Изобретение относится к оптико-механическому приборостроению, в частности к устройствам для наведения лазерного луча на объекты в пространстве, и может быть использовано для работы в ограниченных углах точных контуров наведения двухконтурных систем наведения лазерных комплексов.
Известен способ управления оптическим лучом в пространстве, основанный на применении оптического клина с переменным преломляющим углом, образующимся в результате поворота одной из линз двухлинзовой системы вокруг точки, находящейся на оптической оси. Этот способ позволяет развертывать оптический луч по любой траектории, однако его применение ограничено сложной оптико-механической конструкцией, и уже при малых величинах угла поворота подвижной линзы происходит ухудшение качества оптического изображения из-за возникновения в линзах нецентрированных аберраций [1].
Известен способ отклонения оптического луча раздельным поворотом двух оптических клиньев вокруг оптической оси оптического прибора, параллельной развертываемому лучу [2]. Этот способ позволяет развертывать оптический луч по любой траектории и, в частности, по одной из следующих: розеточной, спиральной, циклоидальной, круговой и строчной, каждая из которых может быть получена только при определенном отношении скоростей вращения оптических клиньев. Такой способ развертывания оптического луча требует больших углов поворота оптических клиньев для обеспечения развертывания оптического луча по любой траектории, в том числе и для малых амплитуд развертки. Кроме того, недостатком способа является отсутствие возможности осуществлять в автоматическом режиме сопровождение и наведение луча на подвижные пространственные объекты.
Наиболее близким по технической сущности к предлагаемому способу является способ развертывания оптического луча [3] путем раздельного поворота двух оптических клиньев, установленных по ходу луча, ребра оптических клиньев предварительно ориентируют непараллельно друг другу, и угол поворота одного из оптических клиньев определяют из соотношения: F1=K1A 2 х-Ax(K2+K3A 2 х)+K4AyA 2 х, а угол поворота другого оптического клина определяют из соотношения: F2=K5A 2 у-Ay(K6+Y7A 2 у)+K8AxA 2 у, где F1, F2 - углы поворота оптических клиньев относительно исходного состояния; K1 …. K8 - коэффициенты, определяемые оптическими характеристиками каждого из клиньев; Ах, Ау - приращения угловых координат луча на траектории развертывания, х, у - угловые координаты точки на траектории развертывания.
Недостатками способа являются низкое быстродействие и точность ввиду громоздкости необходимых вычислительных процедур для углов поворота клиньев и сложности предварительных процедур по ориентировке ребер оптических клиньев. Кроме того, недостатком способа является отсутствие возможности осуществлять в автоматическом режиме сопровождение и наведение луча на подвижные пространственные объекты с высокой точностью.
Задачей изобретения является создание способа наведения лазерного луча на объект с повышенными эксплуатационными характеристиками за счет увеличения его быстродействия, точности и возможности осуществлять в автоматическом режиме сопровождение и наведение луча на подвижные пространственные объекты.
Поставленная задача решается тем, что в известном способе наведения лазерного луча, включающем поворот двух оптических клиньев, установленных по ходу луча, определение угла поворота каждого оптического клина по заданным соотношениям для необходимого приращения координаты луча в прямоугольной системе координат, значение необходимого приращения координаты луча определяют как ошибку наведения луча из соотношений:
Δρ=ρ1-ρ2, где: Δρ - ошибка наведения полярного радиуса отметки луча; ρ1 - полярный радиус отметки объекта; ρ2 - полярный радиус отметки луча; Δϕ=ϕ1-ϕ2, где: Δϕ - ошибка наведения полярного угла отметки луча; ϕ1 - полярный угол отметки объекта; ϕ2 - полярный угол отметки луча; при этом координаты объекта и луча в полярной системе координат определяют по координатам в прямоугольной системе координат из соотношений:
 ϕ1=arctg Y1/X1; ϕ2=arctg Y2/X2,
ϕ1=arctg Y1/X1; ϕ2=arctg Y2/X2,
где: X1, Y1 и X2, Y2 - координаты соответственно объекта и луча в прямоугольной системе координат, отработку необходимого приращения координаты осуществляют в автоматическом режиме, связанно поворачивая два оптических клина, одновременно управляя полярным радиусом, поворачивая клинья на одинаковые углы в разные стороны, и полярным углом, поворачивая те же клинья на одинаковые углы в одну сторону.
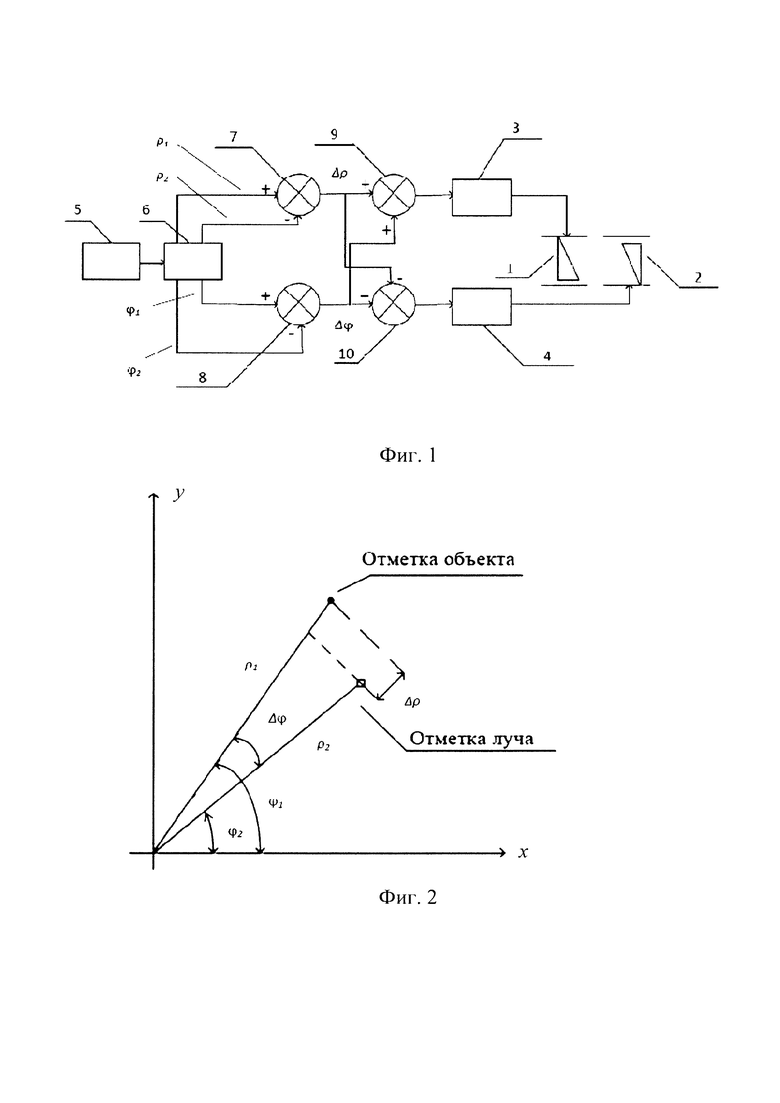
Предлагаемый способ наведения лазерного луча на объект осуществляется в соответствии со структурной схемой системы наведения лазерного луча следующим образом (фиг. 1). Для поворота клиньев 1 и 2 используются два безредукторных привода 3 и 4 на базе кольцевых электродвигателей (для каждого клина свой двигатель). Для управления приводами используется информация с телевизионного приемного устройства 5 о координатах объекта и отметки луча, полученная в прямоугольной системе координат (координаты X и Y), эти значения в преобразователе координат 6 преобразуют в значения полярных радиусов ρ1 и полярных углов ϕ1 отметок объекта и полярных радиусов ρ2 и полярных углов ϕ2 отметок луча, используя соотношения:
 ϕ1=arctg Y1/X1; ϕ2=arctg Y2/Х2,
ϕ1=arctg Y1/X1; ϕ2=arctg Y2/Х2,
где: X1, Y1 и X2, Y2 - координаты соответственно объекта и луча в прямоугольной системе координат. Значения полярных координат объекта и отметки луча подаются на дискриминаторы 7 и 8, в которых вычисляются ошибки наведения луча на объект в поле зрения приемника как рассогласование между отметкой объекта (в приемном устройстве полярные координаты ρ1 ϕ1) и отметкой луча (в приемном устройстве полярные координаты ρ2 ϕ2) (фиг. 2). Причем дискриминатор 7 определяет рассогласование (ошибку наведения) полярных радиусов Δρ, а дискриминатор 8 - рассогласование (ошибку наведения) полярных углов Δϕ. Сигналы с выхода дискриминаторов поступают в сумматоры 9 и 10, причем в сумматоре 9 суммируются сигналы Δρ и Δϕ с одинаковыми знаками, а в сумматоре 10 суммируются сигналы Δρ и Δϕ с противоположными знаками. То есть вычисляются и подаются для управления приводами просуммированные ошибки наведения Δρ и Δϕ. На фиг. 2 показано нахождение отметки объекта и отметки луча в первом квадранте координатной плоскости, когда координаты X и Y положительны, в противном случае при определении величины полярного угла необходимо учитывать, в каких квадрантах эти отметки находятся.
Система наведения лазерного луча в соответствии со структурной схемой работает по предлагаемому способу следующим образом. Верхняя ветвь схемы будет управлять величиной полярного радиуса отметки луча путем синхронного разворота клиньев в разные стороны, для чего на один привод подается «+Δρ», а на другой «-Δϕ». Одновременно с этим нижняя ветвь схемы, формируя дополнительный сигнал для тех же двигателей, будет управлять синхронным поворотом тех же клиньев на величину Δϕ в одну и ту же сторону, тем самым осуществляя управление полярным углом отметки луча. Здесь в сумматорах 9 и 10 алгебраически суммируются сигналы управления, приводы (каждый!) отрабатывают итоговый суммарный (Δϕ+/-Δρ) сигнал своего канала, реализуя слежение по ошибкам, пересчитанным в полярные координаты. Таким образом осуществляется автоматический режим наведения. Существенно, что для работы в автоматическом режиме по предлагаемому способу достаточно одной пары оптических клиньев, в то время как независимое отклонение луча в автоматическом режиме в прямоугольнных координатах X и Y требует двух пар клиньев, что может вызывать взаимное влияние приводов по координатам X и Y и привести к дополнительным ошибкам наведения.
Возможность работы устройства в автомагическом режиме по ошибке, замеряемой непосредственно в приемном устройстве, позволяет обеспечить высокое быстродействие и точность наведения луча. Благодаря исключению сложных процедур по предварительной юстировке ребер клиньев, наличию жестких кинематических связей между вращающимися частями устройства, исключающих люфты и упругие деформации в элементах конструкции, передающих вращающий момент, обеспечивается высокая точность конструкции, что повышает точность наведения.
Источники информации
1. Еськов Д.Н. Автоматическая стабилизация оптического изображения. - Л.: Машиностроение, 1988, с. 54-58, рис. 3.2(a).
2. Катыс Г.П. Автоматическое сканирование. - М.: Машиностроение, 1969, с. 227-230.
3. Патент RU 2097811 С1 опубл. 1997.11.27 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наведения лазерного луча на объект | 2023 |
|
RU2807586C1 |
| Способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника | 2019 |
|
RU2722224C1 |
| УСТРОЙСТВО ЛОКАЦИИ И НАВИГАЦИИ | 2012 |
|
RU2525228C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТОВ ПО ИХ ИЗОБРАЖЕНИЯМ ПРЕИМУЩЕСТВЕННО В КОСМОСЕ | 2014 |
|
RU2568335C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ ПО ИХ ТЕЛЕВИЗИОННЫМ ИЗОБРАЖЕНИЯМ | 2008 |
|
RU2381521C2 |
| Способ сканирования пространства лазерным лучом и определения координат обнаруженных объектов | 2022 |
|
RU2794869C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР НА ОДНОМ ОБЪЕКТИВЕ | 2002 |
|
RU2212698C1 |
| Способ определения поверхности диэлектрической бифокальной линзовой антенны | 2019 |
|
RU2715914C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА С ПОМОЩЬЮ ДАЛЬНОМЕРНО-УГЛОМЕРНЫХ ПРИБОРОВ | 2014 |
|
RU2567865C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА И МАССЫ ПРОТИВОВЕСА (ВАРИАНТЫ) | 2001 |
|
RU2205376C2 |
Изобретение относится к оптико-механическому приборостроению, к устройствам для наведения лазерного луча на объекты в пространстве. Способ наведения лазерного луча на объект, включает поворот двух оптических клиньев, установленных по ходу луча, определение угла поворота каждого оптического клина по заданным соотношениям для необходимого приращения координаты луча в прямоугольной системе координат. Значение необходимого приращения координаты луча определяют как ошибку наведения, при этом координаты объекта и луча в полярной системе координат определяют по координатам в прямоугольной системе координат, отработку необходимого приращения координаты осуществляют в автоматическом режиме, связанно поворачивая два оптических клина, одновременно управляя полярным радиусом, поворачивая клинья на одинаковые углы в разные стороны, и полярным углом, поворачивая те же клинья на одинаковые углы в одну сторону. Технический результат - повышение эксплуатационных характеристик за счет увеличения быстродействия, точности и возможности осуществлять в автоматическом режиме сопровождение и наведение луча на подвижные пространственные объекты. 2 ил.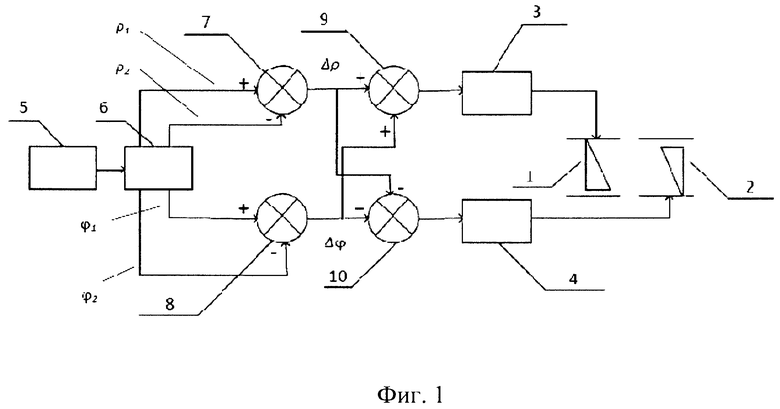
Способ наведения лазерного луча на объект, включающий поворот двух оптических клиньев, установленных по ходу луча, определение угла поворота каждого оптического клина по заданным соотношениям для необходимого приращения координаты луча в прямоугольной системе координат, отличающийся тем, что значение необходимого приращения координаты луча определяют как ошибку наведения луча из соотношений:
Δρ=ρ1-ρ2, где:
Δρ - ошибка наведения полярного радиуса отметки луча;
ρ1 - полярный радиус отметки объекта;
ρ2 - полярный радиус отметки луча;
Δϕ=ϕ1-ϕ2, где:
Δϕ - ошибка наведения полярного угла отметки луча;
ϕ1 - полярный угол отметки объекта;
ϕ2 - полярный угол отметки луча;
при этом координаты объекта и луча в полярной системе координат определяют по координатам в прямоугольной системе координат из соотношений:
ϕ1=arctg Y1/X1;
ϕ2=arctg Y2/Х2, где:
X1, Y1 и X2, Y2 - координаты соответственно объекта и луча в прямоугольной системе координат, отработку необходимого приращения координаты осуществляют в автоматическом режиме, связанно поворачивая два оптических клина, одновременно управляя полярным радиусом, поворачивая клинья на одинаковые углы в разные стороны, и полярным углом, поворачивая те же клинья на одинаковые углы в одну сторону.
| СПОСОБ РАЗВЕРТЫВАНИЯ ОПТИЧЕСКОГО ЛУЧА | 1995 |
|
RU2097811C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ЛУЧА ЧЕРЕЗ АТМОСФЕРУ | 2016 |
|
RU2706292C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ (ВАРИАНТЫ) | 2010 |
|
RU2428777C1 |
| УСТРОЙСТВО НАВЕДЕНИЯ ЛАЗЕРНОГО ЛУЧА | 2001 |
|
RU2224270C2 |
| US 8415600 B2, 09.04.2013. | |||

