Предлагаемое изобретение относится к области радиотехники и связи, а именно к способам и воздушным платформам, используемым для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области.
В настоящее время беспроводные широкополосные сети практически находятся вне конкуренции по оперативности развертывания, мобильности, цене и широте возможных приложений, во многих случаях представляя собой единственное экономически оправданное решение.
Для географических областей, в которых большая территория сочетается с невысокой плотностью населения, широкополосные беспроводные решения имеют особое значение, так как позволяют экономично и оперативно создавать телекоммуникационную инфраструктуру на обширных территориях. Особенно важно это для информатизации удаленных и сельских регионов и решения одной из важнейших проблем информационной безопасности - проблемы "информационного неравенства" регионов.
В последние годы ведутся интенсивные разработки широкополосных беспроводных региональных сетей с использованием воздушных платформ. Использование воздушных платформ обеспечивает телекоммуникационное покрытие больших географических регионов. Одновременно с созданием региональных сетей передачи данных, голоса и видеоинформации высотные платформы могут применяться для целей видеонаблюдения в радиусе 70-80 км (например, в приграничных территориях или наблюдения транспортных потоков), обнаружения лесных пожаров, экологического мониторинга с использованием сенсорных сетей, геологической и геофизических разведок, радиологического контроля и т.д.
В качестве таких высотных платформ рассматриваются гелиевые дирижабли, располагаемые на высоте 20-22 км, платформы типа летающего крыла, самолеты и вертолеты. При длительном использовании таких высотных платформ они оказываются весьма дорогостоящими как при разработке, построении и запуске, так и в процессе эксплуатации.
Известна мобильная система связи, включающая мобильные телефоны, связанные радиосвязью с базовыми станциями, по меньшей мере, часть из которых выполнена подвижными, связанными радиосвязью со стационарной шлюзовой станцией сопряжения, соединенной через линию передачи сигналов с телефонной станцией, причем, по меньшей мере, одна из подвижных базовых станций размещена на надземном передвижном объекте, выполненном в виде аэростата (патент РФ на полезную модель №28419, Н 04 В 7/26, 2002).
Известна всенаправленная высотная антенна, представляющая собой однопроводную линию передачи, один конец которой нагружен на согласованную нагрузку и крепится на аэростате, а другой конец связан с приемопередатчиком и с помощью анкера крепится к земле, которая позволяет повысить дальность связи (патент РФ №2099827, Н 01 Q 1/28, 1994).
Известна аэростатная антенна в виде металлического контейнера с прикрепленными к его корпусу радиальными проводниками, выполненными в форме петли. В указанной антенне стабилизация положения происходит при использовании не менее чем четырех специальных фалов (патент РФ №2097880, Н 01 Q 1/28, 1995).
Известен антенный провод для антенны, поддерживаемой в вертикальном положении летательным аппаратом, содержащий грузонесущий трос из синтетических нитей и токопроводяшую оплетку из алюминиевых проводников, уложенных по поверхности троса под углом (патент РФ №2030039, Н 01 Q 1/00, 1991). Указанный провод не обладает достаточной надежностью при длительном использовании в беспроводных сетях передачи информации.
Для всех указанных выше аналогов помимо индивидуальных недостатков присущи определенные общие недостатки, связанные с использованием носителя-аэростата. Кроме недостаточных функциональных возможностей, к ним относятся:
1. Необходимость использования громоздких и относительно дорогих причальных устройств, используемых для опускания и удержания аэростата на земле во время штормовых и грозовых предупреждений.
2. Необходимость дважды в месяц осуществлять спуск-подъем аэростата с целью подкачки гелия в оболочку аэростата.
3. Зависимость от центров заправки гелием, т.к. гелий теряется даже при хранении в стальных баллонах.
4. Необходимость подготовки большой посадочной площади (50×50 м) для подъема-опускания аэростата и необходимость наличия значительного количества эксплуатационного персонала (6-8 чел.).
5. Малый предельный срок службы оболочки аэростата - порядка 2-х лет.
6. Флюгирование аэростата на привязном кабеле-тросе приводит к необходимости использования вертлюга, предназначенного для предохранения кабеля от закручивания и обеспечения электрического и оптического соединений при повороте на произвольный угол, ухудшающего и ограничивающего параметры и качество оптического канала в кабель-тросе.
Наиболее близкими техническими решениями с точки зрения обеспечения индивидуальной маневренности приемо-передающих элементов сети является совокупность воздушных платформ связи и способ их использования для формирования беспроводных сетей передачи информации. Совокупность дрейфующих платформ включает в себя множество индивидуальных платформ легче воздуха, разнесенных над непрерывной географической областью в пределах предварительно определенного диапазона высот, так что обеспечивается повсеместное покрытие по линии прямой видимости данной географической области. Каждая из множества платформ содержит оболочку для заполнения регулируемым объемом газа низкой плотности для обеспечивания плавучести платформы и устройство передачи сигналов, прикрепленное к оболочке (патент РФ 2257016, Н 04 Q 7/20, 2000).
Недостатками указанных технических решений являются ограниченный диапазон функциональных возможностей способа формирования сети и устройства воздушных платформ в связи с невозможностью автоматизации процесса ориентации и стабилизации положения платформ, сложность конструкции и обслуживания в процессе их эксплуатации, недостаточная надежность в связи с использованием газа низкой плотности, отсутствие непрерывности и длительности использования отдельной платформы в регинальной сети.
Техническим результатом предлагаемых изобретений является расширение функциональных возможностей способа формирования сети и устройства воздушных платформ за счет обеспечения возможности автоматизации ориентации и стабилизации положения платформ, упрощения конструкции и обслуживания в процессе их эксплуатации с одновременным повышением надежности, непрерывности и длительности использования региональных сетей с предлагаемой платформой.
Указанный технический результат достигается в способе формирования региональных беспроводных сетей передачи информации, включающем размещение воздушных телекоммутационных платформ на заданных высотах путем создания подъемной силы для их удержания в заданных точках регинальной сети географического региона и стабилизацию положения платформ в этих точках тем, что подъемную силу для каждой платформы создают с помощью дистанционно и/или автономно пилотируемого летательного аппарата за счет вертикальной составляющей его вектора тяги, а удержание этого летательного аппарата и платформы в заданной точке региональной сети географического региона осуществляют, связывая их с заданной точкой поверхности географического региона гибкой тягой, которую используют в качестве канала подачи энергии питания для обеспечения создания вектора тяги летательного аппарата.
Кроме того, стабилизацию положения платформы могут обеспечивать за счет инерциальной навигации летательного аппарата в заданной точке региональной сети географического региона.
Указанный технический результат для телекоммутационной воздушной платформы, содержащей узел формирования подъемной силы и связанную с ним станцию приема и передачи сигналов в заданном географическом регионе, достигнут тем, что узел формирования подъемной силы выполнен в виде фюзеляжа с приборным отсеком, связанного с винтовым движителем в виде, по меньшей мере, одной гондолы, в которой установлены электрический двигатель с редуктором и тяговым винтом, при этом фюзеляж связан посредством двухосного карданового подвеса с кабель-тросом, второй конец которого зафиксирован с возможностью изменения длины кабель-троса в заданной точке поверхности географического региона и связан с источником электрической энергии в этой точке.
Кроме того, приборный отсек может содержать автономную систему управления, состоящую из микропроцессора с подключенными к его входам бесплатформенным инерциальным блоком, альтиметром, магнитометром, GPS-приемником, а к его выходам - элементами управления электрическими двигателями винтового движителя и изменения направления и величины вектора его тяги.
Кроме того, бесплатформенный инерциальный блок может содержать ориентированные своими осями чувствительности в направлении трех взаимно ортогональных координатных осей микромеханические гироскопы и акселерометры.
Кроме того, станция приема и передачи сигналов в заданном географическом регионе может быть выполнена в виде базовой станции системы беспроводного широкополосного доступа и размещена в приборном отсеке, который содержит также аккумуляторную батарею, преобразователи напряжения, вторичные источники питания.
Кроме того, приборный отсек может содержать видеокамеру наблюдения.
Кроме того, кабель-трос может быть выполнен коаксиальным с последовательно расположенными от центра к периферии несущей тягой, кивларовым несущим слоем, информационным волоконно-оптическим слоем, изоляционным слоем и слоем внешней климатической и механической защиты, при этом в изоляционном слое по всей длине кабель-троса размещены, по меньшей мере, два электроизолированных токопроводящих проводника для подачи электрической энергии с поверхности географического региона к электродвигателям узла формирования подъемной силы.
Кроме того, по меньшей мере, две гондолы с установлеными в них электрическими двигателями с редукторами и тяговыми винтами могут быть размещены по разные стороны от средней части фюзеляжа и связаны с ним посредством соответствующих радиальных штанг.
Кроме того, к периферийным концам штанг может быть прикреплен, по меньшей мере, один дефлектор для защиты лопастей винта.
Кроме того, периферийные концы штанг могут быть снабжены проблесковыми маячками.
Изобретение поясняются чертежами.
На фиг.1 показана общая схема, иллюстрирующая предлагаемое изобретение;
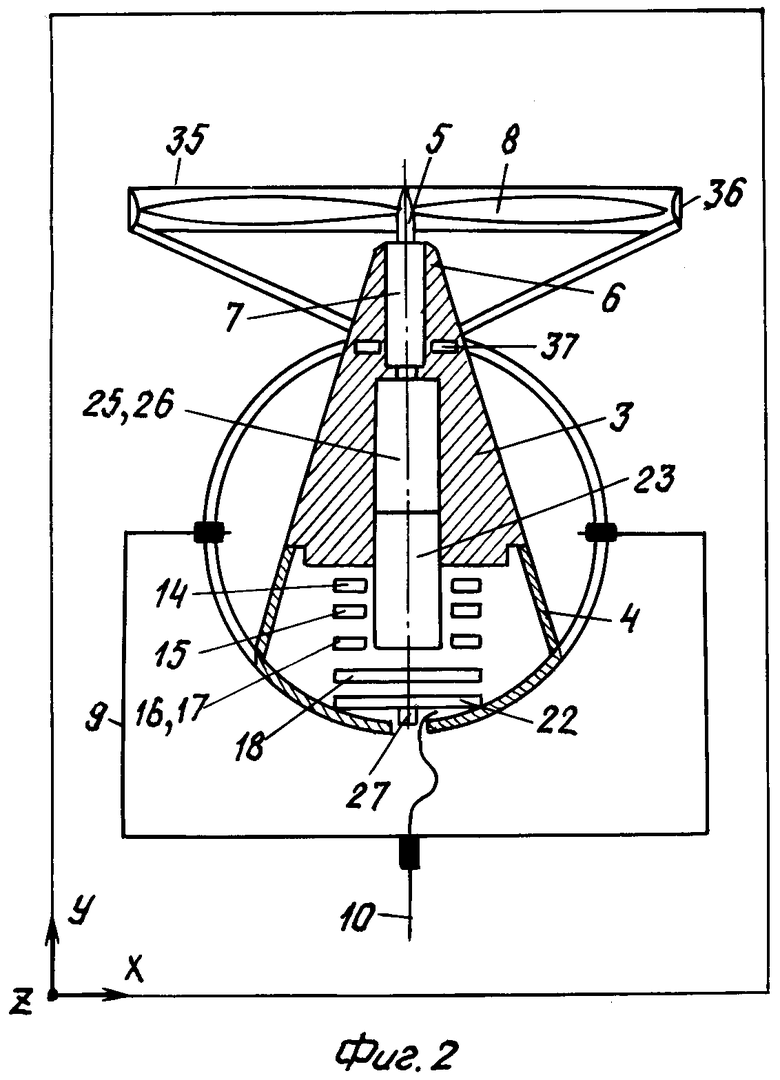
на фиг.2 представлена конструктивная схема выполнения платформы с одновинтовым движителем;
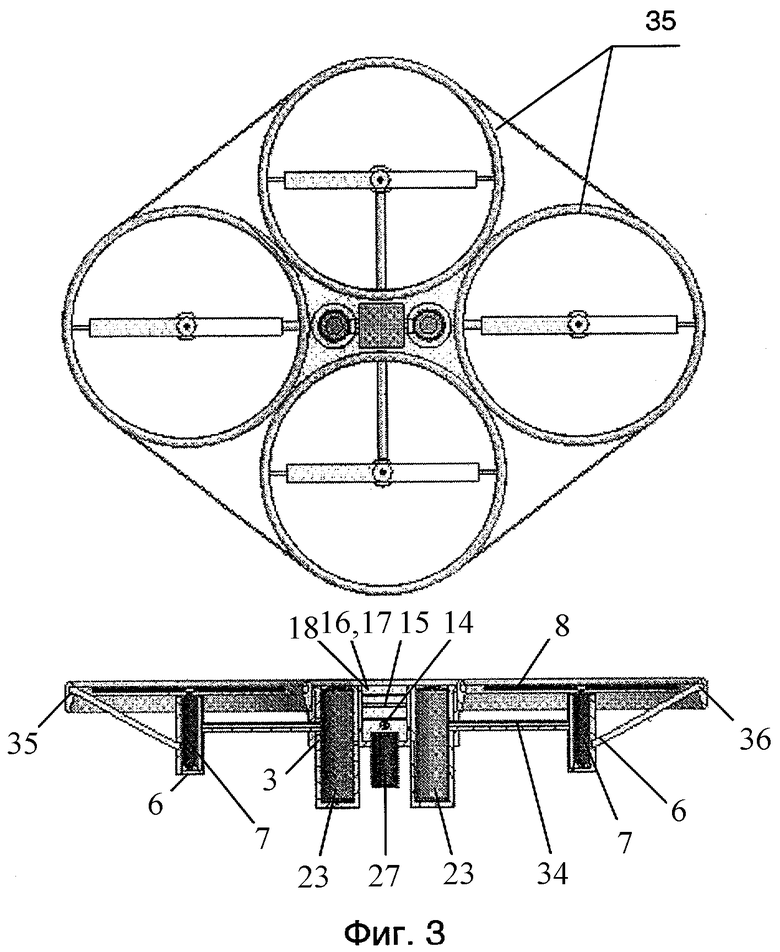
на фиг.3 представлена конструктивная схема выполнения винтового движителя платформы с четырьмя винтами;
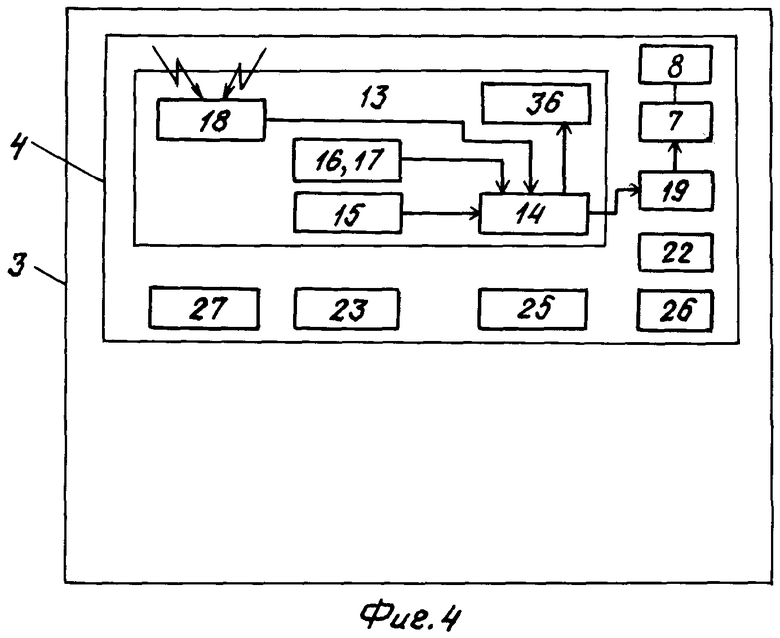
на фиг.4 представлена блок-схема автономной системы управления летательным аппаратом платформы;
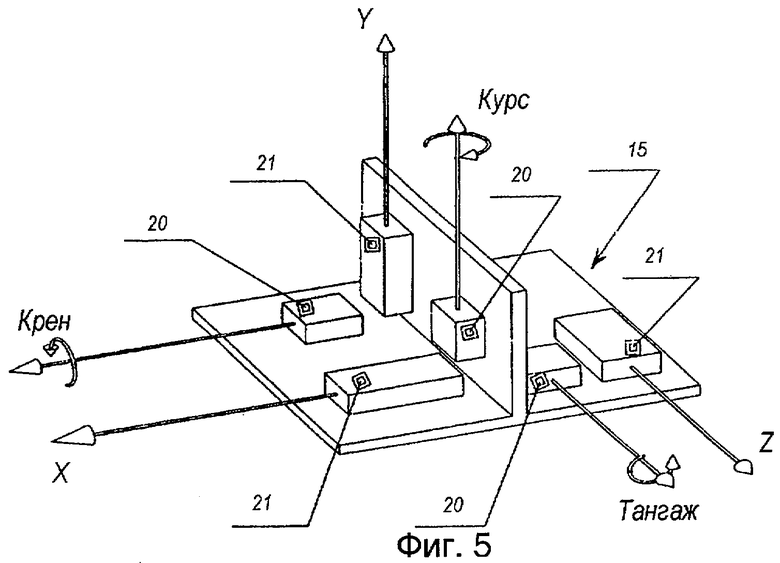
на фиг.5 показана блок-схема бесплатформенного инерциального блока;
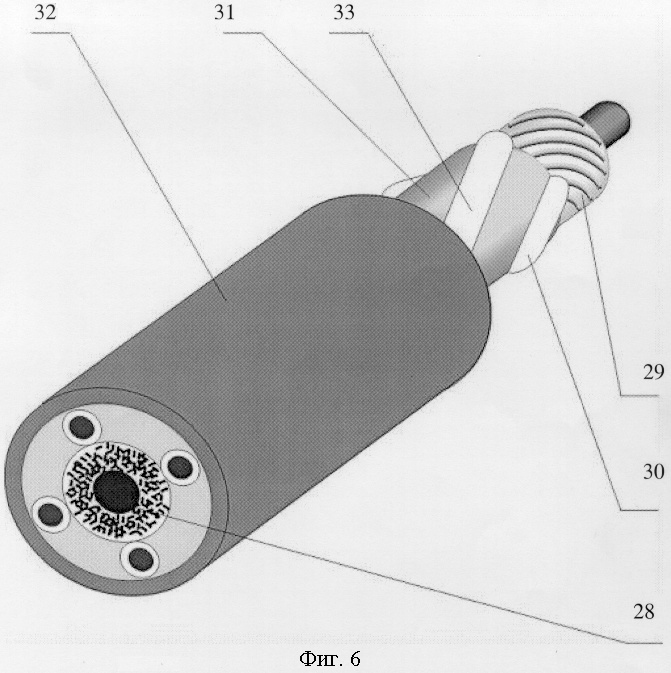
на фиг.6 представлена конструктивная схема выполнения кабель-троса.
Телекоммутационная воздушная платформа 1 (фиг.1) содержит узел формирования подъемной силы (летательный аппарат) 2, связанную с этим узлом станцию 38 приема и передачи сигналов в заданном географическом регионе. Узел формирования подъемной силы 2 выполнен в виде фюзеляжа 3 (фиг.2) с приборным отсеком 4 и связан с винтовым движителем 5 в виде, по меньшей мере, одной гондолы 6, в которой установлены электрический двигатель 7 с редуктором и тяговым винтом 8. Фюзеляж связан посредством двухосного карданового подвеса 9 с кабель-тросом 10, второй конец которого зафиксирован с возможностью изменения длины кабель-троса, например, на кабельной катушке 11 в заданной точке поверхности географического региона и связан с источником электрической энергии 12 в этой точке.
В приборном отсеке размещена автономная система управления 13, состоящая из микропроцессора 14 и поключенных к его входам бесплатформенного инерциального блока 15, альтиметра 16, магнитометра 17, GPS-приемника 18, а также подключенных к выходам микропроцессора элементам 19 управления электрическими двигателями винтового движителя и изменения направления и величины вектора его тяги. Указанные элементы 19 могут быть разного исполнения, например в виде рулевых машинок 37 поворота осей вращения электродвигателей и винтов, при установке их в гондоле или фюзеляже на кардановом подвесе, или преобразователей частоты вращения электродвигателей и винтов, управляемых микропроцессором.
Бесплатформенный инерциальный блок 15 содержит ориентированные своими осями чувствительности в направлении трех взаимно ортогональных координатных осей микромеханические гироскопы 20 и акселерометры 21.
Станция 38 приема и передачи сигналов в заданном географическом регионе выполнена в виде базовой станции системы беспроводного широкополосного доступа 22 и размещена в приборном отсеке, который содержит также аккумуляторную батарею 23, преобразователи напряжения 25, вторичные источники питания 26. Приборный отсек содержит также видеокамеру наблюдения 27.
Кабель-трос 10 выполнен коаксиальным с последовательно расположенными от центра к периферии несущей тягой 28, кивларовым несущим слоем 29, информационным волоконно-оптическим слоем 30, изоляционным слоем 31 и слоем внешней климатической и механической защиты 32. В изоляционном слое по всей длине кабель-троса размещены, по меньшей мере, два электроизолированных токопроводящих проводника 33 для подачи электрической энергии с поверхности географического региона к электродвигателям узла формирования подъемной силы.
В случае выполнения винтового движителя 5 с более чем одним тяговым винтом 8 гондолы 6 с установленными в них электрическими двигателями 7 с редукторами и тяговыми винтами 8 размещаются по разные стороны от средней части фюзеляжа 3 и связываются с ним посредством соответствующих радиальных штанг 34. К периферийным концам штанг 34 прикреплен, по меньшей мере, один дефлектор 35 для защиты лопастей винта 8 и проблесковые маячки 36.
Работа телекоммутационной воздушной платформы осуществляется следующим образом.
Подъемная сила создается тяговым винтом 8, приводимым в движение электродвигателем 7, питанием для которого служит электроэнергия, поступающая по проводникам кабель-троса с поверхности географического региона, или аккумуляторная батарея. Для создания горизонтальной составляющей тяги винта 8 электродвигатель 7, установленный в кардановый подвес, наклоняется в нужном направлении при помощи двух рулевых машинок 37.
Управление платформой 1 (режим подъема) может осуществляться как со специального пульта, так и с помощью портативного персонального компьютера. Полетное задание включает координаты: высоту и курсовой угол платформы 1, задается на земле оператором с помощью клавиатуры портативного персонального компьютера или пульта. После этого управление платформой 1 возложено на автономную систему управления, состоящую из бесплатформенного инерциального блока 15, альтиметра 16, магнитометра 17, GPS-приемника 18 и микропроцессора 14.
Взлет платформы 1 осуществляется автоматически, со специального стапеля или с поверхности земли. Совершив набор высоты, платформа 1 стабилизируется относительно горизонта и курса с заданной точностью и удерживается в этом положении в процессе ее работы. Стабилизация телекоммутационной воздушной платформы 1 во время работы осуществляется автоматически.
В автономной системе управления предусмотрены три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловой скорости использованы микромеханические вибрационные гироскопы 20, линейного ускорения - микромеханические акселерометры 21. В качестве датчика высоты использован микромеханический барометрический высотомер (альтиметр). Для повышения точности стабилизации по каналу курса используется трехкомпонентный магнитометр.
Законы управления формируются с помощью микропроцессора и позволяют осуществлять стабилизацию курса, крена и тангажа (стабилизация углов относительно центра масс) и координированных разворотов по курсу.
Компенсация сноса платформы 1 из-за ветра (стабилизация центра масс) осуществляется с помощью приемника глобальной навигационной системы (GPS-приемника) и акселерометров 21.
Автоматизированная система управления производит контроль текущих параметров платформы 1, напряжения питания, температуры, давления и т.д. Кроме этого, в состав системы управления входит блок диагностики, позволяющий обеспечить работоспособность платформы 1 при выходе из строя двух любых тяговых двигателей 5.
В случае обрыва кабель-троса 10 предусмотрен автоматический режим аварийной посадки платформы 1 с использованием энергии бортового аккумулятора.
Одним из основных достоинств предлагаемого технического решения является возможность использования хорошо разработанной технологии передачи электрической энергии и информационных потоков с помощью кивларового кабель-троса 10. Наличие в кабеле 10 медных проводов обеспечивает надежное электропитание электродвигателей платформы 1 и их работу в течение длительного времени без опускания платформы 1 на землю (не менее одного года); оптическое волокно в кабель-тросе 10 позволяет передавать с высокой скоростью (100 Мбит/с) большие объемы информации с борта на землю и с земли на борт.
Кроме этого, указанные платформы 1 могут обеспечить функции видеонаблюдения и ряд других функций, которые были описаны ранее.
В качестве предварительных требований, которым должна удовлетворять телекоммутационная воздушная платформа 1, являются следующие:
- масса радиооборудования, размещаемого на платформе 1, не менее 8 кг;
- высота зависания платформы 1 до 200 метров;
- масса кабель-троса 12 кг;
- потребляемая мощность радиооборудования 600 Вт;
- напряжение питания радиооборудования 5 В и 12 В постоянного тока;
- время непрерывной работы оборудования без обслуживания не менее года;
- работоспособность аппарата во всех климатических зонах региона;
- диапазон рабочих температур радиооборудования (-35)-(+55)°С;
- скорость ветра до 20 м/с.
Для удовлетворения перечисленных выше требований необходимо выбрать рациональную схему построения телекоммутационной платформы 1, обладающую наилучшими массогабаритными показателями.
Наличие высокоскоростных и моментных электрических двигателей, отличающихся характером движения ротора, видом источника энергии, а также последовательностью расположения их в кинематической схеме обуславливает многообразие вариантов конструктивно-компоновочных схем, которые могут обеспечить заданные технологические требования.
Проведенные предварительные исследования типов летательных аппаратов показывают, что наиболее выгодной в настоящее время является векторная конструкция с количеством винтов более 3.
Были рассмотрены одновинтовая, двухвинтовая соосная, двухвинтовая продольная, трехвинтовая, четырехвинтовая и шестивинтовая схемы построения летательных аппаратов, чтобы выявить преимущества и недостатки каждой конструкции с учетом требований, предъявляемых к платформе.
Шестивинтовая схема позволяет обеспечить работоспособность телекоммутационной винтокрылой платформы при двух любых несущих двигателях. Поэтому исходя из соображений надежности для дальнейшей разработки следует выбрать схему построения телекоммутационной воздушной платформы 1 с шестью винтами.
Автоматическая телекоммутационная шестивинтовая платформа 1 значительно повышает характеристики управляемости, маневренности и грузоподъемности. Она состоит из фюзеляжа 3, который включает в себя корпус приборного отсека 4, соединенного с шестью гондолами 6 двигателей. В гондолах 6 установлены электрические двигатели 7 с редукторами и винтами 8. На периферии гондол 6 размещены также проблесковые маячки 36. В корпусе приборного отсека 4 установлены аккумуляторная батарея 23, преобразователи напряжения 25 и вторичные источники питания 26, базовая станция системы беспроводного широкополосного доступа 22, видеокамера наблюдения 27 и система автоматического управления телекоммутационной воздушной платформой 1. Платформа 1 соединяется с кабель-тросом 10 посредством двухосного карданового подвеса.
При потребной тяге группы винтов 500 Н суммарная масса двигателей составляет соответственно Mq=10 кг, а энергопотребление 5 кВт.
В конструкции устройства использованы разработанные авиационной промышленностью электродвигатели постоянного тока на основе магнитов SmCo, имеющие характеристики, удовлетворяющие заданным требованиям эксплуатации телекоммутационной воздушной платформы 1.
На этапе полунатурного моделирования осуществлялась проверка принципов построения платформы 1 на специально изготовленном макете аппарата с четырьмя несущими винтами, включающего реальные чувствительные элементы и исполнительные органы и информационно-вычислительный комплекс. Кроме того, использовался специализированный механический стенд, обеспечивающий условия углового и линейного движения телекоммутационной воздушной платформы 1, максимально приближенные к реальным.
Таким образом обеспечен технический результат предлагаемого изобретения, заключающийся в расширении функциональных возможностей способа формирования сети и устройства воздушных платформ 1 за счет обеспечения возможности автоматизации ориентации и стабилизации положения платформ 1, упрощения конструкции и обслуживания в процессе их эксплуатации с одновременным повышением надежности, непрерывности и длительности использования региональных сетей с предлагаемой платформой 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ВЫСОТНАЯ ВИНТОКРЫЛАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2319319C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ НАВИГАЦИИ ПРИВЯЗНЫХ ВОЗДУШНЫХ ПЛАТФОРМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ПРИВЯЗНАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2006 |
|
RU2315954C1 |
| СПОСОБ ПОДЪЕМА НА ЗАДАННУЮ ВЫСОТУ И ОБЕСПЕЧЕНИЯ НАВИГАЦИИ ВИНТОКРЫЛОЙ ПЛАТФОРМЫ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315955C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| Способ непрерывной высотной телекоммутационной связи | 2019 |
|
RU2715420C1 |
| Привязная мониторинговая платформа с системой питания | 2019 |
|
RU2724509C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2651305C1 |
| СОЛНЕЧНАЯ АЭРОСТАТНО-МОБИЛЬНАЯ ЭЛЕКТРОСТАНЦИЯ (САМЭ) | 2020 |
|
RU2739220C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
Изобретения относятся к области радиотехники и связи и используются для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области. Изобретения направлены на обеспечение возможности автоматизации ориентации и стабилизации положения платформ, упрощения конструкции и обслуживания в процессе их эксплуатации с одновременным повышением надежности, непрерывности и длительности использования региональных сетей с предлагаемой платформой. Способ формирования региональных беспроводных сетей передачи информации включает размещенние воздушных телекоммутационных платформ на заданных высотах путем создания подъемной силы для их удержания в заданных точках регинальной сети географического региона, стабилизацию положения платформ в этих точках. Причем подъемную силу для каждой платформы создают с помощью дистанционно и/или автономно пилотируемого летательного аппарата за счет вертикальной составляющей его вектора тяги, а удержание этого летательного аппарата и платформы в заданной точке региональной сети географического региона осуществляют, связывая их с заданной точкой поверхности географического региона гибкой тягой, которую используют в качестве канала подачи энергии питания для обеспечения создания вектора тяги летательного аппарата. Стабилизацию положения платформы обеспечивают за счет инерциальной навигации летательного аппарата в заданной точке региональной сети географического региона. Узел формирования подъемной силы телекоммутационной воздушной платформы выполнен в виде фюзеляжа с приборным отсеком, связанного с винтовым движителем в виде, по меньшей мере, одной гондолы, в которой установлены электрический двигатель с редуктором и тяговым винтом. Фюзеляж связан посредством двухосного карданового подвеса с кабель-тросом, второй конец которого зафиксирован с возможностью изменения длины кабель-троса в заданной точке поверхности географического региона и связан с источником электрической энергии в этой точке. 2 н. и 9 з.п. ф-лы, 6 ил.
| СОВОКУПНОСТЬ ВОЗДУШНЫХ ПЛАТФОРМ СВЯЗИ И СПОСОБ ИХ ИСПОЛЬЗОВАНИЯ | 2000 |
|
RU2257016C2 |
| АНТЕННЫЙ ПРОВОД | 1991 |
|
RU2030039C1 |
| АЭРОСТАТНАЯ АНТЕННА | 1995 |
|
RU2097880C1 |
| ВСЕНАПРАВЛЕННАЯ ВЫСОТНАЯ АНТЕННА | 1994 |
|
RU2099827C1 |
| Устройство для звуковой сигнализации при чрезмерном па пении давления в маслопроводе тракторов, автомобилей и т.п. | 1931 |
|
SU28419A1 |
| WO 9851568 А, 19.11.1998 | |||
| DE 69421184 Т, 24.08.2000. | |||

