Область техники
Изобретение относится к области загоризонтной радиолокации (ЗГРЛ), конкретно к способу регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн. Способ может быть использован в условиях критического воздействия на прием локационных сигналов ионосферы, как нестационарной среды распространения радиоволн (РРВ), всевозможных видов активных (АП) и пассивных помех (ПП).
Уровень техники
Известны применяемые в загоризонтных (ЗГ) радиолокационных станциях (РЛС) в различных модификациях традиционные способы - корреляционный прием (КРП) и согласованная фильтрация (СГФ) - обработки локационных сигналов (ЛКС) и обнаружения полезных радиолокационных сигналов (ПС), содержащих информацию об объектах локации [1-4]. Эти способы основаны на методах статистической радиотехники, на предположениях о стационарности гелиогеофизических условий (ГФУ) в ионосфере (далее кратко - ГФУ) и радиофизических условий (РФУ) ионосферно-пространственного распространения радиоволн (ИПРРВ), на известности законов распределения и функционального представления принимаемых сигналов, на соответствующих традиционных методах адаптации к регулярной и случайной вариативности ГФУ, к мультипликативным воздействиям (МП-воздействиям, МП-помехам) на ЛКС путем усредненной и/или медианной оценки характеристик регулярных (устойчиво наблюдаемых/измеряемых, соответственно - относительно длительных) изменений ГФУ и РФУ. Под локационным сигналом - ЛКС - далее будем понимать радиолокационный сигнал (РЛ-сигнал) в любой точке трасс ЗГ РЛС, обусловленный излучением радиопередатчиком (РПД) зондирующего сигнала (ЗС), как отраженный от Цели, так и от комплекса других объектов/явлений - источников мультипликативных воздействий (ИМВ) на ЛКС.
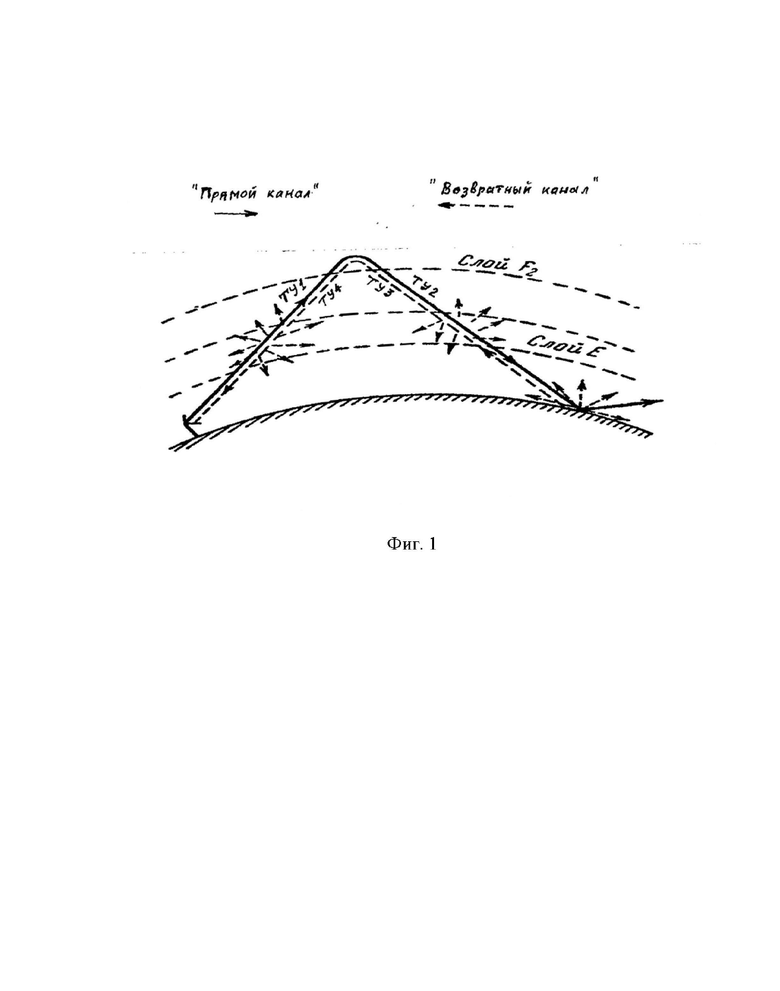
На рисунке фиг. 1 показана в приближении геометрической оптики физическая модель трассы ЗГРЛ с разбиением на условные участки, как наиболее общего случая по условиям ИПРРВ [2, 5 и др.]. Здесь «прямой канал»: РЛС - среда РРВ - Цель, включает первый участок трассы ТУ 1 от РЛС до первой области отражения электромагнитных волн (ЭМВ) в ионосфере и второй участок трассы ТУ 2 от этой области отражения до Цели (при её наличии). «Прямой канал» включает также полный второй участок трассы ТУ 2 (минуя Цель) от первой области отражения до так называемого «наземного пятна засветки/отражения» (НПЗО) радиоволн. «Возвратный канал»: НПЗО - среда РРВ - РЛС, включает обратный третий участок трассы ТУ 3 от НПЗО до второй области отражения ЭМВ в ионосфере, четвертый участок трассы ТУ 4 от этой области отражения до РЛС. Области отражения ЭМВ в ионосфере идентифицированы как первая и вторая в силу того, что могут быть различны как по пространственным параметрам, так и по РФХ.
Достаточно часто при сложных условиях функционирования (УСФ) ЗГ РЛС в силу указанных и других допущений известные способы обнаружения ПС, имеют ограниченные возможности решения проблем локационной эффективности.
Под условиями - УСФ - функционирования ЗГ РЛС будем понимать в самом общем случае: наличие необходимых для ЗГРЛ технических средств и алгоритмов; присутствие на трассах ЗГ-локации любой возможной совокупности Целей с переменными характеристиками их пространственно-временного положения и движения; зависящие от геомагнитной ситуации и солнечной активности регулярные и одновременно стохастичные ГФУ в ионосфере - структурно и физически нестационарной, слоисто-неоднородной, образуемой локальными ионосферными электронно-ионными образованиями-неоднородностями различного масштаба с повышенной электронной концентрацией NЭЛ - ЛНЭК, диспергирующей, двоякопреломляющей электромагнитные волны (ЭМВ), дискретно-диффузно рассеивающей ЭМВ среде, обладающей в числе прочих свойствами турбулентности по основным электро-физическим характеристикам (ЭФХ), разнообразной диффузии электронно-ионного содержания; как следствие указанных свойств ионосферы - зависимость ГФУ и ИПРРВ от сезонно-суточной ситуации, от ориентации конкретных радиолокационных трасс (РЛ-трасс) относительно магнитного поля Земли (МПЗ), от состояния МПЗ, от солнечной активности; как следствие указанных свойств ионосферы - относительно «медленные» регулярные и одновременно относительно «быстрые» стохастические изменения радиофизические свойства (РФС) этой среды, обусловливающие отражение/переизлучение/рассеяние (ОПР) радиоволн условными слоями ионосферы и их локальными ЛНЭК; пространственно и радиофизически неопределенное ОПР радиоволн «наземным пятном засветки/отражения» и прочими ИМВ, приводящими к дискретно-диффузной многолучёвости (ДДМЛ) на РЛ-трассах; возможное присутствие на трассах ЗГРЛ объектов/явлений - мультипликативно возмущающих воздействий (ВВ) на ЛКС, не характерных для «невозмущённой» ионосферы (геомагнитные и солнечные «бури», прочие аномальные ситуации по ГФУ, метеорные следы, пролеты самолетов гражданской/военной авиации, ракетные старты, аномально перемещающиеся ЛНЭК - и т.п.), относимых к МП-воздействиям на ЛКС естественного и/или искусственного происхождения; активные помехи (АП) радиоприёму различного вида и происхождения [2, 5, 6, 7, 10 и др.].
Подсистемы адаптации - АГФУ - существующих ЗГ РЛС к указанной в УСФ вариативности ГФУ управляют их настройками на основе знаний о регулярных на относительно больших интервалах времени сезонно-суточных текущих изменениях ГФУ, получаемых путем статистических измерений, без учета относительно «быстрых» (и часто очень глубоких) изменений тонкой стохастичной структуры и динамики ионосферы, её радиофизических характеристик (РФХ), являющихся основными источниками проявления нестационарности ИПРРВ [1, 2, 6…12]. Такие стохастические отклонения ГФУ от применяемых в АГФУ модельных трендов регулярных изменений ГФУ в общем случае не могут достаточно точно и оперативно определяться применяемыми статистическими методами из-за их относительной инерционности [1, 2, 6…12]. Модели ГФУ, как правило, корректируют по данным статистического анализа ПП - объективно порождаемых в процессе радиолокации сигналов возвратно-наклонного зондирования (ВНЗ), источниками которых является комплекс объектов/явлений на трассах локации (в основном НПЗО) и другие ИМВ [1, 2, 8, 9… и др.]. Применяемые алгоритмы АГФУ приемлемо эффективны только при уникальных ГФУ на РЛ-трассах, характерных для среднеширотной «спокойной»/регулярной ионосферы, модель которой заложена в алгоритмы подсистемы адаптации.
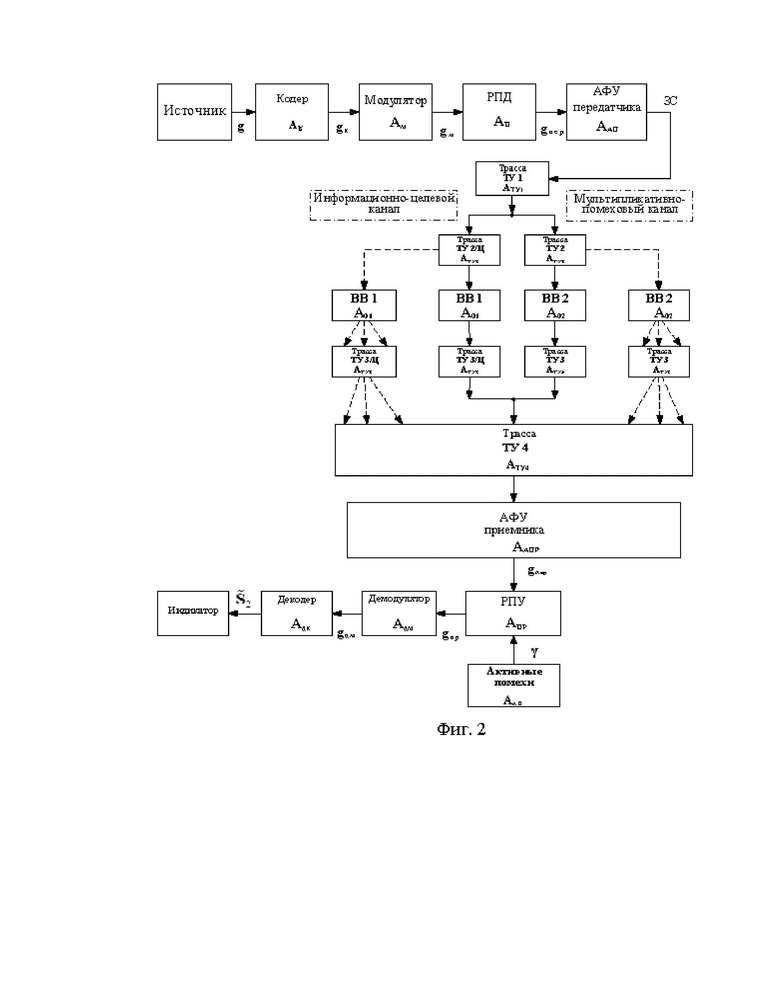
Кроме того, при указанных УСФ наблюдаются, как показано в [ст. 6, 7, 10] при функциональном анализе показанной на фиг. 2 обобщенной структурно-физической модели (СФМ) информационных радиосистем (ИРС), в общем случае многократные необратимые функциональные преобразования ЛКС на РЛ-трассах, приводящие к переводу принимаемого сигнала в совершенно иное функциональное пространство по отношению к его ожидаемому «облику» - «замаскированному» помехами зондирующему сигналу.
Поэтому при использовании в ЗГРЛ при нестационарном ИПРРВ традиционных для надгоризонтной радиолокации (НГРЛ) методов КРП/СГФ при обработке сигналов достаточно часто наблюдается неприемлемое отклонение оценок параметров обнаруженной Цели от априори известных/оправданно ожидаемых, то есть, фиксируются произвольно большие потери ΔI2 полезной информации. Или констатируется невозможность обнаружения, выделения полезных сигналов [2, 6, 7, 10, 11, 12]. Это подтверждается практикой работы ЗГ РЛС [2, 6, 10, 11, 12] и свидетельствует об актуальности при ЗГРЛ разработки способов и алгоритмов обнаружения, инвариантных относительно нестационарности ИПРРВ.
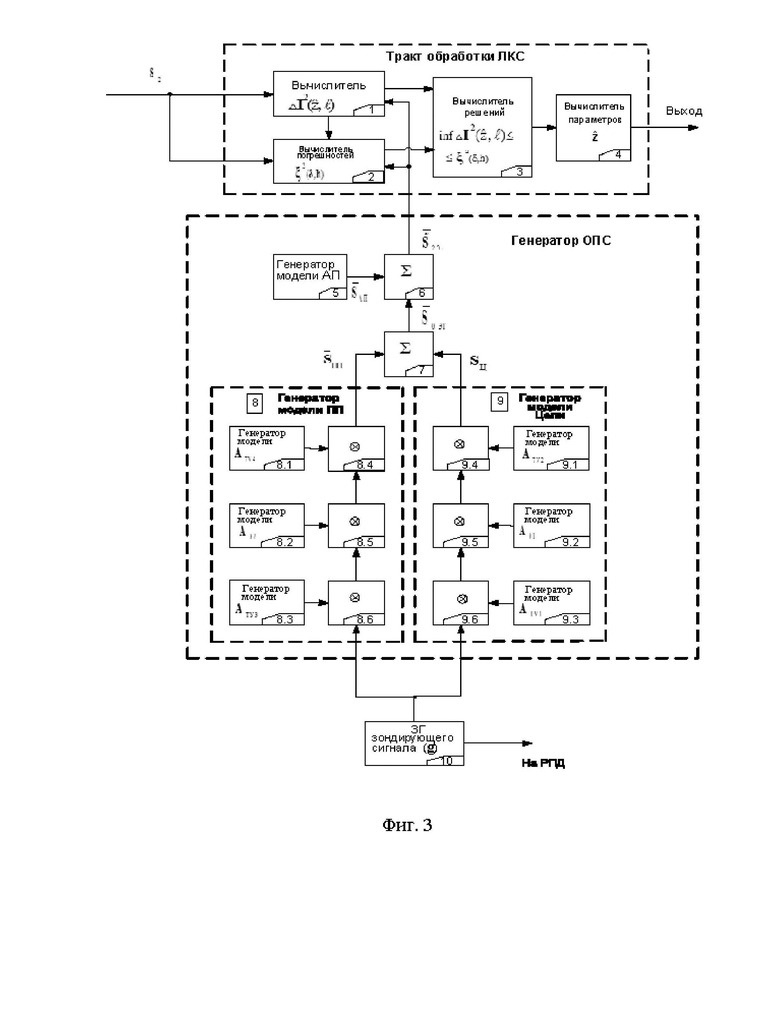
Известен [13] «Способ регуляризованного обнаружения полезных радиолокационных сигналов» - (РГО) - Патент РФ № 2694235, МПК G01S 13/04, показанный на фиг. 3 структурной схемой его алгоритма, включающий стандартный радиоприем и обработку принятых сигналов  , в ходе которой осуществляют одновременно вычисление нормированной функциональной невязки ΔI2 между и опорным сигналом (ОПС) -
, в ходе которой осуществляют одновременно вычисление нормированной функциональной невязки ΔI2 между и опорным сигналом (ОПС) -  , определение совокупных погрешностей
, определение совокупных погрешностей  измерений (СВПИ) принятых сигналов, затем - сопоставление ΔI2 с , принимают решение по критерию нахождения невязки ΔI2 в пределах об обнаружении полезных сигналов (ПС), содержащих регуляризованные интервальные оценки [
измерений (СВПИ) принятых сигналов, затем - сопоставление ΔI2 с , принимают решение по критерию нахождения невязки ΔI2 в пределах об обнаружении полезных сигналов (ПС), содержащих регуляризованные интервальные оценки [ ] информационных параметров Цели, далее вычисляют минимум-экстремум этой невязки inf ΔI2 и принимают решение об оценках местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах интервальных оценок [].
] информационных параметров Цели, далее вычисляют минимум-экстремум этой невязки inf ΔI2 и принимают решение об оценках местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах интервальных оценок [].
При этом опорный сигнал формируют на основе функционального анализа (ФАН) преобразований ЛКС на РЛ-трассе по её структурно-физической модели как аддитивную смесь модельного представления  активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который в свою очередь формируют суммированием модельного представления
активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который в свою очередь формируют суммированием модельного представления  пассивных помех и модельного представления
пассивных помех и модельного представления  отклика от Цели (фиг. 2).
отклика от Цели (фиг. 2).
Генерацию модельного представления осуществляют путем свертки ЗС с модельным представлением собственных радиофизических характеристик третьего по СФМ участка (ТУ3) трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объектов/явлений - источников ПП (в основном НПЗО), результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ четвертого по СФМ участка (ТУ4) трассы локации. Генерацию модельного представления отклика от Цели осуществляют путем свертки ЗС с модельным представлением собственных РФХ первого участка (ТУ1) трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объекта локации, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ второго участка (ТУ 2) трассы локации.
Применительно к РГО в ЗГ РЛС понятия модельных представлений собственных РФХ ионосферы и других, соответствующих схеме СФМ элементов РЛ-трасс - это модельные представления об их объективных, не зависящих от технического воздействия, регулярных и/или стохастических в общем случае, «собственных» радиофизических свойствах (РФС) элементов ионосферы и НПЗО, обусловливающих мультипликативные воздействия на распространение ЭМВ их «собственными» электрофизическими свойствами (ЭФС). Поэтому модели, интерпретирующие МП-воздействия на распространение ЭМВ «собственных» ЭФС и РФС элементов ионосферы и НПЗО, применительно к алгоритму РГО являются исходными собственными моделями (ИСМ) источников этих мультипликативных воздействий в соответствии с СФМ. Надо учитывать, что такая структурно-физическая модель описывает самые сложные в области радиолокации, радиозондирования процессы преобразований ЛКС, его радиоприема и обработки и в этом смысле представляет собой гипотетически наиболее общий вид подобной модели. Указанный способ-прототип регуляризованного обнаружения ПС по патенту РФ № 2694235 является общим для радиолокации в целом и свободен от недостатков традиционных способов статистической обработки радиолокационных сигналов. Однако, он не свободен от важнейшей проблемы адекватного учета нестационарности в общем случае ИПРРВ и соответствующих потерь локационной эффективности в ЗГРЛ. Его основные недостатки:
Опорный сигнал формируют без требуемого для регуляризации решений РГО в условиях нестационарного в общем случае ИПРРВ ограничения пространств Z параметров модельных представлений собственных РФХ участков трассы локации и Цели. Проблема адекватного обнаружения преодолена только на принципиальном уровне путем регуляризации решений РГО об обнаружении на основе использования априорной информации, представленной в общем виде без требуемых ограничений модельных пространств её параметров. При этом генерацию модельного представления пассивных помех, как составляющей опорного сигнала , осуществляют путем первой свертки ЗС с модельным представлением собственных РФХ третьего по СФМ участка (ТУ3) трассы локации, последующей второй свертки результата первой свертки с модельным представлением собственных РФХ объектов/явлений - источников ПП (в основном - НПЗО), последующей третьей свертки результата второй свертки с модельным представлением собственных РФХ четвертого по СФМ участка (ТУ4), без требуемого для регуляризации решений РГО в условиях нестационарного в общем случае ИПРРВ ограничения при всех трех свертках пространств Z параметров указанных модельных представлений собственных РФХ участков трассы локации и НПЗО до пространств {}3,НПЗО,4 допустимых параметров в рамках пространств {Z}3, (НПЗО), 4 возможных параметров: {}3,(НПЗО),4 {Z}3,(НПЗО),4Z. Генерацию модельного представления отклика от Цели, как составляющей опорного сигнала , осуществляют путем первой свертки ЗС с модельным представлением собственных РФХ первого по СФМ участка (ТУ1) трассы локации, последующей второй свертки результата первой свертки с модельным представлением собственных РФХ объекта локации, последующей третьей свертки результата второй свертки с модельным представлением собственных РФХ четвертого по СФМ участка (ТУ4), без требуемого для регуляризации решений РГО в условиях нестационарного в общем случае ИПРРВ ограничения при всех трех свертках пространств Z параметров указанных модельных представлений собственных РФХ участков трассы локации и Цели до пространств {}1, Ц, 4 допустимых параметров в рамках пространств {Z}1, Ц , 4 возможных параметров: {}1, Ц, 4 {Z}1, Ц , 4 Z.
{Z}3,(НПЗО),4Z. Генерацию модельного представления отклика от Цели, как составляющей опорного сигнала , осуществляют путем первой свертки ЗС с модельным представлением собственных РФХ первого по СФМ участка (ТУ1) трассы локации, последующей второй свертки результата первой свертки с модельным представлением собственных РФХ объекта локации, последующей третьей свертки результата второй свертки с модельным представлением собственных РФХ четвертого по СФМ участка (ТУ4), без требуемого для регуляризации решений РГО в условиях нестационарного в общем случае ИПРРВ ограничения при всех трех свертках пространств Z параметров указанных модельных представлений собственных РФХ участков трассы локации и Цели до пространств {}1, Ц, 4 допустимых параметров в рамках пространств {Z}1, Ц , 4 возможных параметров: {}1, Ц, 4 {Z}1, Ц , 4 Z.
Генерация таким способом представлений , и без требуемого для регуляризации решений РГО в условиях нестационарного в общем случае ИПРРВ ограничения пространств Z параметров указанных модельных представлений собственных РФХ участков трассы локации и Цели при всех трех свертках в условиях нестационарности ИПРРВ приводит к неограниченности пространств Z, соответственно - к невозможности реализации алгоритма РГО для ЗГ РЛС, что является существенным недостатком прототипа.
Корректные данные о пространствах допустимых параметров указанных модельных представлений собственных РФХ в рамках пространств их возможных параметров {} {Z} Z для формирования опорного сигнала, и соответственно - решения уравнения обнаружения РГО при нестационарном ИПРРВ невозможно получить путем традиционно статистических измерений на больших выборках, соответственно - относительно длительных, в общем случае неадекватных стохастической динамике ионосферы.
Постановка задачи изобретения.
Задача изобретения - устранение недостатков прототипа путем корректного формирования в условиях нестационарного ИПРРВ опорного сигнала регуляризованного обнаружителя , его основных составляющих - модельных представлений пассивных помех и отклика от Цели - c требуемым для регуляризации решений РГО, определяемым на основе корректных измерений на каждом текущем интервале Δtст отн относительной стационарности ИПРРВ, регуляризующим ограничением пространства Z параметров композиции модельных представлений собственных РФХ всех элементов трассы локации и Цели, эквивалентной их комплексному МП-воздействию на ЛКС на РЛ-трассе.
Других средств и способов решения такой задачи на известном уровне техники не выявлено.
Техническим результатом, достигаемым за счет решения поставленной задачи, является корректное формирование в условиях нестационарного ИПРРВ опорного сигнала регуляризованного обнаружителя , его основных составляющих - модельных представлений пассивных помех и отклика от Цели - c требуемым для регуляризации решений РГО, определяемым на основе корректных измерений на каждом текущем интервале Δtст отн относительной стационарности ИПРРВ, регуляризующим ограничением пространства Z параметров композиции модельных представлений собственных РФХ всех элементов трассы локации и Цели, эквивалентной их комплексному МП-воздействию на ЛКС на РЛ-трассе.
Сущность изобретения
Решение сформулированной задачи и достижение заявленного технического результата обеспечивается тем, что способ регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн путём стандартного радиоприема, обработки принятых сигналов , в процессе которой выполняют одновременно вычисление нормированной функциональной невязки ΔI2 между и опорным сигналом , который формируют как аддитивную смесь модельного представления активных помех и модельного представления комплекса мультипликативных воздействий на ЛКС, который формируют суммированием составляющих - модельного представления пассивных помех и модельного представления принятого отклика от Цели, определение совокупных погрешностей  измерений принятого сигнала, затем - сопоставление ΔI2 с , вырабатывают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки [] информационных параметров Целей по критерию нахождения невязки ΔI2 в пределах , последующее вычисление минимума-экстремума функциональной невязки inf ΔI2 и на этой основе - принятие решения об оценках местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах интервальных оценок [].
измерений принятого сигнала, затем - сопоставление ΔI2 с , вырабатывают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки [] информационных параметров Целей по критерию нахождения невязки ΔI2 в пределах , последующее вычисление минимума-экстремума функциональной невязки inf ΔI2 и на этой основе - принятие решения об оценках местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах интервальных оценок [].
Новыми отличительными признаками заявленного способа, является то, что в условиях нестационарного ИПРРВ опорный сигнал (ОПС) и его основные составляющие - модельные представления пассивных помех и принятого отклика от Цели - формируют в начале каждого текущего интервала обработки ТОБР принятых ЛКС, не превышающего интервал Δtст отн относительной стационарности ИПРРВ, с требуемым для регуляризации решений РГО регуляризующим ограничением пространства Z параметров композиции комплекса модельных представлений АПП собственных РФХ всех элементов трассы локации - источников пассивных помех (ПП), эквивалентной их комплексному мультипликативному воздействию (МП-воздействию) на ЛКС на РЛ-трассе, до пространства {} допустимых параметров композиции АПП в рамках пространства {Z} их возможных параметров [{} {Z}], регуляризующим ограничением пространства Z параметров модельных представлений АЦ собственных РФХ потенциальных Целей, эквивалентных их МП-воздействию на ЛКС на РЛ-трассе, получаемых из специальной БД, до пространства {} их допустимых параметров в рамках пространства {Z} их возможных параметров [{} {Z}].
При этом формирование модельного представления пассивных помех осуществляют в течение каждого текущего интервала Δtст отн > ТОБР путем свертки зондирующего сигнала (ЗС) с композицией комплекса модельных представлений АПП, определяемой в итоге измерений, анализа характеристик и генерации модельных представлений получаемых с выхода РПУ принятых в начале каждого периода обработки ТОБР пробных, соответствующих Δ-функции Дирака, ΔД-сигналов ВНЗ/ΔД-зондирования последовательно по частоте и локационной задержке, отвечающей в силу свойств Δ-функции Дирака требованию регуляризующего ограничения пространства Z параметров композиции комплекса модельных представлений АПП до пространства {} допустимых параметров в рамках пространства {Z} их возможных параметров [{} {Z}], причем ВНЗ/ΔД-зондирование при ЗГРЛ проводят последовательным излучением радиопередатчиком (РПД) поочередно двух указанных «пробных» сигналов: относительно длительного квазимонохроматического сигнала «включения» ΔДƒ и относительно короткого строб-импульса ΔДτ.
Формирование модельного представления принятого отклика от Цели осуществляют путем свертки композиции комплекса модельных представлений АПП с результатом предварительной свертки ЗС с модельным представлением АЦ собственных РФХ потенциальной Цели, отвечающим требованию регуляризующего ограничения пространства {} допустимых параметров комплекса модельных представлений АЦ в рамках пространства {Z} их возможных параметров [{} {Z}].
осуществляют путем свертки композиции комплекса модельных представлений АПП с результатом предварительной свертки ЗС с модельным представлением АЦ собственных РФХ потенциальной Цели, отвечающим требованию регуляризующего ограничения пространства {} допустимых параметров комплекса модельных представлений АЦ в рамках пространства {Z} их возможных параметров [{} {Z}].
Обоснование достижимости заявленного технического результата.
Принятый радиоприемным устройством (РПУ) сигнал в общем случае традиционно моделируется многомерной функцией  (t, g, ƒ, τ3, θпр, …), где t - время, g - излучаемый зондирующий сигнал (ЗС), ƒ - частота, τ3 - задержка, θпр - углы прихода радиоволн в точку приема.
(t, g, ƒ, τ3, θпр, …), где t - время, g - излучаемый зондирующий сигнал (ЗС), ƒ - частота, τ3 - задержка, θпр - углы прихода радиоволн в точку приема.  является продуктом воздействия на прохождение и прием ЗС в системе «РЛС - среда - Цель - среда - РЛС» всех видов мультипликативных помех (МП-воздействий, МП-помех), многообразных, также мультипликативных, возмущающих воздействий (в том числе Цели) на ЛКС, активных помех (АП) [1, 2, 4, 7, и др.]. Можно показать, что связь между ЗС и выходным сигналом системы математически описывается интегральным уравнением типа свертки, записываемым в операторном виде [6, 10, 14, 15, 16, 17]:
является продуктом воздействия на прохождение и прием ЗС в системе «РЛС - среда - Цель - среда - РЛС» всех видов мультипликативных помех (МП-воздействий, МП-помех), многообразных, также мультипликативных, возмущающих воздействий (в том числе Цели) на ЛКС, активных помех (АП) [1, 2, 4, 7, и др.]. Можно показать, что связь между ЗС и выходным сигналом системы математически описывается интегральным уравнением типа свертки, записываемым в операторном виде [6, 10, 14, 15, 16, 17]:

где Ас - линейный непрерывный многомерный интегральный оператор, определяемый передаваемым сигналом,
 - функция аргумента
- функция аргумента  - МП-воздействия Цели на ЛКС на фоне воздействий нестационарной среды и помех.
- МП-воздействия Цели на ЛКС на фоне воздействий нестационарной среды и помех.
В любом случае, когда возникает необходимость по результатам измерений принять решение о причинах, их породивших, следует решать классическую обратную задачу. Применительно к информационным радиосистемам, включая радиолокацию, - это задача обнаружения, выделения и распознавания ПС. В [6, 13, 14, 15, 16, 17] обосновано, что если несет искомую информацию о воздействии Цели на радиолокационный сигнал, который в таком случае является полезным, то ее оценка является решением интегрального уравнения Фредгольма 1 рода типа свертки:

где - функция собственных радиофизических свойств Цели, А-1с - оператор, обратный Ас.
Задача решения таких уравнений называется некорректно поставленной, если нарушено хотя бы одно из этих трех условий Адамара [15, 16, 17].
При решении прикладных задач в условиях нестационарного ИПРРВ левая часть уравнения (1) всегда задана приближенно из-за совокупных погрешностей  измерений (СВПИ), определяемых в основном помехами (здесь
измерений (СВПИ), определяемых в основном помехами (здесь  и h - параметры, характеризующие, соответственно, случайную и систематическую h погрешности измерений ). Как следствие - задача нахождения характеристик Цели по (2) традиционными статистическими методами при нестационарности ИПРРВ в общем случае является некорректно поставленной как из-за неединственности, так и по причине неустойчивости решения этого уравнения [13, 14, 15, 16, 17]. Даже при относительно малых ошибках измерений традиционные способы решений (2) в общем по УСФ случае невыполнимы, так как в при этом обратный оператор А-1с может либо не существовать, либо не быть непрерывным. Этот вывод подтверждается в [6, 7, 10] операторным функциональным анализом (ФАН) формирования и прохождения сигналов в информационных радиосистемах (ИРС).
и h - параметры, характеризующие, соответственно, случайную и систематическую h погрешности измерений ). Как следствие - задача нахождения характеристик Цели по (2) традиционными статистическими методами при нестационарности ИПРРВ в общем случае является некорректно поставленной как из-за неединственности, так и по причине неустойчивости решения этого уравнения [13, 14, 15, 16, 17]. Даже при относительно малых ошибках измерений традиционные способы решений (2) в общем по УСФ случае невыполнимы, так как в при этом обратный оператор А-1с может либо не существовать, либо не быть непрерывным. Этот вывод подтверждается в [6, 7, 10] операторным функциональным анализом (ФАН) формирования и прохождения сигналов в информационных радиосистемах (ИРС).
В [6] показано, что в общем по УСФ случае, в основном - в силу нестационарного ионосферно-пространственного распространения радиоволн, ЛКС, в том числе отраженный от Цели сигнал, на пути по трассе локации может претерпевать ряд функциональных преобразований, приводящих к переводу принятого сигнала  в совершенно иное, чем ожидаемое по форме зондирующего сигнала g , функциональное пространство: g G =>
в совершенно иное, чем ожидаемое по форме зондирующего сигнала g , функциональное пространство: g G =>  . Такое несоответствие, а также неизбежные ошибки измерений
. Такое несоответствие, а также неизбежные ошибки измерений  , делают задачу ЗГ-радиолокации, как уже констатировалось, не просто обратной, но и некорректно поставленной, обусловливает принципиальную невозможность при нестационарном ИПРРВ обнаружения ПС и выделения искомой информации и/или невосполнимые потери ΔI2 этой информации при использовании всех известных способов обработки сигналов при приеме. В [13] эта проблема на принципиальном уровне преодолена путем регуляризации решений РГО об обнаружении на основе использования априорной информации, представленной в общем виде без требуемых ограничений модельных пространств её параметров. Поэтому, как уже было подчеркнуто, РГО не свободен от важнейшей проблемы адекватного учета воздействия на ЛКС фактора нестационарности ИПРРВ из-за невозможности в таких условиях получения регуляризованных решений обнаружителя без регуляризующих эти решения ограничений на основе корректных априорных/экспериментальных данных пространств Z параметров модельных представлений собственных РФХ участков трассы локации и Цели до пространств {} допустимых параметров указанных модельных представлений в рамках пространств {Z} их возможных параметров: {} {Z} Z.
, делают задачу ЗГ-радиолокации, как уже констатировалось, не просто обратной, но и некорректно поставленной, обусловливает принципиальную невозможность при нестационарном ИПРРВ обнаружения ПС и выделения искомой информации и/или невосполнимые потери ΔI2 этой информации при использовании всех известных способов обработки сигналов при приеме. В [13] эта проблема на принципиальном уровне преодолена путем регуляризации решений РГО об обнаружении на основе использования априорной информации, представленной в общем виде без требуемых ограничений модельных пространств её параметров. Поэтому, как уже было подчеркнуто, РГО не свободен от важнейшей проблемы адекватного учета воздействия на ЛКС фактора нестационарности ИПРРВ из-за невозможности в таких условиях получения регуляризованных решений обнаружителя без регуляризующих эти решения ограничений на основе корректных априорных/экспериментальных данных пространств Z параметров модельных представлений собственных РФХ участков трассы локации и Цели до пространств {} допустимых параметров указанных модельных представлений в рамках пространств {Z} их возможных параметров: {} {Z} Z.
Естественно, необходимые регуляризующие ограничения пространств Z параметров модельных представлений собственных РФХ участков трассы локации и Цели для соответствующей непрерывной текущей корректировки этих моделей требуют проведения адекватных текущим условиям нестационарного ИПРРВ моделирования и корректных текущих измерений основных параметров как регулярных, так и стохастичных изменений ГФУ, РФУ ионосферы. Существующими измерительными аппаратурно-программными комплексами (АПК) подсистем АГФУ в условиях нестационарного ИПРРВ это невозможно. Они не отвечают в таких условиях требованиям точности, адекватности и соответствия по оперативности (быстродействию) упомянутым случайным+регулярным изменениям основных параметров ГФУ, РФУ в части быстрых, критичных для адаптации РЛС изменений. Это возможно только на переменных по длительности интервалах текущей стационарности ИПРРВ с применением «Способа определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн» по Патенту РФ № 2409821, G01S 13/00 [18].
При этом применяют общепринятое и практически всегда реализующееся допущение об относительной «медленности» динамики регулярных составляющих ГФУ, РФУ в ионосфере, следствием чего является существенное превышение обычным статистически определяемым интервалом Δtст стационарности ИПРРВ длительности τЗС и периода повторения ТП зондирующего сигнала, соответствующего интервала обработки ТОБР принимаемых сигналов (включая когерентное накопление Ткн). По обобщенным известным экспериментальным данным (ЭКД) в зависимости от УСФ этот интервал составляет от нескольких секунд до нескольких десятков минут [2, 19, 20 и др.]. При этом надо помнить о классической трактовке приведенного здесь широко используемого в ЗГ РЛС понятия стационарности, подчеркнем - статистической: постоянство статистических параметров ЛКС (математического ожидания/среднего, дисперсии/СКО, других моментов) на интервале репрезентативных (но на интервале ТОБР - весьма ограниченных) выборок. Это означает, что в условиях нестационарного ИПРРВ применяемые статистические модели макроизменений в реальной связности ГФУ → РФУ → ЛКС и способы обработки сигналов в общем по УСФ случае, как показано выше, будут математически некорректны. Их использование оправдано лишь в частных случаях длительной устойчивости фактора упомянутой «медленности» изменений регулярных составляющих изменений характеристик ионосферы в рамках допустимых в определенной мере ошибок статистических измерений и прогноза параметров регулярных вариаций ГФУ, РФУ. В таких условиях статистические оценки ГФУ неизбежно сопровождаются неопределенной меры погрешностями, подсистемы АГФУ реализуют приемлемую адаптацию только для частных случаев по условиям функционирования, когда ионосфера приемлемо «спокойна», то есть, - не «возмущена», соответствует заложенной в алгоритмы её идеализированной модели. Выборка ЛКС на периоде ТОБР безусловно не отвечает полным требованиям репрезентативности для оценки стационарности в описанном классическом представлении, но также безусловно несет информацию о наличии/отсутствии/характеристиках Цели на РЛ-трассе, о характеристиках ПП и АП. В силу краткости ТОБР можно утверждать, что на этом интервале будет соблюдаться не просто «медленность изменений» - а будет иметь место постоянство связности параметров ГФУ → РФУ → ЛКС, соответственно - наблюдаться стабильность текущих характеристик ЛКС. В условиях нестационарности ИПРРВ даже на коротком временном промежутке от одного интервала ТОБР к другому вполне возможно такое стохастичное изменение ГФУ → РФУ → ЛКС, что указанное постоянство параметров ЛКС будет нарушено. Пороговая мера такого «нарушения» является отображением критического изменения характеристик ИПРРВ, в той или иной мере связанного с изменениями на ТОБР текущей регулярной + случайной вариативности ГФУ → РФУ → ЛКС и тем самым служит в [18] критерием оценки интервала Δtст отн текущей относительной стационарности РЛ-трассы. Подчеркнем: не статистической, а текущей «скользящей» относительной стационарности (ОСТ) от одного интервала ТОБР до другого. Способ по [18] в силу свойств Δ-функции Дирака позволяет на каждом текущем интервале Δtст отн > ТОБР выполнять регуляризованный перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР изменений параметров ГФУ и РФУ принимаемых сигналов путем последовательного в начале каждого периода ТОБР ВНЗ/ΔД-зондирования РЛ-трасс пробными, соответствующими Δ-функции Дирака, сигналами ΔДƒ по ƒ - частоте и ΔДτ по τ3 - задержке. Указанное ВНЗ/ΔД-зондирование проводят вне рамок настоящего изобретения при ЗГРЛ последовательным излучением радиопередатчиком (РПД) поочередно двух указанных «пробных» сигналов: относительно длительного квазимонохроматического сигнала «включения» ΔДƒ и относительно короткого строб-импульса ΔДτ Такие пробные сигналы в процессе распространения по РЛ-трассе испытывают на себе весь комплекс мультипликативных воздействий на ЛКС и являются тем самым при их радиоприеме адекватными в силу свойств Δ-функции Дирака носителями информации о всех МП-воздействиях на РЛ-трассе. Именно поэтому в заявляемом способе в силу свойств Δ-функции Дирака также применен перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР изменений параметров принимаемых ΔД-сигналов, модельные представления которых позволяют регуляризовать формирование комплекса модельных представлений АПП собственных РФХ всех элементов трассы локации - источников ПП, эквивалентной их комплексному МП-воздействию на ЛКС на РЛ-трассе. Разумеется, для этого необходим комплекс корректных измерений, анализа характеристик и моделирования принятых пробных сигналов ΔДƒ, ΔДτ
В условиях нестационарного ИПРРВ опорный сигнал регуляризованного обнаружителя, его основные составляющие - модельные представления пассивных помех и принятого отклика от Цели - также необходимо формировать в начале каждого текущего интервала обработки ТОБР принимаемых ЛКС, не превышающего интервал Δtст отн относительной стационарности ИПРРВ, с требуемым для регуляризации решений РГО регуляризующим ограничением пространства Z параметров композиции указанного комплекса модельных представлений АПП до пространства {} допустимых параметров в рамках пространства {Z} их возможных параметров [{} {Z}], регуляризующим ограничением пространства Z параметров модельных представлений АЦ собственных РФХ потенциальных Целей, эквивалентных их МП-воздействию на ЛКС на РЛ-трассе, получаемых из специальной БД, до пространства {} их допустимых параметров в рамках пространства {Z} их возможных параметров [{} {Z}].
В соответствии с представленными соображениями в заявляемом изобретении на каждом текущем интервале Δtст отн > ТОБР при синтезе композиции АПП модельных представлений собственных РФХ участков трассы локации и Цели в итоге упомянутого анализа измеренных характеристик и моделирования принятых пробных ΔД-сигналов ВНЗ/ΔД-зондирования будут получены данные текущих регуляризующих ограничений пространства Z параметров указанной композиции до пространства {} её допустимых параметров в рамках {} {Z} Z.
Таким образом будет обеспечено решение задачи изобретения, а заявляемый способ - инвариантен по УСФ и географии РЛ-трасс, адекватен регулярной+случайной динамике ионосферы.
Ссылка на чертежи
Актуальность, обоснование и формулировку задачи изобретения иллюстрируют показанные на фиг. 1, 2, 3 физическая схема ИПРРВ, структурно-физическая схема ЗГРЛ, блок-схема алгоритма регуляризованного обнаружителя-прототипа соответственно.
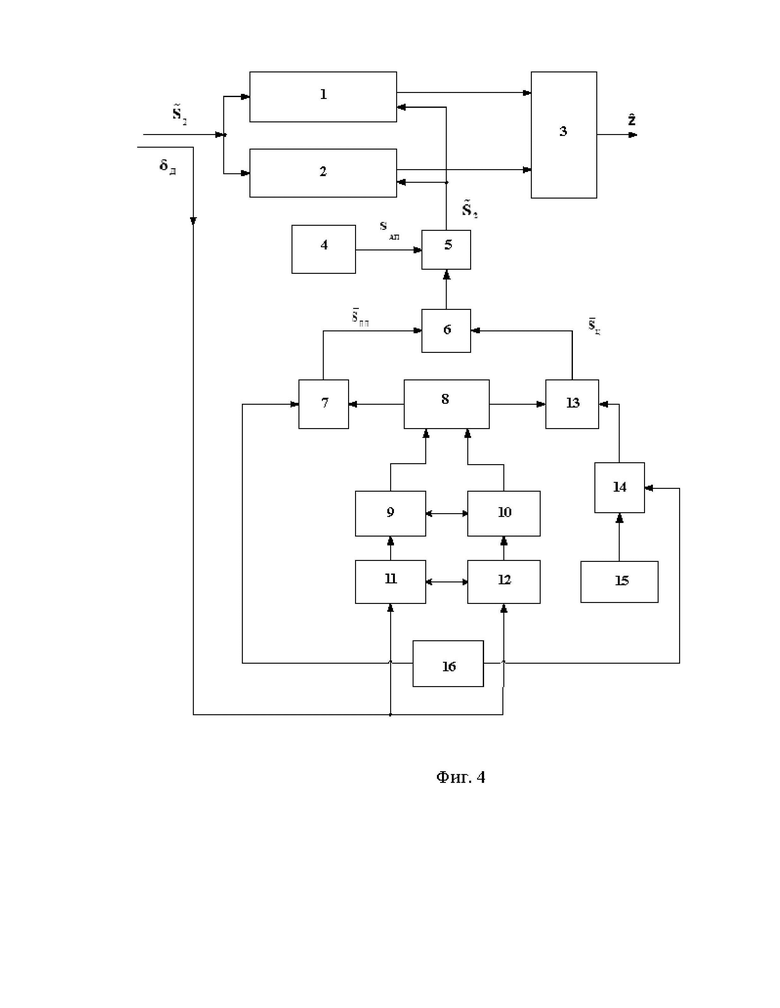
Сущность заявляемого изобретения поясняется структурной блок-схемой (фиг. 4) алгоритма регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн.
На фиг. 4 номерами позиций обозначены следующие операции, отображающие описанные выше действия на каждом периоде ТОБР по способу (с учетом локационной задержки):
- Операция 1. Определение функциональной невязки ΔI2 между принятым сигналом и адекватно сформированным опорным сигналом ,
- Операция 2. Одновременная с Операцией 1 оценка совокупных погрешностей измерений ,
- Операция 3. Принятие решений об обнаружении полезных сигналов путем сопоставления невязки ΔI2 с , о регуляризованной интервальной оценке [] информационных параметров Цели по критерию нахождения невязки ΔI2 в пределах , о последующих оценках информационных параметров Цели по критерию нахождения минимума-экстремума inf ΔI2 в пределах интервальных оценок [],
- Операция 4. Генерация модельного представления активных помех,
- Операция 5. Формирование модельного представления опорного сигнала путем суммирования модельного представления активных помех, получаемой в итоге операции 4, и модельного представления комплекса МП-воздействий на ЛКС по итогам операции 6,
- Операция 6. Формирование композиции модельных представлений комплекса всех МП-воздействий на ЛКС на РЛ-трассе путем суммирования модельного представления пассивных помех, получаемого в итоге операции 7, и модельного представления принятого отклика от Цели, получаемого в итоге операции 13,
- Операция 7. Формирование модельного представления пассивных помех путем свертки ЗС с определяемой в итоге операции 8 композицией комплекса модельных представлений АПП собственных РФХ всех элементов трассы локации - источников ПП, эквивалентной их комплексному МП-воздействию на ЛКС на РЛ-трассе.
- Операция 8. Генерация композиции комплекса модельных представлений АПП собственных РФХ всех элементов трассы локации - источников ПП на основе операций 9, 10, отвечающей требованию регуляризующего ограничения пространства {} допустимых параметров комплекса модельных представлений АПП
- Операция 9. Генерация модели принятых пробных сигналов ΔДƒ ВНЗ/ΔД-зондирования по частоте по данным операции 11.
- Операция 10. Генерация вслед за операцией 9 модели принятых пробных сигналов ΔДτ ВНЗ/ΔД-зондирования по локационной задержке по данным операции 12.
- Операция 11. Анализ в начале каждого периода обработки ТОБР на каждом текущем интервале Δtст отн > ТОБР комплекса измеренных частотных характеристик принятых пробных, соответствующих Δ-функции Дирака, сигналов ΔДƒ, получаемых путем ВНЗ/ΔД-зондирования РЛ-трасс пробными сигналами ΔДƒ по ƒ - частоте, регуляризующего в силу свойств Δ-функции Дирака перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР изменений параметров ГФУ и РФУ принимаемых сигналов, и обеспечивающего тем самым ограничение пространства {} допустимых параметров комплекса модельных представлений АПП по частоте,
- Операция 12. Вслед за операцией 11 - анализ в начале каждого периода обработки ТОБР на каждом текущем интервале Δtст отн > ТОБР совокупности измеренных характеристик по задержке принятых пробных, соответствующих Δ-функции Дирака, сигналов ΔДτ, получаемых путем ВНЗ/ΔД-зондирования РЛ-трасс пробными сигналами ΔДτ по τ3 - задержке последовательно после приема сигналов ΔДƒ по частоте, регуляризующего в силу свойств Δ-функции Дирака перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР изменений параметров ГФУ и РФУ принимаемых сигналов, и обеспечивающего тем самым ограничение пространства {} допустимых параметров комплекса модельных представлений АПП по задержке,
- Операция 13. Генерация модельного представления принятого отклика от Цели путем свертки результатов операции 14 с определяемой в итоге операции 8 композицией комплекса модельных представлений АПП ,
- Операция 14. Свертка ЗС с получаемым из специальной БД в результате операции 15 модельным представлением АЦ собственных РФХ потенциальной Цели.
- Операция 15. Генерация модельного представления АЦ собственных РФХ потенциальной Цели, эквивалентного её МП-воздействию на ЛКС на РЛ-трассе, отвечающей требованию регуляризующего ограничения пространства {} допустимых параметров модельных представлений АЦ.
- Операция 16. Генерация ЗС.
Раскрытие сущности изобретения.
Согласно схеме фиг. 4 регуляризованное обнаружение полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн состоит в следующем:
В соответствии с операцией 1 определяется функциональная невязка ΔI2 между принятым радиоприемным устройством (РПУ) радиолокационным сигналом и опорным сигналом , который формируют (операция 5) как аддитивную смесь генерируемого в итоге операции 4 модельного представления активных помех и модельного представления комплекса мультипликативных воздействий на ЛКС, который формируют суммированием (операция 6) модельного представления пассивных помех, получаемого в итоге операции 7, и модельного представления принятого отклика от Цели, получаемого в итоге операции 13.
Одновременно с операцией 1, проводится операция 2 - оценка совокупных погрешностей измерений . Затем в ходе операции 3 осуществляется сопоставление ΔI2 с , вырабатывается решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки [] информационных параметров Целей по критерию нахождения невязки ΔI2 в пределах , последующее вычисление минимума-экстремума функциональной невязки inf ΔI2 и на этой основе - принятие решения об оценках местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах интервальных оценок [].
Формирование модельного представления пассивных помех осуществляют в течение каждого текущего интервала Δtст отн > ТОБР в ходе операции 7 путем свертки ЗС (генерируемого в ходе операции 15) с композицией комплекса модельных представлений АПП собственных РФХ всех элементов трассы локации - источников ПП, эквивалентной их комплексному МП-воздействию на ЛКС на РЛ-трассе, определяемой в итоге операции 8, реализуемой измерениями, анализом характеристик (операции 11 и 12) и генерацией (операции 9 и 10) модельных представлений получаемых с выхода РПУ принятых последовательно в начале каждого периода обработки ТОБР «пробных», соответствующих Δ-функции Дирака, ΔД-сигналов ВНЗ/ΔД-зондирования последовательно по частоте и локационной задержке, отвечающей в силу свойств Δ-функции Дирака требованию регуляризующего ограничения пространства {} допустимых параметров комплекса модельных представлений АПП в рамках пространства {Z} их возможных параметров [{} {Z}]. Формирование модельного представления составляющей принятого отклика от Цели осуществляют путем свертки (операция 13) композиции комплекса модельных представлений АПП с результатом операции 14 - предварительной свертки ЗС с модельным представлением АЦ собственных РФХ потенциальной Цели, отвечающим требованию регуляризующего ограничения пространства {} допустимых параметров комплекса модельных представлений АЦ в рамках пространства {Z} их возможных параметров [{} {Z}].
Промышленная применимость
Изобретение разработано на уровне технического предложения и математического моделирования.
Теоретические исследования заявляемого способа показали, что он обеспечивают в общем по УСФ случае во столько раз меньшие потери информации о Цели, чем известные способы обнаружения, во сколько раз функциональное уклонение в L2 применяемых моделей собственных РФХ различных элементов трасс локации и Целей от реальных представлений в первом случае меньше, чем во втором, ориентированном на идеализированные УСФ. Выполнение описанных действий в их последовательности позволяет в общем по УСФ случае учесть особенности и преодолеть описанные недостатки известного способа, достичь решения сформулированной задачи с введением её в класс корректно поставленных, с обеспечением обнаружения полезных сигналов, содержащих информацию о Цели, с получением оценок её местоположения и параметров движения в самых общих условиях ионосферно-пространственного распространения радиоволн при воздействии на прием всех возможных видов мультипликативных и активных помех, возмущающих воздействий естественного и искусственного происхождения. Эффективность заявляемого способа была проверена ЭВМ-моделированием. Ставилась задача определения по произвольно заданным реализациям частотного спектра принятого сигнала неизвестных исходных спектральных характеристик Цели с упрощенным формированием ОПС: модель исходного собственного спектра рассеяния сигнала Целью была задана в широком диапазоне его форм и частот, пассивная помеха считалась удовлетворительно компенсированной, модель АП задавалась в виде сосредоточенных по частоте помех, приводящих к флуктуациям принимаемого сигнала по уровню на (10 - 25)% [17]. Результат: произвольно большие ошибки (многократные) восстановления исходных спектральных характеристик Цели при согласованной фильтрации, восстановление заявляемым способом - с точностью (5 - 15) %.
Использованные источники информации
1. Основы загоризонтной радиолокации. Под ред. Колосова А.А., М., "Радио и связь", 1984.
2. Акимов В. Ф., Калинин Ю. К. Введение в проектирование ионосферных загоризонтных радиолокаторов. Под ред. Боева С.Ф., М., «Техносфера», 2017.
3. Миддлтон Д. Многомерное обнаружение и выделение сигналов в случайных средах (David Middleton Multidimensional Detection and Extraction of Signals in Random Media). ТИИЭР, № 5, 1970.
4. Woodward P. M. Probability, and Information Theory, with Application to Radar Pergamon Press, N. Y., 1953 Yen K.C., Liu C.H. Radio wave scintillations in the ionosphere. Proc. of the IEEE, 1982, v. 70, № 4.
5. Исимару А. Распространение и рассеяние волн в случайно-неоднородных средах, т. 1, 2. М., "Мир", 1981.
6. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Обобщенный функциональный анализ информационных радиосистем. Тверь, «Вестник ТвГУ. Серия «Прикладная математика», 2015, № 1
7. Ануфриев А.И., Ватолло В.В., Гордеев В.А. и др. Методы, средства и результаты экспериментально-теоретических исследований характеристик сигналов в каналах декаметрового диапазона. Обзор. М., НИИЭИР, Депонированная рукопись № 32-69, 1987.
8. Яковлев О.И., Якубов В.П., Урядов В.П., Павельев А.Г. Распространение радиоволн. М., изд-во URSS, 2015.
9. Чернов Ю.А. Возвратно-наклонное зондирование ионосферы. М., "Связь", 1971.
10. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Оценка качества информационных радиосистем. Тверь, «Вестник ТвГУ. Серия «Прикладная математика», № 2, 2015.
11. Акимов В. Ф., Калинин Ю. К., Слукин Г.П. Проблемы загоризонтного радиолокационного обнаружения и пути их преодоления. М., «Вестник МГТУ им. Н.Э. Баумана», 2012, № 7.
12. Шустов Э.И. Проблемы загоризонтной радиолокации и принципы построения загоризонтных РЛС. М., «Радиотехника», 1997.
13. Арефьев В.И., Богданов О.А., Гордеев В.А., Никонова Л.В., Тихонов В.В. Способ регуляризованного обнаружения полезных радиосигналов. Патент РФ № 2694235, G01S 13/04.
14. Герасимов Ю.С., Гордеев В.А., Кристаль В.С. Оценка параметров возмущающих воздействий на трассах дальней радиосвязи. М., "Радиотехника", 1982, № 9.
15. Тихонов А.Н., Арсении В.А. Методы решения некорректных задач. М., "Наука", 1979.
16. Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Регуляризующие алгоритмы и априорная информация. М., «Наука», 1983.
17. Отчет по НИР "Оптимизация определения параметров возмущающих воздействий на трассах дальней радиосвязи". М., МГУ, 1982, гос. рег. № 81063115.
18. Арефьев В.И., Гордеев В.А., Никонова Л.В., Тихонов В.В., Храмичев А.А. Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн. Патент РФ № 2409821, G01S 13/00.
19. Вертоградов Г.Г. Комплексные исследования ионосферного распространения декаметровых радиоволн на трассах разной протяженности. Дисс. на соиск. степени д-ра физ.-мат. наук: 01.04.03 / Вертоградов Геннадий Георгиевич. Ростов-на-Дону, 2007.
20. Смирнов В.М. Метод мониторинга ионосферы Земли на основе использования навигационных спутниковых систем. Дисс. на соискание ст. д. ф-м наук. М., ФИРЭ РАН, 2007.
21. Барабашов Б.Г., Вертоградов Г.Г. Определение времени стационарности ионосферного радиоканала. М., «Математическое моделирование», 1996, т. 8, № 2.
22. Благовещенский Д.В. Распространение декаметровых радиоволн в высоких широтах. М., "Наука", 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регуляризованного определения оптимальной рабочей частоты при ионосферно-пространственном распространении радиоволн | 2022 |
|
RU2789854C1 |
| Способ регуляризованного обнаружения полезных радиосигналов | 2018 |
|
RU2694235C1 |
| Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн | 2019 |
|
RU2721622C1 |
| Способ адекватного определения текущих интервалов относительной стационарности ионосферно-пространственного распространения радиоволн | 2022 |
|
RU2786622C1 |
| Имитационная модель отдельного радиотехнического узла загоризонтного обнаружения | 2022 |
|
RU2794704C1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2490661C1 |
| СПОСОБ СЛОЖНОСОСТАВНОЙ ОПТИМАЛЬНОЙ ФИЛЬТРАЦИИ ДЛЯ ОБНАРУЖЕНИЯ СЛАБЫХ СИГНАЛОВ | 2012 |
|
RU2518443C2 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
Изобретение относится к области загоризонтной радиолокации (ЗГРЛ), конкретно к способу регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн (ИПРРВ). Способ может быть использован в условиях критического воздействия на прием локационных сигналов ионосферы как нестационарной среды распространения радиоволн (РРВ), всевозможных видов активных и пассивных помех. Техническим результатом является корректное формирование в условиях нестационарного ИПРРВ опорного сигнала регуляризованного обнаружителя и его основных составляющих. В заявленном способе регуляризованного обнаружения (РГО) опорный сигнал (ОПС) загоризонтного радиолокатора (ЗГРЛ) и его основные составляющие – модельные представления пассивных помех  и принятого отклика от Цели
и принятого отклика от Цели  – формируют в начале каждого текущего интервала обработки ТОБР принятых сигналов. На интервале ТОБР, не превышающем интервал Δtст отн относительной стационарности ИПРРВ, опорный сигнал ЗГРЛ и его основные составляющие формируют с требуемым для регуляризации решений РГО с ограничением пространства Z параметров композиции комплекса модельных представлений АПП собственных радиофизических характеристик (РФХ) всех элементов трассы локации – источников пассивных помех ПП, эквивалентной их комплексному мультипликативному воздействию (МП-воздействию) на ЛКС на трассе, до пространства {
– формируют в начале каждого текущего интервала обработки ТОБР принятых сигналов. На интервале ТОБР, не превышающем интервал Δtст отн относительной стационарности ИПРРВ, опорный сигнал ЗГРЛ и его основные составляющие формируют с требуемым для регуляризации решений РГО с ограничением пространства Z параметров композиции комплекса модельных представлений АПП собственных радиофизических характеристик (РФХ) всех элементов трассы локации – источников пассивных помех ПП, эквивалентной их комплексному мультипликативному воздействию (МП-воздействию) на ЛКС на трассе, до пространства { } их допустимых параметров в рамках пространства {Z} их возможных параметров [{}
} их допустимых параметров в рамках пространства {Z} их возможных параметров [{} {Z}]. А также с регуляризующим ограничением пространства Z параметров модельных представлений АЦ собственных РФХ потенциальных Целей, эквивалентных их МП-воздействию на ЛКС на трассе, до пространства {} их допустимых параметров в рамках пространства {Z} их возможных параметров [{}{Z}]. 4 ил.
{Z}]. А также с регуляризующим ограничением пространства Z параметров модельных представлений АЦ собственных РФХ потенциальных Целей, эквивалентных их МП-воздействию на ЛКС на трассе, до пространства {} их допустимых параметров в рамках пространства {Z} их возможных параметров [{}{Z}]. 4 ил.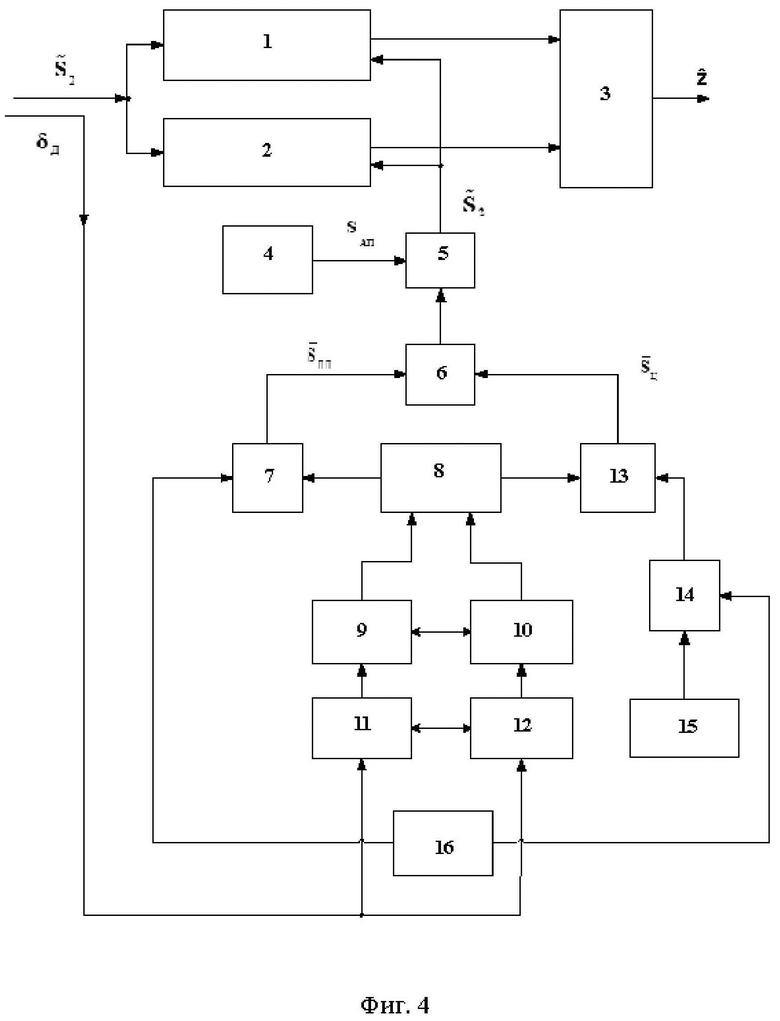
Способ регуляризованного обнаружения (РГО) полезных сигналов (ПС) загоризонтной радиолокации (ЗГРЛ), несущих информацию о Цели, при нестационарном ионосферно-пространственном распространении радиоволн (ИПРРВ), включающий стандартный радиоприем, обработку принятых сигналов  , в процессе которой выполняют вычисление нормированной функциональной невязки ΔI2 между и опорным сигналом
, в процессе которой выполняют вычисление нормированной функциональной невязки ΔI2 между и опорным сигналом  , который формируют как аддитивную смесь модельного представления
, который формируют как аддитивную смесь модельного представления  активных помех (АП) и модельного представления комплекса всех мультипликативных воздействий (МП-воздействий) на локационный сигнал (ЛКС), которое в свою очередь формируют суммированием составляющих опорного сигнала (ОПС): модельного представления
активных помех (АП) и модельного представления комплекса всех мультипликативных воздействий (МП-воздействий) на локационный сигнал (ЛКС), которое в свою очередь формируют суммированием составляющих опорного сигнала (ОПС): модельного представления  пассивных помех (ПП) и модельного представления
пассивных помех (ПП) и модельного представления  принятого отклика от Цели, одновременно с невязкой ΔI2 определяют совокупные погрешности
принятого отклика от Цели, одновременно с невязкой ΔI2 определяют совокупные погрешности  измерений , затем сопоставляют ΔI2 с , далее по критерию нахождения невязки ΔI2 в пределах принимают решение при наличии Цели на радиолокационной трассе (РЛ-трассе) об обнаружении ПС, содержащего интервальные данные [
измерений , затем сопоставляют ΔI2 с , далее по критерию нахождения невязки ΔI2 в пределах принимают решение при наличии Цели на радиолокационной трассе (РЛ-трассе) об обнаружении ПС, содержащего интервальные данные [ ] о допустимых информационных параметрах Цели, вычисляют минимум-экстремум inf ΔI2, принимают регуляризованное решение об оценке местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах их известных интервальных модельных представлений [], отличающийся тем, что в условиях нестационарного ИПРРВ в начале каждого текущего периода ТОБР обработки принятых ЛКС, не превышающего интервал Δtст отн относительной стационарности ИПРРВ, составляющую опорного сигнала - модельное представление пассивных помех формируют в начале каждого текущего периода ТОБР путем свертки зондирующего сигнала (ЗС) с композицией АПП комплекса модельных представлений собственных, не зависящих от сторонних технических воздействий, радиофизических характеристик (РФХ) всех элементов трассы локации - источников пассивных помех (ПП), эквивалентной их общему МП-воздействию на ЛКС на РЛ-трассе, с требуемым для регуляризации решений РГО ограничением пространств Z параметров образующих АПП модельных представлений собственных РФХ всех указанных источников МП-воздействий на ЛКС до пространств {} их допустимых параметров в рамках пространств {Z} их возможных параметров: [{}
] о допустимых информационных параметрах Цели, вычисляют минимум-экстремум inf ΔI2, принимают регуляризованное решение об оценке местоположения и параметров движения Цели по критерию нахождения inf ΔI2 в пределах их известных интервальных модельных представлений [], отличающийся тем, что в условиях нестационарного ИПРРВ в начале каждого текущего периода ТОБР обработки принятых ЛКС, не превышающего интервал Δtст отн относительной стационарности ИПРРВ, составляющую опорного сигнала - модельное представление пассивных помех формируют в начале каждого текущего периода ТОБР путем свертки зондирующего сигнала (ЗС) с композицией АПП комплекса модельных представлений собственных, не зависящих от сторонних технических воздействий, радиофизических характеристик (РФХ) всех элементов трассы локации - источников пассивных помех (ПП), эквивалентной их общему МП-воздействию на ЛКС на РЛ-трассе, с требуемым для регуляризации решений РГО ограничением пространств Z параметров образующих АПП модельных представлений собственных РФХ всех указанных источников МП-воздействий на ЛКС до пространств {} их допустимых параметров в рамках пространств {Z} их возможных параметров: [{}  {Z}], при этом указанное регуляризующее ограничение пространств Z получают, в силу свойств
{Z}], при этом указанное регуляризующее ограничение пространств Z получают, в силу свойств  -функции Дирака, на основе корректных измерений параметров и моделирования с учетом локационной задержки принятых пробных, соответствующих -функции Дирака, сигналов возвратно-наклонного зондирования (ВНЗ/Д-сигналов) в начале каждого текущего, образующего период ТОБР, периода циклического ВНЗ/Д–зондирования РЛ-трасс, которое осуществляют последовательным излучением радиопередатчиком в начале каждого текущего периода ТОБР поочередно двух указанных «пробных» сигналов: квазимонохроматического сигнала «включения» Дƒ и строб-импульса Дτ, что позволяет на каждом текущем интервале ТОБР выполнять регуляризованный перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР параметров образующих АПП модельных представлений собственных РФХ указанных источников МП-воздействий на ЛКС, составляющую опорного сигнала - модельное представление принятого отклика от Цели формируют с учетом локационной задержки в начале каждого текущего периода ТОБР, вслед за приемом ВНЗ/Д-сигналов, путем свертки композиции АПП с результатом предварительной свертки ЗС с модельным представлением АЦ множества задаваемых априори модельных представлений собственных РФХ потенциальных Целей, эквивалентным их общему МП-воздействию на ЛКС, с требуемым для регуляризации решений РГО ограничением пространств Z параметров аддитивно образующих АЦ задаваемых априори известных модельных представлений собственных РФХ потенциальных Целей до пространств {} их допустимых параметров в рамках пространств {Z} их возможных параметров: [{}{Z}], при этом указанное регуляризующее ограничение пространств Z получают в силу свойств -функции Дирака на основе корректных измерений параметров и моделирования принятых пробных ВНЗ/Д-сигналов, что позволяет на каждом текущем интервале ТОБР выполнять регуляризованный перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР параметров образующих АЦ модельных представлений собственных РФХ потенциальных Целей.
-функции Дирака, на основе корректных измерений параметров и моделирования с учетом локационной задержки принятых пробных, соответствующих -функции Дирака, сигналов возвратно-наклонного зондирования (ВНЗ/Д-сигналов) в начале каждого текущего, образующего период ТОБР, периода циклического ВНЗ/Д–зондирования РЛ-трасс, которое осуществляют последовательным излучением радиопередатчиком в начале каждого текущего периода ТОБР поочередно двух указанных «пробных» сигналов: квазимонохроматического сигнала «включения» Дƒ и строб-импульса Дτ, что позволяет на каждом текущем интервале ТОБР выполнять регуляризованный перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР параметров образующих АПП модельных представлений собственных РФХ указанных источников МП-воздействий на ЛКС, составляющую опорного сигнала - модельное представление принятого отклика от Цели формируют с учетом локационной задержки в начале каждого текущего периода ТОБР, вслед за приемом ВНЗ/Д-сигналов, путем свертки композиции АПП с результатом предварительной свертки ЗС с модельным представлением АЦ множества задаваемых априори модельных представлений собственных РФХ потенциальных Целей, эквивалентным их общему МП-воздействию на ЛКС, с требуемым для регуляризации решений РГО ограничением пространств Z параметров аддитивно образующих АЦ задаваемых априори известных модельных представлений собственных РФХ потенциальных Целей до пространств {} их допустимых параметров в рамках пространств {Z} их возможных параметров: [{}{Z}], при этом указанное регуляризующее ограничение пространств Z получают в силу свойств -функции Дирака на основе корректных измерений параметров и моделирования принятых пробных ВНЗ/Д-сигналов, что позволяет на каждом текущем интервале ТОБР выполнять регуляризованный перевод в класс корректности решения обратной задачи определения текущих относительных от такта к такту обработки ТОБР параметров образующих АЦ модельных представлений собственных РФХ потенциальных Целей.
| Способ регуляризованного обнаружения полезных радиосигналов | 2018 |
|
RU2694235C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2009 |
|
RU2409821C2 |
| Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн | 2019 |
|
RU2721622C1 |
| Способ адекватного определения текущих интервалов относительной стационарности ионосферно-пространственного распространения радиоволн | 2022 |
|
RU2786622C1 |
| АКИМОВ В | |||
| Ф., КАЛИНИН Ю | |||
| К., СЛУКИН Г.П | |||
| Проблемы загоризонтного радиолокационного обнаружения и пути их преодоления // Вестник МГТУ им | |||
| Н.Э | |||
| Баумана | |||
| Серия "Приборостроение" | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| КОМБИНИРОВАННАЯ БЛЕСНА "ЗМЕЙКА" | 2003 |
|
RU2253971C2 |
| CN 116400345 A, | |||

