Область техники.
Изобретение относится к области радиотехники, конкретно - к способам определения в реальном времени оптимальных рабочих частот при ионосферно-пространственном распространении радиоволн (ИПРРВ). Оно может быть применено в радиозондировании, радиопеленгации, радиосвязи, загоризонтной радиолокации (ЗГРЛ) в диапазоне декаметровых (ДКМ) радиоволн. Преимущественно оно может быть использовано в системах ЗГРЛ, работающих в условиях критического воздействия на радиоприем ионосферы, как нестационарной среды распространения радиоволн (РРВ), всевозможных видов активных (АП) и пассивных помех (ПП).
Уровень техники
В настоящее время в загоризонтных радиолокаторах (ЗГ РЛС) для настроек по частоте используются подсистемы адаптации к случайным изменениям гелиогеофизических условий ионосферы (АГФУ). Их работа основана на предположениях о стационарности ИПРРВ и известности законов распределения локационных сигналов (ЛКС), на усредненной/медианной оценке различными методами радиозондирования регулярных (устойчиво наблюдаемых) вариаций ГФУ, отображаемых различными моделями и определяющих выбор приемлемого диапазона рабочих частот [1……3]. Такие модели корректируются в основном по данным анализа сигналов возвратно-наклонного зондирования (ВНЗ), иначе говоря, - сигналов ПП (ВНЗ/ЗС-сигналов), объективно порождаемых в процессе радиолокации зондирующими сигналами (ЗС) вследствие мультипликативного воздействия (МП-воздействия) на распространяющийся ЛКС в процессе «отражения»/«переизлучения»/«рассеяния» (ОПР) радиоволн наземным «пятном засветки/отражения (НПЗО), локальными неоднородностями электронной концентрации (ЛНЭК) ионосферы и прочими объектами/явлениями - источниками МП-воздействий (ИМВ) [2, 4]. Под ЛКС далее будем понимать распространяющийся радиолокационный сигнал (РЛ-сигнал), обусловленный излучением радиопередатчиком (РПД) зондирующего сигнала, в любой точке трасс ИПРРВ, как отраженный от Цели, так и от комплекса других ИМВ. В силу известной нестационарности ИПРРВ применяемые подсистемы АГФУ адекватны лишь частным случаям по условиям функционирования ЗГ РЛС [1, 2, 4, 6]. Под условиями функционирования (УСФ) будем далее понимать общий случай: наличие необходимых для радиолокации технических условий, зависимость ГФУ (и соответственно - ИПРРВ) от географии радиолокационных трасс (РЛ-трасс), стохастические в общем случае условия ОПР радиоволн от условных слоев и ЛНЭК ионосферы с повышенной электронной концентрацией NЭЛ и от НПЗО, наличие на РЛ-трассах упомянутых многообразных порождающих ПП источников мультипликативных воздействий на ЛКС, присутствие на трассах ЗГРЛ любой возможной совокупности Целей, воздействие активных помех (АП) и т. д.
При адаптации ЗГ РЛС по частоте на основе ВНЗ необходимо определять «причины» образования конкретных характеристик ВНЗ-сигналов в их итоговом принятом виде. То есть, решать обратную задачу - определять по характеристикам принятых сигналов ВНЗ исходные радиофизические характеристики (РФХ) комплекса источников МП-воздействий на ЛКС [5, 6, 7, 8]. Однако, быстрые стохастические отклонения ГФУ от применяемых модельных трендов (часто очень глубокие), обусловливающие ошибки выбора приемлемого диапазона рабочих частот и оптимальной рабочей частоты (ОРЧ) по сигналам ВНЗ, в общем по УСФ случае не могут достоверно определяться применяемыми в настоящее время статистическими методами [1, 2, 4, 5, 6]. Традиционно они сводятся к статистическим измерениям характеристик гелиогеофизических условий ионосферы - текущего состояния ее структуры, электронно-ионного содержания, регулярной вариативности с привязкой к географии трасс локации, состояния магнитного поля Земли, параметров сезонно-суточной изменчивости ГФУ и циклов Солнечной активности. При таких сложных УСФ задача текущих оперативных оценок ГФУ и РФХ трасс ИПРРВ по принятым сигналам ВНЗ математически становится не просто обратной, но и некорректно поставленной. Это обусловливает большой статистический разброс оценок параметров ГФУ, неадекватность в общем по УСФ случае моделирования ионосферы, соответственно - неопределенную меру точности определения ОРЧ подсистемой АГФУ [5, 6, 7, 8].
Проблема состоит также в том, что в силу нестационарности ИПРРВ в общем по УСФ случае ЛКС на пути по трассам ИПРРВ может претерпевать в математическом отображении ряд функциональных преобразований, приводящих к переводу принятых сигналов в совершенно иное, чем ожидаемое по форме применяемых ЗС, функциональное пространство [5]. Это несоответствие при излучении РПД штатных ЗС также обусловливает некорректность в таких УСФ постановки обратной задачи измерений необходимых для работы АГФУ характеристик сигналов ВНЗ/ЗС с применением известных традиционных способов статистической обработки принимаемых сигналов [1, 2, 4, 5]. Поэтому в общем случае, как констатировалось выше, работа действующих АГФУ ЗГ РЛС по определению текущей оптимальной рабочей частоты адекватна лишь частным случаям близких к идеальным условиям функционирования [5].
Описанное выше свидетельствует об актуальности решения проблемы оперативного и адекватного определения ОРЧ в условиях нестационарной ионосферы, соответственно - адаптации систем ЗГРЛ по частоте.
Известны способы и устройства, имеющие возможность решения в определенной мере этой проблемы. Их теоретические основы изложены во множестве трудов, например, в [1, 2, 4, 6, 9… 12]. Однако, они посвящены оценке, анализу и моделированию регулярных макроизменений ГФУ ионосферы статистическими методами на достаточно репрезентативных выборках, то есть - относительно инерционны, не соответствуют в достаточной мере РФХ, тонким стохастичным структуре и динамике ионосферы, являющихся источниками нестационарности ИПРРВ и соответственно - нестабильности текущей реальной ОРЧ, как следствие - недостаточной точности ее определения [1, 2, 4]. Фактически отсутствуют способы и аппаратные средства, удовлетворяющие современным требованиям в ЗГРЛ текущих оперативных и адекватных оценок ОРЧ в реальном времени инвариантно к географии, сезонно-суточным-солнечным циклам ГФУ ионосферы, ее динамики и стохастичности. Исходя из сказанного выше и материалов [2, 4, 6, 7, 16, 18, 19] следует, что достаточно оперативное, корректное и адекватное определение в реальном времени текущей ОРЧ по текущим оценкам РФХ ИПРРВ на трассах локации на основе измерений характеристик принятых сигналов ВНЗ возможно только новым способом, обеспечивающим перевод задачи этих измерений в класс математически корректных применительно к построению регуляризованного обнаружителя (РГО) и оценке текущих интервалов относительной стационарности ИПРРВ на РЛ-трассах.
Задача настоящего изобретения - решение проблем адекватности частотной адаптации ЗГ РЛС путем оперативного регуляризованного определения оптимальной рабочей частоты при нестационарном в общем по УСФ случае ионосферно-пространственном распространении радиоволн инвариантно к географии, сезонно-суточным-солнечным циклам ГФУ ионосферы, ее динамики и стохастичности.
Средств и способов решения такой задачи на известном уровне техники не выявлено.
Техническим результатом, обеспечивающим решение сформулированной задачи, является создание нового способа оперативного и адекватного регуляризованного определения текущих значений ОРЧ при нестационарном в общем по УСФ случае ионосферно-пространственном распространении радиоволн инвариантно к географии, сезонно-суточным-солнечным циклам ГФУ ионосферы, ее динамики и стохастичности.
Сущность изобретения.
Достижение заявленного технического результата обеспечивают тем, что осуществляют циклическое с периодом ТΔ возвратно-наклонное зондирование (ВНЗ/ΔД-зондирование) трасс ИПРРВ путем передачи радиопередатчиком (РПД) в начале каждого ТΔi-цикла, перед излучением штатного ЗС, в пределах в текущего интервала Δtст i относительной стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз, относительно длительного по времени, отображаемого Δ-функцией Дирака (приближенно), «пробного» квазимонохроматического сигнала ΔДƒ «включения» (ВНЗ/ΔДƒ-сигнала) длительностью Δtпрƒ, стандартный радиоприем и обработку с учетом локационной задержки соответствующих принятых «пробных» сигналов  , обусловленных передачей сигнала ΔДƒ. В процессе этой обработки осуществляют в начале каждого текущего ТΔi-цикла на интервале Δtпрƒ анализ комплекса их частотных характеристик сигналов
, обусловленных передачей сигнала ΔДƒ. В процессе этой обработки осуществляют в начале каждого текущего ТΔi-цикла на интервале Δtпрƒ анализ комплекса их частотных характеристик сигналов  , затем - формирование их функционального представления-модели
, затем - формирование их функционального представления-модели  . При этом комплекс частотных характеристик сигналов
. При этом комплекс частотных характеристик сигналов  определяют как совокупность их амплитудно-частотных характеристик {Amƒi , ƒmi , σƒ3, σƒ10}ƒ, где: Amƒi - max. амплитуда, ƒmi - частота, соответствующая Amƒi , σƒ3 и σƒ10 - ширина частотного спектра по уровням соответственно -3 дБ и -10 дБ, и доплеровского сдвига ΔƒД в каждом элементе разрешения РЛС. Затем осуществляют генерацию на базе полученной модели необходимого для обработки опорного сигнала (ОПС-i) -
определяют как совокупность их амплитудно-частотных характеристик {Amƒi , ƒmi , σƒ3, σƒ10}ƒ, где: Amƒi - max. амплитуда, ƒmi - частота, соответствующая Amƒi , σƒ3 и σƒ10 - ширина частотного спектра по уровням соответственно -3 дБ и -10 дБ, и доплеровского сдвига ΔƒД в каждом элементе разрешения РЛС. Затем осуществляют генерацию на базе полученной модели необходимого для обработки опорного сигнала (ОПС-i) -  , задержку сигнала ОПС-i на период ТΔ, определение индикатора ΔΨƒ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования функциональных изменений сигналов , отражающих меру соответствия на этом интервале текущей рабочей частоты ƒр прогнозному диапазону Δƒдз. Индикатор ΔΨƒ2 определяют как нормированное функциональное уклонение («невязку») в L2 представления
, задержку сигнала ОПС-i на период ТΔ, определение индикатора ΔΨƒ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования функциональных изменений сигналов , отражающих меру соответствия на этом интервале текущей рабочей частоты ƒр прогнозному диапазону Δƒдз. Индикатор ΔΨƒ2 определяют как нормированное функциональное уклонение («невязку») в L2 представления  пробного сигнала, принятого в начале (i+j)-го цикла, от его относительного эталона - задержанного на период ТΔ опорного сигнала ОПС-i. Причем опорный сигнал
пробного сигнала, принятого в начале (i+j)-го цикла, от его относительного эталона - задержанного на период ТΔ опорного сигнала ОПС-i. Причем опорный сигнал  на первом-стартовом шаге ВНЗ/ΔДƒ-зондирования формируют априори моделированием функциональных преобразований ВНЗ/ΔДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных. Далее проводят расчет минимума-экстремума
на первом-стартовом шаге ВНЗ/ΔДƒ-зондирования формируют априори моделированием функциональных преобразований ВНЗ/ΔДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных. Далее проводят расчет минимума-экстремума  , его сопоставление с получаемыми с выхода основного тракта обнаружения ЗГ РЛС текущими оценками
, его сопоставление с получаемыми с выхода основного тракта обнаружения ЗГ РЛС текущими оценками  совокупных погрешностей измерений (СВПИ) принимаемых сигналов и определение в начале каждого ТΔi-цикла регуляризованного пределами текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона ∆ƒдз текущего значения ОРЧ, удовлетворяющего критерию
совокупных погрешностей измерений (СВПИ) принимаемых сигналов и определение в начале каждого ТΔi-цикла регуляризованного пределами текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона ∆ƒдз текущего значения ОРЧ, удовлетворяющего критерию  непревышения на интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования минимумом-экстремумом пределов СВПИ.
непревышения на интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования минимумом-экстремумом пределов СВПИ.
Обоснование достижения заявленного технического результата
Как уже было констатировано выше, в связи с нестационарностью ионосферы в общем случае, как следствие - математической некорректностью и неадекватностью при сложных УСФ существующих алгоритмов настройки по частоте ЗГ РЛС по сигналам ВНЗ, существующие подсистемы АГФУ обладают соответственно низкой эффективностью. Для обеспечения адаптации ЗГ РЛС по частоте при ВНЗ-зондировании необходим перевод решения обратной задачи определения конкретных характеристик ВНЗ/ЗС-сигналов в их итоговом принятом виде в класс математической корректности [5, 6, 7, 8]. Для этого при измерениях характеристик ВНЗ/ЗС-сигналов в пределах обычного прогнозного частотного диапазона Δƒдз = ƒМПЧ - ƒНПЧ (максимальная применимая - наименьшая применимая частота) на интервале Δtстi относительной стационарности ИПРРВ необходимо использовать специальные сигналы, обладающие свойствами ΔД-функции Дирака. В рамках заявляемого способа предложено циклическое с периодом ТΔ сканирование радиолокационных трасс путем ВНЗ/ΔД-зондирования, заключающегося в излучении РПД, в пределах текущего интервала Δtст i стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз, в начале каждого ТΔi-цикла относительно длительных по времени квазимонохроматических сигналов ΔДƒ «включения», отображаемых Δ-функцией Дирака (приближенно), длительностью Δtпрƒ << ТΔ . Период ТΔ не должен превышать наименьшие из известных корректных расчетных и/или экспериментальных данных (ЭКД) о минимальной длительности Δtст min ≈ 3…5 сек. текущего интервала стационарности каналов ИПРРВ [2, 4, 9…17 и др.]. Учитывая, что длительность Δtпрƒ относительно мала, флуктуации по частоте, задержке, углам прихода принимаемых сигналов можно на этом интервале считать стационарными и взаимосвязанными. Тогда, с учетом реальной производительности вычислительных средств, адекватным способом определения ОРЧ на этом интервале в пределах текущего интервала Δtст i стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз в заданном объеме контроля РЛС может быть локальное одномерное - по частоте - решение задачи регуляризованного поиска текущего значения оптимальной рабочей частоты. Соответственно предложено указанное выше ВНЗ/ΔДƒ-зондирование РЛ-трасс в начале каждого ТΔi-цикла сигналом «включения» ΔДƒ длительностью Δt пр ƒ ≈ tпр ƒ + ТΔ /k ск с параметрами, обоснованными и подробно описанными в [26]:

где tпр ƒ - момент включения квазигармонического сигнала ΔДƒ;
kск - оперативно задаваемая скважность ВНЗ/ΔД-зондирования c периодом ТΔ.
Длительность ΔДƒ-сигнала для приближения к Δ-функции Дирака и получения близких к адекватным оценок параметров принимаемых ΔДƒ-сигналов должна соответствовать требованиям:
Δtстmin>> Δt пр ƒ >> ТП = 1/ FП >> τЗС,
где ТП и FП - период и частота повторения ЗС, τЗС - длительность импульса ЗС.
Важно отметить, что, подобно генезису обусловленных излучением штатных
ЗС пассивных помех -  , в процессе ВНЗ/ΔД-зондирования происходит аутентичное порождение ΔД-модифицированных пассивных помех
, в процессе ВНЗ/ΔД-зондирования происходит аутентичное порождение ΔД-модифицированных пассивных помех  как результат идентичных воздействий на рабочий штатный ЛКС и на ΔД-сигнал комплекса всех ИМВ на трассе. [2, 4, 5, 12, 13]. Логический вывод: характеристики вариативности ПП в обоих случаях должны быть одинаковы. А так как их определение на основе анализа статистическими методами, как обосновано выше, в общем случае некорректно и неадекватно, процессы формирования ПП, как составляющей принимаемого сигнала
как результат идентичных воздействий на рабочий штатный ЛКС и на ΔД-сигнал комплекса всех ИМВ на трассе. [2, 4, 5, 12, 13]. Логический вывод: характеристики вариативности ПП в обоих случаях должны быть одинаковы. А так как их определение на основе анализа статистическими методами, как обосновано выше, в общем случае некорректно и неадекватно, процессы формирования ПП, как составляющей принимаемого сигнала  , функционально можно описывать с помощью представления
, функционально можно описывать с помощью представления  ΔД-модифицированных пассивных помех, обусловленных излучением на интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования «пробного» ΔДƒ-сигнала, то есть, упомянутого выше опорного сигнала ОПС-i - . В соответствии вышеизложенным ОПС-i - модель в ее динамике, корректируемая по данным ВНЗ/ΔДƒ-зондирования, в силу свойств Δ-функции Дирака отображает эквивалентную информацию о комплексе МП-воздействий на трассе, приближающуюся в пределах текущего интервала Δtст i стационарности ИПРРВ к истинной. Именно поэтому она использована в качестве опорного сигнала при обработке принятых ΔДƒ-сигналов (кроме первого цикла ВНЗ/ΔДƒ-зондирования). На первом шаге ВНЗ/ΔДƒ-зондирования, в силу отсутствия при этом инструментальных данных по
ΔД-модифицированных пассивных помех, обусловленных излучением на интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования «пробного» ΔДƒ-сигнала, то есть, упомянутого выше опорного сигнала ОПС-i - . В соответствии вышеизложенным ОПС-i - модель в ее динамике, корректируемая по данным ВНЗ/ΔДƒ-зондирования, в силу свойств Δ-функции Дирака отображает эквивалентную информацию о комплексе МП-воздействий на трассе, приближающуюся в пределах текущего интервала Δtст i стационарности ИПРРВ к истинной. Именно поэтому она использована в качестве опорного сигнала при обработке принятых ΔДƒ-сигналов (кроме первого цикла ВНЗ/ΔДƒ-зондирования). На первом шаге ВНЗ/ΔДƒ-зондирования, в силу отсутствия при этом инструментальных данных по  , будет применяться модель
, будет применяться модель  функциональных преобразований ΔДƒ-сигналов на трассе, формируемая на основе исходных моделей (ИСМ) радиофизических характеристик (РФХ) источников МП-воздействий по корректным ЭКД [2, 4, 5, 8, 9…13]. Таким образом, ВНЗ/ΔД-зондирование в описанном виде обеспечивает получение данных для математически корректного решения задачи определения характеристик ВНЗ-сигналов, необходимых для адекватной оценки ОРЧ и требований к частотной адаптации ЗГ РЛС [2, 4, 5, 7…13]. Отсюда следует, что корректным и адекватным способом определения текущих значений ОРЧ в оговоренных условиях должно быть регуляризованное решение, удовлетворяющее критерию непревышения пределов совокупных погрешностей измерений
функциональных преобразований ΔДƒ-сигналов на трассе, формируемая на основе исходных моделей (ИСМ) радиофизических характеристик (РФХ) источников МП-воздействий по корректным ЭКД [2, 4, 5, 8, 9…13]. Таким образом, ВНЗ/ΔД-зондирование в описанном виде обеспечивает получение данных для математически корректного решения задачи определения характеристик ВНЗ-сигналов, необходимых для адекватной оценки ОРЧ и требований к частотной адаптации ЗГ РЛС [2, 4, 5, 7…13]. Отсюда следует, что корректным и адекватным способом определения текущих значений ОРЧ в оговоренных условиях должно быть регуляризованное решение, удовлетворяющее критерию непревышения пределов совокупных погрешностей измерений  принимаемых сигналов (h-систематических,
принимаемых сигналов (h-систематических,  -случайных) минимумом-экстремумом индикатора ΔΨ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования функциональных изменений сигналов , эквивалентных мере соответствия текущей рабочей частоты ƒр прогнозному диапазону ∆ƒдз. Индикатор ΔΨ2 определяется в L2 как нормированное функциональное уклонение («невязка») представления принятого в начале (i+j)-го цикла ВНЗ/ΔД-зондирования пробного сигнала от его относительного эталона - задержанного на период ТΔ опорного сигнала , сформированного на основе данных о представлении
-случайных) минимумом-экстремумом индикатора ΔΨ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования функциональных изменений сигналов , эквивалентных мере соответствия текущей рабочей частоты ƒр прогнозному диапазону ∆ƒдз. Индикатор ΔΨ2 определяется в L2 как нормированное функциональное уклонение («невязка») представления принятого в начале (i+j)-го цикла ВНЗ/ΔД-зондирования пробного сигнала от его относительного эталона - задержанного на период ТΔ опорного сигнала , сформированного на основе данных о представлении
Приближенность параметров используемых ΔД - сигналов к функции Дирака нивелируется применением принципа относительности оценок индикатора ΔΨƒ2 соответствия текущих частот зондирования на интервале Δtпрƒ прогнозному диапазону частот ∆ƒдз, основанного при соотношении
ТП =Δtпрƒ ТΔ на адекватности допущении о неизменности параметров принятых сигналов на интервале следующих друг за другом относительно коротких циклов ВНЗ/ΔДƒ-зондирования. Этот принцип заключается в использовании задержанного на ТΔ представления ОПС-i - , сформированного на основе выборки i-го принятого ΔДƒ-сигнала, в качестве ОПС для вычисления его функциональной нормированной невязки ΔΨƒ2 с представлением принятого сигнала в следующем (i+j)-м цикле ВНЗ/ΔДƒ-зондирования. К тому же такой способ формирования ОПС позволяет в значительной мере избавиться от возможных ошибок моделирования ОПС-1.
ТΔ на адекватности допущении о неизменности параметров принятых сигналов на интервале следующих друг за другом относительно коротких циклов ВНЗ/ΔДƒ-зондирования. Этот принцип заключается в использовании задержанного на ТΔ представления ОПС-i - , сформированного на основе выборки i-го принятого ΔДƒ-сигнала, в качестве ОПС для вычисления его функциональной нормированной невязки ΔΨƒ2 с представлением принятого сигнала в следующем (i+j)-м цикле ВНЗ/ΔДƒ-зондирования. К тому же такой способ формирования ОПС позволяет в значительной мере избавиться от возможных ошибок моделирования ОПС-1.
Невязка ΔΨƒ2 в соответствии с принципами регуляризации по априорным данным решений некорректных задач может рассматриваться как первичный индикатор соответствия «прицеливания» ЗГ РЛС по частоте пределам ∆ƒдз. Следовательно, чем точнее подсистемой АГФУ определен прогнозный диапазон ∆ƒдз, тем эффективнее заявляемый способ [7, 19].
Заявляемый способ на 1-м шаге ВНЗ/ΔД-зондирования алгоритмически может быть представлен в виде:
где  - принятый ΔДƒ-сигнал «включения» на первом (i=1)-м шаге ВНЗ/ΔДƒ - зондирования;
- принятый ΔДƒ-сигнал «включения» на первом (i=1)-м шаге ВНЗ/ΔДƒ - зондирования;
 - ОПС-1 для обработки ВНЗ/ΔД ƒ - сигнала на первом (i = 1)-м шаге ВНЗ/ΔД ƒ - зондирования, генерируемый по (2).
- ОПС-1 для обработки ВНЗ/ΔД ƒ - сигнала на первом (i = 1)-м шаге ВНЗ/ΔД ƒ - зондирования, генерируемый по (2).
Соответственно описанному выше принципу относительности ОПС на (i+j)-м шаге ВНЗ/ΔДƒ-зондирования генерируется как относительный к ОПС-i, сформированному на предыдущем i-м шаге, а способ определения ОРЧ по итогам любого (i+j)-го, следующего после i -го, шага ВНЗ/ΔДƒ - зондирования представлен в виде:
В соответствии с вышеизложенным заявляемый способ позволяет преодолеть отмеченные недостатки статистических способов и устройств оценки ОРЧ, в силу описанных выше свойств применяемых ΔДƒ-сигналов ВНЗ/ΔД-зондирования и перевода задачи текущих скользяще-относительных оценок индикатора ΔΨ2 относительных функциональных изменений принятых сигналов в класс корректности в пределах СПВИ, - достичь, заявленного технического результата: оперативного и адекватного регуляризованного определения текущих значений ОРЧ при нестационарном в общем по УСФ случае ИПРРВ, как следствие, - повышения эффективности систем адаптации ЗГ РЛС по частоте.
Ссылка на чертежи
Сущность изобретения поясняется фиг. 1 - блок-схемой алгоритма заявляемого способа.
На фиг. 1 номерами позиций обозначены следующие операции, отображающие описанные выше действия с учетом локационной задержки:
Операция 1. Выделение последовательно, с синхронизацией сигналами генерации циклов ТΔi ВНЗ/ΔДƒ-зондирования по итогам операции 10 и исходными «пробными» сигналами ΔДƒ по итогам операции 11, принятых стандартным радиоприемником в начале каждого i-го ТΔi-цикла «пробных» сигналов «включения»  , как исходных данных (ИД) для выполнения операции 2, затем - сигналов
, как исходных данных (ИД) для выполнения операции 2, затем - сигналов  , обусловленных передачей штатного зондирующего сигнала (ЗС), как ИД для обработки (операция 12) локационного сигнала (ЛКС). Далее аутентично в начале каждого следующего (i+j)-го цикла выделяют принятые сигналы
, обусловленных передачей штатного зондирующего сигнала (ЗС), как ИД для обработки (операция 12) локационного сигнала (ЛКС). Далее аутентично в начале каждого следующего (i+j)-го цикла выделяют принятые сигналы  и ;
и ;
Операция 2. Анализ, синхронизируемый сигналами генерации циклов ВНЗ/ΔДƒ-зондирования по итогам операции 10, в начале каждого текущего ТΔi-цикла на интервале Δtпрƒ комплекса частотных характеристик принятых «пробных» квазимонохроматических сигналов «включения» длительностью Δtпр ƒ;
Операция 3. Формирование функционального представления-модели принятых сигналов , синхронизируемое сигналами генерации циклов ВНЗ/ΔДƒ-зондирования по итогам операции 10;
Операция 4. Генерация необходимого для обработки опорного сигнала
(ОПС-i) - ;
Операция 5. Задержка сигнала ОПС-i на период ТΔ ;
Операция 6. Формирование опорного сигнала на первом-стартовом шаге ВНЗ/ΔДƒ-зондирования моделированием функциональных преобразований ВНЗ/ΔДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных;
Операция 7. Определение индикатора ΔΨƒ2, относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔДƒ-зондирования функциональных изменений принятых сигналов , как нормированного функционального уклонения («невязки») в L2 представления пробного сигнала, принятого в начале (i+j)-го цикла, от его относительного эталона - задержанного по операции 5 на период ТΔ опорного сигнала ОПС-i - ;
Операция 8. Расчет минимума-экстремума  ;
;
Операция 9. Сопоставление с текущими оценками совокупных погрешностей измерений (СВПИ) принимаемых сигналов, получаемыми в итоге операции 12, и определение в начале каждого ТΔi-цикла, регуляризованного пределами текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона ∆ƒдз, текущего значения ОРЧ, удовлетворяющего критерию  ;
;
Операция 10. Генерация циклов ВНЗ/ΔДƒ-зондирования;
Операция 11. Генерация «пробных» ΔД-сигналов;
Операция 12. Обработка ЛКС, определение СВПИ.
Раскрытие сущности изобретения
Согласно фиг. 1 регуляризованное определение оптимальной рабочей частоты при ионосферно-пространственном распространении радиоволн состоит в следующем.
Необходимое для решения задачи заявляемого изобретения циклическое с периодом ТΔ возвратно-наклонное зондирование трасс ИПРРВ осуществляют путем радиопередачи в начале каждого ТΔi-цикла, перед излучением штатного ЗС, в пределах текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона ∆ƒдз, относительно длительного по времени «пробного» квазимонохроматического ΔДƒ-сигнала «включения» (ВНЗ/ΔДƒ-сигнала) длительностью Δtпрƒ, отображаемого функцией Дирака (приближенно). В процессе обработки, с учетом локационной задержки, принятых сигналов в ходе операции 1 последовательно выделяют, с синхронизацией сигналами генерации циклов ВНЗ/ΔДƒ-зондирования по итогам операции 10 и исходными «пробными» сигналами ΔДƒ по итогам операции 11, принятые стандартным радиоприемником в начале каждого i-го ТΔi-цикла соответствующие «пробные» сигналы «включения» , затем - сигналы , обусловленные передачей штатного зондирующего сигнала (ЗС), как исходные данные (ИД) для выполнения операции 12 - обработки локационного сигнала (ЛКС). Вслед затем аутентично в начале каждого следующего (i+j)-го цикла вновь последовательно выделяют принятые «пробные» сигналы и . Принятые сигналы используют как исходные данные для операции 2 - анализа на интервале ТΔi-цикла комплекса их частотных характеристик: совокупности амплитудно-частотных характеристик {Amƒi, ƒmi , σƒ3, σƒ10}ƒ , где: Amƒi- max. амплитуда, ƒmi - частота, соответствующая Amƒi, σƒ3 и σƒ10 - ширина частотного спектра по уровням соответственно -3 дБ и -10 дБ, и доплеровского сдвига ΔƒД в каждом элементе разрешения РЛС. Результаты этого анализа используют для выполнения операции 3 - формирования функционального представления-модели принятого сигнала . Операции 2 и 3 также синхронизируют генерируемыми в ходе операции 10 сигналами циклов ТΔi. Модель далее применяют в ходе последовательности операций 4, 5, 7: соответственно - генерации необходимого для обработки опорного сигнала (ОПС-i) - , задержки ОПС-i на период ТΔ , определения индикатора ΔΨƒ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/ΔД-зондирования функциональных изменений сигналов . При этом, в связи с отсутствием на первом-стартовом шаге ВНЗ/ΔДƒ-зондирования инструментальных данных о частотных характеристиках принятых сигналов , стартовый опорный сигнал ОПС-1 - , необходимый для проведения на этом шаге
операции 4, формируют в ходе операции 6 априори моделированием функциональных преобразований ВНЗ/ΔДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных. А априорные данные по прогнозному диапазону ∆ƒдз, регуляризующие определение операцией 7 индикатора ΔΨƒ2 , получают с выхода алгоритма АГФУ ЗГ РЛС.
Индикатор ΔΨƒ2 операцией 7 определяют как нормированную функциональное уклонение («невязку») в L2 представления сигнала, принятого в начале (i+j)-го цикла в итоге операции 1, от его относительного эталона - задержанного на ТΔ в итоге операции 5 опорного сигнала ОПС-i , что обеспечивает далее относительность и адекватность текущих оценок ОРЧ от цикла к циклу ВНЗ/ΔДƒ-зондирования. Далее проводят операцию-расчет 8 минимума-экстремума  , сопоставление его операцией 9 с текущими оценками совокупных погрешностей измерений (СВПИ) принимаемых сигналов, получаемыми в
, сопоставление его операцией 9 с текущими оценками совокупных погрешностей измерений (СВПИ) принимаемых сигналов, получаемыми в
процессе 12 обнаружения целей, и определение текущего на интервале от
i-го до (i + j)-го цикла ВНЗ/ΔД-зондирования значения оптимальной рабочей частоты, регуляризованного пределами текущего интервала Δtстi и диапазона ∆ƒдз;
Промышленная применимость
Заявляемый способ, в силу свойств используемых ΔД-сигналов ВНЗ/ΔД-зондирования, позволяет перевести обратную задачу определения характеристик сигналов ВНЗ в класс корректных, соответственно - получать близкие к адекватным текущие оценки РФХ комплекса источников мультипликативных воздействий (ИМВ) на ЛКС. Это, в свою очередь, определяет описанные выше возможности адекватных скользяще-относительных регуляризованных оценок в реальном времени текущих значений ОРЧ. Реализация заявляемого способа позволяет преодолеть недостатки известных статистических методов определения ОРЧ, тем самым - обеспечить корректную текущую частотную адаптацию ЗГ РЛС к нестационарному ИПРРВ.
Основными факторами, определяющими преимущества заявляемого способа перед известными, являются:
- адекватность и оперативность текущих оценок ОРЧ, их независимость от нестационарности ионосферы, географии трасс ЗГРЛ и их направлений;
- инвариантность получаемых текущих оценок ОРЧ применительно к методам обработки сигналов в ЗГ РЛС;
- отсутствие большинства применяемых априори условий и допущений (в различных комбинациях), делающих известные способы оценок ОРЧ статистическими методами в общем по УСФ случае не адекватными.
Определение ОРЧ заявляемым способом проверялось численным экспериментом с применением модели принятого сигнала, задаваемого с огибающей по нормальному закону с произвольными вариациями тренда амплитуд, при длительности «пробного» ΔДƒ-сигнала Δtпрƒ= 2 и 3 сек., периоде ВНЗ/ΔД-зондирования ТΔ = 10 и 15 сек. Получены результаты оценок ОРЧ с ошибками не более 8 %.
Использованные источники информации
1. Левин Б.Р. Статистическая радиотехника. - М.: Советское радио, 1966.
2. Под ред. Колосова А.А. Основы загоризонтной радиолокации .- М.: Радио и связь, 1984.
3. Алебастров В.А., Борсоев В.А., Шустов Э.И. Развитие отечественной загоризонтной радиолокации. М.: Новое время, 2016.
4. Акимов В.Ф., Калинин Ю.К. Введение в проектирование ионосферных загоризонтных радиолокаторов. Под ред. Боева С.Ф. М.: Техносфера, 2017.
5. Джузеппе А. Фабрицио. Высокочастотный загоризонтный радар: основополагающие принципы, обработка сигналов и практическое применение. Пер. с англ. под ред. Боева С.Ф. М., «Техносфера», 2018.
6. Миддлтон Д. Введение в статистическую теорию связи. (An Introduction to Statistical Communication Thtory). Перевод с англ. под ред. Б.Р. Левина. М., «Советское радио», т. 1, 1961, т. 2, 1962.
7. Price R., Green P.E. A communication technique for multipatch channels. PIRE, v.46, № 3, 1958.
8. Исимару А. Распространение и рассеяние волн в случайно-неоднородных средах. М., "Мир", 1981, т, 1, 2.
9. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Обобщенный функциональный анализ информационных радиосистем. Тверь, «Вестник ТвГУ. Серия «Прикладная математика», 2015, № 1.
10. Герасимов Ю.С., Гордеев В.А., Кристаль В.С. Оценка параметров возмущающих воздействий на трассах дальней радиосвязи. М., "Радиотехника", 1982, № 9.
11. Ван-Трис Г. Теория обнаружения, оценок и модуляции. Пер. с англ. под ред. В.И. Тихонова. М., "Советское радио", 1972.
12. Алебастров В.А., Бочкарев Г.С. и др. К вопросу решения обратной задачи ВНЗ на протяженных трассах. В кн. «Распространение радиоволн в ионосфере». М., ИЗМИРАН, 1985.
13. Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Регуляризующие алгоритмы и априорная информация. М., «Наука», 1983.
14. Альперт Я.Л., Гинзбург В.Л., Фейнберг Е.Л. Распространение радиоволн. М., Гостехиздат, 1953.
15. Благовещенский Д.В. Распространение декаметровых радиоволн в высоких широтах. М., "Наука", 1981.
16. Price R., Green P.E. A communication technique for multipatch channels. PIRE, v.46, № 3, 1958.
17. Яковлев О.И., Якубов В.П., Урядов В.П., Павельев А.Г. Распространение радиоволн. М, изд-во URSS, 2015.
18. Вертоградов Г.Г. Комплексные исследования ионосферного распространения декаметровых радиоволн на трассах разной протяженности. Дисс. на соискание степени д-ра физ.-мат. наук. Ростов-на-Дону, 2007, 432 с.
19. Барабашов Б.Г., Вертоградов Г.Г. Динамическая адаптивная структурно - физическая модель декаметрового канала связи. М., «Математическое моделирование», 1996, т. 8, № 2, с. 3-18.
20. Барабашов Б.Г., Вертоградов Г.Г. Определение времени стационарности ионосферного радиоканала. М., «Математическое моделирование», 1996, т. 8, № 2.
21. Вертоградов Г.Г., Урядов В.П., Вертоградов В.Г., Кубатко С.В. Патент RU 2399062, МПК G01S 1/08, 3/46 (2006.01). Ионосферный зонд-радиопеленгатор. Заявл. 15.07.2009. Опубликовано 10.09.2010. Бюлл. № 25, с. 16.
22. Smirnov V.M., Tynyankin S.I., Guzenko O.B. Ionosfernoe Obespechenie Sredstv Korotkovolnovoi Svyazis Ispol’zovaniem Sputnikovykh Navigatsionnykh Sistem GLONASS/GPS [Means Provided by Ionosphere for Short-Wave Communication Using Satellite Navigation Systems GLONASS/GPS]. G. Fryazino: FIRE im. V.A. Kotel’nikova RAN. Moscow, Innovatsionnyi nauchno-tekhnicheskii tsentr, 2012 (in Russian).
23. Rawer K., Bilitza D., Ramakrishnan S. Goals and status of the International Referеnce Ionosphere Rev. Geophys. V. 16. рр. 177-181. 1978.
24. Колмогоров А.Н., Фомин С.В. Элементы теории функций и функционального анализа. М., «Наука» ,1972.
25. Арефьев В.И. и др. Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн. Патент RU 2721622, МПК G01S 13/00 (2006.01), от 27.06.2019, опубл. в ГР РФ 21.05.2020.
26. Арефьев В.И., Богданов О.А., Гордеев В.А., Никонова Л.В., Тихонов В.В. Патент RU 2694235 РФ, МПК G01S 13/04 (2006.01).
27. Способ регуляризованного обнаружения полезных радиосигналов. Заявка RU 2018124726 от 05.07.2018. Госрегистрация в ГРИ РФ от 10.07.2019.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адекватного определения текущих интервалов относительной стационарности ионосферно-пространственного распространения радиоволн | 2022 |
|
RU2786622C1 |
| Способ регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн | 2023 |
|
RU2817867C1 |
| Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн | 2019 |
|
RU2721622C1 |
| Способ регуляризованного обнаружения полезных радиосигналов | 2018 |
|
RU2694235C1 |
| Способ местоопределения источников декаметрового радиоизлучения | 2022 |
|
RU2798776C1 |
| СПОСОБ ВЫБОРА РАБОЧИХ ЧАСТОТ ДЛЯ РАДИОЛИНИЙ ИОНОСФЕРНЫХ ВОЛН | 2006 |
|
RU2307463C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| Способ авиационной адаптивной автоматической декаметровой радиосвязи на незакрепленных частотах | 2016 |
|
RU2622767C1 |
| Способ адаптации декаметровой радиосвязи по ширине спектра передаваемых сигналов | 2022 |
|
RU2796656C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ РАБОЧИХ ЧАСТОТ ИОНОСФЕРНОГО РАДИОКАНАЛА | 2009 |
|
RU2394371C1 |
Изобретение предназначено для решения проблем частотной адаптации систем загоризонтной радиолокации (ЗГРЛ) к нестационарности ионосферы при ионосферно-пространственном распространении радиоволн (ИПРРВ). Техническим результатом является создание способа оперативного определения текущих значений оптимальной рабочей частоты (ОРЧ) при нестационарном в общем по условиям функционирования случае ионосферно-пространственном распространении радиоволн инвариантно к географии, сезонно-суточным-солнечным циклам гелиогеофизических условий ионосферы, её динамике и стохастичности. Заявленный способ осуществляют с применением циклического с периодом  возвратно-наклонного зондирования (ВНЗ/δД-зондирования) трасс ИПРРВ «пробными»
возвратно-наклонного зондирования (ВНЗ/δД-зондирования) трасс ИПРРВ «пробными»  -сигналами (ВНЗ/δДƒ-сигналами), отображаемыми δ-функцией Дирака (приближенно) - квазимонохроматического сигнала «включения» длительностью
-сигналами (ВНЗ/δДƒ-сигналами), отображаемыми δ-функцией Дирака (приближенно) - квазимонохроматического сигнала «включения» длительностью  , их последующего стандартного радиоприема и обработки. Обработку реализуют путем анализа на интервале совокупности частотных характеристик принятых соответствующих «пробных» сигналов
, их последующего стандартного радиоприема и обработки. Обработку реализуют путем анализа на интервале совокупности частотных характеристик принятых соответствующих «пробных» сигналов  , формирования их функционального представления-модели
, формирования их функционального представления-модели  , затем генерации на базе полученных данных необходимого для обработки опорного сигнала (ОПС-i) -
, затем генерации на базе полученных данных необходимого для обработки опорного сигнала (ОПС-i) -  , его задержки на период . В итоге обработки получают данные об индикаторе
, его задержки на период . В итоге обработки получают данные об индикаторе  относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования функциональных изменений сигналов
относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования функциональных изменений сигналов  , отражающих меру соответствия на этом интервале текущей рабочей частоты
, отражающих меру соответствия на этом интервале текущей рабочей частоты  прогнозному диапазону
прогнозному диапазону  . На основе определяют значения ОРЧ, удовлетворяющей критерию непревышения минимумом-экстремумом
. На основе определяют значения ОРЧ, удовлетворяющей критерию непревышения минимумом-экстремумом  пределов совокупных погрешностей измерений
пределов совокупных погрешностей измерений  принимаемых сигналов. 1 з.п. ф-лы, 1 ил.
принимаемых сигналов. 1 з.п. ф-лы, 1 ил.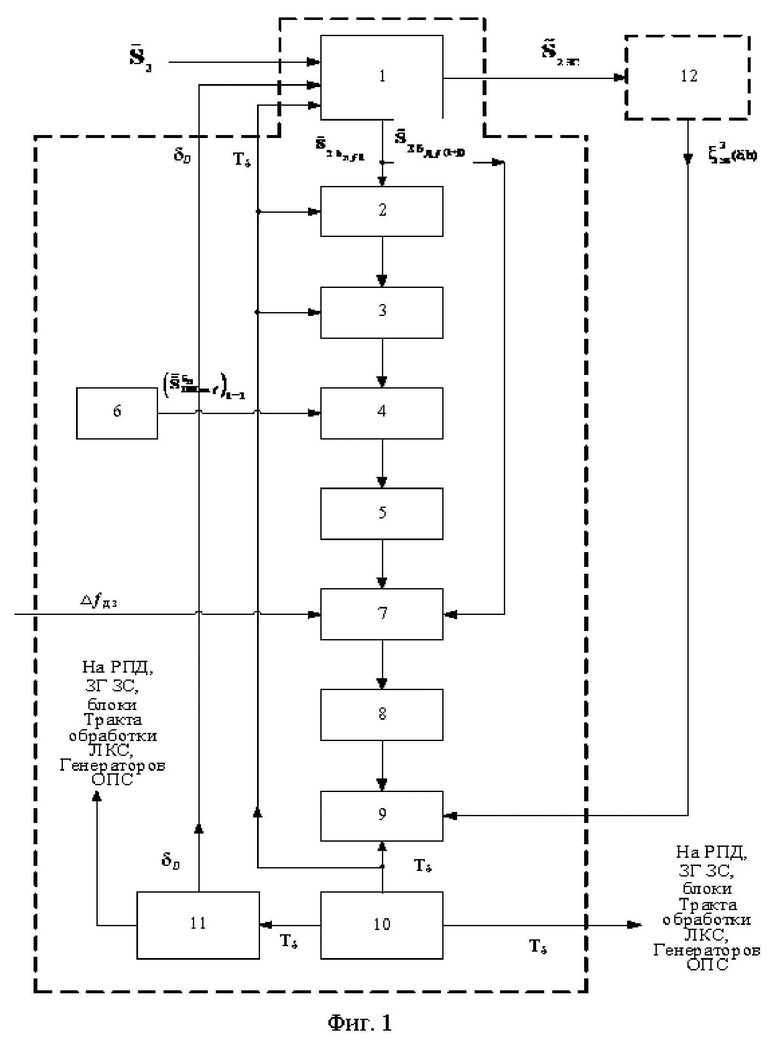
1. Способ определения оптимальной рабочей частоты (ОРЧ) при ионосферно-пространственном распространении радиоволн (ИПРРВ), характеризующийся тем, что осуществляют циклическое с периодом Тδ возвратно-наклонное зондирование (ВНЗ/δД-зондирование) трасс ИПРРВ путем передачи радиопередатчиком (РПД) в начале каждого Tδi-цикла, перед излучением штатного зондирующего сигнала (ЗС), в пределах текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз, относительно длительного по времени, отображаемого δ-функцией Дирака (приближенно) «пробного» квазимонохроматического сигнала δДƒ «включения» (ВНЗ/δДƒ-сигнала) длительностью Δtпрƒ, стандартный радиоприем и обработку, с учетом локационной задержки, соответствующих принятых «пробных» сигналов  , обусловленных передачей сигнала δДƒ, в итоге которой получают данные об индикаторе ΔΨƒ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования функциональных изменений сигналов , отражающих меру соответствия на этом интервале текущей рабочей частоты ƒр прогнозному диапазону Δƒдз, проводят расчет минимума-экстремума
, обусловленных передачей сигнала δДƒ, в итоге которой получают данные об индикаторе ΔΨƒ2 относительных на текущем интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования функциональных изменений сигналов , отражающих меру соответствия на этом интервале текущей рабочей частоты ƒр прогнозному диапазону Δƒдз, проводят расчет минимума-экстремума  , сопоставляют его с получаемыми с выхода основного тракта обнаружения ЗГРЛС текущими оценками
, сопоставляют его с получаемыми с выхода основного тракта обнаружения ЗГРЛС текущими оценками  совокупных погрешностей измерений (СВПИ) принимаемых сигналов и определяют в начале каждого Tδi-цикла регуляризованное пределами текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз текущее значение ОРЧ, удовлетворяющее критерию
совокупных погрешностей измерений (СВПИ) принимаемых сигналов и определяют в начале каждого Tδi-цикла регуляризованное пределами текущего интервала Δtстi относительной стационарности ИПРРВ и прогнозного частотного диапазона Δƒдз текущее значение ОРЧ, удовлетворяющее критерию  непревышения на интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования минимумом-экстремумом пределов СВПИ, причем в процессе обработки принятых «пробных» сигналов осуществляют в начале каждого текущего Tδi-цикла на интервале Δtпрƒ анализ комплекса их частотных характеристик ()i, затем – формирование их функционального представления-модели
непревышения на интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования минимумом-экстремумом пределов СВПИ, причем в процессе обработки принятых «пробных» сигналов осуществляют в начале каждого текущего Tδi-цикла на интервале Δtпрƒ анализ комплекса их частотных характеристик ()i, затем – формирование их функционального представления-модели  , последующую генерацию на базе этой модели необходимого для обработки опорного сигнала (ОПС-i) -
, последующую генерацию на базе этой модели необходимого для обработки опорного сигнала (ОПС-i) -  , задержку сигнала ОПС-i на период Тδ, определение индикатора ΔΨƒ2 как нормированного функционального уклонения («невязки») в L2 представления
, задержку сигнала ОПС-i на период Тδ, определение индикатора ΔΨƒ2 как нормированного функционального уклонения («невязки») в L2 представления  пробного сигнала, принятого в начале (i+j)-го цикла, от его относительного эталона - задержанного на период Тδ опорного сигнала ОПС-i, при этом опорный сигнал
пробного сигнала, принятого в начале (i+j)-го цикла, от его относительного эталона - задержанного на период Тδ опорного сигнала ОПС-i, при этом опорный сигнал  на первом стартовом шаге ВНЗ/δДƒ-зондирования формируют априори моделированием функциональных преобразований ВНЗ/δДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных.
на первом стартовом шаге ВНЗ/δДƒ-зондирования формируют априори моделированием функциональных преобразований ВНЗ/δДƒ-сигнала на радиолокационных трассах на основе известных корректных экспериментальных данных.
2. Способ по п.1, отличающийся тем, что комплекс частотных характеристик сигналов  определяют как совокупность их амплитудно-частотных характеристик {Amƒi, ƒmi, σƒ3, σƒ10}ƒ, где: Amƒi - max. амплитуда, ƒmi - частота, соответствующая Amƒi, σƒ3 и σƒ10 - ширина частотного спектра по уровням соответственно -3 дБ и -10 дБ, и доплеровского сдвига ΔƒД в каждом элементе разрешения РЛС.
определяют как совокупность их амплитудно-частотных характеристик {Amƒi, ƒmi, σƒ3, σƒ10}ƒ, где: Amƒi - max. амплитуда, ƒmi - частота, соответствующая Amƒi, σƒ3 и σƒ10 - ширина частотного спектра по уровням соответственно -3 дБ и -10 дБ, и доплеровского сдвига ΔƒД в каждом элементе разрешения РЛС.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ РАБОЧИХ ЧАСТОТ ИОНОСФЕРНОГО РАДИОКАНАЛА | 2009 |
|
RU2394371C1 |
| Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн | 2019 |
|
RU2721622C1 |
| ИОНОСФЕРНЫЙ ЗОНД-РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2399062C1 |
| Устройство для дистанционного измерения положения колокола мокрого газгольдера | 1954 |
|
SU108145A1 |
| RU 2013157489 A, 27.06.2015 | |||
| ВЕРТОГРАДОВ Г.Г., УРЯДОВ В.П., ВЕРТОГРАДОВА Е.Г | |||
| Аппаратно-программный комплекс для определения оптимальных рабочих частот связной радиолинии по данным наклонного зондирования ионосферы | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Методы и алгоритмы | |||

