Группа изобретений относится к области контроля дорожного движения и предназначена для сбора статистической информации о дорожном движении, а также обнаружения и видеофиксации нарушений правил дорожного движения транспортными средствами (далее также – ТС) с целью повышения безопасности дорожного движения.
Группа изобретений направлена на повышение безопасности дорожного движения посредством контроля скорости и траектории движения транспорта на протяженной зоне контроля, обеспечивающие автоматический контроль движения транспорта в контролируемой зоне. При этом происходит автоматическая идентификация транспорта, распознавание номерных знаков и определение параметров движения обнаруженных объектов (координаты, скорость, траектория, размеры и т.п.) в локальной зоне контроля.
Из уровня техники известно множество устройств и способов контроля дорожного движения.
Известно устройство фотовидеофиксации нарушений ПДД Бинар (патент RU 2472227, опубл. 01.10.2013), представляющее собой радиолокационный видеофиксирующий измеритель скорости движения транспорта, имеющий в своем составе соединенные с блоком обработки информации блок управления, блок памяти и радиолокационный измерительный модуль, а также блок индикации с дисплеем и два телевизионных канала, содержащих видеокамеры, выполненные с обеспечением возможности отображения на дисплее блока индикации синхронизированных по времени стоп-кадров изображений общего плана и крупного плана контролируемого участка и записи в блок памяти видеосюжета в виде последовательности стоп-кадров, программно-аппаратный модуль-таймер, функционально соединенный с блоком обработки информации, блок индикации и блок памяти.
Известен способ регистрации нарушений ПДД (патент RU2493604, опубл. 20.09.2013), в котором качестве средства видеофиксации используют одну заранее откалиброванную видеокамеру, при этом обработку данных о движении ТС производят с применением определения по изображениям указанной видеокамеры положений ТС относительно дороги, по которой перемещаются указанные ТС. По ряду последовательных изображений видеокамеры определяют скорости ТС. Для определения скоростей и положений ТС относительно дороги в абсолютном масштабе расстояний используют контрольные точки ТС, абсолютные расстояния между которыми заранее известны.
Известен способ контроля движения транспортных средств (патент RU 2491647, опубл. 27.08.2013), в котором камеры располагают на одном посту, обеспечивающем контроль дорожного движения. Вычисляют как минимум две параллельные плоскости, каждая из которых проходит поперек дороги через поле зрения соответствующей камеры. Скорость транспортного средства считают по времени пересечения указанных плоскостей одинаковыми элементами транспортных средств. Определение времени пересечения любой из указанных параллельных плоскостей одинаковыми элементами транспортных средств производится путем интерполяции как минимум по двум кадрам с заданными временами фиксации.
Известен способ определения метрологических характеристик измерителя скорости движения транспортного средства по видеокадрам (патент RU 2442173, опубл. 10.02.2012), в котором измеряют период следования видеокадров с изображением пластины государственного регистрационного знака (ГРЗ) ТС с помощью средства поверки и с помощью поверяемого ИС. Сравнивают значения периода следования видеокадров, измеренные поверяемым ИС и средством поверки, определяют относительную погрешность измерения периода следования видеокадров. Измерения и определение относительной погрешности производят несколько раз, из полученных значений относительной погрешности периода следования видеокадров выбирают максимальное. Далее перемещают ТС в зоне контроля видеокамеры, фиксируют положения ТС при въезде и выезде из зоны контроля видеокамеры и соответствующие им видеокадры с изображением пластины ГРЗ соответственно в верхней и нижней части видеокадра. Измеряют перемещение ТС в зоне контроля с помощью средства поверки, а также с помощью поверяемого ИС по перемещению изображения пластины ГРЗ на видеокадрах. Сравнивают значения перемещения ТС, измеренные поверяемым ИС и средством поверки, определяют относительную погрешность измерения перемещения ТС в зоне контроля видеокамеры. Повторяют измерения перемещения ТС и определение относительной погрешности перемещения ТС в зоне контроля несколько раз, из полученных значений относительной погрешности измерения перемещения выбирают максимальное. Относительную погрешность измерения скорости движения ТС определяют, как сумму максимальных значений относительной погрешности измерения периода следования видеокадров и относительной погрешности измерения перемещения ТС в зоне контроля.
Общими недостатками данных способов и устройств являются: невозможность контроля нарушений, которые обычно совершаются на протяженных участках дороги (обгон, агрессивная езда, выезд на встречную полосу движения, на обочину и т.п.), невозможность оценки габаритов транспортных средств, а также получения сведений статистического характера о загрузке магистралей с учетом грузового и длинномерного транспорта.
Известно устройство фотовидеофиксации нарушений ПДД «Кордон» (пат. №№ 113398, опубл. 10.02.2012, 2539676, опубл. 20.01.2015, www.simicon.ru), содержащее видеокамеру с функцией распознавания образов и радиолокатор, которое обеспечивает измерение скорости и распознавание номерных знаков транспортных средств в зоне контроля видеокамеры, в том числе и при наличии нескольких автомобилей в поле зрения камеры. Протяженность зоны контроля этого устройства зависит от фокусного расстояния применяемой видеокамеры и составляет 25-40 м. Зона контроля такой протяженности позволяет устойчиво фиксировать скорость проходящего транспорта и его номерные знаки, однако для фиксации нарушений правил движения по полосам, правил обгона, а также для выявления т.н. «агрессивной езды» такой зоны контроля недостаточно, т.к. такого рода нарушения обычно происходят на гораздо более протяженных участках дороги. Таким образом данное техническое решение обеспечивает выявление нарушений правил дорожного движения только определенного вида, а именно таких, которые могут быть выявлены на коротком участке дороги.
Известно множество аналогичных устройств, например, Скат (http://www.olvia.ru/product/complex/skat), обладающие теми же недостатками.
В качестве прототипа, наиболее близкого по принципу работы, выбрана группа изобретений «Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления» (RU 2382416, опубл. 20.02.2010).
Известное техническое решение также предназначено для решения нескольких задач, связанных с контролем дорожного движения с целью обеспечения его безопасности. Известные способ определения скорости движения и координат транспортных средств и устройство для его осуществления обеспечивают снижение вероятности ошибки идентификации ТС-нарушителя в системах автоматической регистрации нарушений скоростного режима движения ТС, а также увеличение протяженности зоны контроля скоростного режима движения вплоть до 1000 м. Данные задачи решаются за счет комплексирования в одном устройстве нескольких контрольно-измерительных инструментов. Для контроля скорости используется радиолокатор, для корректного присвоения результатов измерения скорости обнаруженным целям используется панорамная видеокамера, изображение с которой формируется синхронно с радиолокационными измерениями, а также дополнительной камерой, предназначенной для распознавания номерных знаков в зоне контроля, находящейся вне зоны контроля радиолокатора и панорамной видеокамеры. Все перечисленные инструменты вместе с блоками обработки информации располагаются на высоте порядка 5-6 м на придорожной опоре либо над дорожным полотном и обеспечивают возможность контроля скорости транспорта на значительном удалении от зоны распознавания номерного знака. Такое несовпадение зоны измерения скорости и зоны идентификации автомобиля, а также моментов времени фиксации скорости и номерного знака является недостатком, порождающим возможность некорректной трактовки результатов измерений с возможностью ошибочного присвоения результата измерений скорости. Однако, особо серьезным и непреодолимым в рамках данной концепции недостатком является очевидная возможность ошибок при обнаружении нарушителя скоростного режима и отслеживание его траектории на дальних дистанциях. Указанная в известном способе цель увеличения протяженности зоны контроля достигается только при контроле малозагруженных дорог, когда двигающиеся по многополосной дороге автомобили мало маневрируют и таким образом не затеняют друг друга на видеокадрах, снятых панорамной видеокамерой, и не искажают результаты измерений скорости радиолокатором в дальней зоне. Очевидно, что эта видеокамера направлена под весьма пологим углом к дорожному полотну (высота установки 6м, дальность – 1км), что при увеличении интенсивности движения приводит к частому затенению одного автомобиля другим, особенно при маневрировании, и, следовательно, к повышению вероятности ошибок траекторных измерений. Такие ошибки являются критически важными, т.к. ошибка в прослеживаемости траектории автомобиля от момента измерения скорости в дальней зоне до момента распознавания его номерного знака в ближней зоне может привести к некорректному назначению штрафа и наказанию водителя, который не является нарушителем. Малодостоверные в условиях плотного потока траекторные измерения не позволяют также производить фиксацию нарушений типа «выезд на встречную полосу», «агрессивная езда» и др., связанных с необходимостью контроля траектории движения ТС. Кроме того, видеозапись транспортных потоков видеокамерой, расположенной на небольшой высоте, дает лишь ограниченные варианты изображений ТС (в большинстве случаев – это вид спереди либо сзади), что не позволяет в принципе произвести оценку длины ТС по его изображению, определить интервал между ТС и достоверно определить интенсивность движения.
Технической проблемой, которую решает предложенная группа изобретений, является недостаточная эффективность контроля дорожного движения на протяженном многополосном участке дороги при интенсивном движении в известных устройствах уровня техники, в частности недостаточная достоверность результатов выявления нарушителей.
Техническим результатом является повышение эффективности контроля дорожного движения на протяженном участке дороги при интенсивном движении, в частности повышение достоверности результатов выявления нарушителей, а также в расширении объемов детальной статистической информации о транспортном потоке и в получении достоверных сведений о выявленных нарушителях правил дорожного движения на контролируемом участке дороги (включая, но не ограничиваясь нарушениями вида: превышение скорости, движение по обочине, движение по полосе встречного движения, агрессивная езда, нарушение правил обгона и др.)
Техническая проблема решается и технический результат достигается предлагаемыми способом автоматического контроля дорожного движения и системой, его реализующей.
Предлагаемый способ содержит следующие этапы, на которых:
- производят измерение параметров движения транспортных средств в локальной зоне контроля по меньшей мере одной узконаправленной видеокамеры,
- распознают номерные знаки упомянутых транспортных средств с помощью по меньшей мере одной узконаправленной видеокамеры,
- осуществляют видеонаблюдение и видеозапись с помощью по меньшей мере одной широкоугольной видеокамеры в расширенной зоне контроля, перекрывающей зону контроля по меньшей мере одной узконаправленной видеокамеры,
- производят компьютерный анализ полученных видеозаписей с целью построения траекторий и определения параметров движения транспортных средств, зафиксированного в зоне контроля по меньшей мере одной широкоугольной видеокамеры,
- сопоставляют данные, полученные с помощью по меньшей мере одной узконаправленной видеокамеры и по меньшей мере одной широкоугольной видеокамеры,
- производят идентификацию на этой основе зафиксированных транспортных средств с выявлением нарушений ПДД.
В отличие от известных способов в предложенном способе также:
- осуществляют пространственную привязку изображений зон контроля по меньшей мере одной широкоугольной видеокамеры и по меньшей мере одной узконаправленной видеокамеры посредством размещения опознаков с известными координатами в зоне контроля обеих видеокамер,
- осуществляют синхронизацию по времени изображений, полученных по меньшей мере одной широкоугольной видеокамерой и по меньшей мере одной узконаправленной видеокамерой, за счет фиксации точных значений текущего времени в каждой из видеозаписей,
- осуществляют контроль параметров движения транспортных потоков с помощью по меньшей мере одной широкоугольной видеокамеры, размещенной на высоте, превышающей высоту установки по меньшей мере одной узконаправленной видеокамеры, предотвращая тем самым взаимное затенение транспортных средств на изображении транспортного потока;
- производят автоматический анализ видеозаписей транспортных потоков, полученных по меньшей мере одной широкоугольной видеокамерой, в ходе которого определяют траекторию перемещения каждого транспортного средства и ее связь с точными значениями текущего времени,
- производят идентификацию транспортного средства посредством автоматического распознавания его номерного знака в локальной зоне контроля по меньшей мере одной узконаправленной камеры с привязкой его траектории в этой зоне контроля к точным значениям текущего времени;
- выполняют автоматическое сопоставление данных, полученных по меньшей мере одной широкоугольной и по меньшей мере одной узконаправленной видеокамерами, по совпадению траекторий и точных значений текущего времени в той части зоны контроля, которая является общей для обеих видеокамер, в результате которого выявляют взаимно-однозначное соответствие между характером движения транспортного средства в зоне контроля широкоугольной видеокамеры и его номерным знаком, распознанным в зоне контроля узконаправленной видеокамеры;
- результаты идентификации транспортных средств в сочетании с информацией о характере их движения на контролируемом участке дороги автоматически направляют в центр обработки данных по имеющимся каналам связи для формирования постановления о нарушении ПДД либо для составления статистических отчетов.
В предпочтительном варианте способа выявление движущихся целей и построение их траекторий в зоне контроля по меньшей мере одной широкоугольной видеокамеры производят методом нейронных сетей.
В ходе выявления движущихся транспортных потоков в зоне контроля по меньшей мере одной широкоугольной видеокамеры одновременно производят автоматический анализ габаритов транспортных средств, а также сбор статистических данных о загрузке и скорости движения транспортного потока на данном участке дороги.
В предпочтительном варианте осуществляют распознавание марок и моделей наблюдаемых транспортных средств посредством сопоставления изображений на виде сверху, полученных по меньшей мере одной широкоугольной видеокамерой и изображений, полученных по меньшей мере одной узконаправленной видеокамерой с применением нейронных сетей.
В другом аспекте предложена система автоматического контроля дорожного движения на протяженном участке дороги, содержащая по меньшей мере одну узконаправленную видеокамеру для контроля дорожного движения и идентификации целей в локальной зоне, по меньшей мере одну широкоугольную видеокамеру, процессорный модуль, навигационный модуль, модуль связи. Система отличается тем, что по меньшей мере одна широкоугольная видеокамера размещена на высоте, превышающей высоту установки по меньшей мере одной узконаправленной видеокамеры, а система выполнена с возможностью синхронизации по времени видеопотоков по меньшей мере одной узконаправленной видеокамеры и по меньшей мере одной широкоугольной видеокамеры, а также дополнительно содержит передатчик видеосигнала, подключенный к по меньшей мере одной широкоугольной видеокамере, блок сопряжения, содержащий приемник видеосигнала, программно-аппаратный модуль видеоаналитики, выполненный с возможностью сопоставления данных, полученных по меньшей мере одной широкоугольной видеокамерой и по меньшей мере одной узконаправленной видеокамерой, и выявления взаимно-однозначного соответствия между траекториями транспортных средств, зафиксированными в протяженной зоне контроля с помощью по меньшей мере одной широкоугольной видеокамеры, и номерными знаками транспортных средств, идентифицированными с помощью по меньшей мере одной узконаправленной видеокамеры, и по меньшей мере три опознака, координаты которых внесены в память модуля видеоаналитики, причем по крайней мере один опознак размещен в той части зоны контроля, которая является общей для по меньшей мере одной широкоугольной видеокамеры и по меньшей мере одной узконаправленной видеокамеры.
По меньшей мере одна широкоугольная видеокамера может быть дополнительно оснащена многоцелевым радаром, зона контроля которого по существу совпадает с зоной контроля широкоугольной видеокамеры.
По меньшей мере одна узконаправленная видеокамера может входить в состав устройства фотовидеофиксации.
Система может дополнительно содержать центральный опознак, размещенный вблизи точки установки по меньшей мере одной узконаправленной видеокамеры.
Центральный опознак может быть выполнен в виде импульсного прожектора, частота вспышек которого синхронизована с частотой кадров принимаемого видеосигнала, и которые видны на изображении, полученном с помощью по меньшей мере одной широкоугольной видеокамеры.
По меньшей мере одна широкоугольная видеокамера может быть связана с блоком сопряжения посредством проводной либо беспроводной связи.
Предпочтительно опознаки, применяемые для калибровки и совмещения траекторий транспортных средств, полученных по меньшей мере одной широкоугольной и по меньшей мере одной узконаправленной видеокамерами, выполнены с применением радиочастотных меток, обеспечивающих измерение и беспроводную передачу данных о своих координатах.
Предпочтительно, каждый опознак может содержать импульсный прожектор и связанный с ним встроенный навигационный приемник, причем прожектор выполнен с возможностью кодовой передачи точных значений текущего времени в виде вспышек, комбинации которых видны на изображении, полученном с помощью по меньшей мере одной широкоугольной видеокамеры.
По меньшей мере одна широкоугольная видеокамера может быть размещена на высотном строении или винтокрылом беспилотном летательном аппарате (БПЛА).
Также по меньшей мере одна широкоугольная видеокамера может быть расположена так, что длинная сторона ее светочувствительного сенсора сориентирована вдоль контролируемой дороги.
Протяженность зоны контроля W входящей в нее широкоугольной видеокамеры связана с высотой и угловыми параметрами ее установки выражением:
где H- высота размещения широкоугольной видеокамеры,
α – угол раскрыва объектива широкоугольной видеокамеры,
β – угол наклона оптической оси широкоугольной видеокамеры вдоль дороги по отношению к нормали.
Сущность заявленного изобретения состоит в том, что для предотвращения затенения и надежного определения траекторий движения транспорта в сочетании с измерением скорости и идентификацией каждого транспортного средства широкоугольную видеокамеру устанавливают на значительной высоте над контрольным участком дороги так, чтобы ее зона контроля частично совпадало с зоной контроля узконаправленной видеокамеры, контролирующей фрагмент того же участка дороги. Измерение параметров движения и идентификацию ТС в локальной зоне контроля в частности осуществляют с помощью устройства фотовидеофиксации (например, «Кордон», патент № RU 2539676), содержащего узконаправленную видеокамеру с функцией распознавания образов с привязкой к точным значениям текущего времени; одновременно производят видеозапись и определяют параметры движения транспорта с помощью высотной широкоугольной видеокамеры, зона контроля которой частично совпадает с зоной контроля узконаправленной видеокамеры, но существенно превышает ее; анализируют видеоизображение, записанное сверху широкоугольной видеокамерой, определяют траектории движения транспорта в ее зоне контроля с привязкой к точным значениям текущего времени и с учетом координат установленных опознаков, по крайней мере один из которых должен находиться в зоне контроля узконаправленной камеры; полученные данные сопоставляют с информацией, полученной от узконаправленной видеокамеры при идентификации ТС; в результате этого сопоставления формируют информационный массив, который содержит общие сведения статистического характера о транспортной нагрузке на контролируемом участке дороги, информацию о нарушениях правил дорожного движения на этом участке, а также информацию о номерном знаке, марке, модели, габаритах и характере движения (траектории, скорости) каждого ТС с автоматической фотовидеофиксацией нарушений ПДД, выявленных как в зоне контроля узконаправленной видеокамеры, так и в зоне контроля широкоугольной.
Для иллюстрации заявленной группы изобретений приведены чертежи, на которых
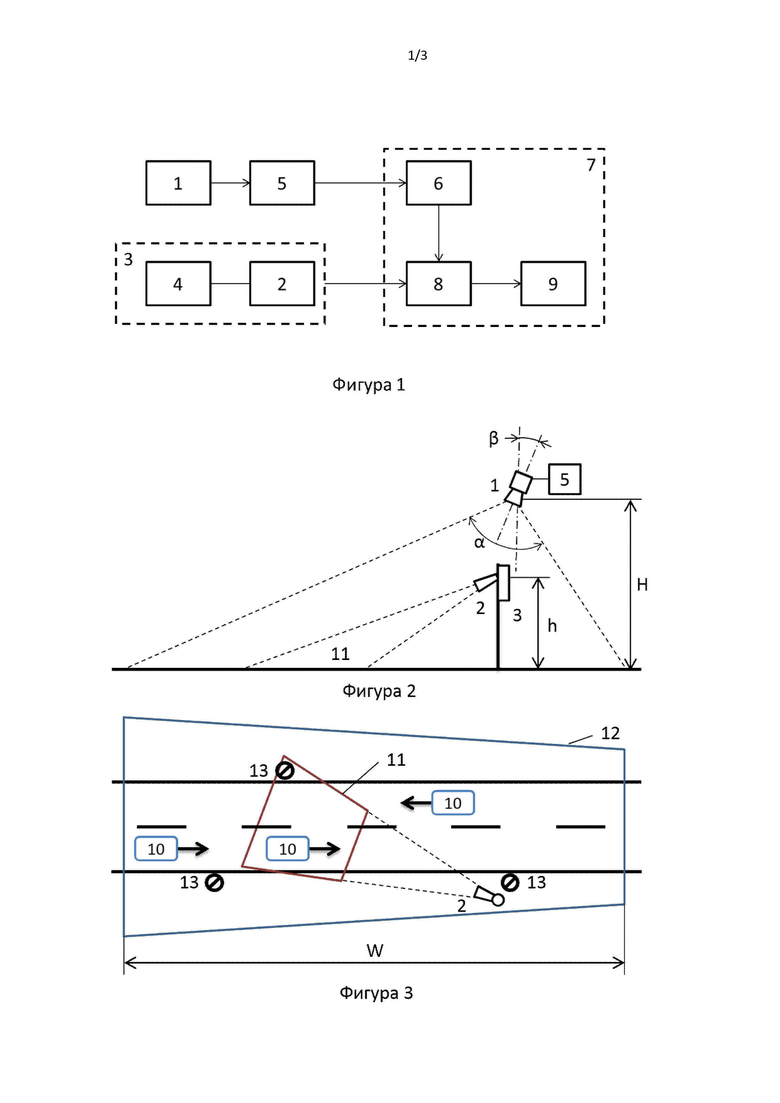
На Фиг. 1 представлена система, реализующая способ.
На фиг. 2 и 3 представлен один из вариантов реализации способа.
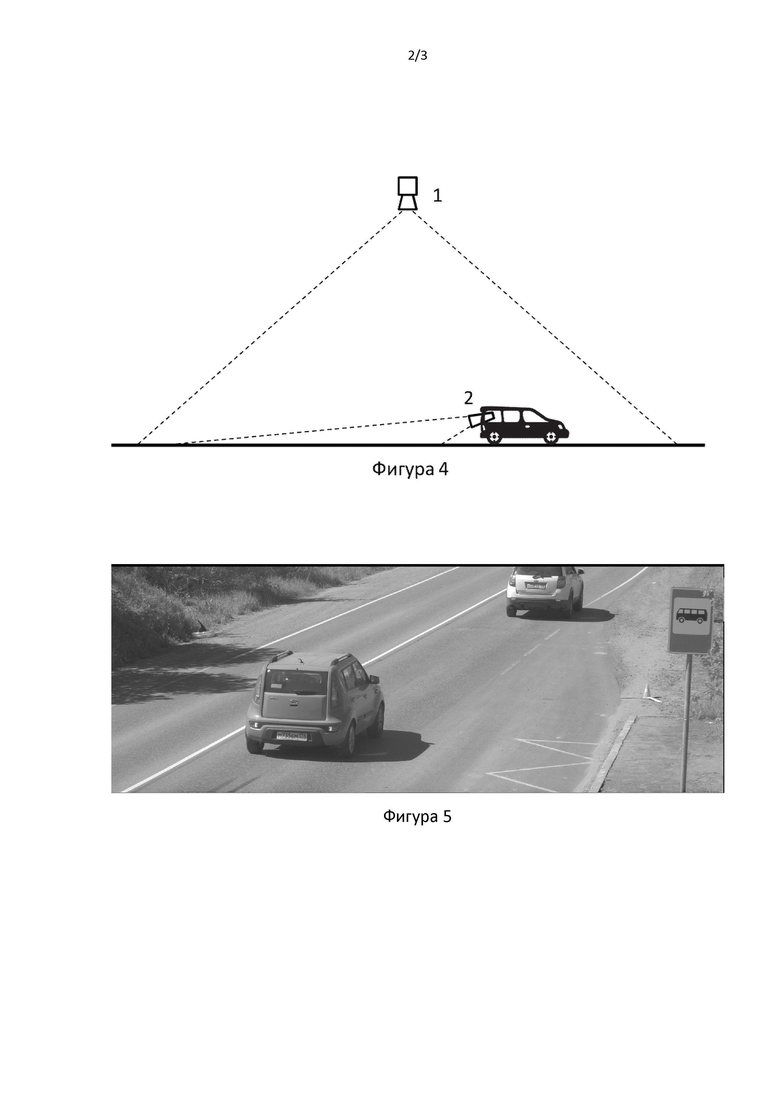
На Фиг. 4 представлен еще один вариант реализации способа.
На Фиг. 5 представлен пример изображения, получаемого узконаправленной видеокамерой.
На Фиг. 6 представлен пример изображения, получаемого широкоугольной видеокамерой.
Система, реализующая заявленный способ, представлена на Фиг.1. Она содержит по меньшей мере две видеокамеры – высотную широкоугольную видеокамеру 1 и узконаправленную видеокамеру 2 с функциями распознавания образов, измерения скорости, точных значений текущего времени и др., расположенную на придорожной опоре около или над дорогой на высоте порядка 5-8м, стандартной для размещения такого рода устройств. В частном случае реализации изобретения узконаправленная видеокамера 2 может входить в состав устройства 3 фотовидеофиксации, в котором функция измерения точных значений текущего времени реализована с помощью встроенного спутникового навигационного приемника 4. Широкоугольная видеокамера 1 размещена на такой высоте, чтобы ее зона контроля покрывала весь участок дороги, на котором ведется наблюдение за дорожным движением. При соответствующем выборе параметров видеокамеры и высоты размещения эта зона контроля может достигать 1000 м и более. Широкоугольная видеокамера 1 оснащена передатчиком 5 видеосигнала, который транслирует видеопоток, содержащий помимо изображения также и привязанную к кадрам информацию о точных значениях текущего времени. Для приема этого сигнала используется приемник 6 видеосигнала, который размещается в блоке 7 сопряжения, соединенном в свою очередь с узконаправленной видеокамерой 2 или устройством 3 фотовидеофиксации, содержащем ее. Блок 7 сопряжения также содержит программно-аппаратный модуль 8 видеоаналитики, выполненный с возможностью сопоставления данных, полученных от обеих видеокамер, а также устройства памяти, климат-контроля (на фигуре не показаны) и модуль 9 связи для обеспечения бесперебойной работы в автоматическом режиме и передачи данных на внешний сервер. В варианте исполнения системы источник данных о точных значениях текущего времени может быть встроен в приемник 6 блока 7 сопряжения. Также в варианте исполнения системы для передачи данных на центральный сервер может использоваться модуль связи, входящий, как правило, в состав устройства 3 фотовидеофиксации.
Предлагаемый способ имеет несколько вариантов реализации, в частности стационарный, передвижной и мобильный. Стационарный и передвижной варианты проиллюстрированы на Фиг. 2. Отличие этих двух вариантов между собой заключается только в питании, способе монтажа и высоте h установки устройства фотовидеофиксации с узконаправленной видеокамерой.
В стационарном варианте реализации патентуемого способа элементы системы располагаются как показано на Фиг.3. Устройство 3 фотовидеофиксации с узконаправленной видеокамерой 2, имеющей функции распознавания образов и измерения скорости, располагается на придорожной опоре (либо непосредственно над дорогой) на высоте h=5-8 м, подключается в сети 220 В и контролирует участок дороги протяженностью порядка 25-40 м. Широкоугольная видеокамера 1 с передатчиком 5 видеосигнала размещается на значительной высоте H над контролируемым участком дороги таким образом, чтобы в ее зону контроля попадала и зона контроля узконаправленной видеокамеры 2. Протяженность контрольного участка W зависит от параметров светочувствительного сенсора, применяемого в видеокамере, оптических характеристик объектива и от высоты установки. Данная зависимость описывается выражением (1):
где H- высота размещения широкоугольной видеокамеры,
α – угол раскрыва объектива широкоугольной видеокамеры,
β – угол наклона оптической оси широкоугольной видеокамеры вдоль дороги по отношению к нормали.
Для размещения широкоугольной видеокамеры 1 может быть использовано высокое здание либо иное высотное сооружение вблизи дороги, как показано на Фиг.2, либо винтокрылый БПЛА типа квадрокоптера, мультикоптера и т.п., способный удерживать на необходимой высоте широкоугольную видеокамеру 1 с беспроводным передатчиком 5 видеосигнала. Блок 7 сопряжения с программно-аппаратным модулем 8 сопоставления данных подключается к узконаправленной видеокамере 2 или устройству 3 фотовидеофиксации, содержащему узконаправленную видеокамеру 2.
В передвижном варианте реализации заявленного способа (см. Фиг. 2) устройство 3 фотовидеофиксации с узконаправленной видеокамерой 2 размещается на временной опоре или легкосъемной конструкции (например, как в патенте RU 193883) у обочины дороги, получая питание от внешнего аккумулятора, при этом широкоугольная видеокамера 1 с передатчиком 5 видеосигнала размещается на БПЛА, который удерживает видеокамеру над заданным участком дороги. Такое размещение аппаратуры позволяет вести оперативный контроль дорожного движения и легко менять дислокацию, перемещая аппаратуру на другой участок дороги в случае необходимости. Для передвижного варианта эта высота может быть порядка 1,5 м. При использовании монтажного приспособления (патент № 193883) высота установки в передвижном варианте может быть также 6 м.
В мобильном варианте реализации заявленного способа, представленном на Фиг. 4, устройство 3 фотовидеофиксации с узконаправленной видеокамерой 2 размещается на транспортном средстве - движущемся патрульном автомобиле (например, как в патенте RU 194373), а широкоугольная видеокамера 1 устанавливается на БПЛА, который двигается по маршруту патрульного автомобиля так, чтобы зона контроля широкоугольной видеокамеры 1 захватывала участок дороги, на который наведена узконаправленная видеокамера 2. Опознаки с известными координатами нанесены в виде маркеров на крыше и других элементах кузова патрульного автомобиля, постоянно находящегося в зоне контроля широкоугольной видеокамеры. Имеющийся в современных БПЛА режим «следования за объектом» либо «движения по заданному маршруту» позволяет обеспечить контроль за дорожным движением из движущегося патрульного автомобиля и оперативное обнаружение и выявление нарушителей ПДД, проверку ТС по розыскным базам данных.
Функционирование системы автоматического контроля дорожного движения показано на Фиг. 2-3. Система во всех вариантах реализации работает следующим образом.
Узконаправленная видеокамера 2 или устройство 3 фотовидеофиксации, содержащее по меньшей мере одну узконаправленную видеокамеру 2, производит фотовидеофиксацию транспортных средств 10 в своей зоне 11 контроля. При этом наличие функции распознавания номерных знаков и измерения скорости позволяет определить номер, координаты и скорость каждого ТС 10, попавшего в зону 11 контроля узконаправленной видеокамеры 2. Кроме того, фиксируется фотоизображение данного ТС и производится видеозапись его движения с привязкой каждой точки его траектории к точным значениям текущего времени. Одновременно с этим широкоугольная видеокамера 1 производит видеозапись транспортного потока в своей зоне 12 контроля, которая, как показано на Фиг.3, перекрывает зону 11 контроля. Данная видеозапись также привязывается к точным значениям текущего времени. Таким образом обеспечивается возможность одновременного контроля транспорта посредством обеих видеокамер в зоне 11 контроля узконаправленной видеокамеры 2. Кроме того, в зоне контроля широкоугольной видеокамеры находятся по меньшей мере три опознака 13, координаты которых известны, причем по меньшей мере один опознак 13 расположен также и в зоне контроля узконаправленной камеры. Видеоизображение, зафиксированное широкоугольной видеокамерой 1, транслируется с помощью передатчика 5 на приемник 6 блока 7 сопряжения. С помощью программно-аппаратного модуля 8 видеоаналитики, входящего в состав блока 7 сопряжения, происходит совместный анализ данных о движении ТС, одновременно оказавшихся в зоне 11 контроля узконаправленной видеокамеры 2 и в зоне 12 контроля широкоугольной видеокамеры 1 с целью идентификации тех целей, траектории которых были зафиксированы в зоне 12 контроля широкоугольной видеокамеры 1. Примеры изображений, полученных узконаправленной и широкоугольной видеокамерами, приведены на Фиг. 5 и 6. В результате траекторных измерений, выполненных в модуле 8 видеоаналитики с учетом известных координат опознаков 13, появляется возможность оценки транспортных потоков, попавших в зону контроля широкоугольной видеокамеры 1, измерения габаритов и расстояний между ТС, выявления нарушений, связанных с выездом на встречную полосу движения, нарушением правил обгона, агрессивной ездой и др. им подобных. При этом одновременный контроль двумя видеокамерами одного и того же ТС в зоне 11 контроля позволяет произвести идентификацию нарушителей, обнаруженных в зоне 12 контроля. С помощью модуля 9 связи, входящего в состав блока 7 сопряжения (либо имеющегося в составе устройства 3 фотовидеофиксации), информация о нарушителе передается на центральный сервер.
Дополнительной возможностью применения заявленного способа является контроль индивидуальных мобильных средств перемещения (электросамокаты, моно-колеса и т.п.), который может также осуществляться одновременно по меньшей мере двумя видеокамерами – высотная широкоугольная видеокамера определяет траекторию и скорость перемещения такого объекта, а узконаправленная видеокамера решает задачу идентификации нарушителя (например, посредством технологии распознавания лиц).
Кроме того, предлагаемый способ позволяет реализовать контроль формирования железнодорожных составов на сортировочных горках. Высотная видеокамера позволяет контролировать траектории движения всех вагонов, находящихся в ее зоне контроля, а несколько установленных в точках с известными координатами узконаправленных видеокамер обеспечивает распознавание номеров вагонов и привязку этих номеров к изображениям вагонов, полученным с помощью высотной видеокамеры. В этом случае возникает возможность контроля не только правильности формирования состава, но и скорости движения вагонов по сортировочной горке, что является критически-важным для обеспечения сохранности грузов при стыковке вагонов.
Таким образом, предлагаемые способ автоматического контроля дорожного движения и реализующая его система обеспечивают повышение эффективности контроля дорожного движения на протяженном участке дороги при интенсивном движении, в частности повышение достоверности результатов выявления нарушителей, а также в расширении объемов детальной статистической информации о транспортном потоке и в получении достоверных сведений о выявленных нарушителях правил дорожного движения на контролируемом участке дороги (включая, но не ограничиваясь нарушениями вида: превышение скорости, движение по обочине, движение по полосе встречного движения, агрессивная езда, нарушение правил обгона и др.).

Изобретение относится к области контроля дорожного движения. Способ автоматического контроля дорожного движения, в котором производят измерение параметров движения транспортных средств, распознают номерные знаки упомянутых транспортных средств, осуществляют видеонаблюдение и видеозапись, производят компьютерный анализ полученных видеозаписей с целью построения траекторий, сопоставляют данные, производят идентификацию на этой основе зафиксированных транспортных средств с выявлением нарушений ПДД. При этом осуществляют пространственную привязку изображений зон контроля одной широкоугольной видеокамеры и одной узконаправленной видеокамеры, осуществляют синхронизацию по времени изображений, осуществляют контроль параметров движения транспортных потоков, предотвращая тем самым взаимное затенение транспортных средств на изображении транспортного потока. Также производят автоматический анализ видеозаписей транспортных потоков, производят идентификацию цели посредством автоматического распознавания номерного знака, выполняют автоматическое сопоставление данных, результаты идентификации транспортных средств направляют в центр обработки данных для формирования постановления о нарушении ПДД. Достигается повышение эффективности контроля дорожного движения. 2 н. и 13 з.п. ф-лы, 6 ил.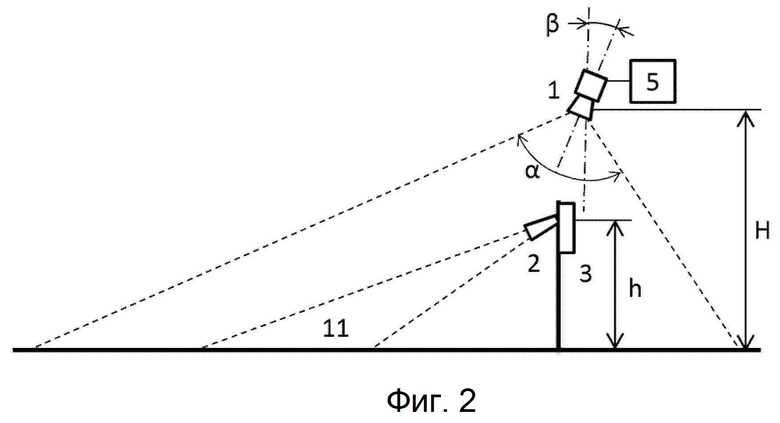
1. Способ автоматического контроля дорожного движения, в котором
- производят измерение параметров движения транспортных средств в локальной зоне контроля по меньшей мере одной узконаправленной видеокамеры,
- распознают номерные знаки упомянутых транспортных средств с помощью по меньшей мере одной узконаправленной видеокамеры,
- осуществляют видеонаблюдение и видеозапись с помощью по меньшей мере одной широкоугольной видеокамеры в расширенной зоне контроля, перекрывающей зону контроля по меньшей мере одной узконаправленной видеокамеры,
- производят компьютерный анализ полученных видеозаписей с целью построения траекторий и определения параметров движения транспортных средств, зафиксированных в зоне контроля по меньшей мере одной широкоугольной видеокамеры,
- сопоставляют данные, полученные с помощью по меньшей мере одной узконаправленной видеокамеры и по меньшей мере одной широкоугольной видеокамеры,
- производят идентификацию на этой основе зафиксированных транспортных средств с выявлением нарушений ПДД, отличающийся тем, что
- осуществляют пространственную привязку изображений зон контроля по меньшей мере одной широкоугольной видеокамеры и по меньшей мере одной узконаправленной видеокамеры посредством размещения опознаков с известными координатами в зоне контроля обеих видеокамер,
- осуществляют синхронизацию по времени изображений, полученных по меньшей мере одной широкоугольной видеокамерой и по меньшей мере одной узконаправленной видеокамерой, за счет фиксации точных значений текущего времени в каждой из видеозаписей,
- осуществляют контроль параметров движения транспортных потоков с помощью по меньшей мере одной широкоугольной видеокамеры, размещенной на высоте, превышающей высоту установки по меньшей мере одной узконаправленной видеокамеры, предотвращая тем самым взаимное затенение транспортных средств на изображении транспортного потока;
- производят автоматический анализ видеозаписей транспортных потоков, полученных по меньшей мере одной широкоугольной видеокамерой, в ходе которого определяют траекторию перемещения каждого транспортного средства и ее связь с точными значениями текущего времени,
- производят идентификацию цели посредством автоматического распознавания номерного знака транспортного средства в локальной зоне контроля по меньшей мере одной узконаправленной видеокамеры с привязкой его траектории в этой зоне контроля к значениям точного времени;
- выполняют автоматическое сопоставление данных, полученных по меньшей мере одной широкоугольной и по меньшей мере одной узконаправленной видеокамерами, по совпадению траекторий и точных значений текущего времени в той части зоны контроля, которая является общей для обеих видеокамер, в результате которого выявляют взаимно-однозначное соответствие между характером движения транспортного средства в зоне контроля широкоугольной видеокамеры и его номерным знаком, распознанным в зоне контроля узконаправленной видеокамеры;
- результаты идентификации транспортных средств в сочетании с информацией о характере их движения на контролируемом участке дороги автоматически направляют в центр обработки данных по имеющимся каналам связи для формирования постановления о нарушении ПДД либо для составления статистических отчетов.
2. Способ по п. 1, отличающийся тем, что выявление транспортных средств и построение их траекторий в зоне контроля по меньшей мере одной широкоугольной видеокамеры производят методом нейронных сетей.
3. Способ по п. 1, отличающийся тем, что в ходе выявления движущихся транспортных потоков в зоне контроля по меньшей мере одной широкоугольной видеокамеры одновременно производят автоматический анализ габаритов транспортных средств, а также сбор статистических данных о загрузке и скорости движения транспортного потока на данном участке дороги.
4. Способ по п. 1, отличающийся тем, что осуществляют распознавание марок и моделей наблюдаемых транспортных средств посредством сопоставления изображений на виде сверху, полученных по меньшей мере одной широкоугольной видеокамерой, и изображений, полученных по меньшей мере одной узконаправленной видеокамерой, с применением нейронных сетей.
5. Система автоматического контроля дорожного движения, содержащая по меньшей мере одну узконаправленную камеру для контроля дорожного движения и идентификации транспортных средств в локальной зоне контроля, по меньшей мере одну широкоугольную видеокамеру, процессорный модуль, навигационный модуль и модуль связи, отличающаяся тем, что по меньшей мере одна широкоугольная видеокамера размещена на высоте, превышающей высоту установки по меньшей мере одной узконаправленной видеокамеры, а система выполнена с возможностью синхронизации по времени видеопотоков по меньшей мере одной узконаправленной видеокамеры и по меньшей мере одной широкоугольной видеокамеры, а также дополнительно содержит передатчик видеосигнала, подключенный к по меньшей мере одной широкоугольной видеокамере, блок сопряжения, содержащий приемник видеосигнала, программно-аппаратный модуль видеоаналитики, выполненный с возможностью сопоставления данных, полученных по меньшей мере одной широкоугольной видеокамерой и по меньшей мере одной узконаправленной видеокамерой, и выявления взаимно-однозначного соответствия между траекториями транспортных средств, зафиксированными в протяженной зоне контроля с помощью по меньшей мере одной широкоугольной видеокамеры, и номерными знаками транспортных средств, идентифицированными с помощью по меньшей мере одной узконаправленной видеокамеры, и по меньшей мере три опознака, координаты которых внесены в память модуля видеоаналитики, причем по меньшей мере один опознак размещен в той части зоны контроля, которая является общей для по меньшей мере одной широкоугольной видеокамеры и по меньшей мере одной узконаправленной видеокамеры.
6. Система по п.5, отличающаяся тем, что по меньшей мере одна широкоугольная видеокамера дополнительно оснащена многоцелевым радаром, зона контроля которого по существу совпадает с зоной контроля широкоугольной видеокамеры.
7. Система по п.5, отличающаяся тем, что по меньшей мере одна узконаправленная видеокамера входит в состав устройства фотовидеофиксации.
8. Система по п.5, отличающаяся тем, что она дополнительно содержит центральный опознак, размещенный вблизи точки установки по меньшей мере одной узконаправленной видеокамеры.
9. Система по п.8, отличающаяся тем, что центральный опознак выполнен в виде импульсного прожектора, частота вспышек которого синхронизована с частотой кадров принимаемого видеосигнала, и которые видны на изображении, полученном с помощью по меньшей мере одной широкоугольной видеокамеры.
10. Система по п.8, отличающаяся тем, что каждый опознак содержит импульсный прожектор и связанный с ним встроенный навигационный приемник, причем прожектор выполнен с возможностью кодовой передачи точных значений текущего времени в виде вспышек, комбинации которых видны на изображении, полученном с помощью по меньшей мере одной широкоугольной видеокамеры.
11. Система по п.5, отличающаяся тем, что по меньшей мере одна широкоугольная видеокамера связана с блоком сопряжения посредством проводной либо беспроводной связи.
12. Система по п.5, отличающаяся тем, что опознаки, применяемые для калибровки и совмещения траекторий транспортных средств, полученных по меньшей мере одной широкоугольной и по меньшей мере одной узконаправленной видеокамерами, выполнены с применением радиочастотных меток, обеспечивающих измерение и беспроводную передачу данных о своих координатах.
13. Система по п.5, отличающаяся тем, что по меньшей мере одна широкоугольная видеокамера размещена на высотном строении или винтокрылом беспилотном летательном аппарате.
14. Система по п.5, отличающаяся тем, что по меньшей мере одна широкоугольная видеокамера расположена так, что длинная сторона ее светочувствительного сенсора сориентирована вдоль контролируемой дороги.
15. Система по п.5, отличающаяся тем, что протяженность зоны контроля W входящей в нее широкоугольной видеокамеры связана с высотой и угловыми параметрами ее установки выражением:
где H- высота размещения широкоугольной видеокамеры,
α – угол раскрыва объектива широкоугольной видеокамеры,
β – угол наклона оптической оси широкоугольной видеокамеры вдоль дороги по отношению к нормали.
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2488171C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ВИДЕОКАДРАМ | 2010 |
|
RU2442173C1 |

