Изобретение относится к сканирующей технике и может быть использовано в горнодобывающей промышленности для поверхностной диагностики технического состояния подземных горных выработок, а также их последующей визуализации.
Известен механический каверномер с ручным приводом для взрывных скважин (патент RU 2656640 C1, 06.06.2018) состоящий из стержня, подвешенного на метрической металлической ленте для замера глубины скважины, на нижнем конце стержня закреплены проушины, в которых шарнирно установлены два мерных рычага, шарнирно соединенные тягами с подвижной втулкой, свободно насаженной на стержень, а на втулке закреплен конец метрической металлической ленты для замера диаметра скважины. Каверномер подвешен на ручной лебедке, на валу которой жестко закреплен барабан намотки метрической металлической ленты для замера глубины скважины, и свободно, со скольжением относительно вала, установлен барабан намотки метрической металлической ленты для замера диаметра скважины, а опоры лебедки снабжены выдвижными секциями.
Недостатком устройства является использование ручной лебедки, что приводит к невозможности использования устройства в автономном режиме.
Известен ультразвуковой каверномер (авторское свидетельство SU 111582 A1, 01.01.1957) состоящее из пьезокварцевого датчика, возбуждаемого импульсным генератором, который посылает ультразвуковые импульсы в окружающую прибору среду, а ультразвуковые колебания, пройдя через буровой раствор и отразившись от стенок скважины, принимаются датчиком, от которого колебания эхосигнала поступают на усилитель высокой частоты, где они усиливаются, затем поступают в детектор, где видоизменяются и поступают в выходной каскад, который, в свою очередь, передает сигнал по кабелю на вход усилителя импульсов, расположенный на поверхности. Усиленный импульс пускает в ход генератор ждущей развертки и осуществляет подсветку луча электронно-лучевой трубки.
Недостатком устройства является использование кабеля для позиционирования и перемещения устройства внутри скважины, из-за чего устройство находится в вертикальном положение, что приводит к невозможности использования в горизонтальных криволинейных горных выработках.
Известно устройство для измерения деформаций на стенках горной выработки методом частичной разгрузки на большой базе (патент RU 2314417 C1, 10.01.2008). Устройство содержит маркшейдерскую рулетку с передвижным нониусом, блок натяжения рулетки, съемные реперы с крючьями для зацепления рулетки, при этом реперы выполнены в виде двух разъемных металлических клиньев, на направляющей стороне первого металлического клина репера установлен конусный стопор, состоящий из конуса, пружины и резьбовой пробки, а в другом металлическом клине на всю длину выполнено отверстие с резьбой для крючка зацепления рулетки, со стороны крючка у основания приварены две металлические пластины, а на наружное резьбовое основание надета резиновая трубка. Устройство предназначено для измерения деформаций стенок горных выработок с последующим вычислением по ним действующих в массиве пород главных напряжений.
Недостатком устройства является использование съемных реперов и маркшейдерской рулетки, использование которых возможно только в ручном режиме, что что приводит к невозможности использования устройства в автономном режиме.
Известен трехмерный сканер с обратной связью по сбору данных (патент RU 2767590 C1, 17.03.2022), содержащий корпус, один или более источников света внутри корпуса, один или более оптических датчиков внутри корпуса, а также содержащий систему охлаждения внутри корпуса, содержащую единственный элемент из металла, выполненный с возможностью обеспечения тепловой связи между источниками света, оптическими датчиками и множеством процессоров, чтобы поддерживать пространственно согласованную температуру между источниками света, оптическими датчиками и множеством процессоров.
Недостатком устройства является использование конструктивных элементов, предназначенных для ручного использования, что приводит к невозможности автоматизации и автономизации процесса сканирования.
Известен способ автоматизации метода визуального и измерительного контроля поверхности труб и устройство для его осуществления (патент RU 2571159 C1, 20.12.2015), снабженное средствами перемещения и содержащее жесткий несущий корпус, оптический лазерный блок, взаимосвязанные системы лазерного сканирования поверхности труб, регистрации измерений, передачи данных на ПЭВМ, расшифровки расположения дефектов на поверхности труб, их геометрических параметров и геометрических параметров трубы, прочностного расчета для оценки влияния выявленных дефектов на работоспособность трубы, определения безопасного рабочего давления и принятия решения о необходимом виде ремонта поверхности труб, при этом на корпусе установлен по меньшей мере один оптический лазерный блок, использующий триангуляционный принцип сканирования, который содержит два объектива и две матрицы, при этом сканирование поверхности труб производится путем перемещения лазерного блока относительно обследуемой трубы либо обследуемой трубы относительно лазерного блока.
Недостатком устройства является использование конструктивных элементов, применяемых для диагностики внешней поверхности трубы, что приводит к невозможности диагностики внутренний поверхности горных выработок.
Известно устройство для автоматического мониторинга состояния асбестоцементных сбросных трубопроводов закрытой оросительной системы (патент RU 2762362 C1, 20.12.2021), принятое за прототип, содержащее перемещаемое относительно обследуемого трубопровода с помощью приводных колес устройство со средствами сканирования, получения изображений поверхности трубопровода, регистратор и передачи данных на компьютер для формирования трехмерной модели трубопровода с помощью блока программного обеспечения, причем для получения изображений внутренней поверхности трубопровода и регистрации использованы соответственно: сканер в виде георадарной антенны на телескопической штанге, цифровой фотоаппарат или видеокамера с подсветкой и регистратор в виде маркера, сообщенного через магистраль с емкостью для красящего вещества, при этом для обеспечения возможности их циклического вращения по внутренней поверхности трубопровода и перемещения вдоль него использован шаговый электродвигатель с полым вращающимся валом и блоком управления.
Недостатком устройства является установка сканера в виде георадарной антенны, что приводит к низкой помехоустойчивости, точности измерения.
Техническим результатом является повышение производительности при диагностики технического состояния подземных горных выработок.
Технический результат достигается тем, что в качестве блока сканирование окружающего пространства установлен лазерный датчик, который закреплен в двухосном карданном подвесе, совершающем двухосные сферические движения при помощи электродвигателей, на измерительной стойке, которая установлена в центре подвижной платформы, электромоторы закреплены в нижней части подвижной платформы и соединены с колесами через валы вращения, в задней части платформы закреплены блок хранения результатов сканирования, датчик газового контроля, акселерометр, гироскоп, входы которых соединены с выходами аккумулятора, между измерительной стойкой и датчиком газового контроля жестко закреплен микропроцессор, входы которого соединены через электрический кабель с выходами лазерного датчика, аккумулятора, датчика газового контроля, акселерометра и гироскопа. Также выходы микропроцессора соединены через электрический кабель с входами электродвигателей и блока хранения результатов сканирования.
Устройство поясняется следующими фигурами:
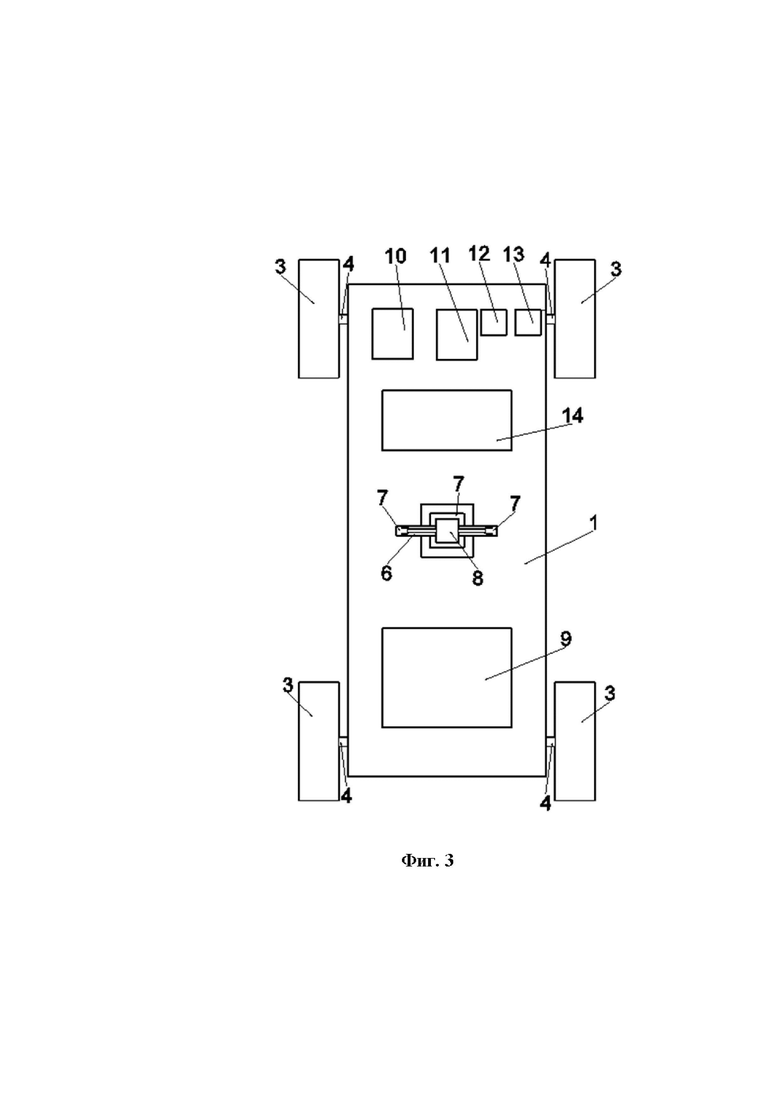
фиг. 1 - общий вид устройства;
фиг. 2 - вид устройства спереди;
фиг. 3 - вид устройства сверху;
1 - подвижная платформа;
2 - электромотор;
3 - колеса;
4 - вал вращения;
5 - измерительная стойка;
6 - двухосный карданов подвес;
7 - электродвигатель;
8 - лазерный датчик;
9 - аккумулятор;
10 - блок хранения результатов сканирования;
11 - датчик газового контроля;
12 - акселерометр;
13 - гироскоп;
14 - микропроцессор.
Устройство состоит из подвижной платформы 1 (фиг.1-3) выполненной в форме прямоугольника. Электромоторы 2 закреплены в нижней части подвижной платформы 1 и соединены с колесами 3 при помощи валов вращения 4. Измерительная стойка 5 установлена в центре платформы 1, сверху на ней закреплен двухосный карданов подвес 6 с электродвигателями 7, а в нем установлен лазерный датчик 8, который используют в качестве блока сканирование окружающего пространства. Сверху в передней части подвижной платформы 1 жестко закреплен аккумулятор 9, выход которого соединен через электрический кабель с лазерным датчиком 8. В задней части подвижной платформы закреплен с возможностью съема блок хранения результатов сканирования 10, вход которого соединен через электрический кабель с выходом аккумулятора 9, а также жестко закреплены датчик газового контроля 11, акселерометр 12, гироскоп 13, входы которых соединены через электрический кабель с выходами аккумулятора 9. Между измерительной стойкой 5 и датчиком газового контроля 11 жестко закреплен микропроцессор 14, входы которого соединены через электрический кабель с выходами лазерного датчика 8, аккумулятора 9, датчика газового контроля 11, акселерометра 12 и гироскопа 13. Выходы микропроцессора 14 соединены через электрический кабель с входами электродвигателей 7 и блока хранения результатов сканирования 10.
Устройство работает следующим образом. Устройство устанавливают в начало подземной горной выработки. Движение к первоначальному участку сканирования осуществляется при помощи подвижной платформы 1, которая передвигается на колесах 3, соединенных с электромоторами 2 через валы вращения 4. Лазерный датчик 8, закрепленный в двухосном карданном подвесе 6, расположенным на измерительной стойке 5, необходимой для уменьшения погрешности измерения, проводит сканирование окружающего пространства, совершая двухосные сферические движения при помощи электродвигателей 7. После окончания процесса сканирования устройство перемещается по горной выработке к следующему участку сканирования, где процесс сканирования повторяется. Величины расстояний до стенок горной выработки, получаемые лазерным датчиком 8 во время сканирования передаются в микропроцессор 14. Также в микропроцессор 14 с акселерометра 12 передаются величины проекций ускорений устройства на 3 оси, а с гироскопа 13 передаются данные изменения углов наклона устройства. Обработанные данные передаются с микропроцессора 14 в блок хранения результатов сканирования 10. Также в блок хранения результатов сканирования 10 поступают данные о содержании в воздухе огнеопасных газовоздушных смесей, получаемые с датчика газового контроля 11. По окончании сканирования блок хранения результатов сканирования 10 снимается с устройства для дальнейшей обработки данных, полученных во время сканирования.
Устройство для автоматизированной поверхностной диагностики технического состояния подземных горных выработок позволяет проводить диагностику состояния подземных горных выработок без присутствия человека, а также получать трехмерную модель подземных горных выработок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ПОВЕРХНОСТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2023 |
|
RU2810350C1 |
| Полевой мехатронный профилограф | 2021 |
|
RU2770800C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ | 2023 |
|
RU2818406C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| АВТОМАТИЗИРОВАННЫЙ ПОДВИЖНЫЙ СТАНОК | 2020 |
|
RU2752349C1 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| СПОСОБ РАЗРАБОТКИ РУДНЫХ МЕСТОРОЖДЕНИЙ С САМООБРУШЕНИЕМ И ВЫПУСКОМ ОБРУШЕННОЙ РУДЫ | 2010 |
|
RU2439324C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС ДЛЯ КВАЗИСТАТИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2408843C1 |


Изобретение относится к сканирующей технике и может быть использовано в горнодобывающей промышленности для автоматизированной поверхностной диагностики технического состояния подземных горных выработок, а также их последующей визуализации. Устройство содержит подвижную платформу на колесах и блок сканирования окружающего пространства, расположенный на измерительной стойке. В качестве блока сканирования окружающего пространства установлен лазерный датчик, который закреплен в двухосном карданном подвесе, совершающем двухосные сферические движения при помощи электродвигателей, на измерительной стойке, которая установлена в центре подвижной платформы. Электромоторы закреплены в нижней части подвижной платформы и соединены с колесами через валы вращения. В задней части платформы закреплены блок хранения результатов сканирования, датчик газового контроля, акселерометр, гироскоп, входы которых соединены с выходами аккумулятора. Между измерительной стойкой и датчиком газового контроля жестко закреплен микропроцессор, входы которого соединены через электрический кабель с выходами лазерного датчика, аккумулятора, датчика газового контроля, акселерометра и гироскопа. Выходы микропроцессора соединены через электрический кабель с входами электродвигателей и блока хранения результатов сканирования. Техническим результатом является повышение производительности при диагностике технического состояния подземных горных выработок. 3 ил.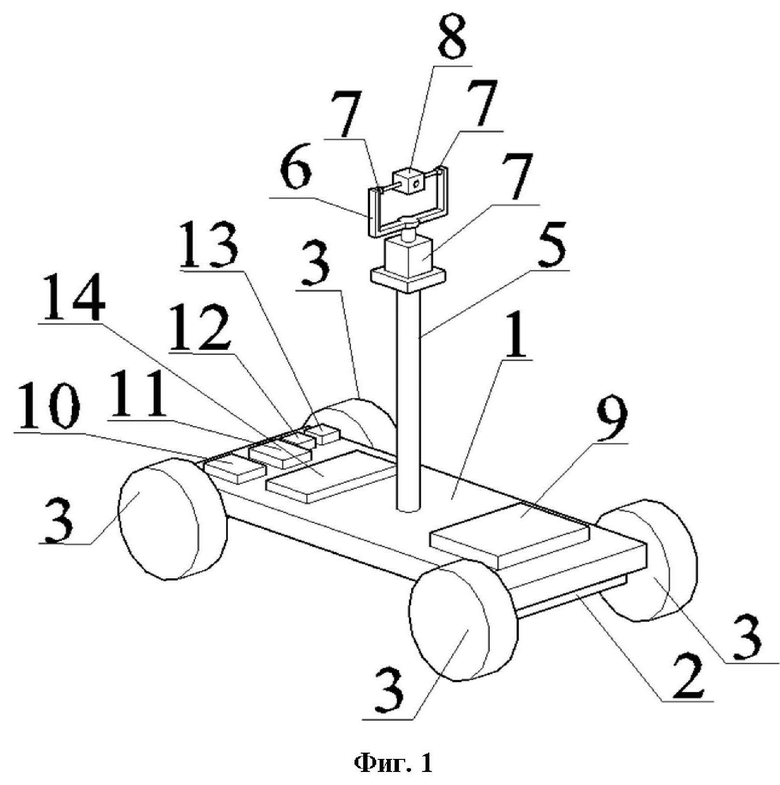
Устройство для автоматизированной поверхностной диагностики технического состояния подземных горных выработок, содержащее подвижную платформу на колесах, блок сканирования окружающего пространства, расположенный на измерительной стойке, отличающееся тем, что в качестве блока сканирования окружающего пространства установлен лазерный датчик, который закреплен в двухосном карданном подвесе, совершающем двухосные сферические движения при помощи электродвигателей, на измерительной стойке, которая установлена в центре подвижной платформы, электромоторы закреплены в нижней части подвижной платформы и соединены с колесами через валы вращения, в задней части платформы закреплены блок хранения результатов сканирования, датчик газового контроля, акселерометр, гироскоп, входы которых соединены с выходами аккумулятора, между измерительной стойкой и датчиком газового контроля жестко закреплен микропроцессор, входы которого соединены через электрический кабель с выходами лазерного датчика, аккумулятора, датчика газового контроля, акселерометра и гироскопа, выходы микропроцессора соединены через электрический кабель с входами электродвигателей и блока хранения результатов сканирования.
| Устройство для автоматического мониторинга состояния асбестоцементных сбросных трубопроводов закрытой оросительной системы | 2021 |
|
RU2762362C1 |
| RU 2018115412 A, 24.10.2019 | |||
| Способ обследования закрытых подземных выработок с применением беспилотных летательных аппаратов | 2018 |
|
RU2708799C1 |
| Автоматическая система деформационного контроля массива горных пород | 2020 |
|
RU2744340C1 |
| ТРЕХМЕРНЫЙ СКАНЕР С ОБРАТНОЙ СВЯЗЬЮ ПО СБОРУ ДАННЫХ | 2019 |
|
RU2767590C2 |
| US 10082433 B2, 25.09.2018. | |||

