Изобретение относится к области радиотехники и может быть использовано в системах загоризонтной радиолокации (ЗГРЛ), радиозондирования и радиопеленгации, работающих в условиях критического воздействия на прием полезных сигналов (ПС) радиофизических характеристик (РФХ) среды распространения радиоволн (РРВ) и сопутствующих РРВ активных (АП) и пассивных помех (ПП) естественного и искусственного происхождения.
Известны широко применяемые в различных модификациях способы обнаружения полезных радиосигналов (целей/объектов локации) на фоне помех и собственных шумов, реализующие на основе общеизвестных статистических методов корреляционной обработки или согласованной фильтрации с последующим сравнением их результата с порогом отношения сигнал/помехи qП, который назначают в зависимости от конкретной шумовой и помеховой ситуации [1, 2, 3, 4].
Известны многочисленные реализации этих способов, ориентированные на различные частные случаи по условиям функционирования (УСФ) и модификации радиолокационных станций (РЛС).
При этом под УСФ понимается [5, 6] совокупность условий:
- присутствие на трассах локации любой возможной совокупности целей (объектов локации) различных типов (одиночных, групповых различного состава) с переменными характеристиками их движения;
- сложные и многообразные природные радиофизические характеристики (РФХ) среды распространения радиоволн (РРВ), в том числе РФХ рассеивающих, диспергирующих, двоякопреломляющих и нестационарных сред РРВ;
- воздействие на распространяющийся сигнал всех возможных видов возмущающих воздействий (ВВ) естественного и искусственного происхождения.
В свою очередь под ВВ понимаются [5, 6] объекты/явления, не характерные для обычной природной среды трасс локации, такие как: метеорные следы, пролеты самолетов, ракетные старты, перемещающиеся локальные ионосферно/тропосферные неоднородности, которые мультипликативно и специфично воздействуют на прохождение радиосигнала по трассам локации.
Возмущающие воздействия (ВВ), характеризующиеся сдвигами и рассеянием падающей/отраженной электромагнитной волны (ЭМВ), могут быть представлены многомерной функцией S0 (t, f, τ, Θ, …), где t - время, f - частота, τз - задержка,  - ракурс, то есть азимутальный угол между основным направлением распространения ЭМВ и пространственным положением и/или направлением движения ВВ.
- ракурс, то есть азимутальный угол между основным направлением распространения ЭМВ и пространственным положением и/или направлением движения ВВ.
Одной из важнейших проблем радиолокации/зондирования является невозможность адекватного учета воздействия среды РРВ, ВВ и всевозможных видов помех на прием сигналов при использовании традиционных методов обработки сигналов.
Достаточно часто при сложных УСФ наблюдаются произвольно большие потери ΔI полезной информации, то есть, или констатируется невозможность обнаружения полезных сигналов (ПС), содержащих информацию о целях/объектах наблюдения/обнаружения, выделения и идентификации такой информации, или фиксируется отклонение характеристик обнаружения и оценок параметров цели от априори известных или оправданно ожидаемых [1, 4, 7, 8, 9, 11, 12].
Известные принципы обнаружения и функционирования обнаружителей при корреляционном приеме (КРП)/согласованной фильтрации (СГФ) состоят в следующем.
Принятый радиоприемным устройством (РПУ) сигнал в общем случае традиционно моделируется многомерной функцией  (t, g, ƒ, τ3, θпр, …), где t - время, g - излучаемый зондирующий сигнал (ЗС), ƒ - частота, τ3 - задержка, θпр - углы прихода радиоволн в точку приема. Функция является продуктом воздействия на прохождение и прием сигнала в системе «РЛС - среда - цель - среда - РЛС» всех видов мультипликативных помех (МП-воздействий), возмущающих воздействий (в том числе - цели), активных помех (АП) [1, 4, 7, 8, 9, 10, 11].
(t, g, ƒ, τ3, θпр, …), где t - время, g - излучаемый зондирующий сигнал (ЗС), ƒ - частота, τ3 - задержка, θпр - углы прихода радиоволн в точку приема. Функция является продуктом воздействия на прохождение и прием сигнала в системе «РЛС - среда - цель - среда - РЛС» всех видов мультипликативных помех (МП-воздействий), возмущающих воздействий (в том числе - цели), активных помех (АП) [1, 4, 7, 8, 9, 10, 11].
Связь между ЗС и выходным сигналом системы математически описывается интегральным уравнением типа свертки, записываемым в операторном виде [13, 14, 15]:

где:
Ас - интегральный оператор, определяемый передаваемым сигналом и соответствующим ему операндом обработки при приеме,
SП - функция аргумента SЦ - воздействия цели на сигнал на фоне помех.
В любом случае, когда возникает необходимость по результатам измерений принять решение о причинах, их породивших, следует решить классическую обратную задачу. Применительно к системам передачи информации и локации - это задача обнаружения, выделения и распознавания полезного сигнала.
В [13, 14, 15] обосновано, что если несет искомую информацию о воздействии цели на радиолокационный сигнал, который в таком случае является полезным, то ее оценка является решением интегрального уравнения Фредгольма 1 рода типа свертки:

где:
SЦ - функция собственных радиофизических свойств цели;
А-1с - оператор, обратный Ас .
Задача решения таких уравнений называется некорректно поставленной, если нарушено хотя бы одно из этих трех условий Адамара [13, 14, 15].
При решении прикладных задач левая часть уравнения (1) обычно бывает задана приближенно из-за совокупных погрешностей ξ(δ, h) измерений (СВПИ), определяемых в основном помехами (здесь δ и h - параметры, характеризующие, соответственно, случайную δ и систематическую h погрешности измерений  ).
).
Как следствие, задача нахождения характеристик цели по (2) является в общем случае по условиям функционирования (УСФ) некорректно поставленной как из-за неединственности, так и по причине неустойчивости решения этого уравнения [13, 14]. Даже при относительно малых ошибках измерений традиционные способы решений по (2) в общем по УСФ случае неприемлемы, так как в при этом обратный оператор А-1с может либо не существовать, либо не быть непрерывным. Этот вывод подтверждается в [9] операторным функциональным анализом (ФАн) формирования и прохождения сигналов в информационных радиосистемах (ИРС). В [9] показано, что в общем по УСФ случае зондирующий (ЗС) и отраженный от цели сигнал на пути по трассе локации может претерпевать ряд преобразований, приводящих к переводу принимаемого сигнала в совершенно иное, чем ожидаемое по форме ЗС, функциональное пространство.
Такое несоответствие обусловливает принципиальную невозможность обнаружения ПС и выделения искомой информации и/или невосполнимые потери ΔI этой информации при использовании всех известных способов фильтрации и обработки сигналов при приеме, так как задача локации при этом становится не просто обратной, но и некорректно поставленной.
Это подтверждается практикой загоризонтной радиолокации (ЗГРЛ) с использованием известных способов обработки сигналов [4, 12].
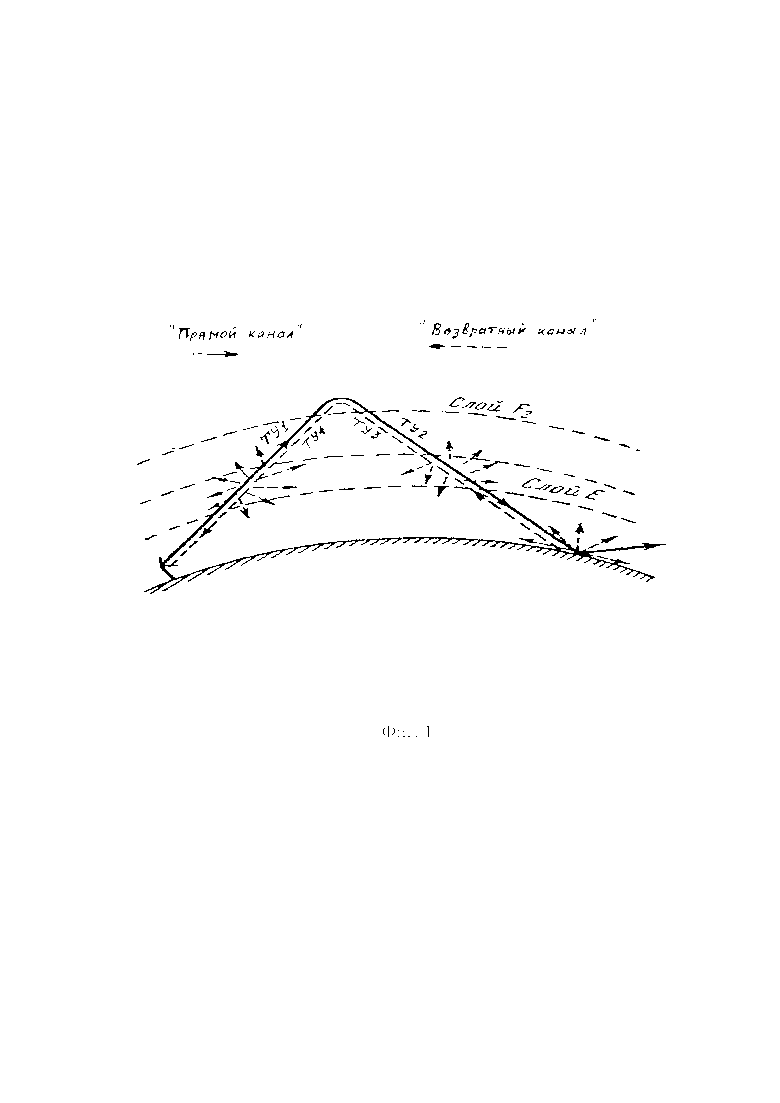
На рисунке (фиг. 1) показана структурно-физическая модель трассы ЗГРЛ с разбиением на условные участки, как наиболее общего и сложного случая по условиям РРВ [9]. Здесь «прямой канал» РЛС - цель - РЛС включает первый участок трассы (ТУ 1) от РЛС до первой области отражения ЭМВ в ионосфере и обратно, второй участок трассы (ТУ 2) от этой области отражения до цели (при ее наличии) и обратно. «Возвратный канал» РЛС - наземное «пятно засветки/отражения» (НПЗ) - РЛС, включает третий участок трассы ТУ 3 от НПЗ до второй области отражения ЭМВ в ионосфере и обратно, четвертый участок трассы ТУ 4 от этой области отражения до РЛС и обратно. Области отражения ЭМВ в ионосфере идентифицированы как первая и вторая в силу того, что могут быть различны как по пространственным параметрам, так и по радиофизическим характеристикам (РФХ).
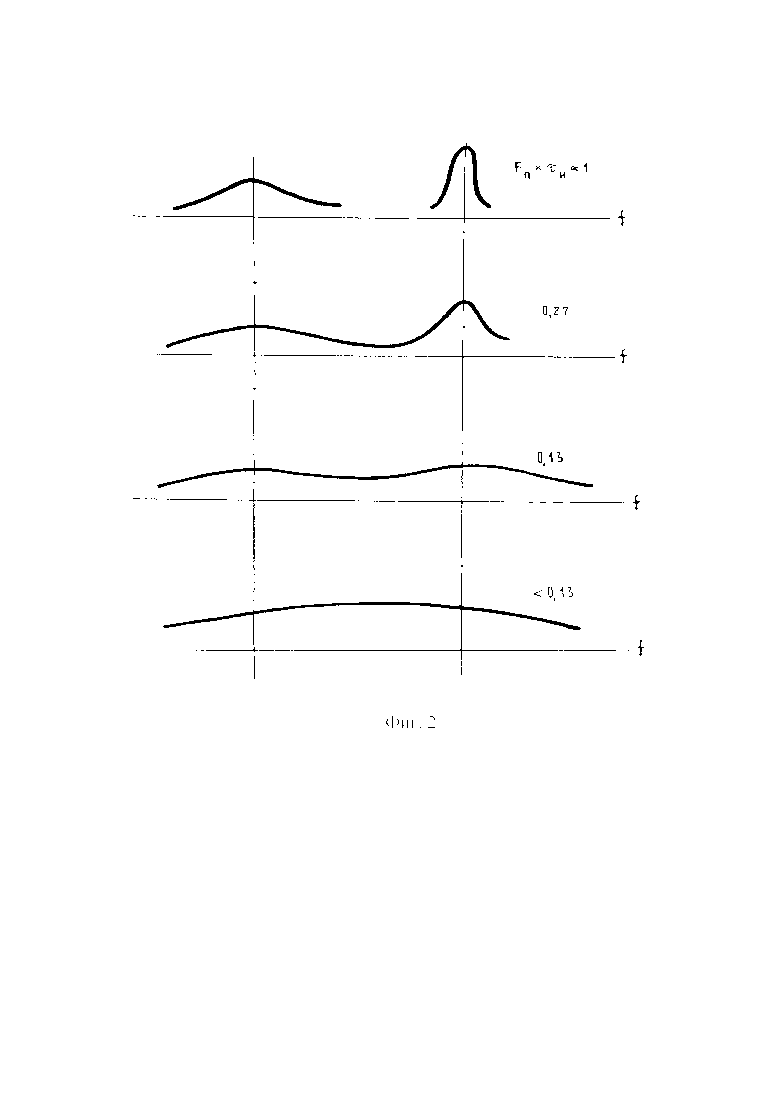
В источниках [8, 15] описаны и на фиг. 2 приведены экспериментальные данные измерений спектра принимаемого сигнала ЗГРЛ методом традиционной фильтрации при различных значениях произведения частоты повторения FП на длительность τИ импульса и известных априори спектральных характеристиках цели, обладающей свойствами рассеяния ЭМВ.
Видно, что собственный спектр цели практически точно отображается при FП×τИ≈1. При FП×τИ < 0.13 наблюдается полное отсутствие однозначной функциональной связи между результатами измерений и априорно точно известными данными. Эта связь имеет место только при FП×τИ > 0.27, то есть - близости формы ЗС к дельта - функции Дирака δД (ƒ–ƒ').
Математически известные способы могут быть представлены алгоритмом [1, 3, 7, 10, 16, 17]:

где  - опорный сигнал,
- опорный сигнал,
⊗ - знак свертки,
qП - пороговое значение отношения сигнал/помехи,
 - искомые информационные характеристики цели.
- искомые информационные характеристики цели.
Согласно выражению (3) для обнаружения и определения выполняют радиоприем, обработку принятого сигнала  , включающую операции вычисления функции взаимной неопределенности (ФВН) путем перемножения принятого сигнала и опорного сигнала
, включающую операции вычисления функции взаимной неопределенности (ФВН) путем перемножения принятого сигнала и опорного сигнала  , интегрирования результата перемножения, сопоставляют максимум ФВН с пороговым значением измеренного отношения сигнал/помехи qП, принимают решение об обнаружении и получают оценки параметров цели при превышении максимумом ФВН текущего значения qП. При этом формируют суммированием сигналов с выходов генератора идеализированной модели отклика от цели и генератора модели помех. Причем модель отклика от цели в известных способах обнаружения в общем случае не адекватна реальным процессам преобразований ЗС на трассах радиолокации. Она всегда функционально соответствует форме ЗС.
, интегрирования результата перемножения, сопоставляют максимум ФВН с пороговым значением измеренного отношения сигнал/помехи qП, принимают решение об обнаружении и получают оценки параметров цели при превышении максимумом ФВН текущего значения qП. При этом формируют суммированием сигналов с выходов генератора идеализированной модели отклика от цели и генератора модели помех. Причем модель отклика от цели в известных способах обнаружения в общем случае не адекватна реальным процессам преобразований ЗС на трассах радиолокации. Она всегда функционально соответствует форме ЗС.
Резюмируя приведенное выше и прочие данные из [1, …17], можно систематизировать основные недостатки известных способов обнаружения следующим образом:
а) Широкий спектр применяемых априори условий и допущений (в различных комбинациях), упрощающих обработку принимаемых сигналов и делающих ее оптимальной только в частных случаях:
- не коррелированность помех и отраженных от цели зондирующих сигналов, то есть - полезных сигналов;
- значительное превышение интервалами существенной корреляции принимаемого ПС по времени Δtск и частоте Δƒск таких же интервалов помех, а также длительности зондирующего сигнала τЗС и его эффективной ширины полосы частот ΔƒЗС соответственно;
- применение метода лучевого приближения, как модели РРВ на трассе локации, для построения алгоритмов обработки сигналов без учета факторов многолучевости и рассеяния радиоволн;
- идентичность по условиям РРВ «прямого» участка трассы локации РЛС - цель - РЛС и «возвратного» участка РЛС - наземное «пятно засветки/отражения» - РЛС (фиг. 2);
- статистическая стационарность принимаемых сигналов, известность законов распределения их параметров.
в) Модель отклика от цели в общем случае не адекватна реальным процессам преобразований ЗС на трассах радиолокации
с) Не адекватность в общем случае по УСФ применяемых статистических методов обработки сигналов комплексу мультипликативных воздействий среды и разнообразных целей на сигнал, что приводит к постановке задачи локации как обратной и некорректно поставленной, к отсутствию однозначной функциональной связи между результатами обработки сигналов и априорно точно известными данными о характеристиках целей [8, 9, 15, 16, 18].
д) Игнорирование в алгоритмах, реализующих общеизвестные корреляционный радиоприем или согласованную фильтрацию, ошибок измерений принятого сигнала ;
е) Принципиальная невозможность в силу недостатков по п.п. «а-д», обнаружения полезных сигналов (ПС), выделения и идентификации информации о цели ЗГРЛ известными способами обнаружения.
Задачей изобретения является решение проблем обнаружения полезных сигналов на основе регуляризованного решения задачи локации, как обратной с введением ее в класс корректно поставленных частных задач, и тем самым - обеспечение возможности обнаружения полезных сигналов, содержащих информацию о местоположении и параметрах движения цели, в многообразных, в том числе самых общих условиях распространения радиоволн (РРВ) в рассеивающих, двоякопреломляющих и диспергирующих РФХ сред РРВ при воздействии на прием всех возможных видов мультипликативных и активных помех, возмущающих воздействий естественного и искусственного происхождения.
Средств и способов решения такой задачи на известном уровне техники не выявлено.
Техническим результатом изобретения - создание нового, не известного ранее, способа регуляризованного обнаружения полезных радиосигналов, обеспечивающего повышение надежности загоризонтного обнаружения местоположения и параметров движения цели/объектов локации в условиях неопределенности трасс распространения радиоволн и радиофизических характеристик (РФХ) приземных слоев атмосферы.
Сущность изобретения.
Достижение заявленного технического результата и решение поставленной технической задачи обеспечивается тем, что способ регуляризованного обнаружения полезных радиолокационных сигналов включает радиоприем сигналов, содержащих информацию о местоположении и параметрах движения цели, преобразование принятых сигналов (ПС) в цифровую форму и обработку цифровых сигналов . В процессе обработки цифровых сигналов . осуществляют одновременное вычисление функциональной невязки ΔI2 между и опорным сигналом  и определение совокупных погрешностей ξ(δ, h) измерений (СВПИ) принятого сигнала.
и определение совокупных погрешностей ξ(δ, h) измерений (СВПИ) принятого сигнала.
Затем проводят сопоставление ΔI2 с ξ(δ, h) и по критерию нахождения невязки ΔI2 в пределах ξ(δ, h) принимают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки  информационных параметров цели.
информационных параметров цели.
Далее вычисляют минимум-экстремум функциональной невязки inf ΔI2 и на этой основе - принимают решение об оценках  местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок .
местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок .
При этом опорный сигнал формируют как аддитивную смесь модельного представления  активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который формируют суммированием модельного представления
активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который формируют суммированием модельного представления  пассивных помех и модельного представления
пассивных помех и модельного представления  отклика от цели.
отклика от цели.
Генерацию модельного представления пассивных помех (ПП), осуществляют следующими последовательными операциями: представление зондирующего сигнала подвергают первой свертке с модельным представлением собственных радиофизических характеристик (РФХ) третьего участка ТУ3 трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объектов/явлений - источников ПП, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ четвертого участка ТУ4 трассы локации.
Генерацию модельного представления отклика от цели осуществляют следующими последовательными операциями: представление ЗС подвергают первой свертке с модельным представлением собственных РФХ первого участка ТУ 1 трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объекта локации с ограничением на основе априорно-экспериментальных данных пространства Z его информационных параметров до пространства допустимых информационных параметров  в рамках пространства возможных информационных параметров {Z}∈Z, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ второго участка (ТУ 2) трассы локации.
в рамках пространства возможных информационных параметров {Z}∈Z, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ второго участка (ТУ 2) трассы локации.
Выполнение описанных действий в их последовательности позволяет в общем случае по УСФ учесть особенности и преодолеть описанные недостатки известных способов обнаружения, реализовать новый способ регуляризованного решения сформулированной задачи радиолокации, как обратной с введением ее в класс корректно поставленных, с обеспечением обнаружения полезных сигналов, содержащих искомую информацию о цели, с одновременным получением оценок ее местоположения и параметров движения в самых общих условиях распространения радиоволн в рассеивающих, двоякопреломляющих и диспергирующих средах при воздействии на прием всех возможных видов мультипликативных и активных помех, возмущающих воздействий естественного и искусственного происхождения.
Указанные новые свойства заявленного способа регуляризованного обнаружения радиосигналов позволяют повысить надежность обнаружения местоположения и параметров движения цели в условиях неопределенности трасс РРВ и РФХ приземных слоев атмосферы при ЗГРЛ и, как следствие, - обеспечить достижение заявленного технического результата и решение поставленной задачи.
Сущность изобретения поясняется чертежами, представленными на фиг. 1-3.
На фиг. 1 - представлена структурно-физическая модель трассы загоризонтной радиолокации (ЗГРЛ) с разбиением трассы прохождения радиосигналов по «прямому» и «возвратному каналу» на участки:
ТУ 1 - первый участок трассы от радиолокационной станции (РЛС) до первой области отражения электромагнитных волн (ЭМВ) в ионосфере и обратно;
ТУ 2 - второй участок трассы от ионосферной области отражения до наземного пятна засветки (НПЗ) цели (при ее наличии) и обратно;
ТУ 3 - третий участок трассы от НПЗ до второй области отражения ЭМВ в ионосфере и обратно;
ТУ 4 - четвертый участок трассы от второй области отражения ЭМВ в ионосфере до РЛС и обратно.
На фиг. 2 - зависимость спектра принимаемого сигнала ЗГРЛ методом традиционной фильтрации от численных значений произведения частоты повторения FП на длительность τИ радиоимпульса при известных априори спектральных характеристиках цели;
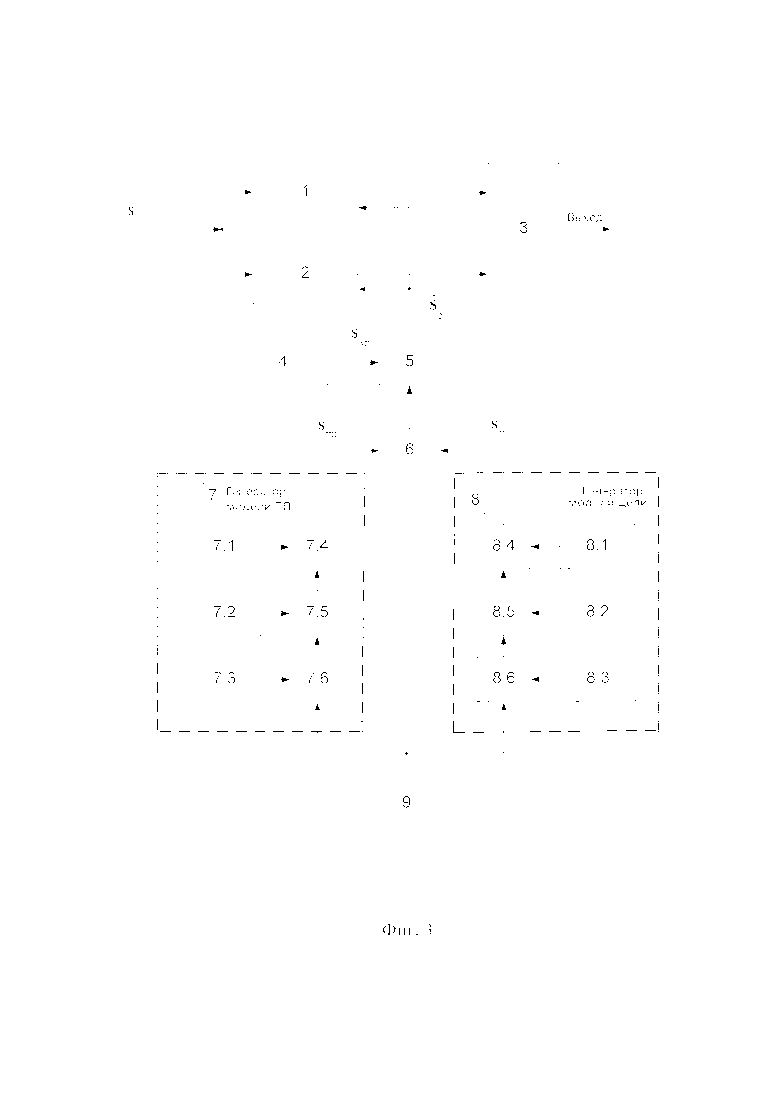
На фиг. 3 - функциональная схема устройства, реализующая предлагаемый способ регуляризованного обнаружения полезных радиосигналов. (радиоприемное устройство стандартного типа на схеме не показано, как предусмотренное по умолчанию).
На фиг. 1-3 позициями обозначены:
1 - блок вычисления функциональной невязки ΔI2 между и адекватно сформированным опорным сигналом ;
2 - блок одновременного с операцией в блоке 1 определения совокупных погрешностей ξ(δ, h) измерений принятых сигналов;
3 - блок сопоставления ΔI2 с ξ(δ, h), выработки решения об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки информационных параметров целей по критерию нахождения невязки ΔI2 в пределах ξ(δ, h), последующего вычисления минимума-экстремума функциональной невязки inf ΔI2 и на этой основе принятия решения об оценках местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок ;
4 - блок генерации модельного представления активных помех (АП);
5 - блок первого сумматора, в котором формируют модельное представление опорного сигнала в виде аддитивной смеси модельного представления активных помех с выхода генератора 4 и модельного представления комплекса МП-воздействий на сигнал с выхода второго сумматора 6,
6 - блок второго сумматора, в котором формируют модельное представление комплекса МП-воздействий на сигнал суммированием модельного представления пассивных помех с выхода узла 7 генерации модели пассивных помех (ПП) и модельного представления отклика от цели с выхода узла 8 генерации модели цели;
7 - узел генерации модели ПП-модельного представления пассивных помех, включающий:
7.1 - блок генерации модельного представления собственных радиофизических характеристик (РФХ) четвертого участка ТУ 4 трассы локации;
7.2 - блок генерации модельного представления собственных РФХ объектов/явлений - источников пассивных помех;
7.3 - блок генерации модельного представления собственных РФХ третьего участка ТУ 3 трассы локации;
7.4 - блок третьей свертки результата второй свертки в узле 7 с модельным представлением собственных РФХ четвертого участка трассы локации,
7.5 - блок второй свертки результата первой свертки в узле 7 с модельным представлением собственных РФХ объектов/явлений - источников пассивных помех;
7.6 - блок первой свертки в узле 7 представления ЗС с модельным представлением собственных РФХ третьего участка трассы локации.
8 - узел генерации модели цели - модельного представления отклика от цели, включающий:
8.1 - блок генерации модельного представления собственных РФХ второго участка ТУ 2 трассы локации;
8.2 - блок генерации модельного представления собственных РФХ объекта локации;
8.3 - блок генерации модельного представления собственных РФХ первого участка ТУ 1 трассы локации;
8.4 - блок третьей свертки результата второй свертки в узле 8 с модельным представлением собственных РФХ второго участка трассы локации;
8.5 - блок второй свертки результата первой свертки в узле 8 с модельным представлением собственных РФХ объекта локации;
8.6 - блок первой свертки в узле 8 представления зондирующего сигнала (ЗС) с модельным представлением собственных РФХ первого участка трассы локации;
9 - блок генерации ЗС.
Согласно фиг. 3 способ регуляризованного обнаружения полезных радиосигналов в части цифровой обработки сигналов ЗГРЛ отображается следующим алгоритмом работы:
где i/j - элементы матрицы классов целей/объектов локации [kц ij],
Δτпр - ограниченная парциальная зона по задержке - элемент многомерной решетки/сетки обзора/контроля РЛС,
 - оценка
- оценка  информационных параметров цели в пределах их регуляризованной интервальной оценки в рамках их допустимых
информационных параметров цели в пределах их регуляризованной интервальной оценки в рамках их допустимых  и возможных {Z} пространств по априорно-экспериментальным данным в пределах совокупных погрешностей ξ(δ, h) измерений принимаемого сигнала,
и возможных {Z} пространств по априорно-экспериментальным данным в пределах совокупных погрешностей ξ(δ, h) измерений принимаемого сигнала,
 - максимум множества
- максимум множества  ,
,
ΔI2 - уклонение в метрике L2 («невязка») функционала принимаемого сигнала , определяемого по Котельникову принятой выборкой, от его модели - опорного сигнала ,
- опорный сигнал, отображающий функциональное преобразование сигнала на трассе радиолокации целью, мультипликативными помеховыми, возмущающими воздействиями и «активными» помехами, порождающий таким образом модель принятого сигнала, определенную в пределах пространства {Z} возможных информационных параметров цели на множестве допустимых информационных параметров  и принимаемую за точное отображение в пределах совокупных погрешностей ξ(δ, h) измерений;
и принимаемую за точное отображение в пределах совокупных погрешностей ξ(δ, h) измерений;
δ и h - параметры, характеризующие, соответственно, случайную δ и систематическую h погрешности измерений .
В соответствии с алгоритмом (4) обнаружения принятый сигнал с выхода радиоприемного устройства (РПУ) с цифровым выходом подают параллельно (фиг. 3) на первые входы блока 1 и блока 2, на вторые входы которых синхронно подают с выхода сумматора 5 опорный сигнал . Блоки 1 и 2 соответственно отождествляют вычисление функциональной невязки ΔI2 между принятым и адекватно сформированным опорным сигналами, определение погрешностей измерений ξ(δ, h) принятого сигнала. Значения невязки ΔI2 с выхода блока 1 и погрешностей измерений ξ(δ, h) с выхода блока 2 поступают синхронно на входы блока 3, где ΔI2 сопоставляют с ξ(δ, h), вырабатывают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки информационных параметров цели (объекта локации) по критерию нахождения невязки ΔI2 в пределах ξ(δ, h). Затем вычисляют минимум-экстремум невязки inf ΔI2 и на этой основе принимают решение об оценках местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок . При этом модельное представление опорного сигнала формируют в блоке 5 - первом сумматоре в виде аддитивной смеси модельного представления активных помех с выхода блока 4 - генератора АП и модельного представления комплекса мультипликативных воздействий на сигнал с выхода второго сумматора 6. Модельное представление комплекса МП-воздействий на сигнал формируют в блоке 6 суммированием модельного представления пассивных помех с выхода узла 7 генерации модели ПП и модельного представления отклика от цели с выхода узла 8 генерации модели цели. Генерацию модели ПП в узле 7 осуществляют следующими последовательными операциями: представление зондирующего сигнала с выхода блока 9 генерации ЗС подвергают в блоке 7.6 первой свертке с модельным представлением собственных РФХ третьего участка ТУ 3 трассы локации с выхода блока 7.3. Результат этой свертки подвергают в блоке 7.5 второй свертке с модельным представлением собственных РФХ объектов/явлений - источников ПП с выхода блока 7.2. Далее результат второй свертки подвергают в блоке 7.4 третьей свертке с модельным представлением собственных РФХ четвертого участка ТУ 4 трассы локации с выхода блока 7.1. Одновременно генерацию модели цели в узле 8 осуществляют следующими последовательными операциями: представление зондирующего сигнала с выхода блока 9 генерации ЗС подвергают в блоке 8.6, одновременно с действиями по свертке в блоке 7.6, первой свертке с модельным представлением собственных РФХ первого участка ТУ 1 трассы локации с выхода блока 8.3. Результат этой свертки подвергают в блоке 8.5 второй свертке с модельным представлением собственных РФХ объекта локации с выхода блока 8.2. Результат второй свертки подвергают в блоке 8.4 третьей свертке с модельным представлением собственных РФХ второго участка ТУ 2 трассы локации с выхода блока 8.1.
Основными факторами, определяющими преимущества предлагаемого способа перед известными являются:
- отсутствие традиционно применяемых априори условий и допущений (в различных комбинациях), делающих известные способы обнаружения и обработки принимаемых сигналов статистическими методами в общем случае по УСФ не адекватными;
- формирование многомерного опорного сигнала (ОПС), в максимально возможной мере соответствующего реальным и самым сложным в общем случае условиям формирования принимаемых сигналов с учетом всего многообразия и последовательности функциональных преобразований сигнала МП-воздействиями на трассах радиолокации;
- генерация на основе известных многочисленных априорно-экспериментальных данных моделей собственных радиофизических характеристик различных участков трасс локации, источников ПП и целей, их применение при формировании ОПС путем нескольких последовательных сверток;
- учет в алгоритмах, реализующих заявляемый способ, ошибок измерений принятого сигнала ;
- применение регуляризованного решения задачи локации, как обратной с введением ее в класс корректно поставленных, и тем самым - обеспечение возможности обнаружения полезных сигналов, содержащих информацию о Цели, с одновременным получением оценок ее местоположения и параметров движения в многообразных, в том числе самых общих, условиях распространения радиоволн в рассеивающих, двоякопреломляющих и диспергирующих средах при воздействии на прием всех возможных видов мультипликативных и активных помех, возмущающих воздействий естественного и искусственного происхождения.
Теоретические исследования заявляемого способа показали, что он обеспечивают в общем по УСФ случае во столько раз меньшие потери информации, чем известные способы обработки, во сколько раз уклонение в L2 применяемых моделей собственных РФХ различных участков трасс локации, источников ПП и целей от реальных представлений в первом случае меньше, чем во втором, ориентированном на идеализированные УСФ.
Эффективность заявляемого способа была проверена ЭВМ-моделированием. Ставилась задача определения по произвольно заданным реализациям частотного спектра принятого сигнала неизвестных исходных спектральных характеристик цели с упрощенным формированием ОПС: модель исходного собственного спектра рассеяния сигнала целью была задана в широком диапазоне его форм и частот, пассивная помеха считалась компенсированной, модель АП задавалась в виде сосредоточенных по частоте помех, приводящих к флуктуациям принимаемого сигнала по уровню на (10-20)% [15]. Результат: произвольно большие ошибки (многократные) восстановления спектральных характеристик цели при согласованной фильтрации, восстановление заявляемым способом - с точностью (5-15)%.
Использованные источники информации:
1. Под ред. М. Сколника. Справочник по радиолокации, т. 1-4, стр. 183-195. Пер. с англ. под общ. ред. К.Н. Трофимова М., "Советское радио", 1976.
2. Абраменков В.В. Структура оптимального измерителя параметров в многосигнальных ситуациях. Авионика 2002-2004 (сб. статей) под ред. А.И. Канащенкова, «Радиотехника», М., 2005 г., стр. 215-217)
3. Миддлтон Д. Многомерное обнаружение и выделение сигналов в случайных средах (David Middleton Multidimensional Detection and Extraction of Signals in Random Media). ТИИЭР, №5, 1970
4. Под ред. Колосова А.А. Основы загоризонтной радиолокации М., "Радио и связь", 1984.
5. Патент RU 2282209, G01S 7/36 (2006.01), G01S 15/00 (2006.01), опубл. 20.08.2006 г., Бюлл. № 23
6. Патент RU 2323452, G01S 13/04, опубл. 27.04.2008 г., Бюлл. № 12
7. Миддлтон Д. Введение в статистическую теорию связи. Перевод с англ. под ред. Б.Р. Левина, М., «Советское радио», т. 1, 1961, т. 2, 1962.
8. Герасимов Ю.С., Гордеев В.А., Кристаль В.С. Оценка параметров возмущающих воздействий на трассах дальней радиосвязи. М., "Радиотехника", 1982, № 9.
9. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Обобщенный функциональный анализ информационных радиосистем Тверь, «Вестник ТвГУ. Серия «Прикладная математика», 2015, № 1
10. Кремер И.Я., Владимиров В.И., Карпухин В.И. Модулирующие (мультипликативные) помехи и прием радиосигналов. М., «Советское радио», 1972.
11. Исимару А. Распространение и рассеяние волн в случайно-неоднородных средах. Перевод с англ. в двух томах М., «Мир», 1981.
12. Алебастров В.А., Борсоев В.А., Шустов Э.И. Развитие отечественной загоризонтной радиолокации. М., «Новое время», 2016.
13. Тихонов А.В., Арсении В.А. Методы решения некорректных задач. М., "Наука", 1979.
14. Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Регуляризующие алгоритмы и априорная информация. М., «Наука», 1983.
15. Отчет по НИР "Оптимизация определения параметров возмущающих воздействий на трассах дальней радиосвязи". М., МГУ, 1982, гос. рег. №81063115.
16. Фалькович С.Е., Хомяков Э.Н. Статистическая теория измерительных радиосистем. М., "Радиосвязь", 1981.
17. Смольский С.М., Филиппов Л.И. Соотношение идеального, оптимального, реального и адаптивного приемников сигналов. М., "Радиотехника", 1999, №5
18. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Оценка качества информационных радиосистем. Тверь, «Вестник ТвГУ. Серия «Прикладная математика», 2015, №2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регуляризованного обнаружения полезных сигналов загоризонтной радиолокации при нестационарном ионосферно-пространственном распространении радиоволн | 2023 |
|
RU2817867C1 |
| Способ регуляризованного определения оптимальной рабочей частоты при ионосферно-пространственном распространении радиоволн | 2022 |
|
RU2789854C1 |
| Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн | 2019 |
|
RU2721622C1 |
| Способ адекватного определения текущих интервалов относительной стационарности ионосферно-пространственного распространения радиоволн | 2022 |
|
RU2786622C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569490C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ОТМЕТОК ЦЕЛЕЙ, ПОЛУЧЕННЫХ ДВУМЯ ПРОСТРАНСТВЕННО-СОВМЕЩЕННЫМИ РЛС | 2017 |
|
RU2668214C2 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
Изобретение относится к области радиотехники и может быть использовано в системах загоризонтной радиолокации (ЗГРЛ), радиозондирования и радиопеленгации. Достигаемый технический результат – повышение надежности загоризонтного обнаружения местоположения и параметров движения цели - объектов локации в условиях неопределенности трасс распространения радиоволн и радиофизических характеристик приземных слоев атмосферы. Способ включает радиоприем сигналов, содержащих информацию о местоположении и параметрах движения цели, преобразование принятых сигналов в цифровую форму и обработку цифровых сигналов  , при этом в процессе обработки цифровых сигналов осуществляют одновременное вычисление функциональной невязки ΔI2 между и опорным сигналом
, при этом в процессе обработки цифровых сигналов осуществляют одновременное вычисление функциональной невязки ΔI2 между и опорным сигналом  и определение совокупных погрешностей ξ (δ, h) измерений принятого сигнала, проводят сопоставление ΔI2 с ξ (δ, h) и по критерию нахождения невязки ΔI2 в пределах ξ (δ, h) принимают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки
и определение совокупных погрешностей ξ (δ, h) измерений принятого сигнала, проводят сопоставление ΔI2 с ξ (δ, h) и по критерию нахождения невязки ΔI2 в пределах ξ (δ, h) принимают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки  информационных параметров цели, затем вычисляют минимум-экстремум функциональной невязки inf ΔI2 и на этой основе принимают решение об оценках
информационных параметров цели, затем вычисляют минимум-экстремум функциональной невязки inf ΔI2 и на этой основе принимают решение об оценках  местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок . 3 з.п. ф-лы, 3 ил.
местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок . 3 з.п. ф-лы, 3 ил.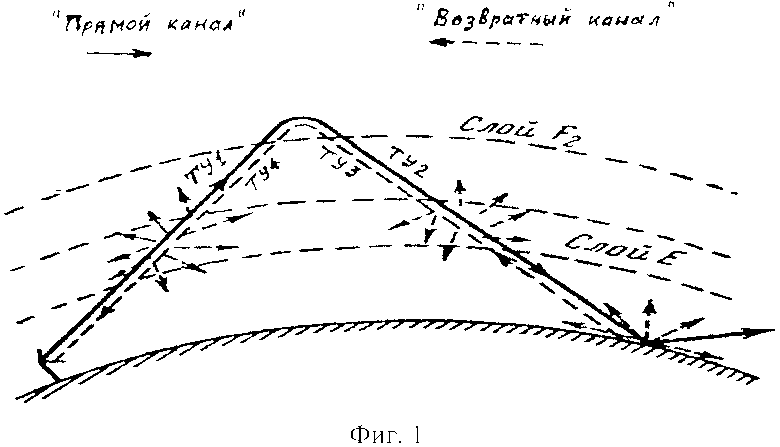
1. Способ регуляризованного обнаружения полезных радиолокационных сигналов, включающий радиоприем сигналов, содержащих информацию о местоположении и параметрах движения цели, преобразование принятых сигналов (ПС) в цифровую форму и обработку цифровых сигналов  , в ходе которой осуществляют одновременно вычисление функциональной невязки ΔI2 между и опорным сигналом
, в ходе которой осуществляют одновременно вычисление функциональной невязки ΔI2 между и опорным сигналом  , определение совокупных погрешностей
, определение совокупных погрешностей  измерений (СВПИ) принятого сигнала, затем - сопоставление ΔI2 с , по критерию нахождения невязки ΔI2 в пределах принимают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки
измерений (СВПИ) принятого сигнала, затем - сопоставление ΔI2 с , по критерию нахождения невязки ΔI2 в пределах принимают решение об обнаружении полезных сигналов, содержащих регуляризованные интервальные оценки  информационных параметров цели, далее вычисляют минимум-экстремум функциональной невязки inf ΔI2 и на этой основе принимают решение об оценках
информационных параметров цели, далее вычисляют минимум-экстремум функциональной невязки inf ΔI2 и на этой основе принимают решение об оценках  местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок .
местоположения и параметров движения цели по критерию нахождения inf ΔI2 в пределах интервальных оценок .
2. Способ по п. 1, отличающийся тем, что опорный сигнал формируют как аддитивную смесь модельного представления  активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который в свою очередь формируют суммированием модельного представления
активных помех и модельного представления комплекса мультипликативных воздействий на сигнал, который в свою очередь формируют суммированием модельного представления  пассивных помех и модельного представления
пассивных помех и модельного представления  отклика от цели.
отклика от цели.
3. Способ по п. 2, отличающийся тем, что генерацию модельного представления пассивных помех (ПП) осуществляют путем свертки зондирующего сигнала (ЗС) с модельным представлением собственных радиофизических характеристик (РФХ) третьего участка (ТУ3) трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объектов/явлений - источников ПП, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ четвертого участка (ТУ4) трассы локации.
4. Способ по п. 2, отличающийся тем, что генерацию модельного представления отклика от цели осуществляют путем свертки ЗС с модельным представлением собственных РФХ первого участка (ТУ1) трассы локации, результат этой свертки подвергают второй свертке с модельным представлением собственных РФХ объекта локации с ограничением на основе априорно-экспериментальных данных пространства Z его информационных параметров до пространства допустимых информационных параметров  в рамках пространства возможных информационных параметров {Z}∈Z, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ второго участка (ТУ2) трассы локации.
в рамках пространства возможных информационных параметров {Z}∈Z, результат второй свертки подвергают третьей свертке с модельным представлением собственных РФХ второго участка (ТУ2) трассы локации.
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 2005 |
|
RU2286583C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ НЕСКОЛЬКИХ ОБЪЕКТОВ В МНОГОКАНАЛЬНЫХ ДОПЛЕРОВСКИХ РЛС | 2008 |
|
RU2373551C1 |
| СПОСОБ МНОГОСИГНАЛЬНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2382379C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2284548C1 |
| ЦИФРОВОЙ МНОГОИТЕРАЦИОНАЛЬНЫЙ ФИЛЬТР | 2011 |
|
RU2452080C1 |
| US 6131296 A, 17.10.2000 | |||
| US 9713012 B2, 18.07.2017 | |||
| FR 2890450 A1, 09.03.2007 | |||
| CN 103399315 A, 20.11.2013. | |||

