Изобретение относится к устройствам, обеспечивающим снижение магнитного поля объектов морской техники, и может быть использовано для судов, предназначенных для геомагнитной съемки в районах, где отсутствуют стационарные магнитные стенды.
Известны маневренные стенды для измерения и настройки магнитного поля надводного (подводного) объекта указанные в публикации «Развитие стендов для контроля магнитного состояния кораблей», Труды второй международной конференции по судостроению - ISC 98, С-Пб, 1998 г. В.И. Большаков, В.А. Нарчев, В.В. Нестеров, Ю.П. Обоишев, СП. Сазонов, Н.М. Семенов
Для измерения магнитного поля таких судов и его настройки в заданном районе акватории на грунте оперативно устанавливается маневренный стенд.
При этом используется вспомогательное судно, обеспечивающее доставку маневренного стенда и его установку на грунте.
Установив датчики магнитного поля, вспомогательное судно удаляется на расстояние, обеспечивающее незначительное влияние его собственного магнитного поля на результаты измерений поля контролируемого судна.
Недостатками известных технических решений является недостаточная точность измерения магнитного поля объекта на мобильных стендах подобного типа из-за отсутствия средств координатной привязки местоположения датчиков магнитного поля, установленных на грунте, к объекту измерения, что приводит к неточности измерения магнитного поля объекта морской техники.
Известен маневренный стенд для измерения и настройки магнитного поля надводного (подводного) объекта, указанный в патенте РФ №2551412 от 30.12.2013 (М.В. Фомичев, О.Е. Мендельсон, Д.А. Майоров «Маневренный стенд для измерения и настройки магнитного поля надводного (подводного) объекта») - принятый за прототип.
В известном техническом решении указан маневренный стенд, оперативно устанавливаемый в необорудованном районе акватории для измерения и настройки магнитного поля объектов морской техники, содержащий опускаемую со вспомогательного судна на грунт платформу, которая доставляется этим судном в заданный район акватории и устанавливается на грунте в требуемом положении с помощью дистанционно управляемых домкратов.
На этой платформе расположена поворачиваемая на задаваемый угол балка с установленными на ней измерительными датчиками магнитного поля и устройствами, которые позволяют определять координаты датчиков и передавать сигналы от установленных устройств на стенд или объект.
Точность измерений, производимых на мобильном стенде, в значительной степени зависит от точности определения взаиморасположения датчиков и контролируемого объекта морской техники в моменты осуществления измерений, при проходе объекта над измерительными датчиками.
Координаты объекта и его пространственное расположение определяются с помощью аппаратуры спутниковой навигации, установленной на этом объекте.
Координаты каждого из датчиков магнитного поля мобильного стенда определяются с учетом места установки платформы на грунте и места их размещения на этой платформе.
Положение балки определяется по лучам лазерных излучателей после установки платформы на грунте и уточняется сигналами, поступающими от датчиков углового поворота балки.
В процессе измерения и настройки магнитного поля контролируемого объекта, производимых в течение достаточно длительного времени, под влиянием воздействия различных факторов, главным из которых является мощное гидродинамическое давление на платформу с измерительными датчиками, создаваемое движущимся судном, пространственное положение платформы может непредсказуемо измениться, что будет является причиной возникновения дополнительной погрешности, снижающей точность измерений.
Существенным недостатком прототипа является то, что имеющаяся возможность уточнения местоположения платформы после каждого прохода судна приводит к значительному увеличению трудоемкости работ, снижению точности расчета магнитного поля объекта морской техники и, как следствие, ухудшению качества настройки его требуемого значения.
Задачей изобретения является повышение точности измерения магнитного поля объекта морской техники на мобильном стенде за счет снижения дополнительной погрешности, вызванной неточностью определения взаиморасположения измеряемого объекта и датчиков магнитного поля, а также снижение трудоемкости проведения измерений и повышение качества настройки его требуемого значения.
Поставленная задача решается благодаря тому, что в маневренном стенде для измерения и настройки магнитного поля объектов морской техники, предусмотрены следующие отличия, а именно, дополнительно введены:
- телеуправляемый необитаемый подводный аппарат с установленными на нем измерительными датчиками магнитного поля, перемещающийся по сетке точек измерения под неподвижно стоящим объектом измерений;
- приемный, излучающий и надводный модули устройства определения координат;
надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения;
- подводный и надводный соединительные кабели.
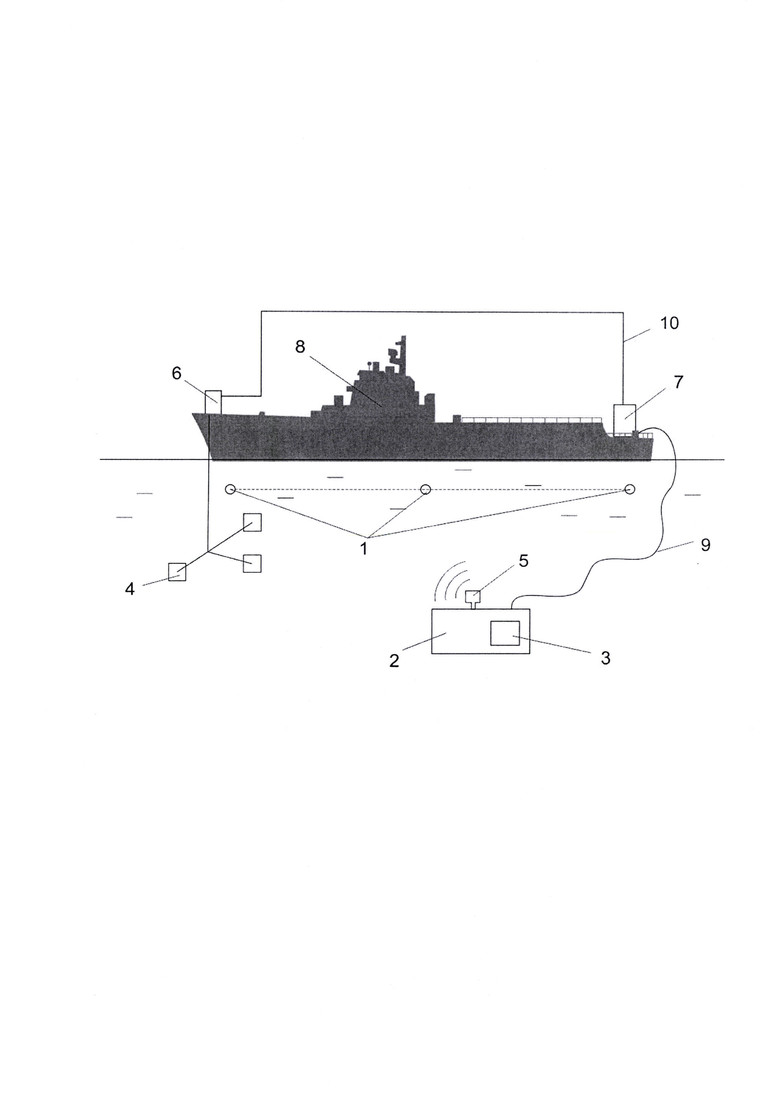
Сущность изобретения поясняется чертежом, где схематически представлены:
1 - сетка точек измерения
2 - телеуправляемый необитаемый подводный аппарат;
3 - измерительные датчики магнитного поля;
4 - приемный модуль устройства определения координат;
5 - излучающий модуль устройства определения координат;
6 - надводный модуль устройства определения координат;
7 - надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения;
8 - объект морской техники;
9 - подводный соединительный кабель;
10 - надводный соединительный кабель.
Маневренный стенд для измерения и настройки магнитного поля объектов морской техники расположен на исследуемом объекте (измерений) морской техники (8) и содержит телеуправляемый необитаемый подводный аппарат (2), на котором установлены измерительные датчики (3) магнитного поля, устройство определения координат, рассчитывающее координаты местоположения подводного аппарата (2) относительно объекта измерений (8) и содержащее установленный на подводном аппарате (2) излучающий модуль (5) устройства определения координат, приемный модуль (4) устройства определения координат, надводный модуль (6) устройства определения координат, соединенный надводным соединительным кабелем (10) с надводным модулем (7) управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерений. Связь модуля (7) с подводным аппаратом (2) осуществляется по подводному соединительному кабелю (9).
Последовательность действий по измерению и настройке магнитного поля объекта измерений заключается в следующем.
Исследуемый объект измерений (8), оборудованный размагничивающим устройством (на чертеже не показано), устанавливается на швартовные бочки (на чертеже не показано) в акватории обеспечивающей минимально возможные перемещения объекта измерений (8) за счет ветра и подводных течений.
С исследуемого объекта измерений (8) в воду опускаются приемный модуль (4) и подводный аппарат (2).
До начала измерений магнитного поля исследуемого объекта измерений (8), подводный аппарат (2) передает сигналы о своем местоположении через излучающее устройство (5) на приемные устройства (4) передающие в свою очередь сигналы на надводный модуль (6), который определяет местоположение подводного аппарата (2) относительно объекта измерений (8).
Надводный модуль (6) на основании полученных данных формирует сигналы управления, несущие информацию о пространственном положении подводного аппарата (2) относительно объекта измерений (8) и передает их по надводному соединительному кабелю (10) на надводный модуль (7), который, в свою очередь, формирует и через подводный соединительный кабель (9) передает на подводный аппарат (2) программу его движения по сетке точек измерения (1), которая заранее задается проектантами корабля.
В каждой из точек (1) подводный аппарат (2) зависает и, с помощью измерительных датчиков (3) магнитного поля, проводит измерение составляющих магнитного поля объекта морской техники (8). Таким образом, формируется пакет данных с информацией о величине магнитного поля объекта морской техники (8), что дает возможность рассчитать величины токов компенсационных обмоток бортового размагничивающего устройства (на чертеже не показано), установка которых приведет к возникновению противоположно направленного компенсационного магнитного поля, что приведет к снижению первоначального магнитного поля объекта морской техники (8) до требуемого значения.
Таким образом, за счет исключения гидродинамического воздействия проходящего объекта на положение датчиков магнитного поля, а также возможности корректировки изменений положения телеуправляемого необитаемого подводного аппарата относительно, привязанной к объекту морской техники, сетки точек измерения, возникающих из-за перемещений объекта морской техники, обусловленных ветром и подводными течениями, повышается точность измерений магнитного поля объекта морской техники на мобильном стенде, и, как следствие, повышается качество настройки магнитного поля объекта морской техники до требуемого значения.
За счет использования предлагаемого технического решения значительно снижается трудоемкость работ, что выгодно отличает его от прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| МАНЕВРЕННЫЙ СТЕНД ДЛЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОГО ПОЛЯ ОБЪЕКТОВ МОРСКОЙ ТЕХНИКИ | 2016 |
|
RU2619481C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| МАНЕВРЕННЫЙ СТЕНД ДЛЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОГО ПОЛЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО ОБЪЕКТА | 2013 |
|
RU2551412C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
Изобретение относится к устройствам, обеспечивающим снижение магнитного поля объектов морской техники. Маневренный стенд для измерения и настройки магнитного поля объектов морской техники содержит устанавливаемые на объекте морской техники надводный модуль устройства определения координат и надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения, соединенные надводным соединительным кабелем. Надводный модуль устройства определения координат соединен с размещенным под водой приемным модулем устройства определения координат. Надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения соединен посредством подводного соединительного кабеля с телеуправляемым необитаемым подводным аппаратом, выполнен с возможностью перемещения под водой по сетке точек измерения под неподвижно стоящим объектом измерений. Телеуправляемый необитаемый подводный аппарат содержит измерительные датчики магнитного поля и излучающий модуль устройства определения координат. Достигается повышение точности измерения магнитного поля объекта морской техники на мобильном стенде, а также повышение качества настройки его магнитного поля до требуемого значения. 1 ил.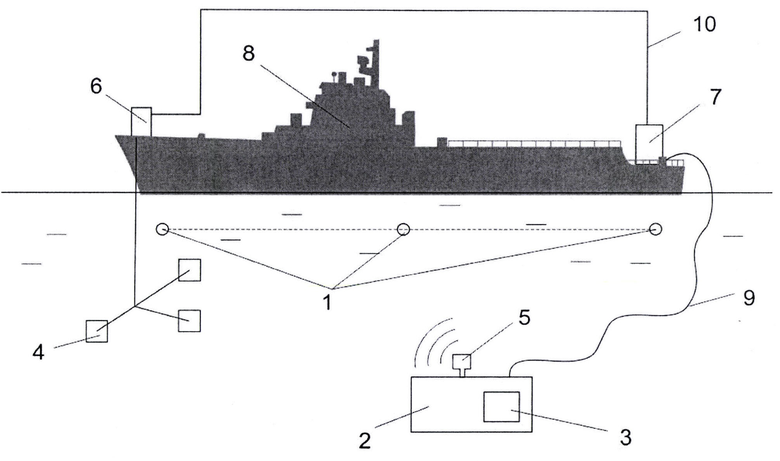
Маневренный стенд для измерения и настройки магнитного поля объектов морской техники, содержащий устанавливаемые на объекте морской техники надводный модуль устройства определения координат и надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения, соединенные надводным соединительным кабелем, при этом надводный модуль устройства определения координат соединен с размещенным под водой приемным модулем устройства определения координат, а надводный модуль управления движением телеуправляемого необитаемого подводного аппарата и приема данных измерения соединен посредством подводного соединительного кабеля с телеуправляемым необитаемым подводным аппаратом, выполнен с возможностью перемещения под водой по сетке точек измерения под неподвижно стоящим объектом измерений, при этом телеуправляемый необитаемый подводный аппарат содержит измерительные датчики магнитного поля и излучающий модуль устройства определения координат.
| МАНЕВРЕННЫЙ СТЕНД ДЛЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОГО ПОЛЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО ОБЪЕКТА | 2013 |
|
RU2551412C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2488963C1 |
| СПОСОБЫ ИЗГОТОВЛЕНИЯ МЕДНО-ФОСФОРИСТОГО СПЛАВА | 1999 |
|
RU2177511C2 |
| СПОСОБ ПРИВЕДЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ МАГНИТНОГО ПОЛЯ ЛИНЕЙНЫМ СТЕНДОМ К СИСТЕМЕ КООРДИНАТ ОБЪЕКТА | 1996 |
|
RU2142143C1 |

