Изобретение относится к области информационно-измерительной техники и предназначено для решения задач навигации и обнаружения бортовыми системами летательных аппаратов (ЛА) наземных целей.
В настоящее время для решения задач навигации ЛА могут использоваться внешние наземные системы навигации, инерциальные системы навигации, магнитные системы, радиотехнические средства, оптические средства, в том числе лазерные, акустические, а также интегрированные системы, содержащие в себе инерциальный блок и дополнительные средства, такие как системы спутниковой навигации, магнитометры, астронавигационные средства, радиовысотомеры и т.д.
В наземной радионавигационной системе Loran [1] измеряется разность моментов приема сигналов от двух пар станций; разность времени является мерой разности расстояний, при этом линии равных разностей представляют собой семейство гипербол. Пересечение соответствующих позиционных линий и дает местоположение. Недостатком данной системы является низкая точность и локальность.
Инерциальные системы обладают возможностью автономного использования, но имеют свойство накопления ошибки. Для обеспечения требуемой точности определения координат комплексируют инерциальные механизмы с системами спутниковой навигации.
Спутниковые системы навигации позволяют решить ряд проблем земных радионавигационных систем и бортовых инерциальных систем.
Аппаратура спутниковых систем позволяет использовать диапазон ультракоротких волн, такие его преимущества, как высокая пропускная способность, высокая точность измерений. Также земные и бортовые системы навигации не могут обеспечить навигационные определения с одинаково высокой точностью независимо от места нахождения, времени и условий действия обслуживаемых объектов, что обеспечивают спутниковые системы.
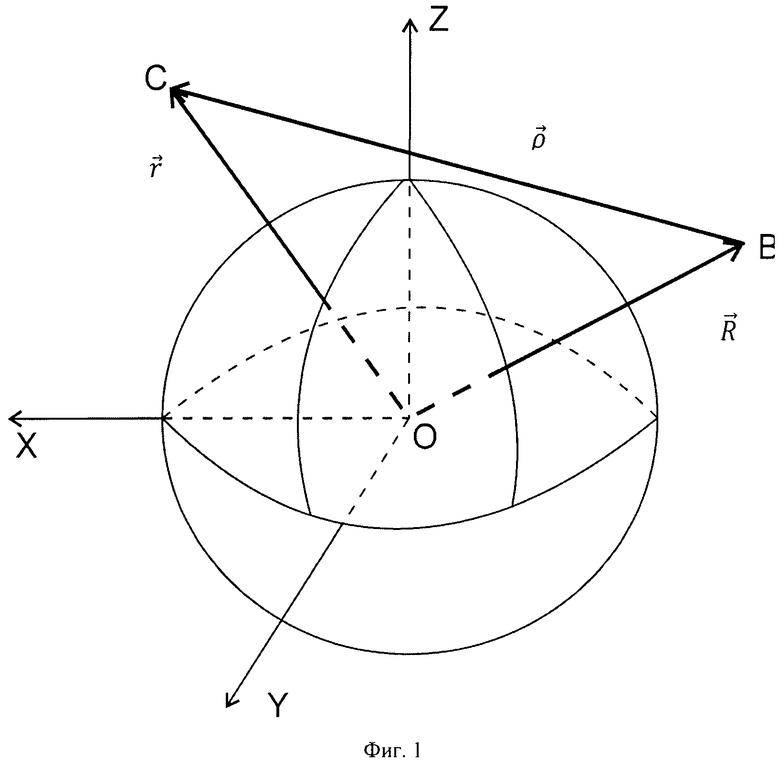
В спутниковых навигационных системах в момент взаимной видимости между управляемым объектом (т. В на Фиг.1) и навигационным спутником (т. С на Фиг.1) непрерывно посылаются радиосигналы с информацией о своем местоположении, которое определяется планетоцентрическим радиус-вектором 

Линейная операция над векторами 



При разностно-дальномерном способе определяется навигационный параметр Δρ=ρ2-ρ1, который измеряется непосредственно или интегрированием измеренных величин радиальной скорости 

где
A0=Δρ2+(x2-х1)2+(y2-y1)2+(z2-z1)2;
A1=x2-x1; A2=y2-y1; А3=z2-z1
После возведения (1) в квадрат и приведения подобных членов получим (2)

в котором



a12=4A1A2; a23=4A2A3; a13=4A1A3;
a14=2(2x2Δρ2-A0A1); a24=2(2y2Δρ2-A0A2);
a34=2(2z2Δρ2-A0A3); 
Эти коэффициенты вычисляются по известным координатам спутников и измеренным значениям Δρ. Поверхность, представленная данным уравнением, является двухполостным гиперболоидом. Пересечение его с поверхностью шара является сферической гиперболой. Для того чтобы определить положение объекта разностно-дальномерным методом в трехмерном пространстве надо измерить не менее трех величин Δρi, (i=1, 2, 3). Тогда задача сведется к решению системы алгебраических нелинейных уравнений

котором
k1=a11; k2=a22; k3=a33; k4=2a12;
k5=2a23; k6=2a13; k7=2a14; k8=2a24;
k9=2a34; ki=a44. (i=1, 2, 3)
При радиально-скоростном методе навигационную функцию получают измерением доплеровской частоты. При этом уравнение сферы (Фиг.1) в инерциальной системе координат дифференцируют по времени

Xc, Yc, Zc - координаты навигационного спутника; X, Y, Z - искомые координаты объекта; 






После подстановки (5) в (4) получаем уравнение поверхности для радиально-скоростного метода












Поверхность, представленная данным уравнением (6), является конусом с вершиной в точке С. Пересечение его с поверхностью шара является сферической гиперболой. Следовательно, для того чтобы определить положение объекта радиально-скоростным методом в трехмерном пространстве, надо измерить не менее трех величин 

где коэффициенты ki - определяются аналогично (3).
Однако низкий уровень сигнала у потребителя, а также необходимость нахождения минимум трех-четырех спутников для определения местоположения объекта, делает применение систем спутниковой навигации не всегда возможным.
Таким образом, несмотря на высокие показатели качества спутниковых систем радионавигации, они не могут и не предназначены для того, чтобы полностью исключить из состава аппаратуры обслуживаемого объекта автономные системы.
Близким по технической сущности к предлагаемому изобретению является навигационное устройство, представляющее собою корреляционно-экстремальную систему, использующую метод навигации посредством сравнения профилей рельефа местности TERCOM [3] (Патент US 7522090). В этой системе измеряемый в процессе полета профиль рельефа местности сравнивается с хранящимся в бортовой вычислительной системе эталонной цифровой картой рельефа местности. Текущий профиль рельефа местности измеряется вдоль истинной траектории полета ЛА на основе вычисления разности двух высот - барометрической Нб и измеряемой с помощью радиовысотомера Нр. Данная система обладает высокой помехоустойчивостью, простотой реализации и надежностью. Одним из недостатков данной системы является ее ограниченная информативность, связанная с тем, что текущая информация снимается в «точке».
При этом существует возможность, используя бортовую РЛС ЛА, определять дальность до нескольких точек земной поверхности в разные моменты времени либо, используя РЛС с активной ФАР, определить в один момент дальность до нескольких точек земной поверхности.
Задачей предлагаемого изобретения является расширение функциональных возможностей бортовых РЛС ЛА, повышение надежности и эффективности навигационных систем, обеспечение повышенной степени интегрированности и унификации бортового оборудования.
В предлагаемом устройстве локацию и навигацию возможно обеспечить за счет применения РЛС, которая сравнивает параметры сигнала от поверхности с данными электронных карт местности для осуществления навигации и обнаружения нерадиоконтрастных целей.
Указанный технический результат достигается путем сканирования диаграммы направленности антенны (ДНА) поверхности с определением высоты рельефа местности в нескольких точках либо одновременно, либо в последовательные моменты времени, сравнением с высотами рельефа электронных карт местности, нахождением этих высот и определением их координат, после чего определения собственного местоположения либо разностно-дальномерный методом, либо радиально-скоростным методом.
При реализации разностно-дальномерного метода с помощью гироскопа крена определяются отклонения луча ДНА ϑ, и, с учетом информации о дальности до поверхности, определяются относительные координаты, т.е.
Δ1z=ρ1Sinϑ1=z-z1; Δ1y=ρ1cosϑ1=y-y1.
Аналогично, для второй точки
Δ2z=ρ2sinϑ2=z-z2; Δ2y=ρ2cosϑ2=y-y2.
Исключая z и y, получаем
Δ1z-Δ2z=z2-z1=A3; Δ1y-Δ2y=y2-y1=A2.
Используя электронную карту местности, определяются минимальные значения функции
Кр(х, Δy, Δz)=(RI(x, y, z)-RI(x, y, z+Δz)-Δ1z+Δ2z(RI(x, y, z)-RI(х, y+Δy, z)-Δ1y+Δ2y),
для всех х∈[x0-kΔr; x0+kΔr], z∈[z0-kΔr; z0+kΔr], где x0, z0 - координаты последнего навигационного измерения, kΔr - радиус зоны возможного перемещения ЛА за время, прошедшее с последнего определения координат (k>1), RI - функция поверхности в электронной цифровой карте. Значения х1 и х2, которым соответствует минимальные значения функции Kp(x, y, z), признается истинным. Таким образом, получаем А1=х2-х1, и координаты точек (x1, y1, z1) и (x2, y2, z2). При этом соответствующие координаты проверяются путем проверки существования данной точки, для того чтобы избежать неоднозначности, присущей функции Kp(x, y, z). После определения подобным образом информации о третьей точке (х3, y3, z3), становится возможным применить разностно-дальномерный способ (3), при котором 
Для радиально-скоростного метода возможно упростить выражение (4), (6) и (7) следующим образом.

где Xc, Yc, Zc - координаты точки поверхности; X, Y, Z - искомые координаты объекта; 


ρ=(Xc-X)2+(Yc-Y)2+(Zc-Z)2
После подстановки (5) в (4) получаем уравнение поверхности для радиально-скоростного метода









При помощи гироскопа крена в момент отклонения луча ДНА вертикально вниз, т.е. ϑ=180°, определяется относительная высота в разные моменты времени, т.е.
h1=h(t0),. h2=h(t0+Δt), yh3=h(t0+2Δt) и т.д.
Используя электронную карту местности, определяются минимальные значения функции
Kp(x, y, z)=(RI(x, y, z)-RI(x, y+Δy, z)-h1+h2)(RI(x, y, z)-RI(х, y+2Δy, z)-h1+h3),
для всех х∈[x0-kΔr; x0+kΔr], z∈[z0-kΔr; z0+kΔr], где x0, z0 - координаты последнего навигационного измерения, kΔr - радиус зоны возможного перемещения ЛА за время, прошедшее с последнего определения координат (k>1), RI - функция поверхности в электронной цифровой карте. Значения координат, которым соответствует минимальные значения функции Kp(x, y, z), признается истинным. Таким образом, получаем координаты точек (x1, y1, z1), (x2, y2, z2), (x3, y3, z3). При этом соответствующие координаты проверяются путем проверки существования данных точек на расстояниях r1=VΔt, r2=V2Δt для того, чтобы избежать неоднозначности, присущей функции Kp(x, y, z). После становится возможным применить радиально-скоростной способ (7), при котором 

Отличительными от наиболее близкого аналога признаками являются:
- использование РЛС для решения задач навигации;
- использование гироскопа крена для определения положения луча ДНА;
- дополнительное оснащение РЛС внутренней памятью с электронными цифровыми картами местности.
Новая совокупность конструктивных элементов позволяет, в частности, за счет выполнения:
- РЛС с электронным сканированием диаграммы направленности антенны с фазированной активной решеткой - обеспечить обнаружение и определение параметров радиоконтрастных целей, определение земной поверхности и измерение дальности до нее, а также обнаружение нерадиоконтрастных целей на земной поверхности;
- коррелятора - обеспечить сравнение входных параметров РЛС с данными электронной карты местности и выдать координаты, где функция сравнения приняла наименьшие значения;
- встроенной памяти с электронными картами местности - выдать необходимую информацию из геоинформационной базы данных для сравнения в коррелятор;
- гироскопа крена - определять направление луча ДНА в качестве входного параметра коррелятора.
В результате реализации предлагаемого устройства появляются следующие возможности:
- возможность подключения РЛС к инерциальной навигационной системе, что позволяет реализовать дифференциальный режим работы ИНС;
- возможность интеграции в одном устройстве средства радиолокации и навигации;
- возможность повышения помехозащищенности РЛС в задачах обнаружения и целеуказания.
Сущность изобретения поясняется чертежом на фиг.2.
Устройство локации и навигации состоит из радиолокационной системы, устройства обработки информации и гироскопа крена.
Радиолокационная система 1 позволяет управлять лучом ДНА, а также получать данные дальномерного канала и передавать их вместе с углами отклонения луча ДНА в устройство обработки информации 2.
Устройство обработки информации 2 содержит блок памяти с электронными картами местности 3, коррелятор 4 и предназначено для выдачи управляющих сигналов в РЛС 1, запросов в блок памяти 3 и расчета текущих координат.
Гироскоп крена 5 предназначен для определения и выдачи в устройство обработки информации текущего угла крена устройства локации и навигации и содержит датчик угловой скорости 6, электронное корректирующее устройство 7.
При появлении необходимости в процессе сканирования бортовой РЛС ЛА окружающего пространства определить координаты ЛА, измеряется угол крена гироскопом 5, земная поверхность сканируется ДНА РЛС 1 с определением высоты рельефа местности в нескольких точках либо одновременно, либо в последовательные моменты времени, после чего информация о расстояниях до точек поверхности или скорости их изменения вместе с информацией об угле крена поступает в коррелятор 4 устройства обработки информации 2, где сравнивается с информацией из блока памяти электронных карт местности 3, в результате чего определяются координаты отсканированных точек поверхности, по которым вычисляются координаты ЛА либо разностно-дальномерным методом, либо радиально-скоростным методом.
Предлагаемое изобретение позволит оснастить ЛА бортовой РЛС с возможностями навигации, обеспечивая повышенную степень интегрированности бортового оборудования, повысить надежность и эффективность навигационных систем за счет возможности подключения РЛС к инерциальной навигационной системе, что позволяет реализовать дифференциальный режим работы ИНС, а также обеспечить возможность обнаружения неконтрастных целей на земной поверхности и повышения помехозащищенности РЛС в задачах обнаружения и целеуказания.
СПИСОК ЛИТЕРАТУРЫ
1. Pierce, McKenzie and Woodward, Loran, McGraw-Hill Book Co., Inc., New York, 1950.
2. Чуров Е.П. Спутниковые системы радионавигации. М., «Сов. радио», 1977, 392 с.
3. http://www.google.com/patents/US7522090.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
Изобретение предназначено для решения задач навигации и обнаружения бортовыми системами летательных аппаратов (ЛА) наземных объектов. Достигаемый технический результат изобретения - расширение функциональных возможностей и повышение надежности. Сущность изобретения заключается в том, что в процессе сканирования бортовой радиолокационной системой (РЛС) ЛА окружающего пространства земная поверхность сканируется РЛС с определением высоты рельефа местности в нескольких точках либо одновременно, либо в последовательные моменты времени, после чего информация о расстояниях до точек поверхности или скорости их изменения вместе с информацией об угле крена от гироскопа крена поступает в коррелятор устройства обработки информации, где сравнивается с информацией из блока памяти электронных карт местности, в результате чего определяются координаты отсканированных точек поверхности, по которым вычисляются координаты ЛА либо разностно-дальномерным методом, либо радиально-скоростным методом. 2 ил.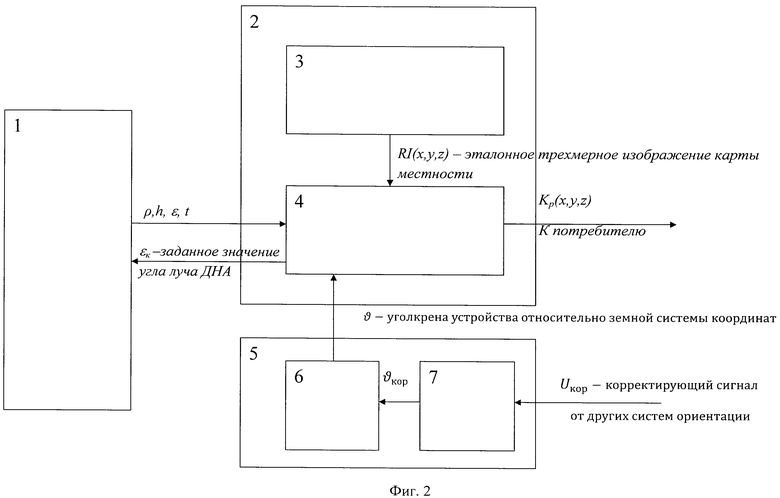
Устройство локации и навигации, содержащее бортовую радиолокационную систему (РЛС) летательного аппарата (ЛА), гироскоп крена и устройство обработки информации, включающее блок памяти с электронными картами местности с коррелятором, отличающееся тем, что РЛС получает управляющие сигналы от коррелятора для задания положения луча РЛС, в процессе сканирования окружающего пространства РЛС измеряется угол крена гироскопом крена, земная поверхность сканируется в режиме определения относительной высоты рельефа местности в нескольких точках постоянно или в последовательные моменты времени, полученная информация о расстояниях до точек поверхности, скорости их изменения, угле крена поступает в коррелятор устройства обработки информации, где сравнивается с информацией из блока памяти электронных карт местности, на основании сравнения определяют те координаты отсканированных точек поверхности, где функция сравнения принимает наименьшие значения, затем в устройство обработки информации передаются координаты данных точек, угол крена, угол положения луча РЛС, данные о моментах времени, после чего в устройстве обработки информации вычисляются координаты ЛА разностно-дальномерным или радиально-скоростным методом и обнаруживаются неконтрастные объекты, отсутствующие в базе данных электронных карт местности.
| US 7522090 B2, 21.04.2009 | |||
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2000 |
|
RU2171499C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ОБШИРНОЙ ТЕРРИТОРИИ | 2002 |
|
RU2217805C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| БОРТОВАЯ СИСТЕМА ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ОБЪЕКТОВ ПРИРОДНО-ТЕХНОГЕННОЙ СФЕРЫ | 2006 |
|
RU2315951C1 |
| US 20080291077 A1, 27.11.2008 | |||
| US 8212714 B1, 03.07.2012 | |||
| СПОСОБ ДУГОВОЙ СВАРКИ В ИНЕРТНЫХ ГАЗАХ СТЫКОВЫХ СОЕДИНЕНИЙ РАЗНОРОДНЫХ АЛЮМИНИЕВЫХ СПЛАВОВ | 2006 |
|
RU2357841C2 |

