Группа изобретений относится к комплексам автоматического регулирования дорожного движения с использованием нейросетевых архитектур и может быть применена в транспортной промышленности.
Известны комплекс для регулирования дорожного движения и способ регулирования дорожного движения, при этом комплекс включает систему для определения значений параметров транспортного потока и систему для регулирования дорожного движения, при этом система для определения значений параметров транспортного потока содержит видеодетекторы и сервер, содержащий нейронную сеть и подключенные к нему видеодетекторы, а система для регулирования дорожного движения содержит модуль адаптивного управления светофорами, подключенный к серверу, а способ заключается в получении изображения транспортного потока видеодетектором, передачу изображения транспортного потока на сервер, классификации сервером посредством нейронной сети объектов транспортного потока на изображении транспортного потока, определения значений параметров транспортного потока, передачи значений параметров транспортного потока на модуль адаптивного управления светофорами, которым осуществляется определение команд для светофоров с учетом значений этих параметров и передача команд на светофоры [CN 111696348 А, дата публикации: 22.09.2020 г. МПК: G08G 1/01; G08G 1/017; G08G 1/065].
Недостатком известного технического решения является низкая отказоустойчивость и высокие требования к аппаратной мощности сервера системы для определения значений параметров транспортного потока из-за высокой операционной нагрузки при обработки нейронной сетью на сервере большого объема графических данных, поступающих с множества видеодетекторов, вследствие чего возможен не только выход из строя сервера системы и потеря возможности управления светофорами, который может привести к затруднению движения транспортных потоков, но и усложнение масштабирования комплекса для регулирования дорожного движения.
В качестве прототипа выбраны комплекс для регулирования дорожного движения и способ регулирования дорожного движения, при этом комплекс включает систему для определения значений параметров транспортного потока и систему для регулирования дорожного движения, при этом система для определения значений параметров транспортного потока содержит видеодетекторы, а система для регулирования дорожного движения содержит модуль адаптивного управления светофорами, при этом способ заключается в получении изображения транспортного потока видеодетектором, классификации видеодетектором с использованием нейронной сети объектов транспортного потока на изображении транспортного потока, определения значений параметров транспортного потока, передачи значений параметров транспортного потока на модуль адаптивного управления светофорами, определения им команд для светофоров с учетом значений этих параметров и передачи команд на светофоры [CN 111862632 А, дата публикации: 30.10.2020 г. МПК: G08G 1/01; G08G 1/042; G08G 1/065].
Преимуществом прототипа перед известным техническим решением является высокая отказоустойчивость системы для определения значений параметров транспортного потока за счет распределения операционной нагрузки, необходимой для обработки графических данных, между видеодетекторами, каждый из которых имеет собственную компактную нейронную сеть для обработки полученного им изображения транспортного потока, вследствие чего, при выходе одного или нескольких видеодетекторов из строя возможно дальнейшее исправное функционирование комплекса.
Однако недостатком прототипа является низкая точность определения значений параметров транспортного потока видеодетектором из-за того, что нейронной сетью, обеспечивающей классификацию на изображении объектов транспортного потока, не учитывается ракурс, при котором установлен видеодетектор, получающий вышеупомянутое изображение транспортного потока, а также не учитываются возможные специфические особенности, возникающие при изменении климатических условий и смене освещенности и времен года. Вследствие этого нейронная сеть видеодетектора требует постоянного переобучения для учитывания всех специфических особенностей, либо для ее эффективной работы и самостоятельного переобучения для учитывания всех специфических особенностей требуются высокие аппаратные возможности, что в первом случае увеличивает трудоемкость обслуживания системы, поскольку видеопоток необходимо вручную разобрать на отдельные кадры и также вручную разметить от 30 000 до 100 000 кадров, а во втором случае - существенно повышает громоздкость и стоимость видеодетектора и затрудняет его монтаж на светофорных или фонарных столбах.
Указанные недостатки приводят к возникновению неточностей при классификации нейронной сетью объектов транспортного потока, что напрямую влияет на полученные конечные значения параметров транспортного потока и на команды, отправляемые на светофоры модулем адаптивного управления светофорами, что снижает качество регулирования дорожного движения и требует разработки такого решения, которое при исключении необходимости увеличения аппаратных возможностей видеодетекторов позволяло бы учитывать все вышеперечисленные специфические особенности, влияющие на точность классификации нейронной сетью видеодетектора объектов транспортного потока на изображении транспортного потока и на конечную точность значений параметров транспортного потока, снижающих точность выбора команд для светофоров и ухудшающих эксплуатационные характеристики комплекса для регулирования дорожного движения.
Техническая проблема, на решение которой направлена группа изобретений, заключается в улучшении эксплуатационных характеристик комплекса для регулирования дорожного движения.
Технический результат, на достижение которого направлена группа изобретений, заключается в повышении точности классификации видеодетектором объектов транспортного потока на изображении транспортного потока с сопутствующим повышением точности определения видеодетектором значений параметров транспортного потока при исключении необходимости увеличения аппаратных возможностей видеодетектора, и повышении точности определения команд для средств регулирования дорожного движения модулем адаптивного управления средствами регулирования дорожного движения.
Сущность первого изобретения из группы изобретений заключается в следующем.
Комплекс для регулирования дорожного движения содержит выполненные с возможностью обмена данными систему для определения значений параметров транспортного потока и систему для регулирования дорожного движения, при этом система для определения значений параметров транспортного потока содержит видеодетекторы, каждый из которых выполнен с возможностью получения изображения транспортного потока, а также классификации объектов транспортного потока на изображении транспортного потока и определения значений параметров транспортного потока с использованием нейронной сети, а система для регулирования дорожного движения содержит модуль адаптивного управления средствами регулирования дорожного движения, выполненный с возможностью получения значений параметров транспортного потока от видеодетектора, определения команды для средств регулирования дорожного движения с учетом значений этих параметров и передачи команды на электронные средства регулирования дорожного движения. В отличие от прототипа система для определения значений параметров транспортного потока содержит сервер, выполненный с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки полученного от видеодетектора изображения транспортного потока с использованием нейронной сети и корректировки используемой в видеодетекторе нейронной сети с учетом обработанного изображения транспортного потока.
Сущность второго изобретения из группы изобретений заключается в следующем.
Система для определения значений параметров транспортного потока комплекса для регулирования дорожного движения включает видеодетектор, выполненный с возможностью получения изображения транспортного потока, и содержащий микроконтроллер, которой снабжен нейронной сетью, обеспечивающей возможность классификации объектов транспортного потока на изображении транспортного потока и определения значений параметров транспортного потока. В отличие от прототипа система содержит сервер, выполненный с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки центральным процессором полученного от видеодетектора изображения с использованием нейронной сети и внесения корректировки в используемую в микроконтроллере видеодетектора нейронную сеть с учетом обработанного изображения транспортного потока.
Сущность третьего изобретения из группы изобретений заключается в следующем.
Способ регулирования дорожного движения включает определение значений параметров транспортного потока системой для определения значений параметров транспортного потока, в процессе которого видеодетектором осуществляется получение изображения транспортного потока, а затем, с использованием нейронной сети, осуществляется классификация объектов транспортного потока на изображении транспортного потока и определение значений параметров транспортного потока, после чего системой для регулирования дорожного движения, посредством модуля адаптивного управления средствами регулирования дорожного движения, осуществляется получение значений параметров транспортного потока от видеодетектора, определение команд для средств регулирования дорожного движения с учетом значений параметров транспортного потока и передача команд на средства регулирования дорожного движения. В отличие от прототипа сервером системы для определения значений параметров транспортного потока осуществляется подключение к видеодетектору, после чего осуществляется получение изображения транспортного потока от видеодетектора, затем полученное изображение обрабатывается сервером с использованием нейронной сети, содержащейся в его внутренней памяти, после чего сервером, с учетом обработанного изображения транспортного потока, корректируется используемая видеодетектором нейронная сеть.
Сущность четвертого изобретения из группы изобретений заключается в следующем.
Этап определения значений параметров транспортного потока способа регулирования дорожного движения включает получение изображения транспортного потока видеодетектором, классификацию микроконтроллером видеодетектора объектов транспортного потока на изображении транспортного потока и определение значений параметров транспортного посредством нейронной сети, содержащейся в микроконтроллере. В отличие от прототипа сервером системы для определения значений параметров транспортного потока осуществляется подключение к видеодетектору, осуществляется получение изображения транспортного потока от виде о детектора, после чего центральным процессором сервера осуществляется обработка полученного от микроконтроллера изображения с использованием нейронной сети, содержащейся во внутренней памяти сервера и затем, с учетом обработанного изображения транспортного потока, сервером корректируется используемая микроконтроллером нейронная сеть.
Видеодетектор представляет собой установленные в один или в разные корпусы видеокамеру и микроконтроллер. Видеокамера обеспечивает возможность получения изображения транспортного потока. Микроконтроллер во внутренней памяти содержит нейронную сеть, основанную на математической модели, обеспечивающей возможность определения географических координат статичных и подвижных объектов транспортного потока в области зрения видеокамеры на изображении транспортного потока. Это позволяет получать данные о положении статичных и динамических объектов транспортного потока, скорости перемещения динамических объектов транспортного потока, расстоянии между объектами, типах объектов и их количестве и иные аналогичные данные с изображения транспортного потока и осуществлять их классификацию. Также микроконтроллер обеспечивает возможность определения значений параметров транспортного потока, среди которых могут быть представлены скорость движения объектов транспортного потока в одном из направлений, общих размерах совокупностей объектов, движущихся в одном направлении или в разных направлениях, интенсивности движения совокупностей объектов, количестве объектов одного типа и иных аналогичных параметров транспортного потока.
Сервер системы для определения значений параметров транспортного потока обеспечен высокой аппаратной возможностью, как минимум превышающей аппаратную возможность микроконтроллера видеодетектора. Это обеспечивает работоспособность нейронной сети на базе этого сервера, что позволяет ему обрабатывать полученное от микроконтроллера изображения транспортного потока. Нейронную сеть на сервере системы предварительно обучают на выборке, размеченной оператором и состоящей из массива изображений, полученных с видеодетекторов или видеокамер, установленных под разными ракурсами в разное время суток и года, а также при разных погодных условиях, размеченной оператором. На основе обучающей выборки и с задействованием высоких аппаратных возможностей такая нейронная сеть формирует математическую модель с весовыми коэффициентами для изображений транспортного потока, полученных от видеодетекторов. Затем математическая модель со сформированными весовыми коэффициентами для полученного от видеодетектора изображения под конкретным ракурсом его установки, в конкретное время суток и время года, а также при конкретных погодных условиях, передаются сервером на видеодетектор. На основе нее микроконтроллером вносятся корректировки в используемую нейронную сеть, в том числе может осуществляться полная замена математической модели, лежащей в основе нейронной сети. Это обеспечивает возможность повышения точности классификации видеодетектором объектов транспортного потока на изображении транспортного потока, в том числе при любых ракурсах установки видеодетектора, в любое время суток и время года, а также при любых погодных условиях и повышает точность определения видеодетектором значений параметров транспортного потока, исключая необходимость увеличения аппаратных возможностей видеодетектора.
Модуль адаптивного управления электронными средствами регулирования дорожного движения обеспечивает возможность определения команд для электронных средств регулирования дорожного движения, в качестве которых могут быть представлены светофоры, электронные дорожные знаки, электронные указатели и иные средства регулирования дорожного движения. Модуль адаптивного управления может быть представлен в виде алгоритма и может быть реализован на базе сервера системы для определения значений параметров транспортного потока или на собственном сервере. При этом в системе может быть представлен один модуль, обеспечивающий определение команд для всех электронных средств регулирования дорожного движения, либо для каждого отдельного средства может содержаться отдельный модуль.
Определение команд для электронных средств регулирования дорожного движения может быть осуществлено за счет сравнения одного или совокупности значений параметров транспортного потока с базой данных команд и выбора одной или нескольких команд по полному или частичному соответствию значений одного или совокупностей параметров. Также определение команд модулем адаптивного управления может быть осуществлено за счет использования нейронной сети, предварительно обученной на выборке данных, содержащей значения параметров транспортного потока и выбранные команды для электронных средств регулирования дорожного движения. При этом для обучения нейронной сети может быть использован метод deep learning, что повышает точность определения команд для средств регулирования дорожного движения модулем адаптивного управления средствами регулирования дорожного движения. Также дополнительно определение команд для электронных средств регулирования дорожного движения может быть осуществлено с учетом значений параметров транспортного потока, полученных с подключенных к модулю адаптивного управления внешних источников данных, например: камер видеонаблюдения, данных телематики транспортных средств, средств геолокации общественного транспорта и др.
Группа изобретений может быть выполнена из известных материалов с помощью известных средств, что свидетельствует о ее соответствии критерию патентоспособности «промышленная применимость».
Группа изобретений характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, заключающейся в том, что система для определения значений параметров транспортного потока содержит сервер, выполненный с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки полученного от видеодетектора изображения транспортного потока с использованием нейронной сети и корректировки используемой в видеодетекторе нейронной сети с учетом обработанного изображения транспортного потока, что позволяет периодически задействовать высокие аппаратные возможности сервера для обработки изображений транспортного потока и создавать математическую модель с наиболее корректными весовыми коэффициентами, подходящими под определенный ракурс, время суток и года, а также под определенные погодные условия, при которых получает изображение видеодетектор, что позволяет видеодетектору более точно классифицировать статичные и динамические объекты транспортного потока без необходимости увеличения его аппаратной мощности и за счет этого получать более точные значения параметров транспортного потока, которые затем используются модулем адаптивного управления средствами регулирования дорожного движения для генерации команд.
Благодаря этому обеспечивается достижение технического результата, заключающегося в повышении точности классификации видеодетектором объектов транспортного потока на изображении транспортного потока с сопутствующим повышением точности определения видеодетектором значений параметров транспортного потока при исключении необходимости увеличения аппаратных возможностей видеодетектора, и повышении точности определения команд для средств регулирования дорожного движения модулем адаптивного управления средствами регулирования дорожного движения, тем самым улучшаются эксплуатационные характеристики комплекса для регулирования дорожного движения.
Группа изобретений обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о ее соответствии критерию патентоспособности «новизна».
Из уровня техники известны комплексы для регулирования дорожного движения, один из которых содержит сервер для определения значений параметров транспортного потока, использующий для этого нейронную сеть и имеющий высокую аппаратную мощность, а другой содержит видеодетектор с компактной нейронной сетью, обеспечивающий возможность определения значений параметров транспортного потокам при относительно невысоких аппаратных мощностях.
Однако из уровня техники не известен комплекс для регулирования дорожного движения, содержащий видеодетектор с компактной нейронной сетью, обеспечивающей возможность определения значений параметров транспортного потока и функционирующей на базе микроконтроллера, имеющего относительно невысокую аппаратную мощность, и сервер, имеющий высокую аппаратную мощность и содержащий обученной на большом объеме данных нейронную сеть, которая периодически анализирует изображения, полученные от видеодетекторов, и формирует новые наборы весовых коэффициентов под каждое полученное изображение и направляет их на видеодетектор, который впоследствии использует их для классификации объектов на изображении транспортного потока. Ввиду этого группа изобретений соответствует критерию патентоспособности «изобретательский уровень».
Изобретения из группы изобретений связаны между собой и образуют единый изобретательский замысел, который заключается в том, что система для определения значений параметров транспортного потока является частью комплекса для регулирования дорожного движения, а определение значений параметров транспортного потока является этапом способа регулирования дорожного движения, что свидетельствует о соответствии группы изобретений критерию патентоспособности «единство изобретения».
Группа изобретений поясняется следующими фигурами.
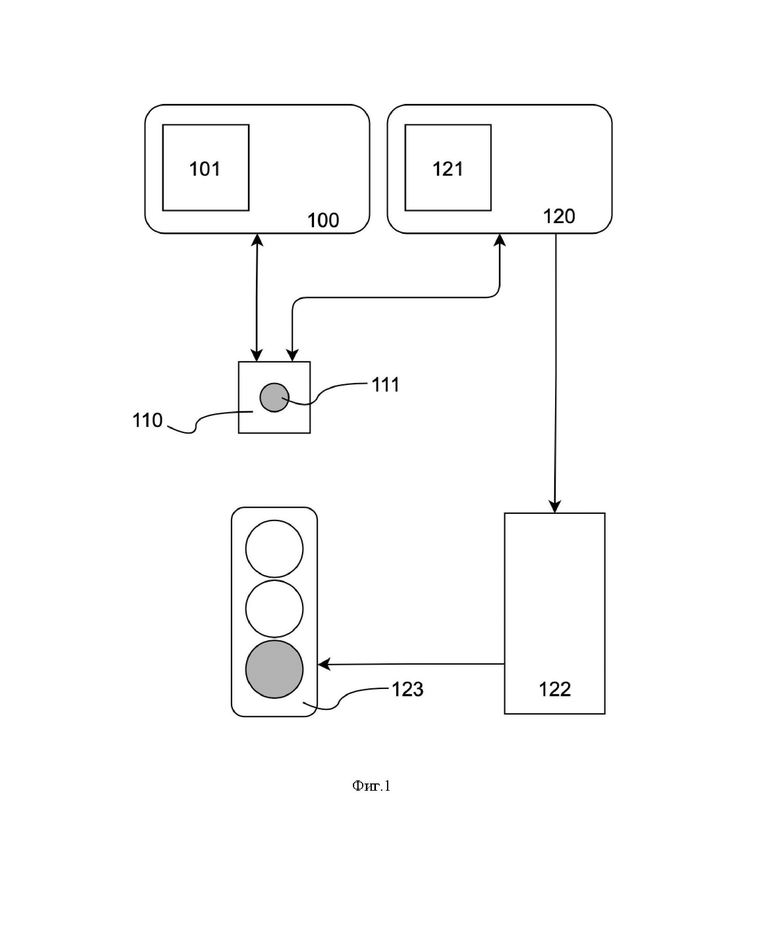
Фиг. 1 - Функциональная схема комплекса для регулирования дорожного движения.
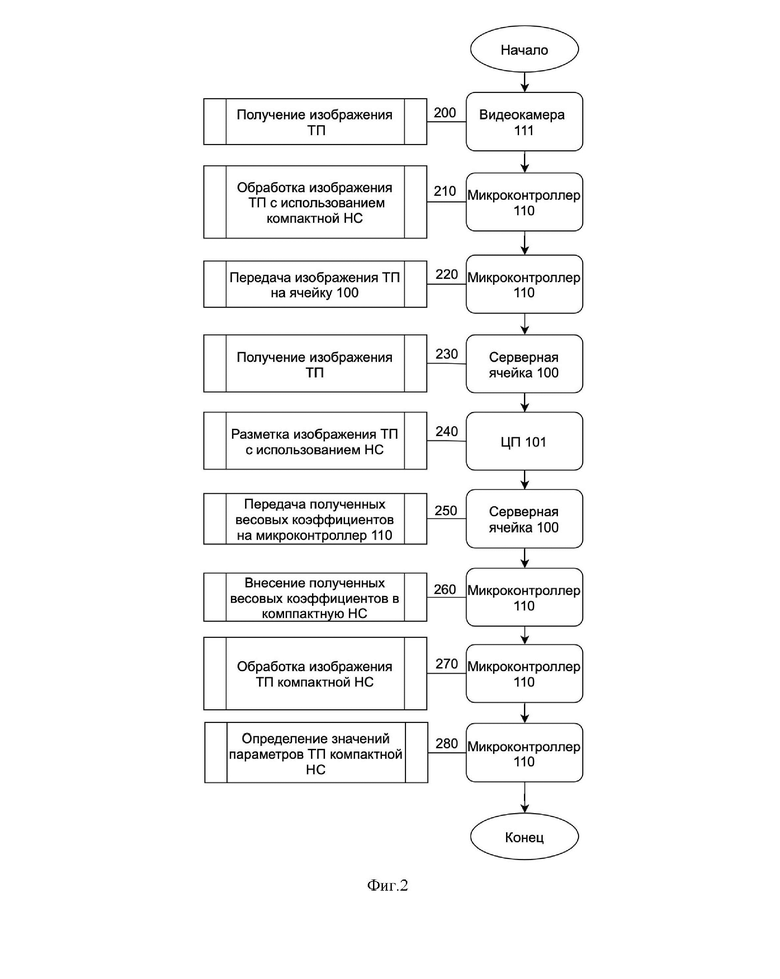
Фиг. 2 - Алгоритм определения значений параметров транспортного потока.
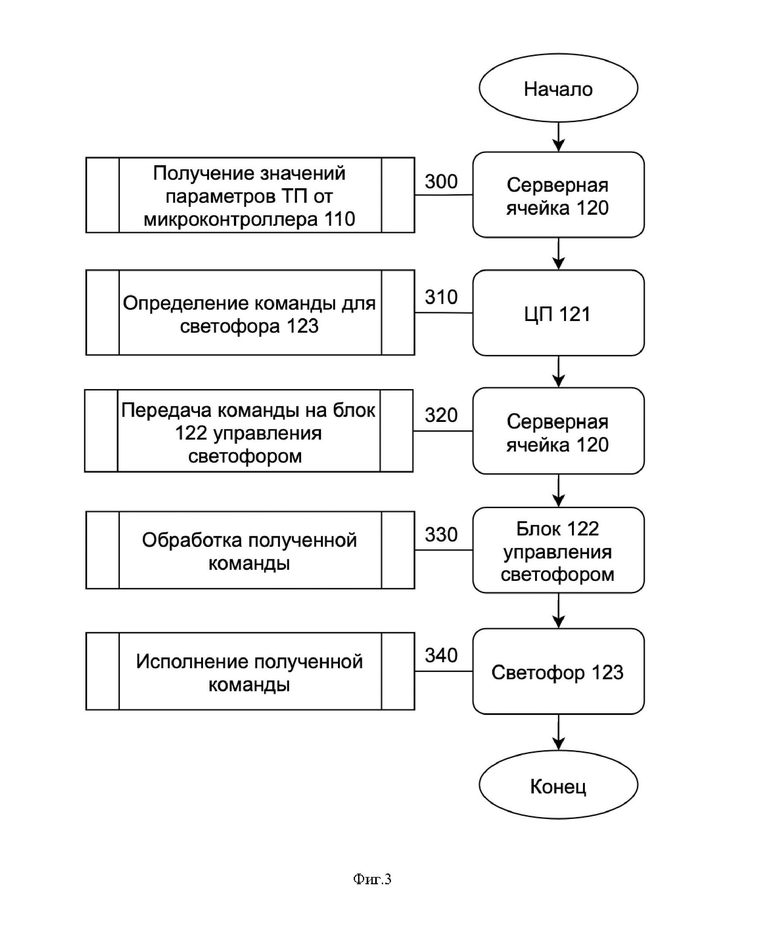
Фиг. 3 - Алгоритм регулирования дорожного движения.
Для иллюстрации возможности реализации и более полного понимания сути группы изобретений ниже представлен вариант ее осуществления, который может быть любым образом изменен или дополнен, при этом настоящая группа изобретений ни в коем случае не ограничивается представленным вариантом.
Комплекс для регулирования дорожного движения включает систему для определения значений параметров транспортного потока, систему для регулирования дорожного движения и серверную стойку комплекса для регулирования дорожного движения.
Система для определения значений параметров транспортного потока содержит серверную ячейку 100 с центральным процессором 101 и нейронной сетью, установленной в ее внутренней памяти, и видеодетектор, содержащий установленный в корпусе микроконтроллер 110, снабженный модулем беспроводной связи, при этом во внутренней памяти микроконтроллера 110 установлена компактная нейронная сеть, а микроконтроллер подключен к видеокамере 111 и выполнен с возможностью подключения к центральному процессору 101 серверной ячейки 100.
Система для регулирования дорожного движения содержит серверную ячейку 120 с центральным процессором 121 и установленным в ее внутренней памяти модулем адаптивного управления светофорами, блок 122 управления светофором, снабженный модулем беспроводной связи, светофор 123, при этом микроконтроллер 110 выполнен с возможностью подключения к центральному процессору 121. Серверная стойка комплекса для регулирования дорожного движения при этом состоит из серверных ячеек 100 и 120.
Способ регулирования дорожного движения реализуется следующими последовательными связанными между собой основными алгоритмами:
1. Алгоритм определения значений параметров транспортного потока;
2. Алгоритм регулирования дорожного движения на основе значений параметров транспортного потока.
1.Алгоритм определения значений параметров транспортного потока реализуется рядом основных этапов, которые включают в себя: этап 200, на котором видеокамерой 111 осуществляется получение изображения транспортного потока (ТП), этап 210, на котором микроконтроллером 110 обрабатывается изображение ТП с использованием компактной нейронной сети (НС), этап 220, на котором микроконтроллером 110 осуществляется передача изображения ТП на серверную ячейку 100, этап 230, на котором серверной ячейкой 100 осуществляется получение изображения ТП, этап 240, на котором центральным процессором 101 осуществляется разметка изображения ТП с использованием нейронной сети (НС), этап 250, на котором серверной ячейкой 100 осуществляется передача полученных весовых коэффициентов на микроконтроллер 110, этап 260, на котором микроконтроллером 110 осуществляется внесение полученных весовых коэффициентов в компактную нейронную сеть, этап 270, на котором микроконтроллером 110 осуществляется обработка изображения ТП компактной НС, этап 280, на котором микроконтроллером 110 осуществляется определение значений параметров транспортного потока компактной НС.
2. Алгоритм регулирования дорожного движения на основе значений параметров транспортного потока реализуется рядом основных этапов, которые включают в себя: этап 300, на котором серверной ячейкой 120 осуществляется получение значений параметров ТП от микроконтроллера 110, этап 310, на котором центральным процессором 121 осуществляется определение команды для светофора 123, этап 320, на котором серверной ячейкой 120 осуществляется передача команды на блок 122 управления светофором, этап 330 на котором блоком 122 управления светофором осуществляется обработка полученной команды этап 340, на котором светофором 123 осуществляется исполнение полученной команды.
Более конкретно, этапы алгоритмов определения значений параметров транспортного потока и регулирования дорожного движения на основе значений параметров транспортного потока реализуются следующим образом:
1. На этапе 200 видеокамерой 111, установленной на перекрестке или участке дорожного полотна видеодетектора, осуществляется получение изображения объектов транспортного потока. Изображение с видеокамеры передается в микроконтроллер 110 и на этапе 210 обрабатывается с использованием компактной нейронной сети (НС), которая за счет математической модели и стандартных наборов весовых коэффициентов обеспечивает возможность классификации микроконтроллером 110 объектов на полученном изображении и обнаружения на нем объектов транспортного потока, в том числе транспортных средств, границ дорожного полотна, разделительных полос, светофорных объектов, дорожных знаков и пр.
На этапе 220 микроконтроллером 110 осуществляется передача изображения ТП на серверную ячейку 100, для чего оно видеопотоком транслируется микроконтроллером 110 через модуль беспроводной связи. После этого за счет интерфейса серверной ячейкой 100 выполняется этап 230 и осуществляется получение изображения ТП. Полученное изображение обрабатывается центральным процессором 101 с использованием нейронной сети (НС), которая за счет математической модели, предварительно обученной на изображениях, полученных с разных ракурсов, при разных погодных условиях и освещении, на этапе 240 осуществляет разбивку видеопотока на отдельные кадры, классифицирует объекты на кадрах и формирует весовые коэффициенты для полученного изображения ТП.
На этапе 250 за счет модуля беспроводной связи серверной ячейкой 100 осуществляется передача полученных весовых коэффициентов на микроконтроллер 110, и на этапе 260 им инициализируется процесс внесения полученных весовых коэффициентов в математическую модель компактной НС. На этапе 270 микроконтроллером 110 осуществляется обработка изображения ТП обученной компактной НС, позволяя за счет этого более точно классифицировать объекты на изображении ТП. Первоначально, этот этап обеспечивает возможность учета компактной НС и микроконтроллером 110 ракурса установки видеокамеры 111. Затем, при периодическом повторении этого этапа центральным процессором 101, обеспечивается дополнительная разметка изображения ТП, а сформированные весовые коэффициенты обеспечивают возможность учета компактной НС и микроконтроллером ПО периодического изменения погодных условий и освещенности участка дороги. Такой подход обеспечивает существенное повышение точности классификации объектов ТП на изображении ТП микроконтроллером 110 при возможности существенного снижения требований к аппаратному обеспечению видеодетектора.
Затем микроконтроллером 110 с применением компактной НС осуществляется этап 280, на котором определяются параметры транспортного потока, для чего им используется размеченная область на изображении, полученном с видеокамеры 111, на котором объекты транспортного потока в зоне видимости видеокамеры 111 получают координаты местоположения. Это обеспечивает возможность наложения микроконтроллером 110 изображения, полученного с видеокамеры 111, на виртуальную плоскость, размеры которой привязаны к географическим координатам. На основании этого компактная НС определяет координаты местоположения каждого объекта транспортного потока, отображаемого в этой области, что обеспечивает возможность получения данных о:
• Положении каждого транспортного средства на плоскости дороги;
• Скорости каждого транспортного средства;
• Расстоянии между транспортными средствами;
• Типе транспортного средства (автомобиль, грузовик, общественный транспорт);
• Количестве транспортных средств в каждой полосе движения и участке дороги; Затем эти данные обрабатываются микроконтроллером 110 и осуществляется вычисление следующих значений параметров транспортного потока:
• Скорости движения потока транспортных средств на дороге и на каждой полосе движения;
• Длине очереди из транспортных средств на каждой полосе движения;
• Интенсивности движения транспортных средств на дороге и на каждой полосе (количество транспортных средств, пересекающих виртуальную плоскость, за интервал времени);
• Загруженности дороги и каждой полосы движения транспортными средствами. В рамках настоящей группы изобретений, на основе имеющихся данных микроконтроллером 110, рассчитывается средняя скорость движения потока транспортных средств в одном направлении в настоящий момент времени.
2. На этапе 300 серверной ячейкой 120 осуществляется получение значений параметров ТП от микроконтроллера 110, для чего микроконтроллером 110 в автоматическом режиме осуществляется передача потока данных, содержащих значения этих параметров. На основе полученных значений центральный процессор 121 с задействованием модуля адаптивного управления светофором осуществляет этап 310, на котором им осуществляется определение необходимой команды для светофора 123, обеспечивающей возможность переключения сигнала светофора 123.
Метод определения центральным процессором 121 необходимой команды для светофора 123 основывается на имеющемся во внутренней памяти серверной ячейки 120 дорожном графе, каждому ребру которого присвоены данные, полученные от микроконтроллера 110 того видеодетектора, который установлен на соответствующем ребру графа участке дороги.
В рамках настоящей группы изобретений данные средней скорости потока, полученные от микроконтроллера 110 сравниваются центральным процессором 121 с максимальной средней скоростью движения потока транспортных средств на этой полосе движения и затем определяется их соотношение, на основании которого вычисляется значение загруженности полос движения в каждом из направлений, которое может варьироваться от 1 до 10 баллов.
В зависимости от величины значения загруженности полос движения в каждом из направлений центральным процессором 121 осуществляется выбор команды для светофора 123, которая может заключаться в установке длительности индикации одного из сигналов светофора 123. К примеру, в случае, если значение загруженности полосы движения в одном направлении превышает 8 баллов, то длительность индикации зеленого сигнала светофора вместо 45 с может составлять 90 с. При этом в случае, если значение загруженности полосы движения в этом направлении снизилось до 5 баллов, то длительность индикации зеленого сигнала светофора может быть снижена до первоначального значения, равного 45 с.
Выбранная команда на этапе 320 передается на блок 122 управления светофором, который на этапе 330 обрабатывает ее и преобразовывает в соответствующий сигнал для светофора 123, который на этапе 340 исполняет ее. Таким образом команды могут передаваться сразу на несколько блоков 122 управления светофорами, тем самым позволяя оптимизировать работу нескольких светофоров.
Для подтверждения эффективности функционирования технических решений по группе изобретений был проведен ряд испытаний на участке дороги, при которых регистрировалась точность обработки изображения ТП микроконтроллером 110 и обученной компактной НС на основе данных классификации на изображении 20 легковых автомобилей при разной освещенности дороги и в дождь, а также длительность проезда трех перекрестков в одно и то же время в 17:00 в будний день при одних и тех же погодных условиях при использовании видеодетекторов с микроконтроллерами 110, имеющими одинаковые аппаратные возможности.
Полученные данные отражены в Таблице 1.
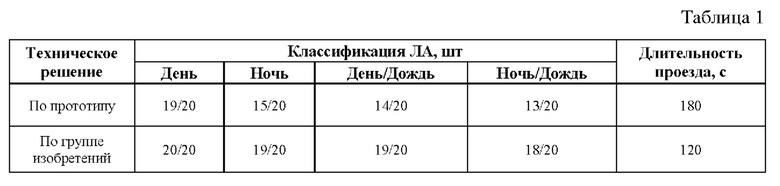
Результаты испытаний показали, что в процессе выполнения алгоритма определения значений параметров ТП классификация Л А микроконтроллером 110 с обученной компактной НС осуществляется точнее, особенно в дождливую погоду и при слабой освещенности, что подтверждается большим количеством детектируемых ЛА при любой освещенности и особенно в дождь. При этом наблюдалось снижение длительности проезда трех перекрестков в наиболее загруженное время на 30%.
Таким образом достигается технический результат и повышается точность классификации видеодетектором объектов транспортного потока на изображении транспортного потока, повышается точность определения видеодетектором значений параметров транспортного потока при имеющихся аппаратных возможностях видеодетектора, и повышается точность определения команд для средств регулирования дорожного движения модулем адаптивного управления средствами регулирования дорожного движения, тем самым улучшаются эксплуатационные характеристики комплекса для регулирования дорожного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс оповещения участников дорожного движения для предотвращения их столкновений | 2024 |
|
RU2836064C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ДОРОЖНОГО ТРАНСПОРТА | 1997 |
|
RU2125295C1 |
| УСТРОЙСТВО ГЕНЕРАЦИИ КОМАНДЫ УПРАВЛЕНИЯ ПОТОКОМ ДАННЫХ И УСТРОЙСТВО УПРАВЛЕНИЯ ДАТЧИКАМИ | 2013 |
|
RU2569123C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| СИСТЕМА И СПОСОБ РЕГУЛИРОВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2432616C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ ПОТОКОВ НА ПЕРЕКРЕСТКЕ | 2011 |
|
RU2486599C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА МНОГОПОЛОСНЫХ ПЕРЕКРЕСТКАХ | 2011 |
|
RU2469410C1 |
| Система и способ управления светофором | 2021 |
|
RU2771975C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ОБЪЕКТА И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ОБЪЕКТА | 2009 |
|
RU2451593C2 |
Группа изобретений относится к комплексам автоматического регулирования дорожного движения с использованием нейросетевых архитектур и может быть применена в транспортной промышленности. Комплекс для регулирования дорожного движения содержит систему для определения значений параметров транспортного потока и систему для регулирования дорожного движения. Система для определения значений параметров транспортного потока содержит видеодетекторы и сервер. Сервер выполнен с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки центральным процессором полученного от видеодетектора изображения с использованием нейронной сети и внесения корректировки в используемую в микроконтроллере видеодетектора нейронную сеть. Повышается точность классификации видеодетектором объектов транспортного потока на изображении транспортного потока. 4 н. и 8 з.п. ф-лы, 3 ил., 1 табл.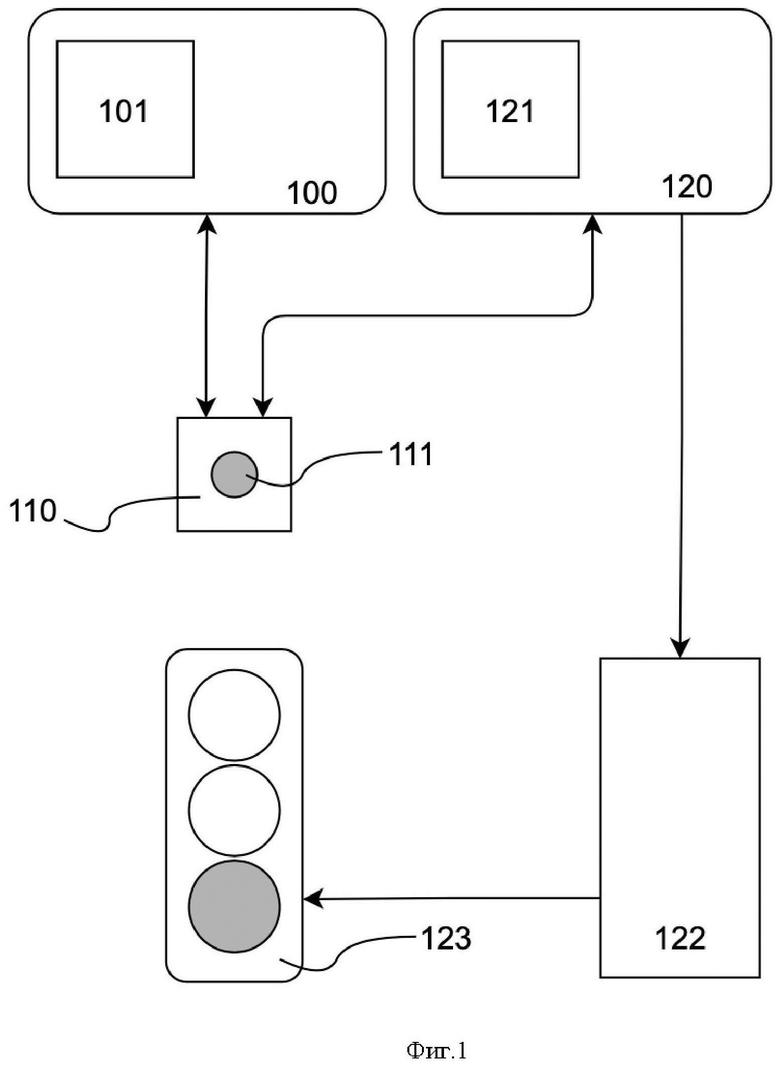
1. Комплекс для регулирования дорожного движения, содержащий выполненные с возможностью обмена данными систему для определения значений параметров транспортного потока и систему для регулирования дорожного движения, при этом система для определения значений параметров транспортного потока содержит видеодетекторы, каждый из которых выполнен с возможностью получения изображения транспортного потока, а также классификации объектов транспортного потока на изображении транспортного потока и определения значений параметров транспортного потока с использованием нейронной сети, а система для регулирования дорожного движения содержит модуль адаптивного управления средствами регулирования дорожного движения, выполненный с возможностью получения значений параметров транспортного потока от видеодетектора, определения команды для средств регулирования дорожного движения с учетом значений этих параметров и передачи команды на электронные средства регулирования дорожного движения, отличающийся тем, что система для определения значений параметров транспортного потока содержит сервер, выполненный с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки полученного от видеодетектора изображения транспортного потока с использованием нейронной сети и корректировки используемой в видеодетекторе нейронной сети с учетом обработанного изображения транспортного потока.
2. Комплекс по п.1, отличающийся тем, что для каждого отдельного электронного средства регулирования дорожного движения система для регулирования дорожного движения содержит отдельный модуль адаптивного управления.
3. Комплекс по п.1, отличающийся тем, что модуль адаптивного управления содержит нейронную сеть, предварительно обученную на выборке данных, содержащей значения параметров транспортного потока и команды для электронных средств регулирования дорожного движения.
4. Комплекс по п.1, отличающийся тем, что к модулю адаптивного управления электронными средствами регулирования дорожного движения подключены внешние источники данных.
5. Система для определения значений параметров транспортного потока комплекса для регулирования дорожного движения, включающая видеодетектор, выполненный с возможностью получения изображения транспортного потока и содержащий микроконтроллер, который снабжен нейронной сетью, обеспечивающей возможность классификации объектов транспортного потока на изображении транспортного потока и определения значений параметров транспортного потока, отличающаяся тем, что система содержит сервер, выполненный с возможностью подключения к видеодетектору, получения изображения транспортного потока от видеодетектора, обработки центральным процессором полученного от видеодетектора изображения с использованием нейронной сети и внесения корректировки в используемую в микроконтроллере видеодетектора нейронную сеть с учетом обработанного изображения транспортного потока.
6. Способ регулирования дорожного движения, включающий определение значений параметров транспортного потока системой для определения значений параметров транспортного потока, в процессе которого видеодетектором осуществляется получение изображения транспортного потока, а затем, с использованием нейронной сети, осуществляется классификация объектов транспортного потока на изображении транспортного потока и определение значений параметров транспортного потока, после чего системой для регулирования дорожного движения, посредством модуля адаптивного управления средствами регулирования дорожного движения, осуществляется получение значений параметров транспортного потока от видеодетектора, определение команд для электронных средств регулирования дорожного движения с учетом значений параметров транспортного потока и передача команд на электронные средства регулирования дорожного движения, отличающийся тем, что сервером системы для определения значений параметров транспортного потока осуществляется подключение к видеодетектору, после чего осуществляется получение изображения транспортного потока от видеодетектора, затем полученное изображение обрабатывается сервером с использованием нейронной сети, содержащейся в его внутренней памяти, после чего сервером, с учетом обработанного изображения транспортного потока, корректируется используемая видеодетектором нейронная сеть.
7. Способ по п.6, отличающийся тем, что определение команд для электронных средств регулирования дорожного движения модулем адаптивного управления осуществляется за счет использования нейронной сети, предварительно обученной на выборке данных, содержащей значения параметров транспортного потока и выбранные команды для электронных средств регулирования дорожного движения.
8. Способ по п.7, отличающийся тем, что обучение нейронной сети осуществляется с использованием метода deep learning.
9. Способ по п.1, отличающийся тем, что определение команд для электронных средств регулирования дорожного движения осуществляется с учетом значений параметров транспортного потока, полученных с подключенных к модулю адаптивного управления внешних источников данных.
10. Этап определения значений параметров транспортного потока способа регулирования дорожного движения, включающий получение изображения транспортного потока видеодетектором, классификацию микроконтроллером видеодетектора объектов транспортного потока на изображении транспортного потока и определение значений параметров транспортного потока посредством нейронной сети, содержащейся в микроконтроллере, отличающийся тем, что сервером системы для определения значений параметров транспортного потока осуществляется подключение к видеодетектору, осуществляется получение изображения транспортного потока от видеодетектора, после чего центральным процессором сервера осуществляется обработка полученного от микроконтроллера изображения с использованием нейронной сети, содержащейся во внутренней памяти сервера и затем, с учетом обработанного изображения транспортного потока, сервером корректируется используемая микроконтроллером нейронная сеть.
11. Способ по п.10, отличающийся тем, что центральным процессором сервера используется нейронная сеть, формирующая математическую модель с весовыми коэффициентами для изображений транспортного потока, полученных от видеодетекторов на основе обучающей выборки, состоящей из массива изображений, полученных с видеодетекторов или видеокамер, установленных под разными ракурсами в разное время суток и года, а также при разных погодных условиях.
12. Способ по п.11, отличающийся тем, что математическая модель со сформированными весовыми коэффициентами для полученного от видеодетектора изображения под конкретным ракурсом его установки, в конкретное время суток и время года, а также при конкретных погодных условиях, передаются сервером на видеодетектор.
| CN 100595809 С, 24.03.2010 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| CN 109101934 A, 28.12.2018 | |||
| ИЗМЕРИТЕЛЬ МАССЫ | 0 |
|
SU194373A1 |
| CN 103295017 A, 11.09.2013. | |||

