Область техники, к которой относится изобретение
Настоящее изобретение относится к области детекторов, предусмотренных для обнаружения несанкционированных предметов или материалов в зоне защищенного доступа. Точнее выражаясь, изобретение касается встраивания металлодетектора индукционного типа и сканера тела, предусмотренного для досмотра лиц на входе или выходе уязвимой зоны, например, пассажиров перед посадкой в аэропортах или лиц, входящих в общественное место, такое как стадион или театр, с целью обнаружения запрещенных предметов, скрытых под одеждой. Такие системы позволяют избежать систематической пальпации.
Уровень техники
Сегодня представляется необходимым с высокой степенью надежности контролировать попытки ввоза запрещенных изделий, в частности, оружия в уязвимую зону или вывоза из нее.
Поставленная таким образом задача охватывает очень широкий спектр ситуаций, в том числе, но не ограничиваясь этим, попытку ввоза запрещенных изделий в защищенную зону, такую как аэропорт, магазин, школа, вокзал, государственная или частная организация, или попытку вывоза изделий за пределы определенного периметра, например, в случае кражи с предприятия или охраняемого предмета.
Существуют различные типы детекторов металлических предметов (металлодетекторов). Как правило, металлодетекторы относятся к индукционному типу детекторов. Они содержат по меньшей мере одну передающую катушку и по меньшей мере одну приемную катушку. На передающую катушку подают переменный электрический ток. Приемная катушка предусмотрена для обнаружения возмущений в магнитном поле, создаваемом передающей катушкой из-за присутствия металлического предмета, например, ослабления амплитуды магнитного поля или даже изменения фазы сигнала, например, из-за вихревых токов (токи Фуко), возникающих на металлическом предмете.
Также было предложено использовать сканеры тела. Самыми ранними из них являются рентгеновские сканеры тела. Более современные сканеры тела используют технологию так называемых миллиметровых волн. Пример сканера тела можно найти в патентном документе ЕР 2202700.
В течение нескольких лет разрабатывались сканеры тела (обычно называемые англосаксонским термином "body scanner") для обнаружения оружия, взрывчатых веществ и т.д., спрятанных под одеждой лиц, проникающих в защищенную зону. Эти сканеры используют технологии, основанные на обнаружении энергий излучения, модулированных, отраженных или испускаемых телом досматриваемых лиц. Используемые энергии излучения представляют собой рентгеновские лучи, микроволны, миллиметровые волны, инфракрасный свет, терагерцовые волны и ультразвук.
Несмотря на использование нескольких типов энергии излучения и геометрии изображения, эти сканеры тела работают по принципу создания электронного изображения человека, на котором одежда прозрачна. Затем это изображение выводят на экран и его просматривает оператор, чтобы определить, несет ли человек целевой предмет. Для этого оператор, обученный обнаружению целевых предметов, должен быть способен определить, соответствуют ли предметы, идентифицированные сканером тела, анатомии человека, разрешенному предмету, такому как зажигалка, носовой платок или монеты, либо целевому предмету, такому как оружие или взрывчатка. Как вариант, для соблюдения права на неприкосновенность досматриваемых лиц, система может содержать программное обеспечение, представляющее собой кодовые инструкции для автоматического анализа изображения и определения наличия каких-либо аномалий и отображения их на аватаре, представляющем человека.
Оказалось, что в настоящее время лица, пытающиеся обманным путем пронести запрещенный предмет, например, оружие, в защищенную зону, проявляют большую изобретательность в сокрытии таких предметов, например, разделяя предмет на различные части и распределяя их по телу. Поэтому обследование с помощью сканеров тела становится все более сложным и длительным, а в некоторых случаях и невозможным, если целевой предмет скрыт таким образом, что его не достигает энергия излучения, например, внутри полости тела или между телом человека и другой поверхностью, через которую не проникает энергия излучения. Кроме того, хотя существующие металлодетекторы являются наиболее эффективным решением для обнаружения наличия или отсутствия металлического предмета, они не могут осуществить локализацию неметаллического предмета на человеке.
Поэтому было предложено объединить металлодетектор со сканером тела, чтобы улучшить обнаружение целевых предметов, которые могут быть замаскированы на теле человека. Как раскрыто в патентном документе ЕР 2202700, комбинированная рамка обычно содержит металлодетектор, размещенный в стойках рамки, и вертикальный сканер, несущий множество датчиков, выполненных с возможностью сканирования человека сверху вниз.
Эта комбинированная рамка позволяет эффективно сочетать несколько технологий внутри одного устройства. Однако действующие стандарты предусматривают требования к свободному пространству внутри детектора, в частности, для того, чтобы инвалидные коляски могли проехать через рамки. Например, согласно Руководству по обеспечению доступности для американцев с ограниченными возможностями (ADAAG, от англ. Americans with Disabilities Act Accessibility Guidelines), проход глубиной меньшей или равной 24 дюйма (610 мм) должен иметь ширину по меньшей мере 32 дюйма (810 мм). И наоборот, если глубина прохода превышает 24 дюйма (610 мм), то ширина прохода должна быть по меньшей мере 36 дюймов (915 мм), чтобы человек в инвалидной коляске мог внутри него развернуться. Для этих размеров существуют и другие стандарты, в частности, итальянские или английские. Однако все они требуют минимальной ширины глубоких проходов коридорного типа по меньшей мере 915 мм.
Эти различные стандарты (далее именуемые "размерными стандартами") должны быть сопоставлены с точностью обнаружения, требуемой на входе в уязвимые зоны. Обычно, в случае металлодетектора, пространство между катушками не может быть равно 915 мм или более, учитывая чувствительность, необходимую для обеспечения достаточного обнаружения целевых предметов.
Для того чтобы соответствовать этим размерным стандартам, было предложено последовательно расположить металлодетектор и сканер тела, чтобы каждая система могла быть рассчитана и оптимизирована индивидуально. Однако из-за электромагнитной несовместимости металлодетектора и сканера тела необходимо располагать металлодетектор на определенном расстоянии от сканера тела. Действительно, сканер тела содержит множество металлических деталей, систем питания и других систем электромагнитного сканирования, способных генерировать низко- и среднечастотные паразитные электромагнитные поля, создающие помехи для индукционных приемных катушек металлодетектора. Кроме того, расстояние между металлодетектором и сканером тела позволяет ограничить риск ложного обнаружения в случае относительного движения, даже субмиллиметрового, между катушками металлодетектора и металлической массой, которая составляет структуру сканера тела и которая намного больше (в 1000-10000 раз), чем масса металлической цели, подлежащей обнаружению. Однако такая конфигурация не только радикально увеличивает площадь, занимаемую всей системой, но и позволяет досматриваемым лицам проходить мимо друг друга внутри системы и/или проходить только через одно из устройств обнаружения или даже менять порядок прохождения (человек, проходящий первым через металлодетектор, может быть обогнан человеком, следующим за ним, до входа в сканер тела, если операторы не проявят бдительность), что полностью искажает результаты обнаружения и информацию, считываемую операторами на выходе системы.
Также было предложено изготовить компактную комбинированную рамку, содержащую передвижные вращающиеся средства обнаружения, установленные в цилиндрической стенке диаметром порядка 1500 мм. Однако вход в эту рамку имеет ширину менее 600 мм и поэтому сам по себе не соответствует требованиям, налагаемым размерными стандартами. Вот почему эту рамку систематически используют вместе с дополнительным детектором, пригодным для проезда инвалидных колясок. Таким образом, общий габаритный размер узла, образованного рамкой, который хоть и компактного, но содержащего дополнительный детектор, остается слишком большим.
Раскрытие сущности изобретения
Целью изобретения является предложить систему обнаружения с помощью двух технологий, обладающую высокой эффективностью обнаружения, которая позволяет с уверенностью применять двойной анализ к каждому контролируемому лицу, ограничивает риск ложного обнаружения, занимает мало места и при этом соблюдает размерные стандарты, позволяющие, в частности, проезд инвалидной коляски.
Для этого, согласно первому аспекту изобретения, предложена система обнаружения с помощью двух технологий, содержащая:
- рамку, содержащую две боковые панели, по существу симметричные относительно плоскости и выполненные с возможностью определения транзитного канала для досматриваемого человека, причем указанные боковые панели содержат последовательно первую часть на уровне входа в канал и вторую часть, проходящую между первой частью и выходом из канала, причем первая часть и вторая часть монолитны, каждая из боковых панелей имеет внутреннюю поверхность, при этом внутренняя поверхность одной из боковой панелей обращена к внешней поверхности другой боковой панели,
- металлодетектор, размещенный в первой части боковых панелей, содержащий передающий узел, выполненный с возможностью излучения магнитного поля, и приемный узел, выполненный с возможностью обнаружения возмущений в магнитном поле, вызванных целевым предметом, и
- сканер тела, размещенный во второй части боковых панелей и содержащий по меньшей мере одну антенну, выполненную с возможностью излучения энергии.
Кроме того, внутри первой части внутренние поверхности боковых панелей разделены расстоянием, по меньшей мере равным 800 мм и меньшим или равным 900 мм, а внутри второй части максимальное расстояние между внутренними поверхностями боковых панелей больше или равно 1000 мм и меньше или равно 1200 мм.
Ниже приведены некоторые предпочтительные, но не ограничивающие признаки системы обнаружения в соответствии с первым аспектом, по отдельности или в комбинации:
- внутри второй части расстояние между внутренними поверхностями боковых панелей постепенно увеличивается до максимального, а затем постепенно уменьшается по направлению к выходу из канала.
- внутренние поверхности панелей являются по существу изогнутыми или частично плоскими.
- радиус кривизны внутренних поверхностей боковых панелей во второй части составляет 180-220 см.
- глубина первой части составляет 250-350 мм, предпочтительно порядка 300 мм.
- расстояние между внутренними поверхностями на уровне первой части равно 820 мм.
- общая глубина боковых панелей между входом и выходом канала составляет 1600-1800 мм, например, порядка 1760 мм.
- по меньшей мере одна антенна сканера тела выполнена с возможностью передачи миллиметровых волн.
- сканер тела содержит сеть антенн, причем указанные антенны расположены вдоль изогнутой поверхности.
- изогнутая поверхность полностью или частично соответствует внутренней поверхности второй части одной из боковых панелей.
- кроме того, система обнаружения содержит процессорный блок, выполненный с возможностью генерирования единого изображения на основе сигналов, генерируемых металлодетектором и электронного изображения, создаваемого сканером тела.
- внутренние поверхности боковых панелей являются по существу плоскими и параллельными на уровне первой части.
- кроме того, каждая первая и вторая панель содержит металлический защитный экран, расположенный между передающим узлом и/или приемным узлом с одной стороны и по меньшей мере одной антенной с другой стороны.
- защитный экран изготовлен из материала, имеющего электропроводность больше или равную 35*10^6 См/м.
- металлодетектор непрерывного или импульсного излучения.
- каждая панель содержит металлическое основание, на котором смонтированы передающий узел, приемный узел и антенны таким образом, что все они неподвижно закреплены друг относительно друга.
- металлические основания механически соединены таким образом, что они неподвижно закреплены друг относительно друга.
- металлические основания соединены на уровне земли по меньшей мере одной поперечиной.
- по меньшей мере одна поперечина является металлической, причем указанная по меньшей мере одна поперечина в месте соединения с каждой панелью закрыта электроизолирующей втулкой.
- по меньшей мере одна поперечина полностью или частично закрыта втулкой.
- по меньшей мере одна поперечина размещена на платформе, проходящей между панелями.
Краткое описание чертежей
Дополнительные признаки, цели и преимущества изобретения будут очевидны из следующего раскрытия, которое является исключительно иллюстративным и не ограничивающим, и которое следует рассматривать в сочетании с прилагаемыми чертежами, на которых:
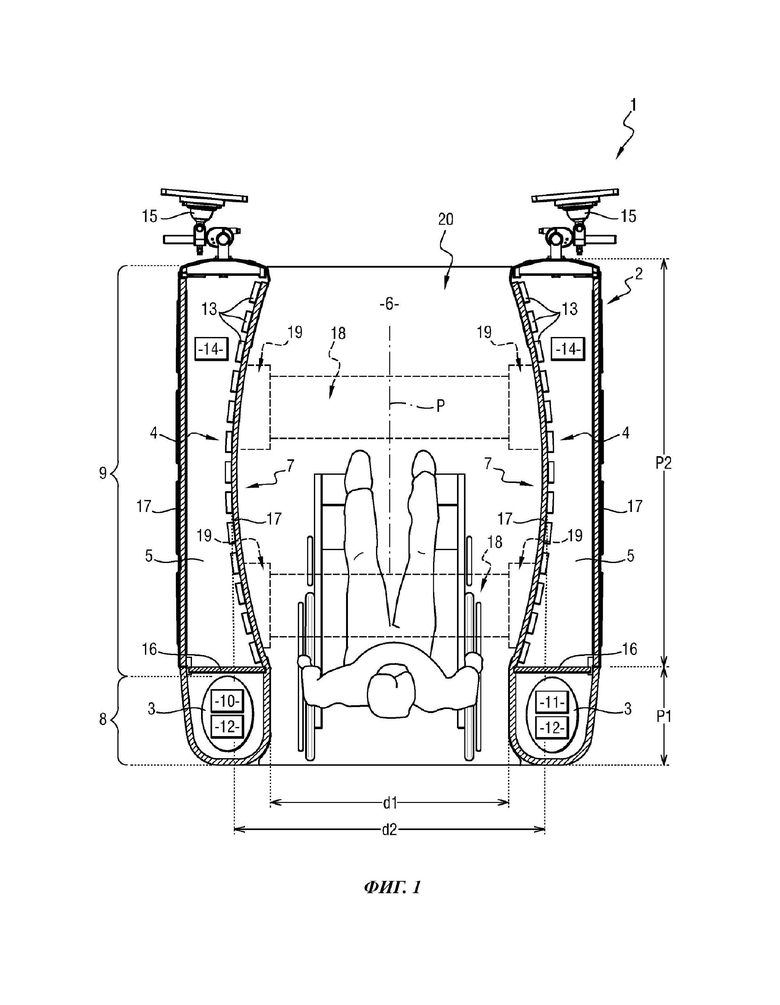
На фиг. 1 показан схематический вид в поперечном разрезе примерной системы обнаружения в соответствии с первым вариантом осуществления изобретения, на котором некоторые элементы, скрытые под платформой, показаны пунктиром. Для примера также показан человек в инвалидной коляске на входе в транзитный канал;
На фиг. 2 показан вид в аксонометрии другой примерной системы обнаружения в соответствии с одним из вариантов осуществления изобретения;
На фиг. 3 показан схематический вид в поперечном разрезе примерной системы обнаружения в соответствии со вторым вариантом осуществления изобретения; и
На фиг. 4 показан обзорный вид примерной системы обнаружения в соответствии с одним из вариантов осуществления изобретения.
На всех чертежах аналогичные элементы имеют одинаковые ссылочные позиции.
Осуществление изобретения
Система 1 обнаружения с помощью двух технологий содержит рамку 2, в которой размещены металлодетектор 3 непрерывного или импульсного излучения и сканер 4 тела. Поэтому металлодетектор 3 и сканер 4 тела оба встроены в одну и ту же конструкцию, что позволяет уменьшить общий габаритный размер системы 1. Кроме того, благодаря встраиванию металлодетектора 3 и сканера 4 тела в одну и ту же рамку 2, металлодетектор 3 и сканер 4 тела являются монолитными друг с другом, что устраняет любой риск относительного движения между этими двумя устройствами и значительно повышает стабильность системы 1 обнаружения. Кроме того, поскольку в системе 1 обнаружения нет промежутка между металлодетектором 3 и сканером 4 тела, то у досматриваемых лиц нет другого выбора, кроме как пройти последовательно через систему 1, через два устройства 3, 4 обнаружения и в надлежащем порядке (как правило, сначала через металлодетектор 3, а затем через сканер 4 тела).
Рамка 2
Рамка 2 содержит первую боковую панель 5 и вторую боковую панель 5, по существу симметричные относительно плоскости Р и выполненные с возможностью определения между ними транзитного канала 6 для досматриваемого лица. Боковые панели 5 могут быть механически соединены потолком так, чтобы образовать моноблок. Как вариант, боковые панели 5 могут быть отдельными и разными.
Каждая панель 5 имеет внутреннюю поверхность 7, обращенную к транзитному каналу 6. Точнее, внутренняя поверхность 7 первой панели 5 обращена к внутренней поверхности 7 второй панели 5 таким образом, чтобы разграничить с боков канал 6. Кроме того, каждая из панелей 5 имеет первый или входной конец, которые вместе определяют вход в канал 6 для досматриваемого лица, и второй или выходной конец, который находится напротив входного конца и определяет выход из канала 6.
Панели 5 содержат последовательно, от входа к выходу, первую часть 8, в которой размещен металлодетектор 3 и которая расположена на уровне входа в канал 6, и вторую часть 9, в которой находится сканер 4 тела и которая проходит между первой частью 8 и выходом из канала 6.
Для того чтобы получить эффективную систему 1 обнаружения с небольшими габаритами, внутренние поверхности 7 панелей 5 разделены расстоянием d1, которое больше или равно 800 мм и меньше или равно 900 мм, внутри первой части 8, а затем максимальным расстоянием d2, которое больше или равно 1000 мм и меньше или равно 1200 мм внутри второй части 9.
Здесь расстояния d1, d2 между внутренними поверхностями 7 боковых панелей 5 измерены вдоль осей, нормальных к плоскости Р симметрии рамки 2.
В первом варианте осуществления, показанном на фиг. 3, внутренние поверхности 7 панелей 5 являются по существу плоскими и параллельными на уровне первой части 8 и второй части 9. Переход между внутренними поверхностями 7 внутри первой части 8 и внутри второй части 9 может быть постепенным, как показано на фиг. 3, или резким (плечо, образующее изгиб в месте сопряжения между первой и второй частями 8, 9).
А качестве варианта и как будет подробно раскрыто ниже, для повышения эффективности обнаружения и, в частности, способности исследования человека, досматриваемого сканером 4 тела, внутренние поверхности 7 изогнуты на уровне второй части 9 таким образом, что расстояние между внутренними поверхностями 7 на уровне второй части 9 боковых панелей 5 постепенно увеличивается от места сопряжения с первой частью 8 до максимального расстояния d2, а затем постепенно уменьшается в направлении выхода из канала 6. В этом варианте осуществления, показанном, в частности, на фиг. 1, внутренние поверхности 7 панелей 5 остаются по существу плоскими и параллельными на уровне первой части 8. При необходимости внутренние поверхности 7 могут быть частично плоскими внутри второй части 9, при этом их участки вместе образуют канал 6, расходящийся, а затем сходящийся, от места сопряжения между первой и второй частями 8, 9 по направлению к выходу. Для этого внутри второй части 9 внутренние поверхности 7 могут, например, содержать последовательно по меньшей мере один плоский участок, наклонный относительно плоскости симметрии Р так, что канал 6 расходится (относительно направления прохода в рамке 4, т.е. от входа к выходу канала 6), затем плоский участок, по существу параллельный плоскости симметрии Р, и по меньшей мере один участок, наклонный относительно плоскости Р так, что канал сходится к выходу.
Ниже изобретение будет раскрыто более подробно со ссылкой на вариант осуществления, в котором внутренние поверхности 7 изогнуты на уровне второй части 9. Однако это не является ограничением, поскольку внутренние поверхности 7 могут быть плоскими внутри этой второй части 9 или частично плоскими.
Таким образом, первая часть 8 рамки 2, в которой размещен металлодетектор 3, обеспечивает достаточную чувствительность для обнаружения металла при соблюдении действующих размерных стандартов. В одном из вариантов осуществления изобретения расстояние d1 между внутренними поверхностями 7 в первой части 8 составляет порядка 820 мм (с точностью до 3%).
Глубина Р1 (размер в плоскости Р симметрии рамки 2, проходящей вдоль направления движения досматриваемого лица в транзитном канале 6) первой части 8 составляет 250-350 мм, предпочтительно порядка 300 мм (с точностью до 3%). Эта ограниченная глубина Р1 первой части 8 фактически достаточна для размещения металлодетектора 3, при этом соблюдены текущие размерные стандарты, поскольку эта первая часть 8 не будет считаться коридором.
Однако транзитный канал 6 шире на уровне второй части 9 рамки 2, в которой расположен сканер 4 тела, чтобы позволить инвалидной коляске въехать и развернуться между боковыми панелями 5 так, чтобы расположить досматриваемого человека лицом к любой боковой панели 5.
Как отмечалось выше, внутренние поверхности 7 боковых панелей 5 изогнуты. В одном из вариантов осуществления изобретения радиус кривизны внутренних поверхностей 7 составляет 180-220 см.
В одном из вариантов осуществления изобретения расстояние между внутренними поверхностями 7 равномерно увеличивается (при необходимости частично) от места сопряжения между первой частью 8 (в которой внутренние поверхности 7 по существу параллельны) и второй частью 9 до достижения максимума, соответствующего максимальному расстоянию d2, а затем равномерно уменьшается (при необходимости частично) от этого максимума до выходного конца панелей 5. Опционально расстояние между внутренними поверхностями 7 на уровне выходного конца по существу равно расстоянию d1 между внутренними поверхностями 7 на уровне первой части 8.
В одном из вариантов осуществления изобретения глубина Р2 второй части 9 боковых панелей 5 составляет 1100-1300 мм. Когда глубина Р1 первой части 8 составляет порядка 300 мм, а радиус кривизны внутренних поверхностей 7 составляет порядка 180 см и 220 см, глубина Р2 второй части 9 может составлять, например, порядка 1150 мм. Из этого следует, что общая глубина (Р1+Р2) системы 1 больше или равна 1400 мм и меньше или равна 1600 мм, например, порядка 1450 мм.
Таким образом, площадь системы 1 значительно уменьшена по сравнению с комбинированными системами предшествующего уровня техники, при этом металлодетектор 3 и сканер 4 тела встроены в одну и ту же рамку 2 и соответствуют современным размерным стандартам (в частности, ADAAG).
Металлодетектор 3
Металлодетектор 3 состоит из передающего узла 10, приемного узла 11 и аналитических средств 12. Передающий узел 10 содержит по меньшей мере одну передающую катушку, размещенную в первой панели 5 и выполненную с возможностью излучения магнитного поля. Приемный узел 11 содержит по меньшей мере одну приемную катушку, размещенную во второй панели 5, которая выполнена с возможностью обнаружения возмущений магнитного поля, вызванных металлическими предметами. Наконец, аналитические средства 12 выполнены с возможностью анализа сигналов, исходящих от приемных катушек, с целью обнаружения присутствия металлических предметов, переносимых лицом, проходящим через указанный канал 6, образованный между двумя боковыми панелями 5.
Как известно, передающая и приемная катушки предпочтительно охватывают всю высоту боковых панелей 5. Они могут быть предметом многочисленных известных вариантов осуществления изобретения, используемых в настоящее время в традиционных рамках 2s арочных металлодетекторов. Они функционируют также традиционным образом. Поэтому структура и работа передающих и приемных катушек не будут подробно раскрыты ниже. Однако следует отметить, что предпочтительно каждая передающая или приемная катушка может быть образована несколькими отдельными витками, относительное распределение которых по высоте боковых панелей 5 выполнено с возможностью оптимизации обнаружения и управляется аналитическими средствами 12, при необходимости через передающий интерфейс 10а и приемный интерфейс 11а, для излучения переменных индукционных полей в диапазоне частот и для приема всех этих переменных индукционных полей в указанном диапазоне частот, соответственно.
В одном из вариантов осуществления изобретения индукционные поля, генерируемые передающими и приемными катушками, находятся в диапазоне частот 70-50 кГц, предпочтительно 100-50 кГц.
На практике каждая из передающих и приемных катушек может быть сформирована из множества элементарных катушек или витков, охватывающих соответствующую часть высоты в первой части 8 соответствующей панели 5, чтобы обеспечить возможность распознавания положения обнаруженных металлических целевых предметов и, таким образом, локализации этих целевых предметов по высоте.
Кроме того, каждая из катушек предпочтительно является попеременно передатчиком и приемником.
В случае, когда первая и вторая панели 5 являются отдельными и разными, металлодетектор 3 дополнительно содержит передающие средства, содержащие интерфейс беспроводной связи, выполненный с возможностью передачи на передающий узел 10 или на приемный узел 11 сигнала фазового выравнивания, чтобы выровнять фазу тактового генератора приемного узла 11 с фазой тактового генератора передающего узла 10. Для получения более подробной информации о данной конфигурации рамки 2 можно сослаться, в частности, на патентную заявку FR 1906685, поданную 20 июня 2019 года от имени заявителя.
Чтобы избежать электромагнитных помех, которые может генерировать сканер 4 тела, система 1 может дополнительно содержать защитный экран 16, расположенный между металлодетектором 3 и сканером 4 тела. Предпочтительно, каждая панель 5 может содержать такой защитный экран 16. Например, защитный экран 16 может представлять собой сплошной вертикальный металлический профиль, который может иметь, например, прямоугольное сечение и проходить по всей или части высоты (размер, расположенный в плоскости симметрии Р и перпендикулярный земле) панелей 5, между передающим узлом 10 (соответственно, приемным узлом 11) металлодетектора 3 и антеннами 13. Как правило, защитные экраны 16 могут быть расположены в месте сопряжения между первой частью 8 и второй частью 9 панелей 5. Защитные экраны 16, используемые в системах 1 обнаружения, обычно изготавливают из материала (проводящего или непроводящего) с высокой магнитной проницаемостью. Однако, поскольку такие материалы способны деформировать линии потока магнитного поля, излучаемого и принимаемого катушками металлодетектора 3, то защитные экраны 16 предпочтительно изготавливают из металлического материала с высокой электропроводностью. Под высокой электропроводностью здесь понимают электропроводность не менее 35*10^6 См/м.
Предпочтительно, для повышения эффективности экранирования указанный защитный экран 16 проходит по всей высоте передающего узла 10 (соответственно, приемного узла 11) металлодетектора 3.
Для дальнейшего улучшения соотношения сигнал/шум металлодетектора 3, катушки могут быть расположены во внутренней части полости панели 5, в которой они установлены, чтобы минимизировать расстояние между передатчиком и приемником и получить максимальную однородность индукционного поля. Преимущество такого расположения состоит также в том, что те же катушки находятся на удалении от внешней поверхности системы 1, что повышает ее невосприимчивость к внешним металлическим массам, находящимся в движении.
Сканер 4 тела
Сканер 4 тела содержит по меньшей мере одну антенну 13, выполненную с возможностью излучения энергии, предпочтительно микроволн, таких как миллиметровые волны, рентгеновские лучи, терагерцовые волны и т.д. В одном из вариантов осуществления изобретения сканер 4 тела содержит сеть антенн 13, расположенную вблизи внутренней поверхности 7 первой и/или второй панели 5. Таким образом, сеть антенн 13 в значительной степени повторяет форму соответствующей внутренней поверхности 7. Заявитель обнаружил, что расположение антенн 13 вдоль изогнутой поверхности (с равномерной или частичной кривизной), а не плоской поверхности, позволяет повысить эффективность работы сканера 4 тела по сравнению со сканером 4 тела, имеющим плоские внутренние поверхности 7. Действительно, благодаря своему изогнутому расположению, антенны 13 сканера 4 тела воздействуют на более значительную поверхность тела досматриваемого человека, тем самым увеличивая досматриваемую поверхность на электронном изображении и, следовательно, возможности обнаружения целевого предмета.
Предпочтительно, антенны 13 излучают миллиметровые волны. Миллиметровые волны подходят для обнаружения металлических и неметаллических предметов, например, выполненных из керамики. Кроме того, воздух и другие материалы, например, используемые при изготовлении одежды, прозрачны для такого излучения. Из этого следует, что миллиметровые волны можно использовать для обнаружения предметов, скрытых под одеждой. При использовании досматриваемый человек подвергается воздействию импульсов миллиметровых волн, генерируемых по меньшей мере одной из антенн 13, предпочтительно несколькими антеннами 13. Эти волны взаимодействуют с телом человека, его одеждой и любыми скрытыми предметами, которые этот человек может спрятать под одеждой. Это взаимодействие изменяет энергию волн, которые, отразившись, возвращаются к антенне (антеннам) 13, выполняющим роль приемника. Затем энергия, отраженная от каждой части тела досматриваемого человека, анализируется для создания его электронного изображения, при этом одежда человека является практически прозрачной.
Кроме того, сканер 4 тела содержит аналитические средства 14, выполненные с возможностью приема сигнала, представляющего отраженную энергию, измеренную антеннами 13, при необходимости через сетевой интерфейс 13а, и получения электронного изображения.
В одном из вариантов осуществления изобретения система 1 обнаружения, кроме прочего, содержит по меньшей мере один процессорный блок 15, выполненный с возможностью использования сигналов обнаружения, генерируемых металлодетектором 3 и сканером 4 тела. При необходимости процессорный блок содержит аналитические средства 12, 14 металлодетектора 3 и сканера 4 тела и выполнен с возможностью генерирования на выходе единого изображения на основе сигналов, генерируемых металлодетектором 3 и электронного изображения, создаваемого сканером 4 тела. Кроме того, при необходимости система 1 содержит по меньшей мере один экран 21, 22, выполненный с возможностью отображения полученного таким образом единого изображения. Экран 21, 22 может быть смонтирован на рамке 2, например, на уровне выходного конца одной из боковых панелей 5, или, как вариант, размещен удаленно и взаимодействовать через беспроводной или проводной интерфейс с процессорным блоком 15.
В примерном варианте осуществления изобретения, показанном на фиг. 1, система 1 содержит, например, первый процессорный блок 15, связанный с первым экраном, выполненный с возможностью генерирования на выходе единого изображения на основе сигналов, генерируемых металлодетектором 3 и электронного изображения, создаваемого сканером 4 тела одной из панелей 5, и второй процессорный блок 15, связанный со вторым экраном, выполненный с возможностью генерирования на выходе единого изображения на основе сигналов, генерируемых металлодетектором 3 и электронного изображения, создаваемого сканером 4 тела другой панели 5. В примерном варианте осуществления изобретения, показанном на фиг. 4, один и тот же процессорный блок 15 выполнен с возможностью генерирования обоих электронных изображений.
Для дальнейшего повышения стабильности системы 1 обнаружения, катушки передающего узла 10 и приемного узла 11 металлодетектора 3, а также антенны 13 сканера 4 тела могут быть жестко закреплены на общем основании 17 в каждой панели 5.
В одном из вариантов осуществления изобретения каждое основание 17 содержит немагнитную металлическую пластину, чтобы избежать искажения линий магнитного потока, генерируемых металлодетектором 3, и имеет увеличенную толщину. Например, каждое основание 17 может содержать алюминиевую пластину толщиной не менее 1 см, например, 2 см. Каждое основание 17 предпочтительно проходит на всю глубину соответствующей панели 5, т.е. между входом и выходом канала 6. В одном из вариантов осуществления изобретения каждое основание 17 смонтировано на уровне (или даже напротив) внутренней поверхности 7 соответствующей панели 5.
Кроме того, для предотвращения относительного перемещения между двумя панелями 5 системы 1, оба основания 17 могут быть механически и жестко соединены. Действительно, относительные перемещения между основаниями 17 способны вызвать ложные срабатывания металлодетектора 3 или сканера 4 тела. При необходимости для дальнейшего повышения устойчивости рамки 2, панели 5 соединяют между собой в верхней части потолком. Например, основания 17 могут быть механически соединены с помощью металлической поперечины 18, проходящей между панелями 5 на уровне земли. Как правило, в примерном варианте осуществления изобретения основания 17 механически соединены на уровне земли двумя металлическими поперечинами 18. Поперечины 18 могут быть изготовлены, например, из стали.
В одном из вариантов осуществления изобретения, чтобы это соединение, выполненное из металла, не образовывало электрическую петлю большого размера с нестабильным сопротивлением вблизи индукционных катушек металлодетектора 3 и, следовательно, не создавало риск дополнительных ложных срабатываний, все или часть поперечин 18 могут быть электрически изолированы. Например, все или часть поперечин 18 могут быть закрыты втулкой 19, изготовленной из непроводящего материала, как правило, пластика. Предпочтительно, по меньшей мере та часть оснований 17, которая проходит до стыка между поперечинами 18 и основаниями 17, электрически изолирована такой втулкой 19.
Опционально защитный экран 16 жестко прикреплен к соответствующему основанию 17, чтобы обеспечить минимизацию или отсутствие относительного перемещения между антеннами 13 и передающим узлом 10, и приемным узлом и, следовательно, исключить электромагнитные помехи на катушках металлодетектора 3 и связанные с этим ложные срабатывания.
При необходимости основание 17 может также проходить вдоль внешней поверхности соответствующей панели 5. В этом случае защитный экран 16 может быть закреплен на части основания, проходящей вдоль этой внешней поверхности.
Кроме того, чтобы досматриваемые лица не спотыкались при прохождении через канал, рамка 4 может дополнительно содержать платформу 20, проходящую между панелями 5 и закрывающую поперечины 18. Опционально, чтобы ходьба по платформе 20 не могла передавать вибрации на конструкцию системы 1, платформа 20 может быть механически изолирована от конструкции рамки 2 по всему периметру, например, путем крепления платформы 20 к земле.
Как известно, система 1 дополнительно содержит блок питания и интерфейса (БПИ), подключенный к электрической сети и, при необходимости, к сети связи.



Изобретение относится к области детекторов. Технический результат заключается в повышении эффективности обнаружения, ограничивая риск ложного обнаружения. Система содержит рамку, металлодетектор, размещенный в первой части боковых панелей, сканер тела миллиметрового диапазона, размещенный во второй части боковых панелей и содержащий по меньшей мере одну антенну, выполненную с возможностью излучения энергии, при этом внутри первой части внутренние поверхности боковых панелей разделены расстоянием, которое по меньшей мере равно 800 мм и меньше или равно 900 мм, а внутри второй части максимальное расстояние между внутренними поверхностями боковых панелей больше или равно 1000 мм и меньше или равно 1200 мм. 19 з.п. ф-лы, 4 ил.
1. Система (1) двойной технологии для обнаружения несанкционированных предметов или материалов в зоне защищенного доступа, содержащая:
- рамку (2), содержащую две боковые панели (5), по существу симметричные относительно плоскости (P) и выполненные с возможностью определения транзитного канала (6) для досматриваемого лица, при этом каждая из боковых панелей (5) имеет первый конец, которые вместе определяют вход в транзитный канал (6), и второй конец, который находится напротив первого конца и определяет выход из транзитного канала (6), причем боковые панели (5) содержат последовательно первую часть (8) на уровне входа в канал (6) и вторую часть (9), проходящую между первой частью (8) и выходом из канала (6), причем первая часть (8) и вторая часть (9) монолитны, и каждая из боковых панелей (5) имеет внутреннюю поверхность (7), при этом внутренняя поверхность (7) одной из боковых панелей (5) обращена к внутренней поверхности другой боковой панели (5),
- металлодетектор (3), размещенный в первой части (8) боковых панелей (5), содержащий передающий узел (10), выполненный с возможностью излучения магнитного поля, и приемный узел (11), выполненный с возможностью обнаружения возмущений магнитного поля, вызванных целевым предметом,
- сканер (4) тела, размещенный во второй части (9) боковых панелей (5) и содержащий по меньшей мере одну антенну (13), выполненную с возможностью излучения энергии,
отличающаяся тем, что:
- внутри первой части (8) внутренние поверхности (7) боковых панелей (5) разделены расстоянием (d1), которое, по меньшей мере, равно 800 мм и меньше или равно 900 мм,
- внутри второй части (9) максимальное расстояние (d2) между внутренними поверхностями (7) боковых панелей (5) больше или равно 1000 мм и меньше или равно 1200 мм,
при этом внутри второй части (9) расстояние между внутренними поверхностями (7) на уровне второй части (9) боковых панелей (5) постепенно увеличивается от места сопряжения с первой частью (8) до максимального расстояния (d2), а затем постепенно уменьшается в направлении выхода из канала (6).
2. Система по п. 1, в которой внутренние поверхности (7) панелей (5) по существу изогнутые или частично плоские.
3. Система по п. 2, в которой радиус кривизны внутренних поверхностей (7) боковых панелей (5) во второй части (9) составляет 180-220 см.
4. Система по любому из пп. 1-3, в которой глубина (P1) первой части (8) составляет 250-350 мм, предпочтительно порядка 300 мм.
5. Система по любому из пп. 1-4, в которой расстояние между внутренними поверхностями (7) на уровне первой части (8) равно 820 мм.
6. Система по любому из пп. 1-5, в которой общая глубина (P1 + P2) боковых панелей (5) между входом и выходом канала (6) составляет 1600-1800 мм, например порядка 1760 мм.
7. Система по любому из пп. 1-6, в которой по меньшей мере одна антенна (13) сканера (4) тела выполнена с возможностью передачи миллиметровых волн.
8. Система по любому из пп. 1-7, в которой сканер (4) тела содержит сеть антенн (13), расположенных вдоль изогнутой поверхности (7).
9. Система по п. 8, в которой изогнутая поверхность полностью или частично соответствует внутренней поверхности (7) второй части (9) одной из боковых панелей (5).
10. Система по любому из пп. 1-9, дополнительно содержащая процессорный блок (15), выполненный с возможностью генерирования единого изображения на основе сигналов, генерируемых металлодетектором (3), и электронного изображения, создаваемого сканером (4) тела.
11. Система по любому из пп. 1-10, в которой внутренние поверхности (7) боковых панелей (5) являются по существу плоскими и параллельными на уровне первой части (8).
12. Система по любому из пп. 1-11, в которой первая и вторая панели (5) дополнительно содержат металлический защитный экран (16), расположенный между передающим узлом (10) и/или приемным узлом (11) с одной стороны и по меньшей мере одной антенной (13) с другой стороны.
13. Система по п. 11, в которой защитный экран (16) изготовлен из материала, имеющего электропроводность больше или равную 35*10^6 См/м.
14. Система по любому из пп. 1-13, в которой используется металлодетектор (3) непрерывного или импульсного излучения.
15. Система по любому из пп. 1-14, в которой каждая панель (5) имеет металлическое основание (17), на котором смонтированы передающий узел (10), приемный узел (11) и антенны (13) таким образом, что все они неподвижно закреплены относительно друг друга.
16. Система по п. 15, в которой металлические основания (17) механически соединены таким образом, что они неподвижно закреплены относительно друг друга.
17. Система по п. 16, в которой металлические основания (17) соединены на уровне земли по меньшей мере одной поперечиной (18).
18. Система по п. 17, в которой по меньшей мере одна поперечина (18) является металлической, причем указанная по меньшей мере одна поперечина (18) в месте соединения с каждой панелью (5) закрыта электроизолирующей втулкой (19).
19. Система по п. 18, в которой по меньшей мере одна поперечина (18) полностью или частично закрыта втулкой (19).
20. Система по любому из пп. 18 или 19, в которой по меньшей мере одна поперечина размещена на платформе (20), проходящей между панелями (5), причем указанная платформа (20) механически изолирована от панелей (5).
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| CN 109116433 A, 01.01.2019 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЗАПРЕЩЁННЫХ ПРЕДМЕТОВ АРОЧНЫМ МЕТАЛЛОДЕТЕКТОРОМ | 2015 |
|
RU2589238C1 |

