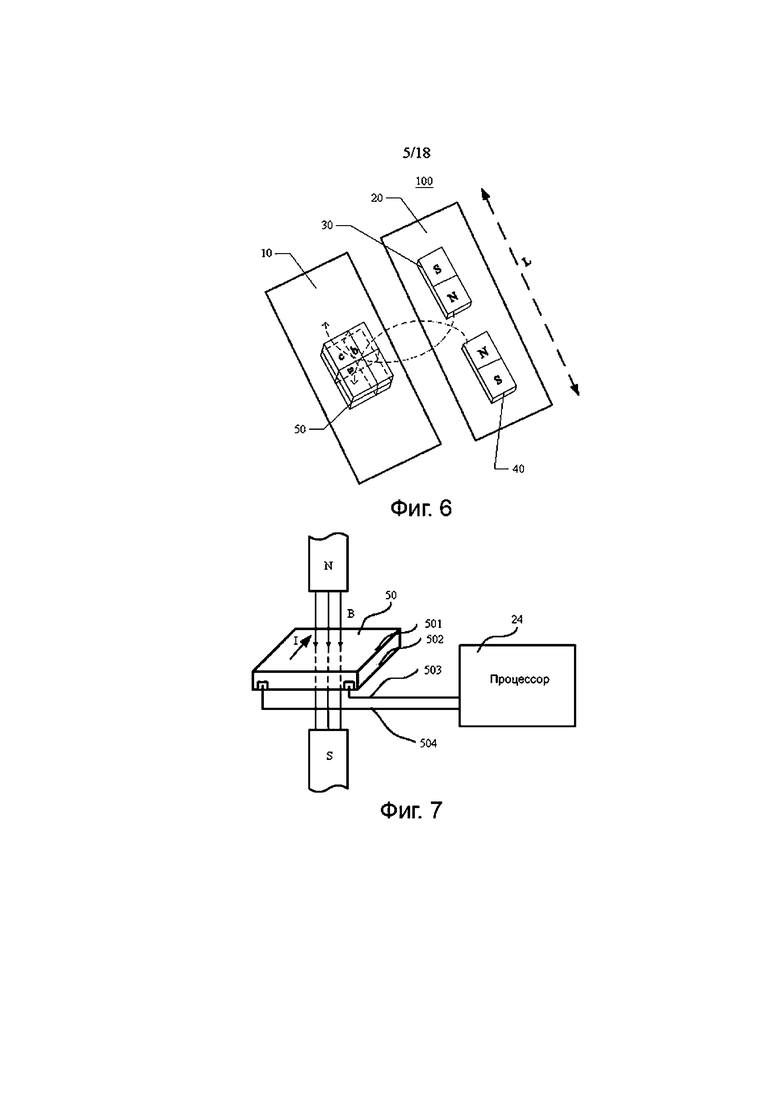
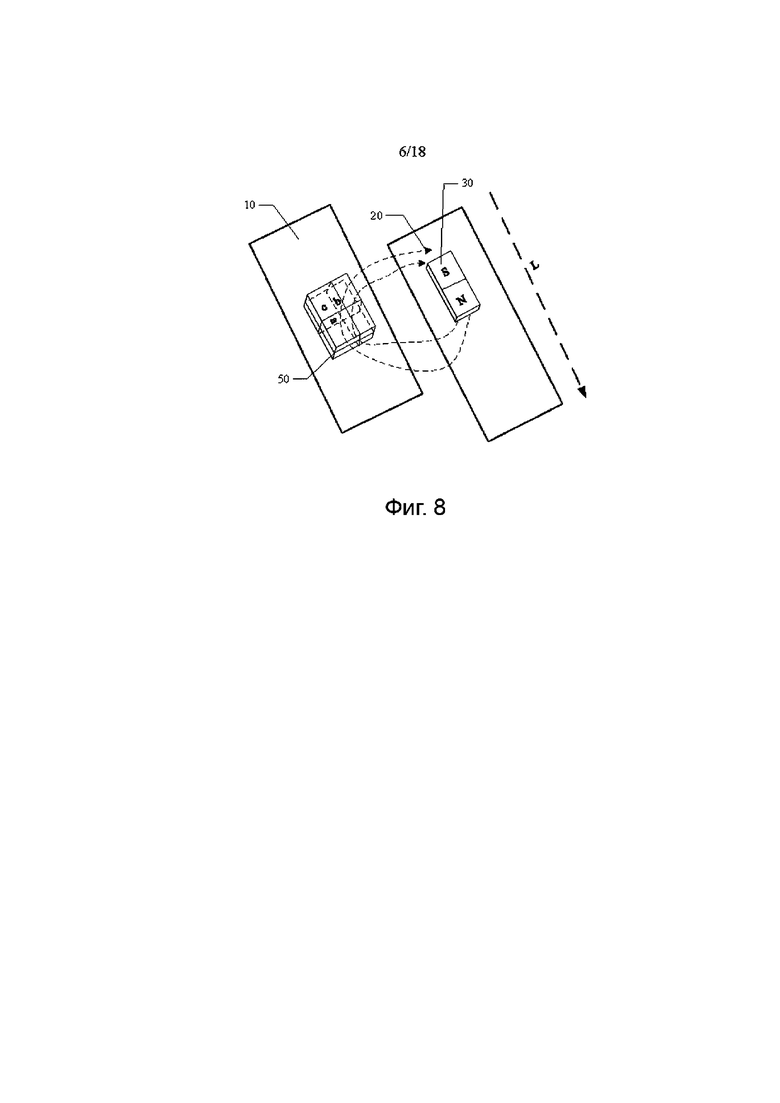
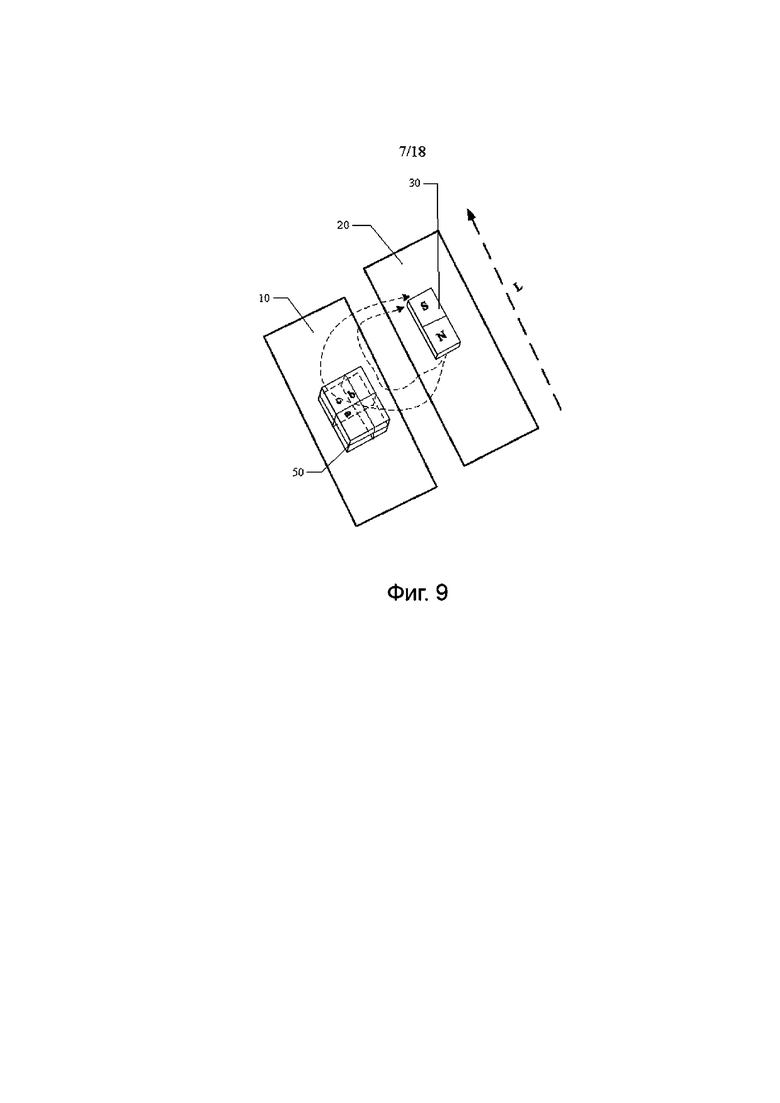
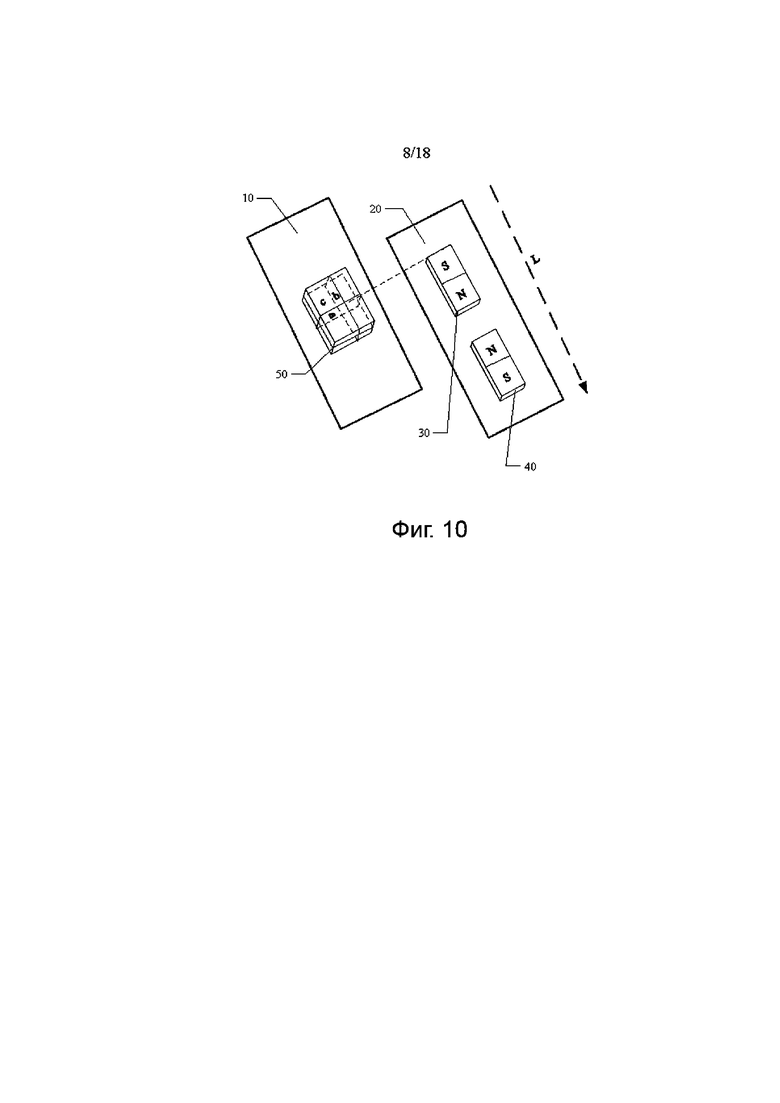
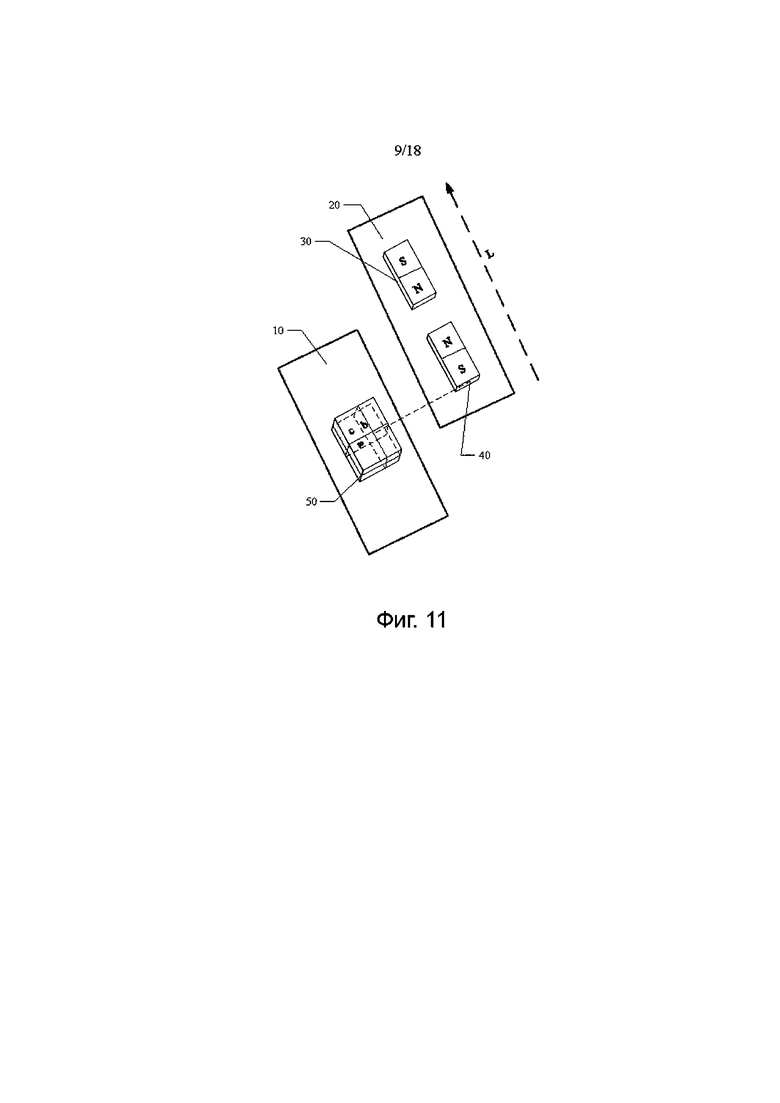
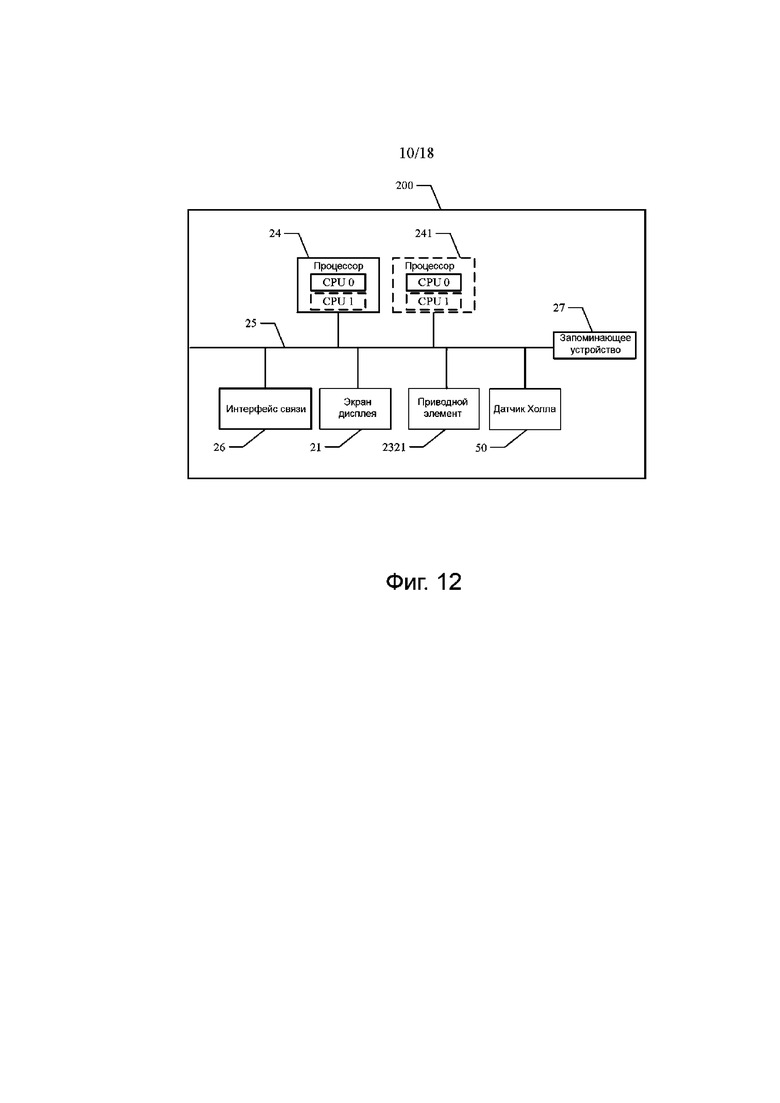
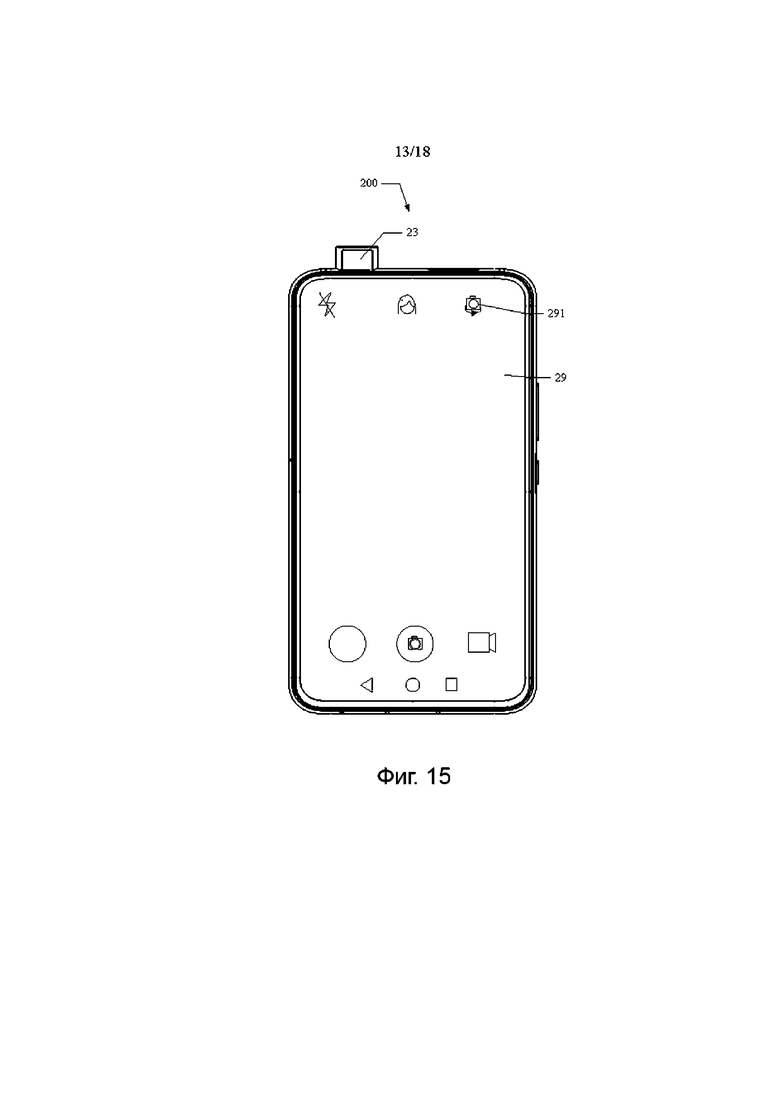
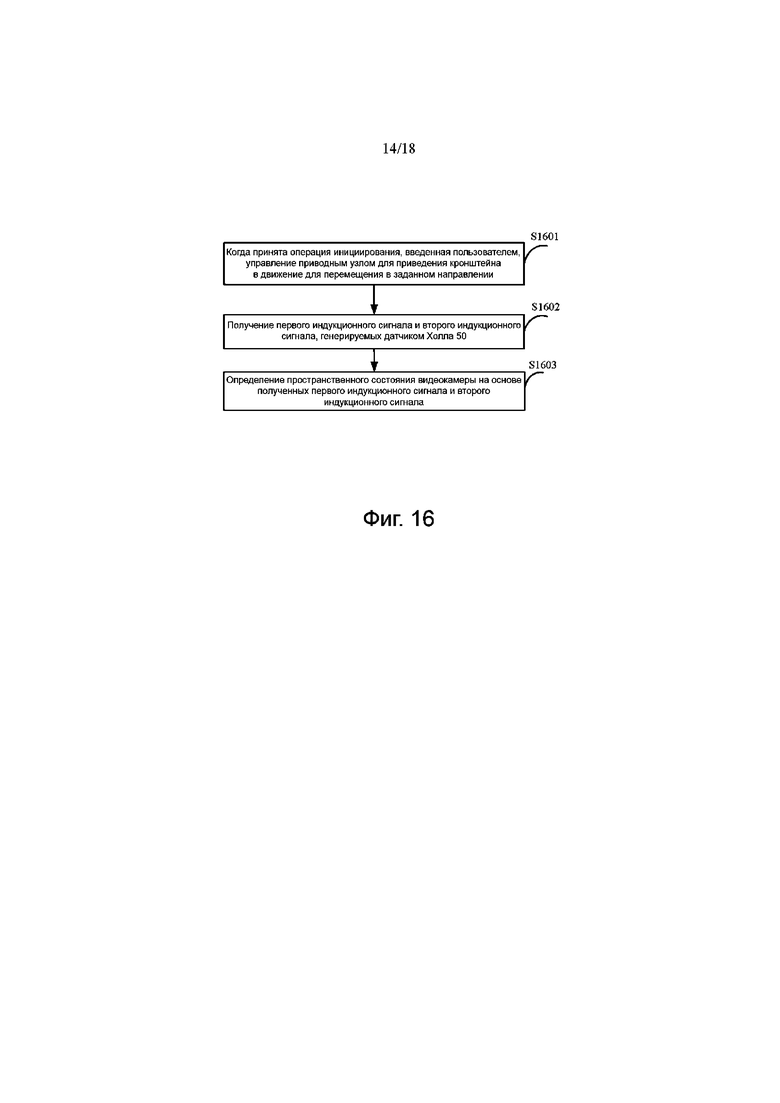
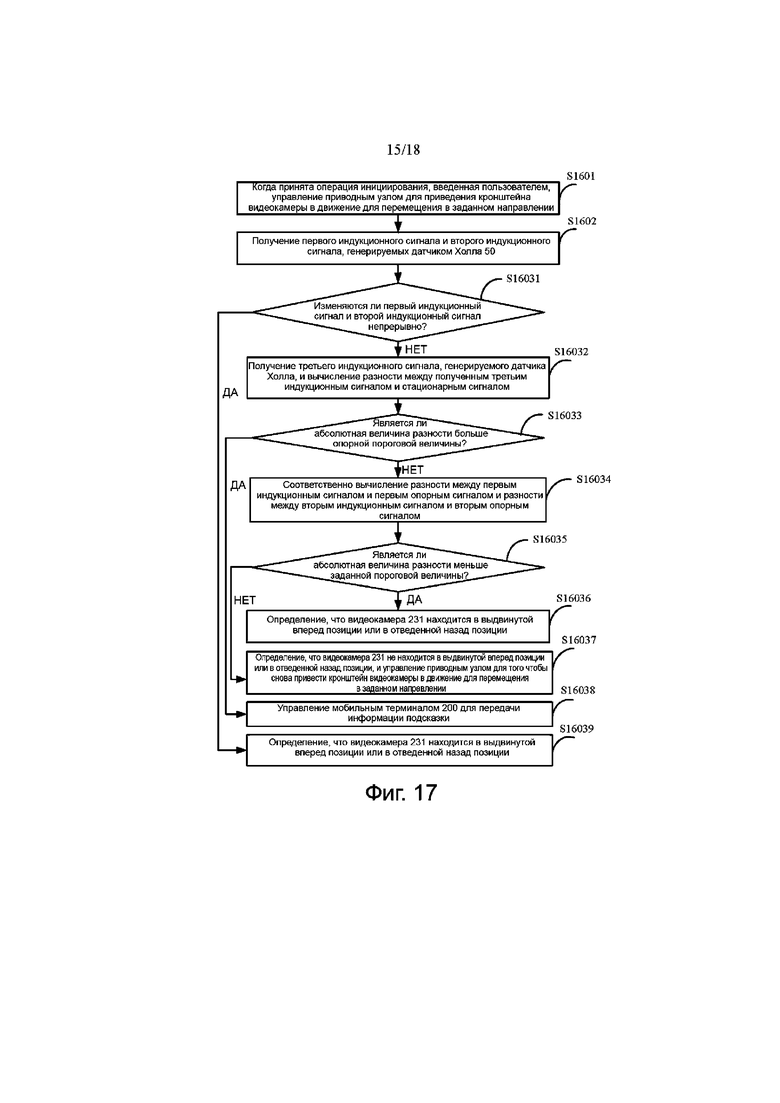
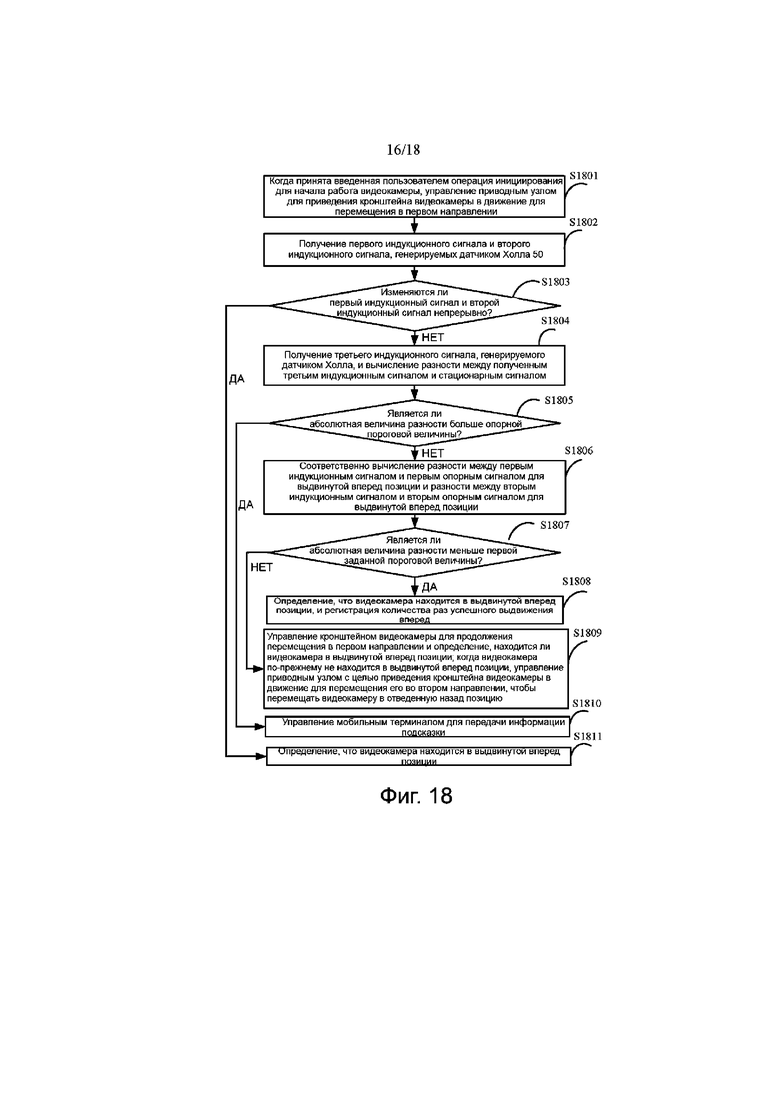
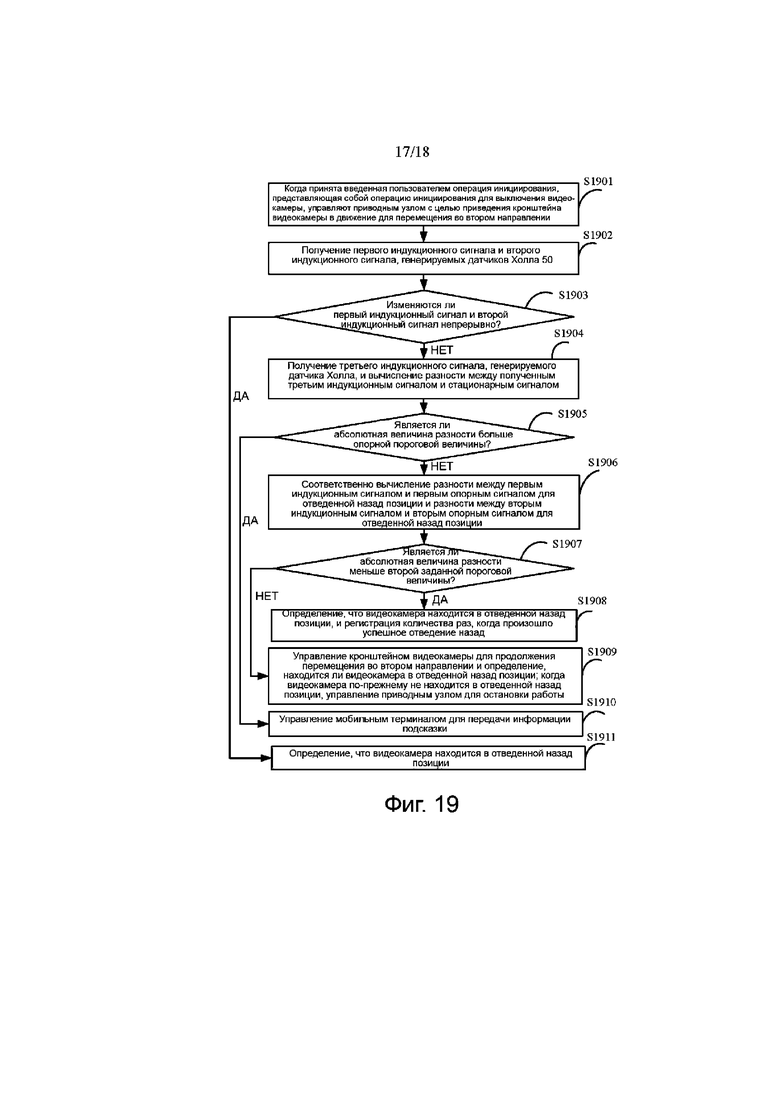
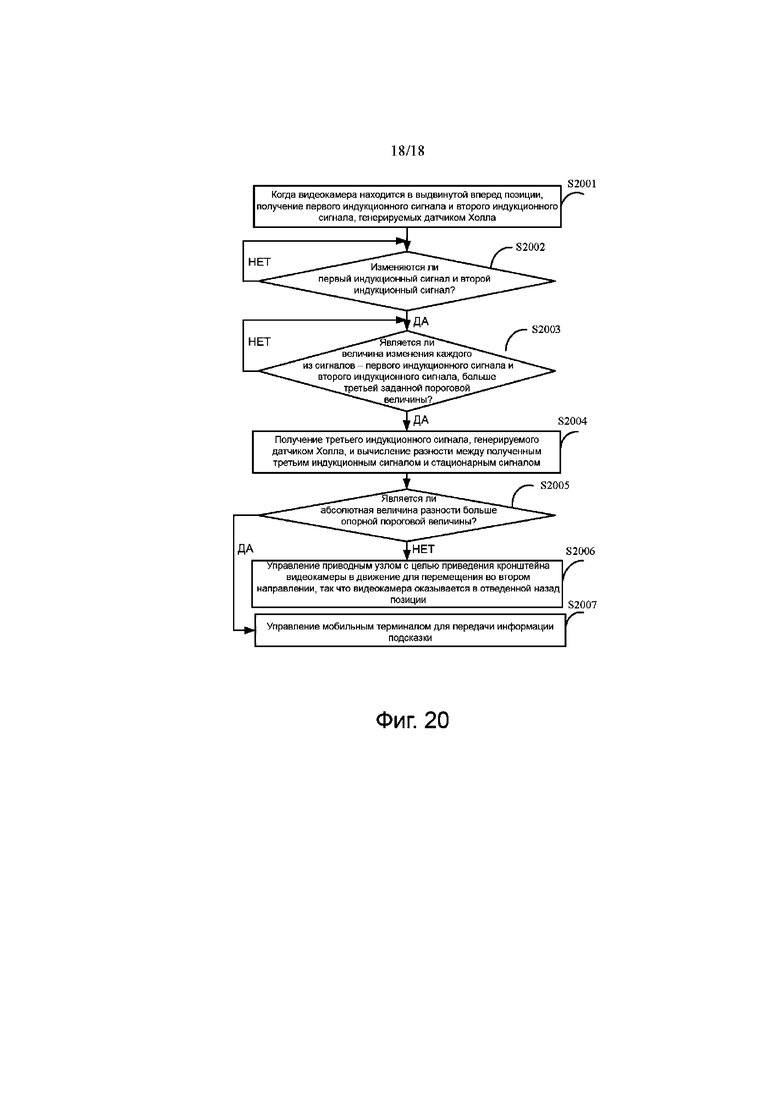
Изобретение относится к области конструктивных элементов мобильных устройств, а именно к механизму для определения положения видеокамеры относительно мобильного терминала, расположенному во внутреннем пространстве корпуса. Техническим результатом является повышение точности определения положения видеокамерного устройства мобильного терминала, а именно положения телескопического механизма и его состояния для обеспечения лучших условий и качества видеосъемки и защиты видеокамерного устройства. Для этого механизм для определения положения содержит печатную плату, кронштейн, первый магнит и датчик Холла; видеокамера мобильного терминала установлена на кронштейне, и эта видеокамера может выдвигаться вперед или отводиться назад во внутреннее пространство, образованное корпусом. Датчик Холла содержит первую рабочую поверхность и вторую рабочую поверхность, соответственно протяженные в разных направлениях, этот датчик Холла воспринимает магнитное поле первого магнита через первую рабочую поверхность и вторую рабочую поверхность и генерирует индукционные сигналы, и эти индукционные сигналы используются для определения выдвинутой вперед позиции и отведенной назад позиции видеокамеры. В соответствии с настоящей заявкой датчик Холла воспринимает магнитное поле первого магнита для генерации двух индукционных сигналов, так что точность определения пространственного состояния видеокамеры может быть повышена. 3 н. и 28 з.п. ф-лы, 20 ил.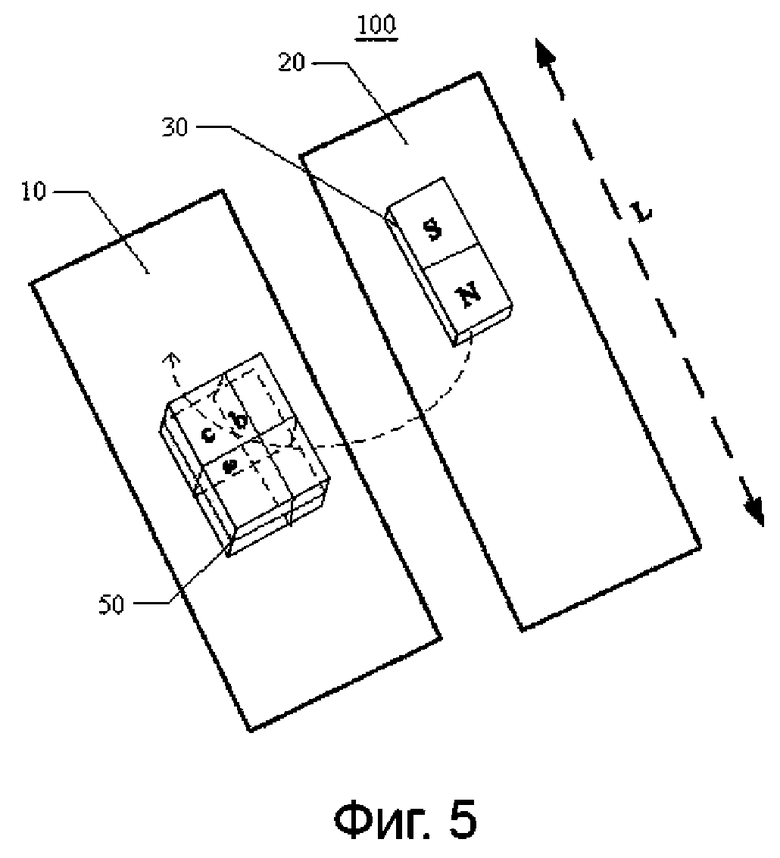
1. Механизм определения положения, содержащий:
первый корпус;
второй корпус, расположенный пространственно удаленно от первого корпуса и выполненный с возможностью перемещения относительно первого корпуса;
первый магнит, установленный на втором корпусе; и
датчик Холла, расположенный на первом корпусе и содержащий первую рабочую поверхность и вторую рабочую поверхность соответственно, протяженные в разных направлениях.
2. Механизм определения положения по п. 1, в котором направления перемещения первой рабочей поверхности и второго корпуса по существу перпендикулярны одно другому, вторая рабочая поверхность по существу перпендикулярна первой рабочей поверхности и обе эти поверхности – первая рабочая поверхность и вторая рабочая поверхность - по существу перпендикулярны поверхности первого корпуса, на котором установлен датчик Холла.
3. Механизм определения положения по п. 1 или 2, в котором датчик Холла дополнительно содержит третью рабочую поверхность, направление протяженности которой отличается от направлений протяженности обеих поверхностей из первой рабочей поверхности и второй рабочей поверхности.
4. Механизм для определения положения по п. 3, отличающийся тем, что третья рабочая поверхность по существу перпендикулярна первой рабочей поверхности и второй рабочей поверхности по отдельности.
5. Механизм определения положения по п. 1, дополнительно содержащий второй магнит, при этом второй магнит и первый магнит являются пространственно удаленными от второго корпуса.
6. Механизм определения положения по п. 5, в котором соединительная прямая между центральной точкой первого магнита и центральной точкой второго магнита по существу параллельна направлению перемещения второго корпуса.
7. Механизм определения положения по п. 6, в котором ось север-юг первого магнита и ось север-юг второго магнита по существу параллельны направлению перемещения второго корпуса по отдельности.
8. Механизм определения положения по п. 7, в котором смежные концы первого магнита и второго магнита имеют одинаковую полярность.
9. Мобильный терминал, содержащий экран дисплея, корпус и устройство видеокамеры, при этом экран дисплея установлен на корпусе; корпус имеет отверстие и сообщающееся с указанным отверстием внутреннее пространство, куда помещено указанное устройство видеокамеры; причем мобильный терминал дополнительно содержит механизм определения положения, расположенный во внутреннем пространстве корпуса; при этом механизм определения положения содержит печатную плату, кронштейн, первый магнит и датчик Холла; устройство видеокамеры содержит видеокамеру и приводной узел; видеокамера установлена на кронштейне, а приводной узел соединен с кронштейном для приведения кронштейна в движение для перемещения видеокамеры в выдвинутую вперед позицию или в отведенную назад, в корпус, позицию; датчик Холла установлен на печатной плате, причем датчик Холла содержит первую рабочую поверхность и вторую рабочую поверхность, соответственно протяженные в разных направлениях.
10. Мобильный терминал по п. 9, в котором направление перемещения первой рабочей поверхности и кронштейна по существу перпендикулярны одно другому, вторая рабочая поверхность и первая рабочая поверхность по существу перпендикулярны одна другой и вторая рабочая поверхность и первая рабочая поверхность обе по существу перпендикулярны поверхности печатной платы, обращенной к экрану дисплея.
11. Мобильный терминал по п. 9 или 10, в котором датчик Холла дополнительно содержит третью рабочую поверхность, направление протяженности которой отличается от направлений протяженности обеих поверхностей из первой рабочей поверхности и второй рабочей поверхности.
12. Мобильный терминал по п. 11, в котором третья рабочая поверхность по существу параллельна поверхности печатной платы, обращенной к экрану дисплея.
13. Мобильный терминал по п. 12, в котором механизм определения положения дополнительно содержит второй магнит, второй магнит и первый магнит расположены пространственно удаленно на кронштейне.
14. Мобильный терминал по п. 13, в котором соединительная прямая, проходящая между центральной точкой первого магнита и центральной точкой второго магнита, по существу параллельна направлению перемещения кронштейна.
15. Мобильный терминал по п. 14, в котором ось север-юг первого магнита и ось север-юг второго магнита по существу параллельны направлению перемещения кронштейна по отдельности.
16. Мобильный терминал по п. 15, в котором смежные концы первого магнита и второго магнита имеют одинаковую полярность.
17. Мобильный терминал по п. 9, в котором приводной узел содержит ведущий элемент, адаптер и ходовой винт; один конец адаптера жестко соединен с кронштейном, а другой конец адаптера имеет вращательное соединение с ходовым винтом; причем ходовой винт дополнительно имеет вращательное соединение с ведущим элементом; ведущий элемент может приводить ходовой винт во вращение, так что адаптер приводит кронштейн в движение и видеокамера выдвигается из корпуса вперед или отводится внутрь корпуса назад через указанное отверстие.
18. Мобильный терминал по п. 9, дополнительно содержащий процессор, электрически соединенный с приводным узлом и датчиком Холла; причем, когда принята введенная пользователем операция инициирования, процессор выполнен с возможностью управления приводным узлом для приведения кронштейна в движение и этот процессор далее получает первый индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита посредством первой рабочей поверхности датчика Холла, и второй индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита посредством второй рабочей поверхности датчика Холла, и определяет пространственное состояние видеокамеры на основе первого индукционного сигнала и второго индукционного сигнала.
19. Мобильный терминал по п. 11, в котором мобильный терминал дополнительно содержит процессор, электрически соединенный с приводным узлом и с датчиком Холла; процессор далее получает третий индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита посредством третьей рабочей поверхности датчика Холла, и определяет на основе полученного третьего индукционного сигнала, подвергается ли мобильный терминал помехам со стороны внешнего магнитного поля.
20. Способ определения положения, реализуемый в мобильном терминале, причем мобильный терминал содержит корпус, печатную плату, кронштейн и видеокамерное устройство; печатная плата, кронштейн и видеокамерное устройство расположены в корпусе; корпус имеет отверстие и сообщающееся с этим отверстием внутреннее пространство, куда помещено видеокамерное устройство; при этом видеокамерное устройство содержит видеокамеру и приводной узел, видеокамера установлена на кронштейне, а приводной узел соединен с кронштейном; на печатной плате смонтирован датчик Холла, а на кронштейне установлен первый магнит; при этом способ содержит этапы, на которых:
осуществляют управление, когда принята введенная пользователем операция инициирования, приводным узлом для приведения кронштейна в движение для перемещения в заданном направлении;
получают первый индукционный сигнал и второй индукционный сигнал, генерируемые датчиком Холла, причем первый индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита посредством первой рабочей поверхности датчика Холла, а второй индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита посредством второй рабочей поверхности датчика Холла; и
определяют пространственное состояние видеокамеры на основе полученных первого индукционного сигнала и второго индукционного сигнала, причем пространственное состояние видеокамеры может представлять собой выдвинутую вперед позицию и отведенную назад позицию.
21. Способ определения положения по п. 20, в котором этап определения пространственного состояния видеокамеры на основе получения первого индукционного сигнала и второго индукционного сигнала содержит подэтапы, на которых:
определяют, изменяются ли первый индукционный сигнал и второй индукционный сигнал непрерывно;
когда первый индукционный сигнал и второй индукционный сигнал более не изменяются, соответственно вычисляют разность между первым индукционным сигналом и первым опорным сигналом и разность между вторым индукционным сигналом и вторым опорным сигналом, где указанные первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые посредством первой рабочей поверхности и второй рабочей поверхности датчика Холла, когда видеокамера находится в выдвинутой вперед позиции; или первый опорный сигнал и второй опорный сигнал представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции; и
определяют, является ли абсолютная величина разности меньше заданной пороговой величины;
определяют, когда абсолютная величина разности меньше заданной пороговой величины, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции.
22. Способ определения положения по п. 21, дополнительно содержащий этапы, на которых:
когда первый индукционный сигнал и второй индукционный сигнал изменяются непрерывно, определяют, что видеокамера находится в процессе выдвижения вперед к указанной выдвинутой вперед позиции; или определяют, что видеокамера находится в процессе отведения назад к указанной отведенной назад позиции.
23. Способ определения положения по п. 21, дополнительно содержащий, до этапа вычисления соответствующих разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным, этапы, на которых:
получают третий индукционный сигнал, генерируемый датчиком Холла, и вычисляют разность между полученным третьим индукционным сигналом и стационарным сигналом, где третий индукционный сигнал представляет собой индукционный сигнал, генерируемый в результате восприятия магнитного поля первого магнита третьей рабочей поверхностью датчика Холла, и стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, в которой мобильный терминал не подвергается воздействию внешнего магнитного поля; и
определяют, является ли абсолютная величина разности больше опорной пороговой величины;
когда абсолютная величина разности не больше опорной пороговой величины, соответственно вычисляют разность между первым индукционным сигналом и первым опорным сигналом и разность между вторым индукционным сигналом и вторым опорным сигналом.
24. Способ определения положения по п. 23, дополнительно содержащий этап, на котором
управляют, когда абсолютная величина указанной разности больше опорной пороговой величины, мобильным терминалом для передачи информации подсказки.
25. Способ определения положения по п. 21, в котором введенная пользователем операция инициирования представляет собой операцию инициирования для начала работы видеокамеры; первый опорный сигнал представляет собой первый опорный сигнал для выдвинутой вперед позиции, а второй опорный сигнал представляет собой второй опорный сигнал для выдвинутой вперед позиции; заданная пороговая величина представляет собой первую заданную пороговую величину; первый опорный сигнал для выдвинутой вперед позиции и второй опорный сигнал для выдвинутой вперед позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в выдвинутой вперед позиции;
процедура управления, когда принята введенная пользователем операция инициирования, приводным узлом с целью приведения кронштейна в движение для перемещения в заданном направлении содержит: когда принята введенная пользователем операция инициирования для начала работы видеокамеры, управление приводным узлом с целью приведения кронштейна в движение для перемещения в первом направлении;
соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным сигналом содержит: соответственно вычисление разности между первым индукционным сигналом и первым опорным сигналом для выдвинутой вперед позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для выдвинутой вперед позиции;
этап определения, является ли абсолютная величина разности меньше заданной пороговой величины, содержит: определение, является ли абсолютная величина разности меньше первой заданной пороговой величины; а
этап определения, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции, когда абсолютная величина разности меньше заданной пороговой величины, содержит: определение, когда абсолютная величина разности меньше первой заданной пороговой величины, что видеокамера находится в выдвинутой вперед позиции.
26. Способ определения положения по п. 21 или 25, в котором введенная пользователем операция инициирования представляет собой операцию инициирования для выключения видеокамеры; первый опорный сигнал дополнительно представляет собой первый опорный сигнал для отведенной назад позиции, а второй опорный сигнал дополнительно представляет собой второй опорный сигнал для отведенной назад позиции; заданная пороговая величина дополнительно представляет собой вторую заданную пороговую величину; первый опорный сигнал для отведенной назад позиции и второй опорный сигнал для отведенной назад позиции представляют собой соответственно индукционные сигналы, генерируемые первой рабочей поверхностью и второй рабочей поверхностью датчика Холла, когда видеокамера находится в отведенной назад позиции;
этап управления, когда принята введенная пользователем операция инициирования, приводным узлом с целью приведения кронштейна в движение для перемещения в заданном направлении содержит: управление, когда принята введенная пользователем операция инициирования для выключения видеокамеры, приводным узлом для приведения кронштейна в движение для перемещения во втором направлении;
этап соответствующего вычисления разности между первым индукционным сигналом и первым опорным сигналом и разности между вторым индукционным сигналом и вторым опорным сигналом дополнительно содержит: соответствующее вычисление разности между первым индукционным сигналом и первым опорным сигналом для отведенной назад позиции и разности между вторым индукционным сигналом и вторым опорным сигналом для отведенной назад позиции;
этап определения, является ли абсолютная величина разности меньше заданной пороговой величины, дополнительно содержит: определение, является ли абсолютная величина разности меньше второй заданной пороговой величины; а
этап определения, что видеокамера находится в выдвинутой вперед позиции или в отведенной назад позиции, когда абсолютная величина разности меньше заданной пороговой величины, дополнительно содержит: определение, когда абсолютная величина разности меньше второй заданной пороговой величины, что видеокамера находится в отведенной назад позиции.
27. Способ определения положения по п. 25, дополнительно содержащий этап, на котором:
управляют, когда абсолютная величина разности не меньше первой заданной пороговой величины, кронштейном для продолжения перемещения в первом направлении, а этап определения, находится ли видеокамера в выдвинутой вперед позиции, когда видеокамера по-прежнему не находится в выдвинутой вперед позиции, содержит управление кронштейном для перемещения во втором направлении, так что видеокамера окажется в отведенной назад позиции.
28. Способ определения положения по п. 26, дополнительно содержащий этап, на котором:
управляют, когда абсолютная величина разности не меньше второй заданной пороговой величины, кронштейном для продолжения перемещения во втором направлении, а этап определения, находится ли видеокамера в отведенной назад позиции, когда видеокамера по-прежнему не находится в отведенной назад позиции, содержит управление приводным узлом для остановки работы.
29. Способ определения положения по п. 20 или 25, дополнительно содержащий этапы, на которых:
получают, когда видеокамера находится в выдвинутой вперед позиции, первый индукционный сигнал и второй индукционный сигнал, генерируемые датчиком Холла;
определяют, изменяются ли указанные первый индукционный сигнал и второй индукционный сигнал;
определяют, когда первый индукционный сигнал и второй индукционный сигнал изменяются, является ли величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины; и
управляют, когда величина изменения первого индукционного сигнала и второго индукционного сигнала больше третьей заданной пороговой величины, приводным узлом для приведения кронштейна в движение для перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции.
30. Способ определения положения по п. 29, дополнительно содержащий, до этапа управления приводным узлом для приведения кронштейна в движение для перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции, этапы, на которых:
получают третий индукционный сигнал, генерируемый датчиком Холла, и вычисляют разность между указанным третьим индукционным сигналом и стационарным сигналом, причем третий индукционный сигнал генерируют в результате восприятия магнитного поля первого магнита посредством третьей рабочей поверхности датчика Холла, а стационарный сигнал представляет собой индукционный сигнал, генерируемый третьей рабочей поверхностью датчика Холла в среде, в которой мобильный терминал не подвергается воздействию внешнего магнитного поля; и
определяют, является ли указанная абсолютная величина разности больше опорной пороговой величины;
причем, когда абсолютная величина разности не больше заданной пороговой величины, управляют приводным узлом для приведения кронштейна в движение для перемещения во втором направлении, так что видеокамера оказывается в отведенной назад позиции.
31. Способ определения положения по п. 30, дополнительно содержащий этап, на котором, когда указанная абсолютная величина разности больше опорной пороговой величины, управляют мобильным терминалом для генерирования информации подсказки.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| CN 108758232 A, 06.11.2018 | |||
| CN 108965660 A, 07.12.2018 | |||
| МОБИЛЬНЫЙ ТЕРМИНАЛ | 2007 |
|
RU2331132C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| CN 107197133 A, 22.09.2017 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

