Изобретение относится к оптико-механическому приборостроению, в частности к устройствам для обнаружения пространственных объектов и может быть использовано в системах наведения лазерных комплексов.
Известно, что вращение в одну и ту же сторону двух одинаковых оптических клиньев, последовательно установленных по ходу луча, приводит к вращению прошедшего через клинья луча по окружности. Вращение клиньев в разные стороны на одинаковый угол приводит к перемещению в пространстве прошедшего луча по прямой линии, ортогональной оси вращения, причем угол, на который поворачивается прошедший через клинья оптический луч, меньше, чем угол поворота клиньев и связан с ним через коэффициент оптической редукции, зависящий от параметров клиньев [1].
Известен способ управления в пространстве лазерным лучом с помощью двух оптических клиньев, установленных вдоль общей оптической оси, клинья вращаются приводом через шестеренчатую передачу [2]. Привод управляется по программе в пределах цикла, определяемого срабатыванием датчиков взаимного положения клиньев.
Недостатком этого способа является невозможность задания оптимальной для поиска спиральной траектории развертки луча с управляемыми в процессе поиска параметрами спирали и без повторения траектории перемещения луча, поскольку в этом способе отсутствует строгое соответствие между задаваемыми на вход привода воздействиями и формируемой траекторией развертки луча в пространстве. Кроме того, данный способ не предусматривает возможности определения координат обнаруженных при сканировании объектов.
Наиболее близким по технической сущности к предлагаемому способу является способ развертывания лазерного луча, реализованный в устройстве для сканирования пространства лазерным излучением путем раздельного поворота приводами двух одинаковых оптических клиньев, установленных по ходу луча и имеющих возможность вращения с различными скоростями [3]. Этот способ применим в технологических операциях, а также для сканирования пространства при поиске излучающих объектов.
Недостатком способа является невозможность задания оптимальной для поиска спиральной траектории развертки луча с управляемыми в процессе поиска параметрами спирали и без повторения траектории перемещения луча, поскольку в этом способе отсутствует строгое соответствие между задаваемыми на вход приводов воздействиями и формируемой траекторией развертки луча в пространстве. Кроме того, при сканировании по данному способу возможен пропуск отдельных участков сканируемого пространства из-за сложной формы траектории поиска, что приводит к увеличению времени поиска. Недостатком способа при использовании его при поиске пространственных объектов является также то, что способ не раскрывает процедуры определения координат обнаруженных при сканировании пространственных объектов.
Задачей изобретения является создание способа сканирования пространства лазерным лучом и определения координат обнаруженных объектов с повышенными эксплуатационными характеристиками за счет формирования оптимальной траектории развертки луча в пространстве со строго соответствующими задаваемым параметрами траектории и определения координат обнаруженных пространственных объектов через углы поворота клиньев при одновременном повышении энергетического потенциала обнаружения.
Поставленная задача решается тем, что в известном способе развертывания лазерного луча, включающем формирование спиральной развертки луча двумя одинаковыми оптическими клиньями, последовательно установленными по ходу луча, вращающимися с помощью двух приводов, спиральную развертку луча формируют задавая вращение обоих клиньев в одну сторону путем подачи на входы обоих приводов линейно возрастающих угловых задающих воздействий, одновременно задавая вращение тех же клиньев в разные стороны на угол, равный угловому радиусу поля сканирования, умноженному на величину оптической редукции пары клиньев, путем подачи на входы обоих приводов в противофазе дополнительных линейно возрастающих угловых входных воздействий противоположных знаков, при этом синхронизируют внутри каждого цикла начало задания возвратно-поступательного движения луча с нулевыми показаниями датчиков угла поворота клиньев, в процессе развертки луча осуществляют контроль отработки приводами задающих воздействий по датчикам углов поворота клиньев, а координату обнаруженного объекта в поле сканирования сначала определяют в полярных координатах по показаниям датчиков углов, используя соотношения:


где: ρоб и ϕоб - соответственно полярный радиус и полярный угол объекта относительно центра поля сканирования в полярной системе координат; γк1 и γк2 - показания датчиков углов поворота клиньев в момент обнаружения объекта;
i - оптическая редукция пары клиньев при вращении их в разные стороны на одинаковые углы, равная отношению угла поворота клина к углу поворота луча;
Z - целое число оборотов клиньев внутри одного цикла на момент обнаружения объекта,
после чего переводят полярные координаты объекта в координаты в декартовой системе, используя соотношения:


где: Хоб и Yоб - координаты обнаруженного объекта в декартовой системе координат,
параметры формируемой спирали выбирают из соотношений:



где: R - радиус заданного поля сканирования;
N - число витков спирали;
d - угловой диаметр лазерного луча;
tц - время цикла;
Ω. - угол поворота клиньев при возвратно-поступательном перемещении луча;
ω - угловая скорость вращения клиньев в одну сторону.
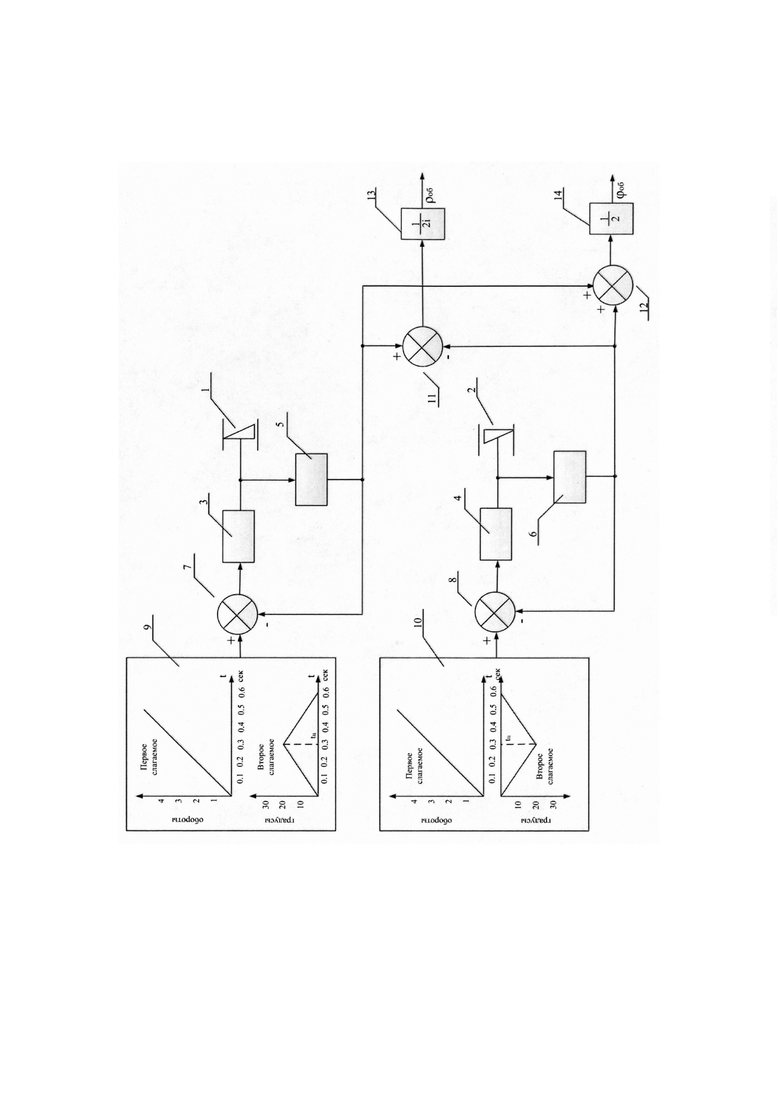
Предлагаемый способ сканирования пространства лазерным лучом и определения координат обнаруженных объектов осуществляется в соответствии со структурной схемой системы сканирования лазерным лучом следующим образом. Для поворота клиньев 1 и 2 используются два безредукторных привода 3 и 4 на базе кольцевых электродвигателей (для каждого клина свой двигатель). Углы поворота клиньев контролируются датчиками углов 5 и 6, в качестве которых могут быть использованы кольцевые датчики, например, индуктосины. Значения углов поворота с выходов датчиков угла подаются на входы дискриминаторов ошибок приводов 7 и 8, на другие входы которых поступают задающие воздействия с задатчиков угла 9 и 10, а разностный сигнал дискриминаторов ошибок подается на входы приводов. Выходы обоих датчиков угла также соединены со входами сумматоров 11 и 12, выходы которых, в свою очередь, соединены со входами вычислителей полярных координат обнаруженных объектов 13 и 14.
Система сканирования пространства лазерным лучом и определения координат обнаруженных объектов в соответствии со структурной схемой работает по предлагаемому способу следующим образом. Каждый привод клина отрабатывает в следящем режиме свое входное воздействие, формируемое в задатчиках угла 9 и 10, замыкаясь по собственным датчикам угла 5 и 6. Входное воздействие, складывается из двух слагаемых - первое слагаемое одинаково для обоих приводов и является линейно возрастающим сигналом, отрабатывая который приводы непрерывно поворачивают клинья в одну сторону, тем самым вращая луч по круговой траектории. Второе слагаемое - тоже линейно возрастающий сигнал, по модулю одинаковый для обоих приводов, но противоположный по знаку для каждого привода. В процессе отработки приводами одновременно с первым второго слагаемого входного воздействия луч, поворачиваясь, смещается по радиусу на угол, в i раз меньший угла поворота клиньев (обычно i=50…100), совершая помимо вращательных возвратно-поступательные перемещения, тем самым увеличивая радиус сканирования внутри одного цикла сканирования, показанного на рисунке структурной схемы, при возрастании по модулю второго слагаемого и уменьшая радиус сканирования в следующем цикле при убывании по модулю второго слагаемого. Таким образом формируется расходящаяся -сходящаяся спиральная развертка, параметры которой однозначно связаны со входными воздействиями, что позволяет избежать пропусков при сканировании пространства и добиться, тем самым, повышения эксплуатационных характеристик. Выбирая параметры задающих воздействий по соотношениям 5…7, можно формировать спираль с нужным числом витков - обычно несколько витков (первое слагаемое задающего воздействия) и нужным полем сканирования - обычно в пределах градуса (второе слагаемое задающего воздействия). Подставляя в соотношение 5 уменьшенное значение диаметра луча d, можно задавать желаемое перекрытие витков в процессе формирования спирали. Значение величины угловой скорости клиньев, входящее в выражение 7, при непрерывном характере излучения лазера выбирается из условия обеспечения времени экспозиции, необходимого для обнаружения объекта. При импульсном излучателе, обладающем достаточной для обнаружения объекта импульсной мощностью, скорость выбирается из условия отсутствия пропусков пространства при вращении: ω=d / Т, где Т -период излучения лазера. Поскольку внутри каждого цикла начало задания возвратно-поступательного движения луча синхронизировано с нулевыми показаниями датчиков угла поворота клиньев, угловые координаты сканирующего луча однозначно определяются углами поворота клиньев. Принимая во внимание, что приводы клиньев являются следящими и замкнутомыми по углу, с высокой степенью точности они повторяют свои входные воздействия, показанные на схеме в задатчиках углов 9 и 10, поэтому в момент обнаружения пространственного объекта по показаниям датчиков углов поворота клиньев можно вычислить координаты объекта. Учитывая форму входных воздействий, при сложении показаний датчиков углов поворота клиньев, как видно из схемы, получается удвоенный угол поворота луча (с учетом количества полных оборотов), а при вычитании показаний датчиков получается удвоенный угол линейного смещения луча, увеличенный в i раз. После выполнения элементарных процедур по соотношениям 1 и 2 в вычислителях 13 и 14 полученные координаты будут являться полярными. Перевод полярных координат обнаруженного объекта в декартовы осуществляется по соотношениям 3 и 4.
Данный способ для определения координат обнаруженных объектов использует показания датчиков углов поворота клиньев, при этом обнаружитель (фотоприемник), входящий в состав лазерного комплекса, может быть одноэлементный (не координатный), поэтому повышается энергетический потенциал устройства благодаря возможности концентрации всего принимаемого сигнала на одной чувствительной площадке приемника. Это упрощает конструкцию системы при повышении энергетического потенциала обнаружения.
Источники информации
1. Мирошников М. М. Теоретические основы оптико- электронных приборов. - Л., Машиностроение, 1977, с. 123-126.
2. Патент РФ 2163790.
3. Патент РФ 107409 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наведения лазерного луча на объект | 2023 |
|
RU2807586C1 |
| Лидарный комплекс | 2016 |
|
RU2650776C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ЛУЧА НА ОБЪЕКТ | 2022 |
|
RU2788943C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2474844C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2494415C2 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| ЛОКАЦИОННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ | 2017 |
|
RU2653158C1 |
Изобретение относится к устройствам для обнаружения пространственных объектов. Способ сканирования пространства лазерным лучом и определения координат обнаруженных объектов, включающий формирование спиральной развертки луча двумя одинаковыми оптическими клиньями, последовательно установленными по ходу луча, вращающимися двумя приводами, спиральную развертку формируют вращением клиньев в одну сторону, подавая на входы приводов линейно возрастающих угловых задающих воздействий, одновременно задавая вращение тех же клиньев в разные стороны на угол, равный угловому радиусу поля сканирования, умноженному на оптическую редукцию пары клиньев, подавая на входы приводов в противофазе дополнительных линейно возрастающих угловых входных воздействий противоположных знаков, синхронизируя в каждом цикле начало задания возвратно-поступательного движения луча с нулевыми показаниями датчиков угла поворота клиньев, при развертке луча контролируют отработку приводами задающих воздействий по датчикам углов поворота клиньев, координату обнаруженного объекта в поле сканирования определяют в полярных координатах по датчикам углов, переводят полярные координаты объекта в координаты в декартовой системе. Технический результат - повышение эксплуатационных характеристик. 1 ил.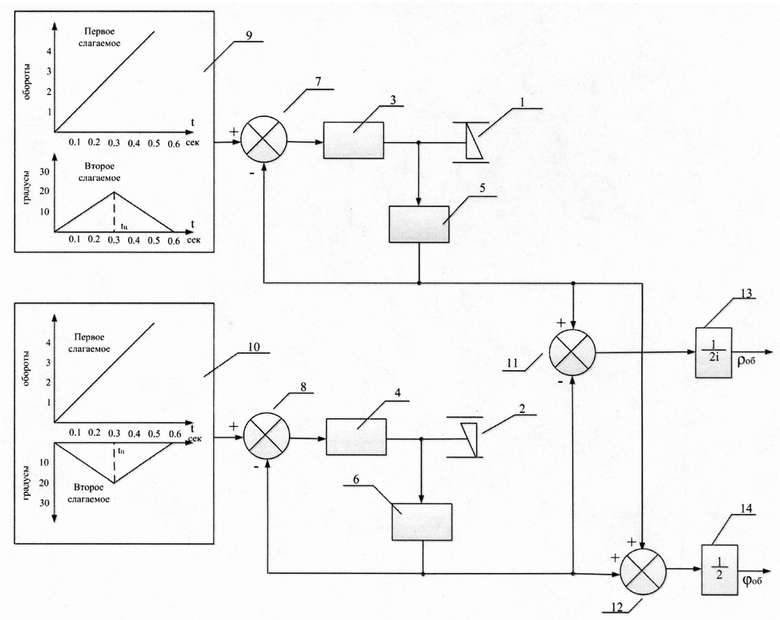
Способ сканирования пространства лазерным лучом и определения координат обнаруженных объектов, включающий формирование спиральной развертки луча двумя одинаковыми оптическими клиньями, последовательно установленными по ходу луча, вращающимися с помощью двух приводов, отличающийся тем, что спиральную развертку луча формируют, задавая вращение обоих клиньев в одну сторону путем подачи на входы обоих приводов линейно возрастающих угловых задающих воздействий, одновременно задавая вращение тех же клиньев в разные стороны на угол, равный угловому радиусу поля сканирования, умноженному на величину оптической редукции пары клиньев, путем подачи на входы обоих приводов в противофазе дополнительных линейно возрастающих угловых входных воздействий противоположных знаков, при этом синхронизируют внутри каждого цикла начало задания возвратно-поступательного движения луча с нулевыми показаниями датчиков угла поворота клиньев, в процессе развертки луча осуществляют контроль отработки приводами задающих воздействий по датчикам углов поворота клиньев, а координату обнаруженного объекта в поле сканирования сначала определяют в полярных координатах по показаниям датчиков углов, используя соотношения:

где: ρоб и ϕоб - соответственно полярный радиус и полярный угол объекта относительно центра поля сканирования в полярной системе координат; γк1 и γк2 - показания датчиков углов поворота клиньев в момент обнаружения объекта;
i - оптическая редукция пары клиньев при вращении их в разные стороны на одинаковые углы, равная отношению угла поворота клина к углу поворота луча;
Z - целое число оборотов клиньев внутри одного цикла на момент обнаружения объекта,
после чего переводят полярные координаты объекта в координаты в декартовой системе, используя соотношения:
Хоб=ρоб cos ϕоб
Yоб=ρоб sin ϕоб,
где: Хоб и Yоб - координаты обнаруженного объекта в декартовой системе координат, параметры формируемой спирали выбирают из соотношений:
N=R/d;
Ω=Ri;
tц=N/ω,
где: R - радиус заданного поля сканирования;
N - число витков спирали;
d - угловой диаметр лазерного луча;
tц - время цикла;
Ω - угол поворота клиньев при возвратно-поступательном перемещении луча;
ω - угловая скорость вращения клиньев в одну сторону.
| Прибор для непосредственного измерения коэффициента формы кривой переменного тока | 1956 |
|
SU107409A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОСТРАНСТВЕННОЙ МОДЕЛИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2679923C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ИНФОРМАТИВНОСТИ И ПРОИЗВОДИТЕЛЬНОСТИ ЛАЗЕРНОГО РАДАРА | 2014 |
|
RU2587100C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| US 8692979 B2, 08.04.2014. | |||

