Изобретение относится к области радиолокационной техники, в частности, к корабельным радиолокационным станциям (РЛС) и радиолокационным комплексам (РЛК). Предлагаемое решение по РЛС может использоваться для обнаружения и сопровождения воздушных и надводных целей, является средством освещения воздушной и надводной обстановки, траекторной обработки информации и выдачи целеуказаний.
Известно решение по корабельной РЛС (патент Великобритании GB 2177566, дата публикации: 13.06.1986 г.), в котором для увеличения числа отраженных от цели импульсов предлагается излучать два или несколько лучей, разнесенных в горизонтальной плоскости на угол, соизмеримый по точности с шириной луча. Недостатком такого решения является то, что оно не приводит к скоростному увеличению темпа обновления информации и точности.
Другим близким аналогом заявляемого изобретения является корабельная трех-координатная РЛС ВМС США AN/SPS-48E (смотрите ссылку из сети Интернет https://books.google.ru/books?id=l-DzknmTgDUC) (По данным справочника The Naval Institute Guide to World Naval Weapons Systems 1997-1998). Антенная подсистема РЛС AN/SPS-48E осуществляет обзор пространства в вертикальной плоскости сканированием одного или группы лучей при круговом электромеханическом вращении антенного устройства в горизонтальной плоскости. Антенная подсистема антенного устройства РЛС AN/SPS-48E представляет собой волноводную щелевую решетку. Стабилизация луча диаграммы направленности антенного устройства по бортовой и килевой качкам осуществляется электронным способом. В зависимости от режима работы РЛС передающее устройство антенной подсистемы генерирует в соответствующих лучах высокую, среднюю и низкую излучаемую мощность. Основными недостатками РЛС AN/SPS-48E являются относительно низкий темп обновления радиолокационной информации и наличие интерференционных провалов при обнаружении целей, летящих под малыми углами места. Указанные недостатки могут привести к снижению устойчивости сопровождения, снижению и точности выдачи целеуказания.
Еще одним аналогом заявленного изобретения является корабельная трех-координатная радиолокационная станция (РЛС) (заявка 2003136038/09, дата публикации: 20.06.2005 г.), содержащая высокочастотную часть приемопередающего антенного устройства (Прибор 1), включающего приемопередающие антенны первого и второго каналов, первое устройство суммирования и разделения каналов, антенну государственного опознавания, волноводное устройство с поворотным устройством и многоканальное устройство с вращающимся сочленениями, связанные с устройством приводов и стабилизации электромеханическими связями. Устройство переключения режимов «эквивалент» - «антенна» связано со вторым устройством суммирования и разделения частотных каналов, который соответствующими двумя связями подключен к блокам приемников -передатчиков первого и второго каналов, а соответствующие входы блоков приемников - передатчиков первого и второго каналов через устройство формирования ЛЧМ сигналов связано с соответствующим выходом устройства отображения информации и управления режимами (Прибор 3), при этом соответствующие выходы блоков приемников - передатчиков первого и второго каналов подключены к соответствующим входам блоков устройства обработки, а выход устройства первого и второго каналов подсоединен к входу устройства детектирования и размножения сигналов, связанного по интерфейсам со входами потребителей информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов непосредственно и через блок обработки информации подключены к соответствующим входам устройства отображения и управления режимами РЛС, связанного через устройство управления приводами с устройством приводов и стабилизации. Основными недостатками РЛС по заявке 2003136038/09 от 14.10.2003 являются обобщенное представление построения РЛС без необходимого конкретного схемотехнического и системотехнического построения составных частей РЛС. Для повышения эффективности использования РЛС декларируются возможности по автоматизации операций включения, взаимодействия различных устройств, контроля работоспособности, управлению сканированием, выбору вида сигнала и метода его обработки, применению различных режимов обзора пространства и алгоритмов перемещения лучей, формирования и обработки сигналов, а для проведения регулировки приемопередающих устройств без излучения радиолокационных сигналов в эфир - возможность отключения передающих устройств от антенн и подключения их к «эквиваленту». Однако, решение целевых задач требует не декларирования возможностей как идеи, а подтверждения их тактико-технических характеристик (ТТХ) и их технической реализуемости в виде конкретных проектных решений. Обобщенное представление в данном случае не позволяет этого сделать. Так, возможности блоков 7 и 30 (по первичному патенту на изобретение РФ №2254593, дата публикации 20.06.2005 г.) неочевидны без структурного и схемотехнического представления реализации. Только раскрытие этих блоков и связей позволит создать проект и реальное изделие с подтверждением заявленных ТТХ и, более того, их техническое исполнение уже приведет к появлению необходимых новых блоков и новых необходимых взаимосвязей и новых дополнительных свойств.
Наиболее близким аналогом, взятым за прототип, является система управления радиолокационной станцией и радиолокационным комплексом, обеспечивающей функционирование при повышенном темпе обновления радиолокационной информации с высокими точностями измерениями координат цели и выдачи целеуказаний, расширение функциональных возможностей и повышение оперативной готовности вывода комплекса РЛС/РЛК на боевой режим работы, надежности, безопасности функционирования и точности определения координат. Заявленная система управления корабельной трехкоординатной радиолокационной станцией содержит высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства и устройства приводов управления и стабилизации. При этом волноводное поворотное устройство антенного устройства через устройство переключения режимов «эквивалент-антенна» соединено со вторым устройством суммирования и разделения частотных каналов, которое подсоединено к устройствам приемников-передатчиков первого и второго каналов, а входы устройств приемников-передатчиков первого и второго каналов через устройство формирования линейной частотной модуляцией сигналов связаны с выходом устройства отображения и управления режимами Прибор 3. Выходы устройств приемник-передатчиков первого и второго каналов подсоединены к входам устройства обработки, выход которого подключен к входу устройства детектирования и размножения сигналов, связанного с потребителями информации РЛС. Информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации подключены к устройству отображения и управления режимами Прибор 3, соединенного с переключателем «эквивалент-антенна». В систему введены гироазимутогоризонт ГАГ углов бортовой качки (БК) и килевой качки (КК), гирокомпас ГК, система электропитания РЛС, содержащая корабельный распределительный щит, вход которого подключен к основной сети и к резервной сети, а выход корабельного распределительного щита (41) через прибор 8 - к электропитанию приборов РЛС и выходу Прибора 9 (патент на изобретение РФ №2759515, дата публикации: 15.11.2021 г.). Основными недостатками прототипа являются:
A) наличие одного преобразователя частоты УРЧ-22 - отсюда низкая надежность привода ГВ и живучести РЛС;
Б) большое количество приборов РЛС - как минимум, два прибора: устройство обработки информации и прибор 14, таким образом, прототип имеет сложную конструкцию и функционал;
B) сложная система обработки курсового угла, которая приводит к необходимости применения дополнительных блоков обработки этих сигналов.
Техническим результатом заявленного изобретения является:
- повышение эксплуатационной надежности (показателей надежности - безотказность, долговечность, ремонтопригодность, живучесть);
- упрощение процессов регулировки системы управления на этапах проектирования, изготовления и эксплуатации жизненного цикла в штатных и нештатных ситуациях;
- ускорение и упрощение настроечных работ системы управления приводными устройствами;
- создание радиолокационных станций и радиолокационных комплексов с использованием простых технических решений, обеспечивающие низкую (невысокую) трудоемкость и себестоимость, позволяющие делать его массовым, при повышенном темпе обновления радиолокационной информации с высокими точностями измерениями координат цели и выдачи целеуказаний, расширение функциональных возможностей и повышения оперативной готовности вывода РЛС на боевой режим работы, надежности, безопасности функционирования и точности определения координат.
Указанный технический результат достигается за счет того, что система управления корабельной трехкоординатной радиолокационной станции содержит высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства, при этом волноводное поворотное устройство антенного устройства (30) через устройство переключения режимов «эквивалент-антенна» (28) соединено со вторым устройством суммирования и разделения частотных каналов (27), которое по соответствующим двум связям подсоединено к устройствам приемников - передатчиков первого (22) и второго (24) каналов, а соответствующие входы устройств приемников -передатчиков первого и второго каналов через устройство формирования линейной частотной модуляцией сигналов (25) связано с соответствующим выходом устройства отображения и управления режимами Прибор 3 (31), а соответствующие выходы устройств приемник - передатчиков первого (22) и второго (24) каналов подсоединены к соответствующим входам устройства обработки (23), выход которого подключен к входу устройства детектирования и размножения сигналов (26), связанного с потребителями информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации Прибор 5Р (29.2), подключены к устройству отображения и управления режимами Прибор 3 (31), соединенного с переключателем «эквивалент - антенна» (28), гироазимутогоризонт ГАГ (39.1, 39.2) углов бортовой качки БК и килевой качки КК, гирокомпас ГК (40), система электропитания РЛС, содержащая корабельный распределительный щит (35), вход которого через нормально-замкнутые контакты автомата переключения сети (34) подключен к основной сети (32) и через нормально - разомкнутые контакты к резервной сети (33), а выход корабельного распределительного щита (35) через Прибор 8 (37.1) к электропитанию Приборов РЛС и выходу Прибора 9 (36). При этом система содержит привод Прибора 1, состоящий из привода горизонтального вращения, включающего в себя индикаторный механизм горизонтального вращения ИМГВ (1), редуктор горизонтального вращения ГВ (2), тормоз ГВ (3), двигатель ГВ (4), привода бортовой качки, включающего в себя индикаторный механизм бортовой качки индикаторный механизм килевой качки ИМБК (5), редуктор БК (6), тормоз БК (7), двигатель БК (8), привода килевой качки, включающего в себя индикаторный механизм килевой качки ИМКК (9), редуктор КК (10), тормоз КК (11), двигатель КК (12), систему управления приводными устройствами РЛС, содержащую преобразователь частоты УРЧ-22 основной (13), УРЧ-22 резервный (14), часть Прибора 8 (37.2), электромашинный усилитель ЭМУ БК (15), электромашинный усилитель ЭМУ КК (16), часть Прибора 5Р (29.1), включающего в себя реле KV5 (38), модуль УПГВ1М (17), блок формирования пеленга антенны ФПА (18), вторичные источники электропитания (19), блок привод бортовой и килевой качек ПБКК (20), блок КПУ (21), при этом выход механизма ИМГВ по курсовому углу соединен с первым входом блока ФПА, выход гирокомпаса (40) по курсу своему соединен со вторым входом блока ФПА, первый выход блока ФПА по импульсу начала торможения соединен с первым входом модуля УПГВ1М, второй выход блока ФПА по пеленгу антенны соединен с третьим входом Прибора 3 (31), второй вход модуля УПГВ1М по признаку режим М соединен с первым выходом Прибора 3, третий вход модуля УПГВ1М по сигналу скорость М соединен с третьим выходом Прибора 3, четвертый вход модуля УПГВ1М по сигналу fп соединен с пятым выходом Прибора 8 (37.2), первый выход модуля УПГВ1М соединен со вторым входом Прибора 8 (37.2), второй выход модуля УПГВ1М вход реле KV5 соединен с шестым выходом Прибора 3, выход реле KV5 соединен с первым входом Прибора 8 (37.2), первый и второй выходы Прибора 8 соединены с первым и вторым входами УРЧ-22 основным, третий и четвертый выходы Прибора 8 соединены с первым и вторым входом УРЧ-22 резервным, второй выход модуля УПГВ1М соединен со входом тормоза ГВ, выход тормоза ГВ соединен со вторым входом блока контроль приводных устройств КПУ (21), первый выход блока ПБКК (21) соединен со входом тормоза БК, второй выход блока ПБКК соединен со входом электромашинного усилителя ЭМУ БК, третий выход блока ПБКК соединен с первым входом ГАГ (39.1), четвертый выход блока ПБКК соединен со входом тормоза КК, пятый выход блока ПБКК соединен со входом ЭМУ КК, шестой выход блока ПБКК соединен со вторым входом ГАГ, седьмой выход блока ПБКК соединен с третьим входом блока КПУ, первый вход блока ПБКК соединен с третьим выходом Прибора 3, второй вход блока ПБКК соединен с выходом двигателя БК, третий вход блока ПБКК соединен с выходом тормоза БК, четвертый вход блока ПБКК соединен с выходом механизма ИМБК, пятый вход блока ПБКК соединен с выходом двигателя КК, шестой вход блока ПБКК соединен с выходом тормоза КК, седьмой вход блока ПБКК соединен с выходом механизма ИМКК, восьмой вход блока ПБКК соединен с третьим выходом ГАГ (39.2), второй выход блока КПУ соединен с четвертым входом Прибора 3, первый выход ГАГ (39.1) соединен со входом механизма ИМБК, второй выход ГАГ (39.1) соединен со входом механизма ИМКК, при этом входы вторичных источники электропитания (19) соединены с соответствующими выходами прибора 8 (37.1), а входы электропитания Прибора 3 соединены с соответствующими выходами прибора 8 (37.1).
На аналогичной по структуре построения высокочастотной части антенного устройства, как в прототипе, с двумя самостоятельными каналами в двух разнесенных поддиапазонах частот с двумя устройствами суммирования и разделения частотных каналов. Механическая стабилизация оси вращения антенного устройства радиолокационных каналов и антенны системы государственного опознавания должна иметь возможность уменьшать или устранять влияние ошибок от качек корабля на характеристики РЛС. Высокие точности выдачи данных целеуказания достигаются за счет средств и приемов формирования диаграмм направленности антенного устройства с низким уровнем боковых лепестков, повышения в два раза темпа обновления информации, введения режима М, методов обработки информации для траекторного построения движения целей и статических и динамических свойств устройства приводов и стабилизации. Обзор пространства осуществляется двумя радиолокационными каналами путем электронного сканирования лучей в вертикальной плоскости и механического вращения антенного устройства в горизонтальной плоскости. Сканирование в вертикальной плоскости осуществляется за счет изменения частоты излучаемых сигналов по специальным программам в соответствии с установленными режимами работы. Программы сканирования задают очередность следования лучей и виды зондирующих сигналов. Для реализации необходимого энергетического потенциала и требуемой точности измерения дальности применяются сложные зондирующие сигналы с линейной частотной модуляцией (ЛЧМ). Управление длительностью импульса, частотой повторения, мощностью и видом излучаемых сигналов, которое осуществляется устройством отображения информации и управления режимами.
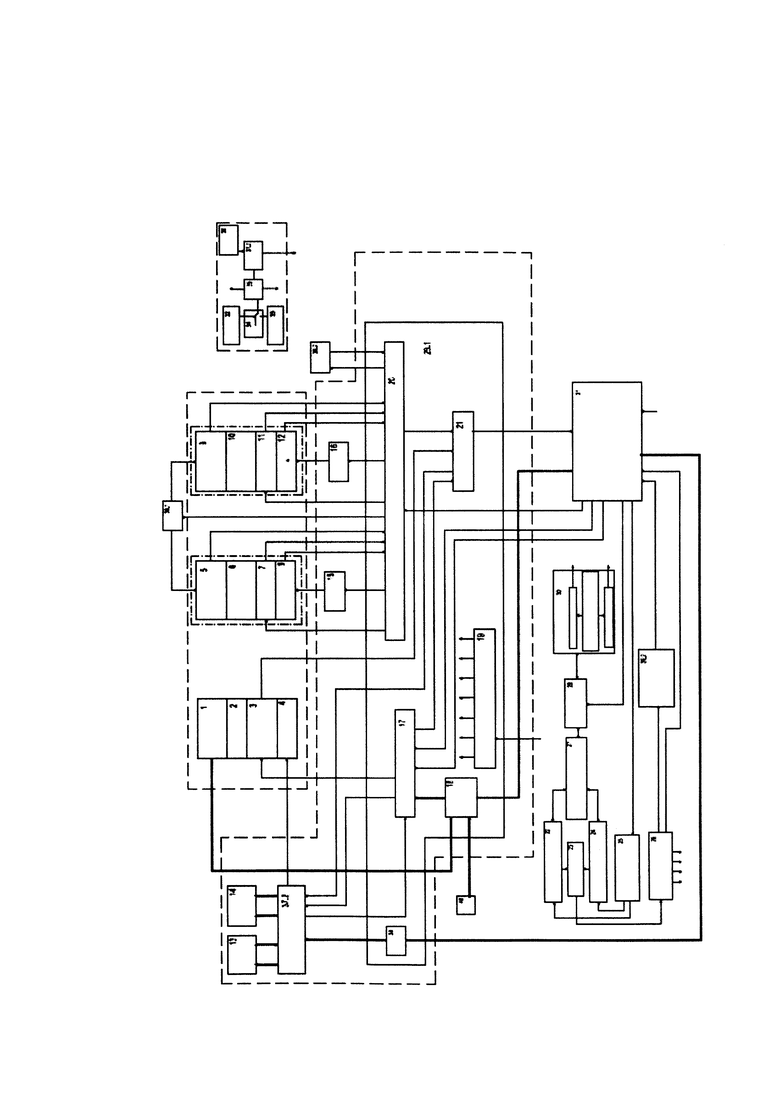
Основные составные части приборного состава и схемы деления устройств РЛС, их взаимосвязи и взаимодействие показаны на чертеже. РЛС состоит из следующих устройств в порядке, указанных на прилагаемом чертеже.
Функциональное назначение элементов приводной части РЛС.
Привод прибора 1 - содержит блоки с 1 по 12. Обеспечивает горизонтальное вращение и стабилизацию в плоскости горизонта антенного устройства.
1. ИМГВ - индикаторный механизм горизонтального вращения. Содержит инкрементный фотоэлектрический датчик углового положения антенны и синусно-косинусные датчики углового положения антенны.
2. Редуктор ГВ - понижающий редуктор привода ГВ с передаточным отношением 250.
3. Тормоз ГВ - электромагнитный тормоз вала двигателя ГВ. Принцип действия - катушка соленоида с подвижным сердечником. В обесточенном состоянии под воздействием пружины блокирует вал двигателя ГВ. При пропускании тока через катушку тормоза освобождает вал двигателя ГВ и вращение вала двигателя через редуктор ГВ приводит антенну в круговое вращение.
4. Двигатель ГВ - трехфазный асинхронный двигатель мощностью 7,5 кВт и с номинальной частотой вращения 3000 об/мин. Номинальное напряжение 380 В.
5. ИМБК - индикаторный механизм бортовой качки. Содержит СКВТ - приемник и шкалы грубого и точного отсчетов углов крена корабля. Содержит также сельсин-датчик угла крена.
6. Редуктор БК - понижающий редуктор с передаточным отношением 937.
7. Тормоз БК - тормоз вала двигателя бортовой качки. Принцип действия аналогичен тормозу ГВ.
8. Двигатель БК - коллекторный двигатель постоянного тока номинальной мощностью 760 Вт при номинальной частоте вращения 2500 об/мин. Содержит обмотку независимого возбуждения и тахогенератор постоянного тока.
9. ИМКК - индикаторный механизм килевой качки. Содержит СКВТ - приемник и шкалы грубого и точного отсчетов дифферента корабля. Содержит также сельсин-датчик угла дифферента.
10. Редуктор КК - понижающий редуктор с передаточным отношением 1579.
11. Тормоз КК - тормоз вала двигателя килевой качки. Принцип действия аналогичен тормозу ГВ.
12. Двигатель КК - двигатель, полностью идентичный двигателю БК.
Устройства управления приводной частью прибора 1 - содержат блоки с 13 по 21, 37, 38. Блоки 13…16 являются частью РЛС.Блоки с 17 по 21, 38 входят в состав прибора 5Р.
13. УРЧ-22 Осн. - основное устройство регулирования частоты вращения двигателя ГВ.
14. УРЧ-22 Резервы. - резервное устройство регулирования частоты вращения двигателя ГВ.
15. ЭМУ БК - электромашинный усилитель бортовой качки. Управляет вращением вала двигателя БК.
16. ЭМУ КК - электромашинный усилитель двигателя КК, полностью идентичный ЭМУ БК.
17. УПГВ1М - модуль управления приводом горизонтального вращения. Принимает сигналы управления частотой вращения АУ от прибора 3 (Блок 31), импульс ИНТ от устройства обработки информации (блок 18), сигнал пониженной частоты вращения fп от прибора 8 (блок 37.2), обеспечивает вращение АУ в заданных режимах постоянных частот вращения, частот вращения в режиме М и остановку антенны в положении 0-КУ. Входит в состав прибора 5Р.
18. Блок ФПА - принимает сигналы инкрементного фотоэлектрического датчика курсового угла Ку от механизма ИМГВ (блок 1), значение курса корабля Кс от гирокомпаса (блок 39) в виде синусно-косинусных составляющих. Выдает импульс начала торможения ИНТ ТТЛ уровня в положении 350° Ку и формирует пеленг антенны Па в виде последовательности 4096 импульсов ТТЛ уровня.
19. Вторичные источники электропитания - получают напряжение 3~50 Гц 220 В от прибора электропитания РЛС и преобразуют его в стабилизированные постоянные напряжения 5 В, ±6,3 В, ±12,6 В, ±27 В, ±110 В, необходимые для работы прибора 5Р.
20. Блок ПБКК - блок управления приводами бортовой и килевой качек. Принимает сигналы углового рассогласования с принимающих СКВТ механизмов ИМБК, ИМКК, усиливает их, преобразует в управляющие сигналы постоянного тока, усиливает эти сигналы и выдает на управляющие обмотки электромашинных усилителей ЭМУ БК, ЭМУ КК. Принимает сигналы демпфирования по скорости от тахогенераторов двигателей БК и КК. Принимает сигналы демпфирования по току якорей двигателей БК и КК. Контролирует срабатывание тормозов БК и КК. Контролирует наличие тока возбуждения двигателей БК и КК. Выдает опорное напряжение на дающие СКВТ ГАГ. Контролирует включенное состояние ГАГ. Формирует сигал исправности приводов БК и КК.
21. Блок КПУ - блок контроля исправности и управления приводами. Анализирует сигналы исправности приводов ГВ, БК и КК и формирует общий сигнал исправности прибора 5Р.
22. Приемник-передатчик первого канала.
23. Устройство обработки.
24. Приемник-передатчик второго канала.
25. Устройство формирования ЛЧМ - сигнала.
26. Устройство детектирования и размножения сигналов.
27. Второе устройство суммирования и разделения частотных каналов.
28. Переключатель эквивалент-антенна.
29. Устройство обработки информации (прибор 5Р).
29.1 - часть прибора, отвечающая за управление приводами,
29.2 - часть устройства, отвечающая за обработку отраженного от цели сигнала.
30. Антенное устройство, включающее антенны первого и второго каналов, первое устройство суммирования и разделения частотных каналов.
31. Устройство отображения информации и управления режимами работы всех устройств РЛС.
32. Основная корабельная электросеть 3~50 Гц 380 В.
33. Резервная корабельная электросеть 3~50 Гц 380 В.
34. Автомат переключения сети основная - резервная.
35. Корабельный электрощит КРЩ, расположенный в агрегатном помещении РЛС. Является источником электропитания всей РЛС.
36. Прибор 9, расположенный в центральном посту. Прибор управления подключения - отключения силового электропитания РЛС, распределяет электропитание по приборам РЛС.
37. Прибор 8, расположенный в агрегатном помещении. Прибор подключения РЛС к силовому электрощиту корабля. Контакторы прибора 8 управляются от прибора 9.
37.1 - часть прибора, отвечающая за распределение силового электропитания по приборам РЛС,
37.2 - часть прибора, отвечающая за управление приводными устройствами.
38. Реле KV5, являющееся составной частью прибора 5Р. Осуществляет стыковку и переключение основной-резервный с преобразователями частоты УРЧ-22 через прибор 8.
39. Гироазимутгоризонт (ГАГ) навигационного комплекса.
39.1 - часть ГАГ, передающая информацию о качках приводам БК и КК,
39.2 - часть ГАГ, сигнализирующая о своем состоянии для РЛС.
40. Гирокомпас (ГК) навигационного комплекса. Выдает в РЛС информацию о курсе корабля Кс.
Антенное устройство РЛС представляет собой вращающийся в горизонтальной плоскости узел Прибора 1 и располагаемый на механически стабилизированной по бортовой и килевой качке платформе. Высокочастотная часть антенного устройства (30) включает антенны первого и второго каналов, развернутые излучающими поверхностями в противоположные стороны, первое устройство суммирования и разделения частотных каналов, антенну государственного опознавания, многоканальное вращающее сочленение, волноводное поворотное устройство. Волноводное поворотное устройство антенного устройства через устройство переключения режимов «эквивалент» - «антенна» (28), включающее переключатель и «эквивалент», соединено со вторым устройством суммирования и разделения частотных каналов (27), которое по соответствующим двум связям подсоединено к устройствам приемников - передатчиков первого (22) и второго (24) каналов, а соответствующие входы устройств «приемников -передатчиков» первого и второго каналов подключены через соответствующие выводы к устройству формирования ЛЧМ сигнала (25), вход которого связан с соответствующим выходом устройства отображения и управления режимами Прибора 3 (31), а соответствующие выходы устройств приемников - передатчиков первого (22) и второго (24) каналов подключены к соответствующим входам устройства обработки (23), выход которого подключен к входу устройства детектирования и размножения сигналов (26), связанного выходами с входами внешних потребителей информации РЛС, а соответствующие первый и второй информационные выходы устройства детектирования и размножения сигналов, первый - непосредственно и второй - через устройство обработки информации (29), подключены к входам устройства отображения и управления режимами Прибора 3 (31).
Для проведения работ без излучения сигналов в эфир при регулировке, настройке, тестировании и контроле на разных стадиях жизненного цикла РЛС как изделия предприятия предусмотрена возможность отключения передающих устройств от антенн и подключение их к «эквиваленту» с помощью устройства переключения «эквивалент» - «антенна» (28), включающее переключатель и «эквивалент».
Электронное сканирование лучей в зонах обзора по углу места обеспечивается за счет дискретного изменения несущей частоты каждого из каналов.
Отраженные от целей радиолокационные сигналы принимаются антеннами антенного устройства (30), проходят первое устройство суммирования и разделения частотных каналов, устройство переключения режимов «эквивалент» - «антенна» (28), включающее переключатель и «эквивалент», второе устройство суммирования и разделения частотных каналов (27) и поступают в устройства приемников-передатчиков первого (22) и второго (24) каналов, с выходов которых сигналы передаются в устройство обработки (23). После этого сигналы поступают на устройство детектирования и размножения сигналов (26) и далее на устройство обработки информации (29) и устройство отображения информации и управления режимами радиолокационной станции (Прибор 3) (31) и к другим потребителям информации. Устройство отображения информации и управления режимами радиолокационной станции (31) является автоматизированным рабочим местом (АРМ) оператора РЛС для ввода исходных данных и сопровождения целей. В состав устройства отображения информации и управления режимами радиолокационной станции (Прибор 3) входят пульт управления и блок отображения информации.
Управление режимами вращения и стабилизации РЛС осуществляется за счет следующего структурного и схемотехнического представления реализации.
В РЛС введены гироазимутогоризонт ГАГ углов БК и КК (39.1 и 39.2), гирокомпас ГК (40), система электропитания РЛС, содержащая корабельный распределительный щит (КРЩ) (35), вход которого через нормально-замкнутые контакты автомата переключения сети (АПС) (34) подключен к основной сети (32) и через нормально - разомкнутые контакты к резервной сети (33), а выход корабельного распределительного щита (КРЩ) (35) через прибор 8 (37) к электропитанию приборов РЛС и входу Прибора 9 (36) управления подключением - отключением силового электропитания РЛС.
Выход гирокомпаса ГК (40) линией связи «курс свой» (КС) по магистральному последовательному интерфейсу ГОСТ Р 52070-2003 в соответствии с протоколом информационного и электрического сопряжения СИНС «Ладога-МЭ-11356» подсоединен к входу устройства отображения информации и управления режимами Прибор 3 (31). Протокол определяет состав, объем, форматы передаваемой информации, организацию взаимодействия, параметры электрического и физического сопряжения СИНС «Ладога-МЭ-11356» с изделием «Фрегат-М2ЭМ». Информация по механизму взаимодействующих процессов передается в 2-х форматах: - массив M1 в формате 7 и - команда синхронизации в формате 9.
При этом электромеханическая приводная часть Прибора 1 содержит три введенные части системы управления антенным устройством, состоящие из канала привода горизонтального вращения (ПГВ), содержащего двигатель ГВ, тормоз ГВ, редуктор ГВ, индикаторный механизм горизонтального вращения ИМГВ и двух аналогичных каналов приводов стабилизации бортовой и килевой качек (ПСБК и ПСКК), каждый из которых включает механически связанные соответствующий двигатель (БК и КК), соответствующий управляемый тормоз (БК и КК), редуктор соответствующего канала (БК и КК), соединенный с соответствующим объектом управления антенного устройства, и индикаторный механизм соответствующего канала (ИМБК (5) и ИМКК (9)), а выход индикаторного механизма привода горизонтального вращения ИМГВ (1) по линии связи «курсовой угол» (Ку) подключен к входу блока ФПА (18).
Система управления электромеханической приводной частью антенного устройства (приводная часть Прибора 1) содержит введенные устройства регулирования частоты УРЧ-22 основной (13) и резервный (14), электромашинные усилители ЭМУ БК (15) и ЭМУ КК (16) и Прибор 5Р, включающий следующие части - модуль управления приводом горизонтального вращения УПГВ1М (17), блок управления приводами бортовой и килевой качки ПБКК (20), блок контроля исправности и управления приводами КПУ (21) и вторичные источники электропитания (19), одноименные входные шины питания подключены к выходам Прибора 8 (37) системы электропитания, а выходы вторичных источников электропитания (19) связаны шинами питания с соответствующими входными клеммами прибора 5Р.
При этом второй выход устройства обработки информации с блока ФПА (18) по линии связи «Па 4096 имп.» связан с третьим входом устройства отображения и управления режимами Прибора 3 (31), а третий выход устройства обработки информации с блока ФПА (18) по линии связи «импульса начала торможения ИНТ» - к первому входу модуля управления приводом горизонтального вращения (УПГВ1М) (17) Прибора 5Р системы управления приводными устройствами РЛС, первый выход модуля управления приводом горизонтального вращения (УПГВ1М) (17) Прибора 5Р подключен к первому входу прибора 8 (37.2), соответствующие выходы которого соединены со входами усилителя - устройства регулирования частоты УРЧ-22 (13) основного и УРЧ-22 (14) резервного. Выходы УРЧ-22 основного и резервного подключены к соответствующим входам Прибора 8 (37.2). Реле KV5 (38) коммутирует выходы УРЧ-22 основного или резервного на выход прибора 8 (37.2), соединенный с двигателем ГВ (4). Второй выход модуля управления приводом горизонтального вращения (УПГВ1М) (17) соединен с управляющим входом тормоза ГВ (3). Выход прибора 8 сигналом «fп» подключен ко входу модуля УПГВ1М (17).
При этом соответствующие входы индикаторных механизмов каждого из двух каналов электромеханических приводов стабилизации бортовой и килевой качек (ПСБК и ПСКК) ИМБК (5) и ИМКК (9) системы управления антенным устройством (приводная часть Прибора 1) подключены к соответствующим информационным выходам «угол БК» и «угол КК» гироазимутогоризонта «ГАГ 1.1» (30.1), вход которого связан с выходом «опорного напряжения UОП» блока управления приводов бортовой и килевой качки ПБКК (17), входящего в состав Прибора 5Р системы управления приводными устройствами РЛС, а соответствующие входы блока управления приводов бортовой и килевой качки ПБКК (17) подключены к соответствующим выходам индикаторных механизмов ИМБК (5) и ИМКК (9), «состояния тормозов БК (7) и КК (11)» и двигателей БК (8) и КК (12) каждого из двух каналов электромеханических приводов стабилизации бортовой и килевой качек системы управления антенным устройством (приводная часть Прибора 1), а соответствующие выходы сигналов управления каждого канала стабилизации блока управления приводов бортовой и килевой качки ПБКК (17) подсоединены через соответствующие электромашинные усилители ЭМУ БК (14) и ЭМУ КК (15) системы управления антенным устройством к соответствующим входам двигателей БК (8) и КК (12) каждого из двух каналов электромеханических приводов стабилизации бортовой и килевой качек системы управления антенным устройством (приводная часть Прибора 1), а соответствующие выходы питания тормозов БК (7) и КК (11) блока управления электромеханических приводов бортовой и килевой качки ПБКК (17) связаны с соответствующими входами питания тормозов БК (7) и КК (11).
При этом выходная клемма с напряжением «+5 В» блока управления электромеханических приводов бортовой и килевой качки блока ПБКК (17) подсоединена к входу определения состояния включения гироазимутогоризонта «ГАГ 1.2» (39.2), выход которого соединен с входом «ГАГ вкл.» блока управления электромеханических приводов бортовой и килевой качки ПБКК (20).
Причем выводы «сигналов исправности»: «Испр. ПГВ» модуля управления приводом горизонтального вращения (УПГВ1М) (17) блока Прибора 5Р и «Испр. ПБКК» блока управления электромеханических приводов бортовой и килевой качки ПБКК (20) подключены к соответствующим входам блока контроля и индикации КПУ (21) Прибора 5Р, в котором соответствующим образом объединяются, а выход блока контроля и индикации КПУ (21) Прибора 5Р подключен к четвертому входу устройства отображения и управления режимами Прибора 3 (31) по линии связи «Испр. Прибора 5Р», а соответствующие выходы сигналов управления устройства отображения и управления режимами Прибора 3 (31) подсоединены к соответствующим входам модуля управления приводом горизонтального вращения (УПГВ1М) (17) Прибора 5Р, к входу блока управления приводов бортовой и килевой качки ПБКК (20) и к входу устройства переключения режимов «эквивалент» - «антенна» (28), включающее переключатель и «эквивалент». Эта связь необходима для проведения работ без излучения сигналов в эфир при регулировке, настройке, тестировании и контроле на разных стадиях жизненного цикла РЛС - как изделия предприятия, поэтому предусмотрена возможность отключения передающих устройств от антенн и подключение их к «эквиваленту» с помощью устройства переключения «эквивалент» -«антенна» (28), содержащего переключатель и «эквивалент».
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2373550C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| АНТЕННАЯ СИСТЕМА СО СТАБИЛИЗИРОВАННОЙ ПЛОСКОСТЬЮ ВРАЩЕНИЯ ОБЗОРНОГО КОРАБЕЛЬНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2301482C2 |
| СПОСОБ ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ ЗОНЫ ОБЗОРА РЛС | 2007 |
|
RU2343532C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| КОРАБЕЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2293405C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
Изобретение относится к области радиолокационной техники, в частности, к корабельным радиолокационным станциям (РЛС) и радиолокационным комплексам (РЛК). Техническим результатом заявленного изобретения является: повышение эксплуатационной надежности, упрощение процессов регулировки системы управления, ускорение и упрощение настроечных работ системы управления приводными устройствами. Результат достигается тем, что система управления корабельной трехкоординатной радиолокационной станции, содержащая высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства, при этом волноводное поворотное устройство антенного устройства через устройство переключения режимов «эквивалент-антенна» соединено со вторым устройством суммирования и разделения частотных каналов, которое по соответствующим двум связям подсоединено к устройствам приемников - передатчиков первого и второго каналов. 1 з.п. ф-лы, 1 ил.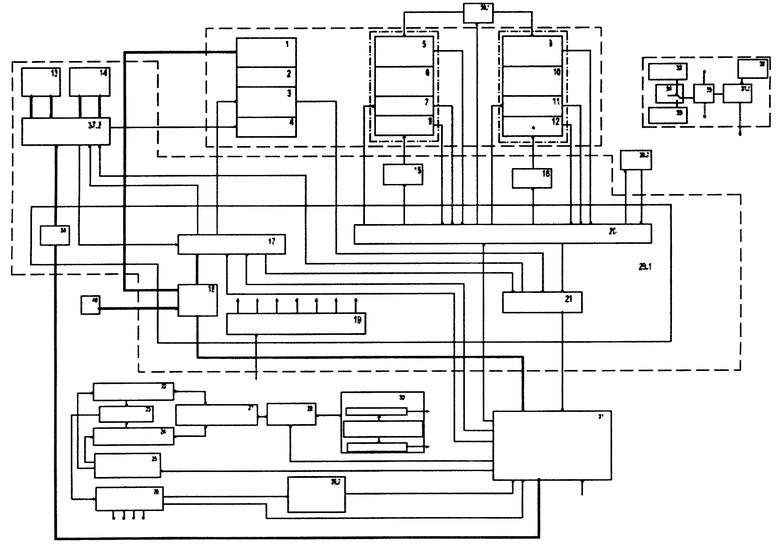
1. Система управления корабельной трехкоординатной радиолокационной станции, содержащая высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства, при этом волноводное поворотное устройство антенного устройства (30) через устройство переключения режимов «эквивалент-антенна» (28) соединено со вторым устройством суммирования и разделения частотных каналов (27), которое по соответствующим двум связям подсоединено к устройствам приемников - передатчиков первого (22) и второго (24) каналов, а соответствующие входы устройств приемников - передатчиков первого и второго каналов через устройство формирования линейной частотной модуляцией сигналов (25) связано с соответствующим выходом устройства отображения и управления режимами (далее - Прибор 3) (31), а соответствующие выходы устройств приемников - передатчиков первого (22) и второго (24) каналов подсоединены к соответствующим входам устройства обработки (23), выход которого подключен к входу устройства детектирования и размножения сигналов (26), связанного с потребителями информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации (далее - Прибор 5Р) (29.2) подключены к устройству отображения и управления режимами Прибор 3 (31), соединенного с переключателем «эквивалент-антенна» (28), гироазимутогоризонт ГАГ (39.1, 39.2) углов бортовой качки БК и килевой качки КК, гирокомпас ГК (40), система электропитания РЛС, содержащая корабельный распределительный щит (35), вход которого через нормально замкнутые контакты автомата переключения сети (34) подключен к основной сети (32) и через нормально разомкнутые контакты к резервной сети (33), а выход корабельного распределительного щита (35) через прибор подключения РЛС к силовому электрощиту корабля (далее - Прибор 8) (37.1) к электропитанию Приборов РЛС и выходу прибора управления подключения - отключения силового электропитания РЛС (далее - Прибора 9) (36).
2. Система управления корабельной трехкоординатной радиолокационной станции по п. 1, отличающаяся тем, что она содержит привод приемопередающего антенного устройства (далее - Прибора 1), состоящий из привода горизонтального вращения, включающего в себя индикаторный механизм горизонтального вращения ИМГВ (1), редуктор горизонтального вращения ГВ (2), тормоз ГВ (3), двигатель ГВ (4), привода бортовой качки, включающего в себя индикаторный механизм бортовой качки индикаторный механизм килевой качки ИМБК (5), редуктор БК (6), тормоз БК (7), двигатель БК (8), привода килевой качки, включающего в себя индикаторный механизм килевой качки ИМКК (9), редуктор КК (10), тормоз КК (11), двигатель КК (12), систему управления приводными устройствами РЛС, содержащую устройство регулирования частоты вращения двигателя (далее - преобразователь частоты УРЧ-22) основной (13), УРЧ-22 резервный (14), часть Прибора 8 (37.2), электромашинный усилитель ЭМУ БК (15), электромашинный усилитель ЭМУ КК (16), часть Прибора 5Р (29.1), включающего в себя реле KV5 (38), модуль управления приводом горизонтального вращения (далее - УПГВ1М (17)), блок формирования пеленга антенны ФПА (18), вторичные источники электропитания (19), блок привод бортовой и килевой качек ПБКК (20), блок КПУ (21), при этом выход механизма ИМГВ по курсовому углу соединен с первым входом блока ФПА, выход гирокомпаса (40) по курсу своему соединен со вторым входом блока ФПА, первый выход блока ФПА по импульсу начала торможения соединен с первым входом модуля УПГВ1М, второй выход блока ФПА по пеленгу антенны соединен с третьим входом Прибора 3 (31), второй вход модуля УПГВ1М по признаку режим М соединен с первым выходом Прибора 3, третий вход модуля УПГВ1М по сигналу скорость М соединен с третьим выходом Прибора 3, четвертый вход модуля УПГВ1М по сигналу fn соединен с пятым выходом Прибора 8 (37.2), первый выход модуля УПГВ1М соединен со вторым входом Прибора 8 (37.2), вход реле KV5 соединен с шестым выходом Прибора 3, выход реле KV5 соединен с первым входом Прибора 8 (37.2), первый и второй выходы Прибора 8 соединены с первым и вторым входами УРЧ-22 основным, третий и четвертый выходы Прибора 8 соединены с первым и вторым входом УРЧ-22 резервным, второй выход модуля УПГВ1М соединен со входом тормоза ГВ, выход тормоза ГВ соединен со вторым входом блока контроля приводных устройств КПУ (21), первый выход блока ПБКК (21) соединен со входом тормоза БК, второй выход блока ПБКК соединен со входом электромашинного усилителя ЭМУ БК, третий выход блока ПБКК соединен с первым входом ГАГ (39.1), четвертый выход блока ПБКК соединен со входом тормоза КК, пятый выход блока ПБКК соединен со входом ЭМУ КК, шестой выход блока ПБКК соединен со вторым входом ГАГ, седьмой выход блока ПБКК соединен с третьим входом блока КПУ, первый вход блока ПБКК соединен с третьим выходом Прибора 3, второй вход блока ПБКК соединен с выходом двигателя БК, третий вход блока ПБКК соединен с выходом тормоза БК, четвертый вход блока ПБКК соединен с выходом механизма ИМБК, пятый вход блока ПБКК соединен с выходом двигателя КК, шестой вход блока ПБКК соединен с выходом тормоза КК, седьмой вход блока ПБКК соединен с выходом механизма ИМКК, восьмой вход блока ПБКК соединен с третьим выходом ГАГ (39.2), второй выход блока КПУ соединен с четвертым входом Прибора 3, первый выход ГАГ (39.1) соединен со входом механизма ИМБК, второй выход ГАГ (39.1) соединен со входом механизма ИМКК, при этом входы вторичных источников электропитания (19) соединены с соответствующими выходами прибора 8 (37.1), а входы электропитания Прибора 3 соединены с соответствующими выходами прибора 8 (37.1).
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| WO 2007021217 A1, 22.02.2007 | |||
| CN 104166138 A, 26.11.2014. | |||

