Изобретение относится к системам контроля и регулирования работы персонала, в частности, мониторингу качества работы подвижного персонала при выполнении процедур осмотра, охраны, обходов и диагностики объектов и/или участков территории производства.
Из уровня техники известна система регулирования перемещения персонала в процессе контроля удаленных технологических объектов (патент RU 145 399 U1, МПК G07C 9/00, дата публикации 20.09.2014 г.), содержащая контролируемый модуль, модуль регулируемого считывания контролируемых данных персоналом, блок управления и модуль интегральной оценки и принятия решения. Указанная система обеспечивает одновременную фиксацию местоположения персонала в схеме маршрута и информации о технологических параметрах соответствующего технологического объекта и формирование решения о корректировке маршрута в нештатных ситуациях.
Недостатками данного технического решения следует считать отсутствие возможности построения тепловой карты в режиме реального времени, а также определение местоположения сотрудника с его идентификацией (ФИО). Причем определение человека, а именно конкретного сотрудника осуществляется путем GPS на каком-либо устройстве, что увеличивает возможность “потери” с видимости сотрудника.
Технический результат: построение оптимального маршрута рабочего/персонала за счет видеоаналитики данных в режиме реального времени.
Технический результат заявляемого изобретения достигается тем, что система локального позиционирования людей на территории закрытого и открытого типа содержит, как минимум одну видеокамеру, передающую видеопоток посредством предустановленного на процессоре сервера обработки видеопотока программного обеспечения на указанный сервер, который содержит модуль раскадровки, выполненный с возможностью получения видеопотока и одновременной передачи обработанных данных на сервер обработки данных в модуль построения тепловой карты и модуль детекции нашивок-идентификаторов, выполненных с возможностью одновременной обработки данных, при этом модуль построения тепловой карты содержит связанные между собой последовательно модули: модуль перевода изображения из цветного в черно-белый формат каждого кадра, модуль считывания кадров n-1 c n, выполненный с возможностью сравнения между предыдущими кадрами с предшествующими, модуль детекции объекта, связанный с модулем устранения «шума», который выполнен с возможностью устранения помех для построения теплового следа, и который связан с модулем сложения кадров и окраски разницы; при этом модуль детекции объекта, выполнен с возможностью определения движущийся объект при помощи модели машинного обучения YOLOv5, расположенной на сервере обработки данных; модуль детекции нашивок-идентификаторов содержит модуль классификации нашивки-идентификатора, который связан с модулем детекции конкретного объекта; причем модуль детекции конкретного объекта связан с модулем сложения кадров и окраски разницы через модуль устранение «шума»; причем модуль классификации нашивки связан с модулем детекции конкретного объекта, который связан с базой данных хранения информации, которая располагается на сервере обработки данных; модуль объединения результатов, связанный с модулями детекции нашивок-идентификаторов и тепловой карты, результаты с которого передаются по пути односторонней связи в модуль вывода результата в интерфейс пользователя.
В частном случае исполнения нашивки-идентификаторы выполнены в виде тканевых или тканеподобных нашивок любой геометрической формы.
Наличие в системе модуля детекции нашивки позволяет идентифицировать работника и его передвижения по территории, тем самым обеспечить возможность оптимального построения его маршрута передвижения. Также наличие связи данного модуля с базой данных хранения информации позволяет точно идентифицировать конкретного сотрудника и сделать оптимальным его передвижения без вреда для остальных сотрудников.
Наличие в системе модели машинного обучения, например, YOLOv5 позволяет точно определить объект движения, причем данная модель работает на данных, загруженных в нее, и обучается на них же, а это значит, что идентифицировать как объекты движения можно и персонал, и технику, что позволит также сделать маршруты передвижения оптимальными.
Наличие в системе непосредственных нашивок-идентификаторов (далее нашивки), которые могут идентифицировать камеры, позволяет снизить нагрузку на сервер обработки информации путем того, что сами нашивки не являются техническим оборудованием, а значит, исключена возможность сбоя работы системы, “потери из вида” какой-либо штатной единицы, как сотрудника, так и техники. Таким образом, система будет “видеть” всех. Сами нашивки могут быть выполнены в виде тканевых или тканеподобных нашивок круглой, квадратной, треугольной формы, или, к примеру, логотипа, разного цвета (для различия на базе крупного предприятия каждого сотрудника и его принадлежности к рабочей группе).
Наличие возможности задания коэффициента для окраски разницы кадров в модуле сложения кадров и окраски разницы позволяет выбрать любой цвет и оттенок тепловой карты, при этом наиболее частый маршрут путем наложения цвета будет иметь наиболее яркий цвет.
Наличие двух параллельных процессов: построение тепловой карты и детекция нашивок, объединение их результатов обеспечивает построение оптимального маршрута рабочего/персонала за счет видеоаналитики данных в режиме реального времени. Так, построение тепловой карты обеспечивает построение маршрута движущегося объекта, а детекция нашивки на нем, идентифицирует конкретный объект. Причем оба процесса имеют возможность автономно работать независимо друг от друга. При выходе из строя одного из процессов, другой будет работать.
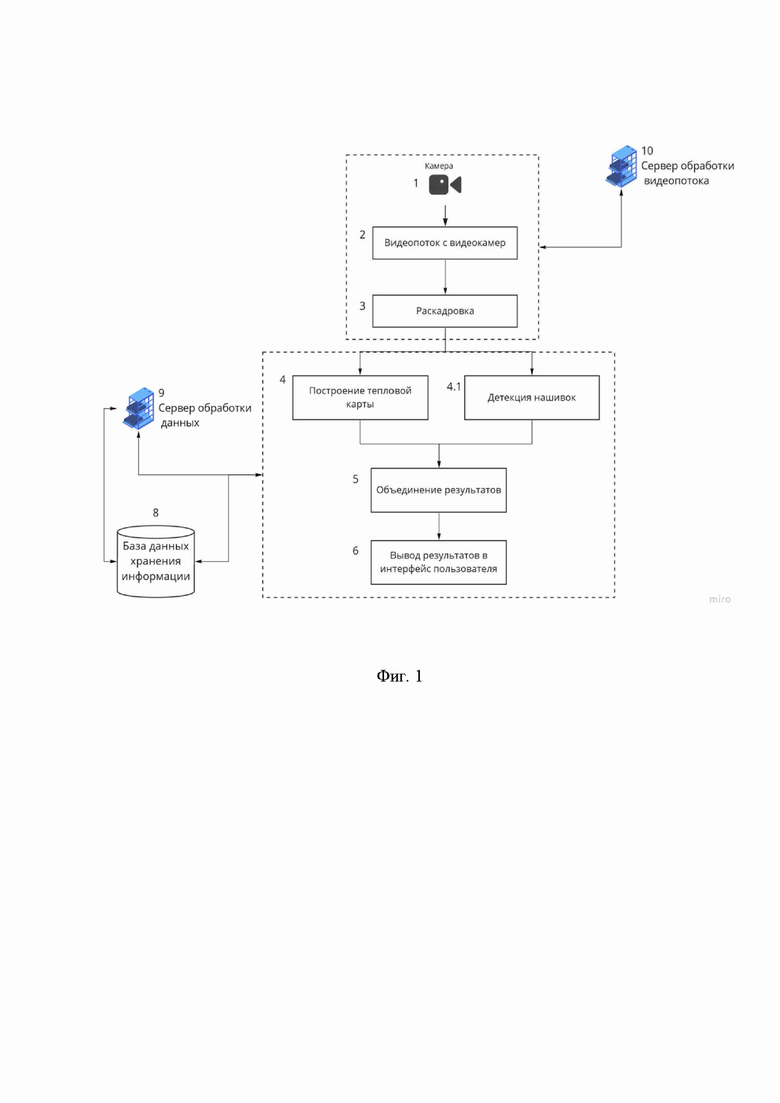
Сущность изобретения поясняется графическим материалом, где на фиг. 1 представлена система локального позиционирования людей на территории закрытого и открытого типа в общем виде; на фиг. 2 - развернутая схема модулей построения тепловой карты и детекции нашивок, где обозначены следующие позиции; на фиг. 3 - детектирование человека по метке; на фиг. 4 - - тепловая карта:
1 - Камера;
2 - Видеопоток с видеокамер;
3 - Раскадровка;
4 - Построение тепловой карты (Тепловая карта – один из эффективных инструментов видеоаналитики. Она позволяет в одном кадре получить исчерпывающую информацию о движении в поле зрения камеры за определенный период.);
4.1 - Детекция нашивок;
4.2 - Перевод изображения из цветного в черно-белый формат;
4.3 - Сличение кадров n-1 c n;
4.4 - Детекция объекта;
4.5 - Устранение "шума";
4.6 - Сложение кадров и окраска разницы;
4.7 - Классификация нашивки;
4.8 - Детекция конкретного объекта;
5 - Объединение результатов;
6 - Вывод результатов в интерфейс пользователя;
7 - Модель машинного обучения YOLOv5;
8 - База данных хранения информации;
9 - Сервер обработки данных;
10 - Сервер обработки видеопотока.
Ниже представим пример работы данной системы. При этом следует учитывать, что в контексте данной заявки YOLOv5 - нейросетевая модель машинного обучения (далее по тексту модель машинного обучения). В контексте данной заявки как пример будет рассматриваться помещение закрытого типа, например цех, с численностью сотрудников более 10 человек.
Выбирается точка для установки камеры 1, таким образом, чтобы в зону видимости данной камеры 1 входила наибольшая площадь.
Установленная камера 1 подключается к серверу 10 обработки видеопотока, где при помощи предустановленного на процессоре программного обеспечения данные с камеры 1 поступают в модуль 2 видеопоток с видеокамер.
После чего необходимо разделить на кадры весь видеопоток, для этого данные с модуля 2 видеопотока с камер направляются в модуль 3 раскадровки от 1 до n, после чего будет происходить одновременная работа с этими данными в двух модулях: 4 построения тепловой карты и 4.1 детекции нашивок (фиг. 1).
Для построения тепловой карты модулем 4, данные с модуля 3 проходят следующие этапы: каждый кадр из модуля раскадровки 3 переходит в модуль 4.2 перевода изображения из цветного в черно-белый формат, где и происходит обработка и окраска пикселей с коэффициентами от 0 до 1, где 0 - белый цвет, 1 - черный. После чего черно-белые изображения попадают в модуль 4.3 сличения кадров n-1 c n, где происходит “вычитание” - вычисление разницы между предыдущим кадром n-1 и предшествующим кадром n.
После этого данные с модуля 4.3 поступают в модуль 4.4 детекции объекта, где при помощи модели машинного обучения 7 происходит определение движущего объекта, как работника так и внутреннего служебного транспорта.
Для построения более точного теплового следа, данные из модуля 4.4 поступают в модуль 4.5 устранения “шума”, где при помощи коэффициентов происходит “стирание” несущественных изменений между кадрами, такими как “соринка” в кадре и так далее.
Отобранные данные из модуля 4.5 поступают в модуль 4.6 сложения кадров и окраски разницы, где применяется выбранный коэффициент палитры красных оттенков, соответствующий своему оттенку, и сложенная разница кадров окрашивается.
В модуле детекции нашивок 4.1 происходит следующее: на этапе детекции объекта в модуле 4.4 детекции объекта, происходит детекция нашивок при помощи модуля 4.1, который на ограничивающем прямоугольнике движущегося объекта детектирует нашивку. После чего данная метка переходит в модуль 4.7 классификации нашивки, где определяется ее принадлежность к определенной категории (если таких несколько для разных уровней персонала). После определения класса нашивки, информация отправляется в модуль 4.8 детекции конкретного объекта, где определяется конкретный сотрудник по собственной метке. Для точного определения модуль 4.8 берет из базы данных 8 хранения информации, расположенную на сервере 9 обработки данных, в которую были предварительно загружены данные о сотрудниках и их метках (фиг. 2).
Сформированная информация из модулей 4 и 4.1 объединяется и передается в модуль 5 объединения результатов, где информация накладывается друг на друга. После чего информация попадает в модуль 6 вывод результатов в интерфейс пользователя, где можно увидеть непосредственную тепловую карту, а также сотрудника (фиг. 3 и фиг. 4).
Следует отметить что данная система работает в режиме реального времени.
На фиг. 3 в целях сохранения конфиденциальности ФИО человека было сокрыто, однако, система определяет ФИО по метке.
Система локального позиционирования людей на территории закрытого и открытого типа обеспечивает построение оптимального маршрута рабочего/персонала за счет видеоаналитики данных в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного определения локального позиционирования движущихся объектов | 2021 |
|
RU2783676C1 |
| СПОСОБ И УСТРОЙСТВО ФИКСАЦИИ ТРЕВОЖНЫХ СОБЫТИЙ НА СЛУЖЕБНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2021 |
|
RU2770862C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЛИЦ И ПОСТРОЕНИЯ МАРШРУТА С ПОМОЩЬЮ СРЕДСТВА ДОПОЛНЕННОЙ РЕАЛЬНОСТИ | 2019 |
|
RU2712417C1 |
| ЛОКАЛЬНОЕ УСТРОЙСТВО ВИДЕОАНАЛИТИКИ | 2023 |
|
RU2818487C1 |
| СПОСОБ СОЗДАНИЯ КОМБИНИРОВАННЫХ КАСКАДОВ НЕЙРОННЫХ СЕТЕЙ С ЕДИНЫМИ СЛОЯМИ ИЗВЛЕЧЕНИЯ ПРИЗНАКОВ И С НЕСКОЛЬКИМИ ВЫХОДАМИ, КОТОРЫЕ ОБУЧАЮТСЯ НА РАЗНЫХ ДАТАСЕТАХ ОДНОВРЕМЕННО | 2021 |
|
RU2779408C1 |
| Программно-аппаратный комплекс выявления опасного приближения рабочей штанги к стенкам бассейна ядерного топлива на основе видеонаблюдения | 2023 |
|
RU2828724C1 |
| СПОСОБ ОТСЛЕЖИВАНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ИНТЕРЕСУЮЩИХ ОБЪЕКТОВ И АВТОНОМНОЕ УСТРОЙСТВО C ЗАЩИТОЙ ОТ КОПИРОВАНИЯ И ВЗЛОМА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2789609C1 |
| СПОСОБ И СИСТЕМА ВЫЯВЛЕНИЯ ТРЕВОЖНЫХ СОБЫТИЙ ПРИ ВЗАИМОДЕЙСТВИИ С УСТРОЙСТВОМ САМООБСЛУЖИВАНИЯ | 2019 |
|
RU2713876C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЭМОЦИОНАЛЬНОГО СОСТОЯНИЯ СОТРУДНИКОВ | 2021 |
|
RU2768545C1 |
| СПОСОБ АУДИОВИЗУАЛЬНОГО РАСПОЗНАВАНИЯ СРЕДСТВ ИНДИВИДУАЛЬНОЙ ЗАЩИТЫ НА ЛИЦЕ ЧЕЛОВЕКА | 2022 |
|
RU2791415C1 |


Изобретение относится к системам контроля и регулирования работы персонала, в частности, мониторингу качества работы подвижного персонала при выполнении процедур осмотра, охраны, обходов и диагностики объектов и/или участков территории производства. Система локального позиционирования людей на территории закрытого и открытого типа содержит как минимум одну видеокамеру, передающую видеопоток посредством предустановленного на процессоре сервера обработки видеопотока программного обеспечения на указанный сервер, который содержит модуль раскадровки, выполненный с возможностью получения видеопотока и одновременной передачи обработанных данных на сервер обработки данных в модуль построения тепловой карты и модуль детекции нашивок-идентификаторов, выполненных с возможностью одновременной обработки данных, при этом модуль построения тепловой карты содержит связанные между собой последовательно модули: модуль перевода изображения из цветного в черно-белый формат каждого кадра, модуль считывания кадров n-1 c n, выполненный с возможностью сравнения между предыдущими кадрами с предшествующими, модуль детекции объекта, связанный с модулем устранения «шума», который выполнен с возможностью устранения помех для построения теплового следа, и который связан с модулем сложения кадров и окраски разницы; при этом модуль детекции объекта выполнен с возможностью определения движущегося объекта при помощи модели машинного обучения YOLOv5, расположенной на сервере обработки данных; модуль детекции нашивок-идентификаторов содержит модуль классификации нашивки-идентификатора, который связан с модулем детекции конкретного объекта; причем модуль детекции конкретного объекта связан с модулем сложения кадров и окраски разницы через модуль устранения «шума»; причем модуль классификации нашивки связан с модулем детекции конкретного объекта, который связан с базой данных хранения информации, которая располагается на сервере обработки данных; модуль объединения результатов, связанный с модулями детекции нашивок-идентификаторов и тепловой карты, результаты с которого передаются по пути односторонней связи в модуль вывода результата в интерфейс пользователя. Технический результат: построение оптимального маршрута рабочего/персонала за счет видеоаналитики данных в режиме реального времени. 2 з.п. ф-лы, 4 ил.
1. Система локального позиционирования людей на территории закрытого и открытого типа, характеризующаяся тем, что содержит как минимум одну видеокамеру 1, передающую видеопоток 2 посредством предустановленного на процессоре сервера 10 обработки видеопотока программного обеспечения на указанный сервер 10, который содержит модуль раскадровки 3, выполненный с возможностью получения видеопотока 2 и одновременной передачи обработанных данных на сервер обработки данных 9 в модуль 4 построения тепловой карты и модуль 4.1 детекции нашивок-идентификаторов, выполненных с возможностью одновременной обработки данных, при этом модуль построения тепловой карты 4 содержит связанные между собой последовательно модули: модуль перевода изображения 4.2 из цветного в черно-белый формат каждого кадра, модуль 4.3 считывания кадров n-1 c n, выполненный с возможностью сравнения между предыдущими кадрами с предшествующими, модуль 4.4 детекции объекта, связанный с модулем 4.5 устранения «шума», который выполнен с возможностью устранения помех для построения теплового следа и который связан с модулем 4.6 сложения кадров и окраски разницы; при этом модуль 4.4 детекции объекта выполнен с возможностью определения движущегося объекта при помощи модели машинного обучения, расположенной на сервере обработки данных; модуль детекции 4.1 нашивок-идентификаторов содержит модуль 4.7 классификации нашивки-идентификатора, который связан с модулем 4.8 детекции конкретного объекта; причем модуль 4.8 детекции конкретного объекта связан с модулем 4.6 сложения кадров и окраски разницы через модуль устранение «шума»; причем модуль классификации нашивки связан с модулем детекции конкретного объекта, который связан с базой данных хранения информации, которая располагается на сервере обработки данных; модуль объединения результатов, связанный с модулями детекции нашивок-идентификаторов и тепловой карты, результаты с которого передаются по пути односторонней связи в модуль вывода результата в интерфейс пользователя.
2. Система локального позиционирования людей на территории закрытого и открытого типа по п. 1, отличающаяся тем, что нашивки-идентификаторы выполнены в виде тканевых или тканеподобных нашивок любой формы.
3. Система локального позиционирования людей на территории закрытого и открытого типа по п. 1, отличающаяся тем, что в качестве модели машинного обучения используют модель YOLOv5.
| Пневматический высевающий аппарат | 1961 |
|
SU145399A1 |
| US 2014172477 A1, 19.06.2014 | |||
| US 2018249131 A1, 30.08.2018 | |||
| US 2010013931 A1, 21.01.2010. | |||

