Изобретение относится к способам и устройствам для измерения магнитных и электрических полей, создаваемых ферромагнитными объектами и может быть применено для определения магнитного состояния морских и речных судов, подводных объектов, контроля и обнаружения дефектов трубопроводов, в том числе проложенных под водой, геологоразведки и определения границ месторождений полезных ископаемых и т.д. [H01F 13/00, B63G 9/00, B63G 9/06, G01R 33/02].
Из уровня техники известен СПОСОБ ПРИВЕДЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ МАГНИТНОГО ПОЛЯ ЛИНЕЙНЫМ СТЕНДОМ К СИСТЕМЕ КООРДИНАТ ОБЪЕКТА [RU 2142143 C1, опубл.: 27.11.1999], состоящий в том, что определяют расстояния до крайних измерительных датчиков, для движущегося исследуемого корабля с помощью измерительных датчиков регистрируют измерения его магнитного поля, оптическим дальномером определяют положение исследуемого корабля, вычисляют длину пути исследуемого корабля и производят пересчет результатов измерений магнитного поля измерительными датчиками в систему координат исследуемого корабля, отличающийся тем, что до начала равномерного движения исследуемого корабля гиротеодолитом устанавливают систему координат входящего в состав линейного стенда корабля-носителя S-N и O-W, расстояния до крайних измерительных датчиков определяют акустическими дальномерами относительно двух размещенных на оси O-W точек корабля-носителя, гиротеодолитом определяют угол между направлением на дальнюю от корабля-носителя веху стенда и осью O-W, оптическим дальномером, направленным на отражатель и установленным в носовой части корабля-носителя, устанавливают момент пересечения исследуемым кораблем оси O-W в первой точке и определяют координату этой точки на оси O-W, затем определяют момент пересечения исследуемым кораблем направления на дальнюю веху во второй точке и расстояние этой точки от начала координат корабля-носителя, по полученным данным определяют длину линейного стенда путем вычисления расстояния между крайними измерительными датчиками, вычисляют координаты центра линии стенда - третьей точки, координаты второй точки, длину пути исследуемого корабля между первой и второй точками, скорость и угол курса исследуемого корабля, координаты
точки пересечения исследуемым кораблем линии стенда - четвертой точки, расстояние между третьей и четвертой точками, отклонение линии стенда от направления O-W, длину исследуемого корабля, при этом результаты измерений магнитного поля исследуемого корабля регистрируют, начиная с момента прихода корабля во вторую точку до момента прохождения кораблем удвоенного расстояния между второй и четвертой точками, а пересчет результатов измерений производят, используя полученные массивы данных, с помощью интерполяционных полиномов.
Также известно УСТРОЙСТВО И СПОСОБ АНАЛИЗА ХАРАКТЕРИСТИКИ МАГНИТНОГО ПОЛЯ ВОЕННОМ-МОРСКОГО СУДНА [KR20110035413 (A), опубл.: 06.04.2011] с использованием устройства для анализа характеристик магнитного поля, включающего в себя блок измерения сигнала, блок предварительной обработки, блок решения обратной задачи и блок постобработки, включающий:
а) измерение сигнала магнитного поля, генерируемого судном, для этого устанавливают множество магнитных датчиков для измерения магнитного поля на определенной глубине;
b) измерение магнитного поля путем приема сигнала обнаружения от магнитного датчика в соответствии с относительным расстоянием разноса между магнитным датчиком и судном, когда судно движется по заданной траектории;
c) разделение поверхности корпуса судна на множество элементов поверхности блоком предварительной обработки для распределения магнитной нагрузки, которая является источником магнитного поля, на поверхности корпуса судна в дискретной форме;
d) по магнитному полю корабля, измеренного блоком измерения сигналов, и информации о форме корабля, разделенной препроцессором на множество элементов поверхности, блок решения обратной задачи используя метод обратной задачи по величине магнитной нагрузки, распределенной в узлах каждого элемента стороны судна;
е) вычисление величины сигнала магнитного поля в произвольном положении судна блоком постобработки из распределения магнитной нагрузки на поверхность корпуса, полученного на основе решения обратной задачи блоком решения обратной задачи.
Известна ПОРТАТИВНАЯ СТАНЦИЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОЙ ПОДПИСИ ВОЕННОГО КОРАБЛЯ [GB2488963 (A), опубл.: 19.09.2021], включающая петли магнитной иммунизации, содержащая не менее двух измерительных наборов, предназначенных для развертывания в море по обе стороны от военного корабля, причем каждый
измерительный набор включает не менее двух магнитных датчиков, расположенных вертикально, один над другим в каждом случае, и средства для передачи измерений, военно-морской корабль снабжен средствами для приема измерений и средствами вычисления теоретического магнитного поля, вычислительные средства содержат магнитную модель военного корабля позволяющий вычислить магнитное поле, излучаемое под военным кораблем.
Наиболее близким является УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ СИГНАТУРЫ ВОЕННОГО КОРАБЛЯ И ЕГО ПРИМЕНЕНИЕ ДЛЯ НАСТРОЙКИ МАГНИТНОЙ ИММУНИЗАЦИИ [FR2704065 (A1), опубл.: 21.10.1994], содержащее по крайней мере один магнитный датчик, предназначенный для измерения магнитного поля, отличающееся тем, что в нем используется устройство, буксируемое военным судном, в качестве платформы для магнитного датчика, причем этот магнитный датчик размещают во время измерения на расстоянии, на котором он чувствителен к магнитному полю, характерному для военного корабля, при этом информация, собранная датчиком, передается на борт военного корабля, магнитная модель которого предопределена.
Основным недостатком прототипа является то, что используемые для измерений поля трехкомпонентные магнитометры используются как поисковые, детектирующие аномалию поля без особых требований по точности. Любой компонентный (векторный) магнитометр требует высокоточного углового позиционирования и любые пространственные колебания датчика (ввиду температурных и физических нестабильностей векторных магнитных датчиков, вытекающих из макроскопических свойств магнитных материалов, а также случайных ветровых нагрузок, морских течений и пр.) приводят к случайным ошибкам и снижению точности и достоверности измерений сигнатуры корабля. Кроме того, использование одного или более магнитных датчиков, трёхкомпонентных магниторезистивных интегрального исполнения или феррозондовых, при этом измеряется градиент магнитного поля в пространстве, ограниченном размерами датчика. Это приводит к низкой чувствительности прибора. Известно, что при стягивании измеряемого градиента в точку результат измерения стремится к нулю, а увеличение градиента увеличивает чувствительность прибора. При низкой чувствительности датчиков требуется приближение к объекту измерения на короткое расстояние, в этом случае все точки излучения магнитного поля, учитывая их хаотичность расположения и разно удаленность. создают большую нелинейность сигнала, что приводит нарастанию ошибок измерения.
Другим недостатком является критичность измерений к пространственной ориентации объекта. Измерение множества векторных значений магнитного поля при разных угловых направлениях по отношению к вектору магнитного поля земли ведёт к накоплению систематической погрешности результатов измерений и неточному построению сигнатуры объекта.
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в повышении точности, информативности и достоверности результатов измерений сигнатуры объекта.
Указанный технический результат достигается за счет того, что способ контроля магнитного состояния объектов, характеризующийся измерением магнитного поля контролируемого объекта, отличающийся тем, что измерения магнитного поля контролируемого объекта осуществляют с подвижной платформы, движущейся по запланированным вдоль объекта точкам маршрута с учетом скорости движения объекта, в каждой из i-точек маршрута движения платформы определяют ее положение и положение объекта и регистрируют с помощью магнитных датчиков градиенты постоянного и переменного магнитных полей объекта и их ортогональные проекции на оси прямоугольной системы координат в текущий момент времени Ti, измеренные величины в виде цифрового сигнала передают в блок управления, где вычисляют среднеквадратические значения градиентов магнитного поля и расстояния от объекта до платформы Li для каждой из i-точек маршрута в момент времени Ti и определяют скорость изменения скалярных и векторных значений градиентов магнитного поля, по величине градиентов и скорости их изменения определяют аномальную намагниченность объекта.
В частности, управление платформой осуществляют в автоматическом режиме.
В частности, управление платформой осуществляют вручную.
В частности, движение платформы осуществляют в верхней полусфере объекта.
В частности, движение платформы осуществляют в нижней полусфере объекта.
В частности, расстояние от объекта до платформы определяют решением обратной геодезической задачи.
Указанный технический результат достигается за счет того, что устройство контроля магнитного состояния объектов, содержащая платформу с размещенными на ней магнитными датчиками, отличающаяся тем, что дополнительно содержит блок управления, включающий в себя модуль управления и контроля устройством с подключенными к нему модулями регистрации, обработки и отображения обработанной информации от магнитных датчиков, а также модуль удаленного управления платформой,
платформа выполнена подвижной и содержит размещенные на ней магнитные датчики, подключенные к контроллеру, к контроллеру также подключены модуль видовой информации и приводы управления движением платформы, контроллер платформы соединен с модулем управления и контроля посредством модулей связи, к модулю управления и контроля и контроллеру платформы подключены модули привязки.
В частности, модуль управления и контроля выполнен в виде ПЭВМ.
В частности, модуль отображения видеоинформации выполнен в виде, как минимум, одного монитора (экрана).
В частности, модуль привязки выполнен в виде GNSS приемника для определения текущих координат платформы и объекта и обеспечения позиционирования платформы при контроле магнитного состояния объекта.
В частности, платформа выполнена в виде беспилотного воздушного судна.
В частности, платформа выполнена в виде необитаемого подводного аппарата.
В частности, платформа выполнена в виде надводного автономного судна.
В частности, платформа выполнена в виде робомобиля.
В частности, магнитные датчики выполнены в виде трехкомпонентного феррозондового градиентометра.
В частности, модуль видовой информации выполнен в виде фото-, видеокамер для получения окружающей платформу обстановки.
Краткое описание чертежей.
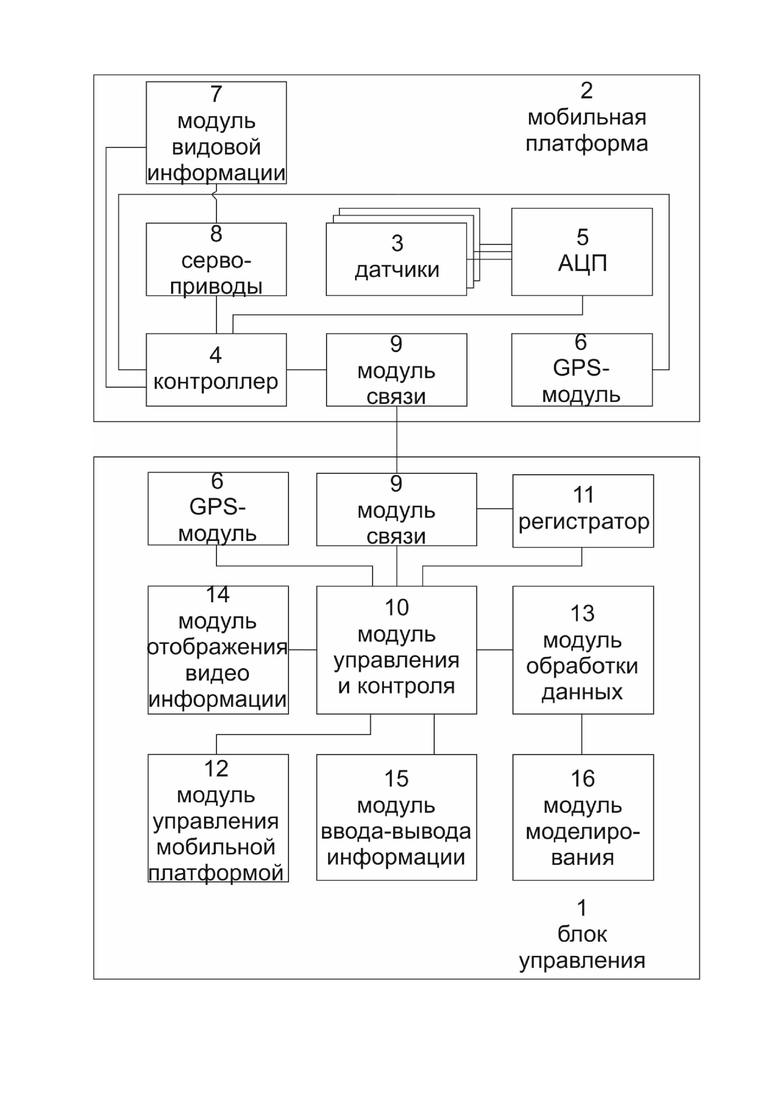
На фигуре обозначено: 1 – блок управления, 2 – мобильная платформа, 3 – первичные датчики, 4 – контроллер, 5 – аналого-цифровой преобразователь, 6 – модули привязки, 7 – модуль видовой информации, 8 – сервоприводы, 9 – модули связи, 10 – модуль управления и контроля, 11 – регистратор, 12 – модуль управления мобильной платформой, 13 – модуль обработки данных, 14 – модуль отображения видеоинформации, 15 – модуль ввода-вывода информации, 16 – модуль моделирования.
Осуществление изобретения.
Устройство контроля магнитного состояния объекта содержит блок управления 1 и подключенный к нему измерительный комплекс, выполненный на базе мобильной платформы 2, например, в виде беспилотного воздушного судна (дрон, БПЛА и т.д.), необитаемого подводного аппарата, надводного автономного судна или робомобиля.
Мобильная платформа 2 содержит каркас (несущую раму), носитель (на фигурах не показан), создающий подъемную силу в варианте реализации мобильной платформы 2 в виде беспилотного воздушного судна, поддерживающий указанное судно в воздухе или движители и блоки обеспечения плавучести в варианте реализации мобильной платформы 2 в виде необитаемого подводного аппарата или надводного автономного судна или двигатель, приводящий во вращение колеса (гусеницы) в варианте реализации мобильной платформы 2 в виде робомобиля (беспилотного автомобиля).
На мобильной платформе 2 смонтированы первичные датчики 3 и контроллер 4. Первичные датчики 3 выполнены в виде магнитометров, например, в виде трехкомпонентного феррозондового градиентометра, содержащего три пары трехкомпонентных магнитных датчиков, каждая пара их которых является источником сигнала компоненты градиента и двух значений модули индукции магнитного поля объекта или в виде датчиков напряженности электрического поля. Датчики 3 подключены к аналого-цифровому преобразователю 5, который соединен с контроллером 4.
К контроллеру 4 подключены модуль привязки 6, модуль видовой информации 7, сервоприводы 8 управления элементами носителя (движительным комплексом и блоками обеспечения плавучести) и модуль связи 9.
Модуль привязки 6 выполнен с возможностью высокоточной привязки к спутниковой системе навигации (GNSS), например, GPS, GLONASS для определения текущих координат мобильной платформы 2 и обеспечения ее позиционирования при выполнении задания.
Модуль видовой информации 7 выполнен в виде фото-, видеокамеры, предназначенной для получения окружающей мобильную платформу 2 обстановки.
Мобильная платформа 2 с помощью модуля связи 9 соединена с модулем связи 9 блока управления 1. Модули связи 9 выполнены в виде беспроводных радиомодулей с возможностью организации обмена информации блока управления 1 и мобильной платформы 2.
Блок управления 1 содержит модуль управления и контроля 10, соединенный с упомянутым выше модулем связи 9, к которому также подключен регистратор 11 сигналов от первичных датчиков 3. Регистратор 11 соединен с модулем управления и контроля 10.
К модулю управления и контроля 10 подключены модуль привязки 6, модуль управления мобильной платформой 12, модуль обработки данных 13 регистрации сигналов от
первичных датчиков 3, модуль отображения видеоинформации 14 и модуль ввода-вывода информации 15. К модулю обработки данных 13 подключен модуль моделирования 16.
Модуль управления и контроля 10 выполнен в виде ПЭВМ.
Модуль отображения видеоинформации 14 выполнен в виде, как минимум, одного монитора (экрана).
Устройство контроля магнитного состояния объектов используют следующим образом.
Блок управления 1 размещают на обследуемом объекте или вблизи него.
Перед запуском мобильной платформы 2 определяют координаты местоположения объекта ХА0, YA0, ZA0 и записывают полученные значения в модуль управления и контроля 10, при этом при размещении блока управления и контроля 1 непосредственно на объекте координаты ХА0, YA0, ZA0 определяют с помощью модуля привязки 6 блока управления 1. С помощью модуля привязки 6 мобильной платформы 2 определяют координаты ее местоположения и записывают полученные значения в контроллер 4. Осуществляют синхронизацию времени T0 модуля управления и контроля 10 и контроллера 4.
Далее определяют режим управления мобильной платформой 2: автоматический или ручной. Автоматический режим управления предполагает построение маршрута движения мобильной платформы 2 вдоль или вокруг обследуемого объекта и запись географических координат точек маршрута ХBi, YBi, ZBi в контроллер 4 мобильной платформы 2 по которым упомянутая платформа 2 будет двигаться, при этом точки маршрута движения определяют с учетом поправки на скорость движения объекта в случае движущегося объекта и в зависимости от формы и размеров объекта. При круговом движении мобильной платформы 2 маршрут строят так, чтобы начальная и конечная точки маршрута движения мобильной платформы 2 совпадали или находились рядом.
Под ручным режимом управления предполагают управление мобильной платформой 2 с помощью модуля управления мобильной платформой 12 блока управления 1.
На следующем этапе запускают мобильную платформу 2, при этом при нахождении обследуемого объекта на суше, мобильную платформу 2 запускают в верхней полусфере объекта, а при нахождении обследуемого объекта на воде, запускают и в нижней или только нижней полусфере объекта, при этом порядок подготовки и запуска второй мобильной платформы 2 идентичен описанному выше.
При прохождении мобильной платформы 2 каждой из заданных в контроллере 4 точек маршрута ХBi, YBi, ZBi в момент времени Ti фиксируют в модуле управления и контроля 10 координаты положение объекта ХА0, YA0, ZA0, а с помощью датчиков 3 осуществляют непрерывное измерение градиента постоянного магнитного поля М, при этом измеряют три ортогональные проекции градиента постоянного магнитного поля на оси прямоугольной системы координат. Одновременно датчиками 3 производят непрерывное измерение градиента переменного магнитного поля Е, при этом измеряют три ортогональные проекции градиента переменного магнитного поля на оси прямоугольной системы координат. Источником градиента магнитной индукции является объект с наведенными на корпусе переменными токами.
В датчиках 3 зарегистрированную величину градиента магнитного поля преобразуют в электрический сигнал и передают в АЦП 5, где электрический сигнал преобразуют в цифровой.
Из АЦП 5 цифровой сигнал передают в контроллер 4. Из контроллера 4 значения градиентов магнитного поля в момент времени Ti в точке с координатами ХBi, YBi, ZBi через модули связи 9 передают и записывают в регистраторе 11 блока управления 1.
Из регистратора 11 информацию о значении градиентов магнитного поля, привязанные по времени и координатам передают в модуль управления и контроля 10 и модуль обработки данных 13.
Вычисляют в модуле обработки данных 13 среднеквадратическое значение градиента постоянного магнитного поля, которое для каждой из проекций определяют по формуле:
Мi=√(МxBi2+МyBi2+МzBi2),
где Мi - среднеквадратическое значение трёх ортогональных векторов проекций градиента магнитного поля на оси прямоугольной системы координат Mx, Му, Мz, соответствующее скаляру объёмного градиента магнитного поля для каждой из точек ХBi, YBi, ZBi маршрута. Вычисляют среднеквадратическое значение градиента переменного магнитного поля, которое для каждой из проекций определяют по формуле:
Ei=√(ЕxВi2+ЕyВi2+ЕzВi2),
где Ei – среднеквадратическое значение трёх ортогональных проекций градиента переменного магнитного поля на оси прямоугольной системы координат Еx, Еу, Еz, соответствующее скаляру объёмного градиента магнитной индукции переменного магнитного поля для каждой из точек ХBi, YBi, ZBi маршрута.
Полученные скалярные значения градиентов постоянного М и переменного Е магнитных полей являются некритичными к положению датчиков 3 в точке измерения и служат для независимого считывания и взаимной корреляции обнаруженных аномалий и по совокупности выявленных признаков детально классифицировать вид дефекта.
В модуле обработки данных 13 по имеющимся данным о местоположении мобильной платформы 2 и координатах объекта в момент времени Ti рассчитывают расстояния Li от объекта до датчиков 3 на мобильной платформе 2:

Рассчитанные значения наикратчайших расстояний Li для каждой из точек маршрута, а также рассчитанные скалярные значения градиентов постоянного М и переменного Е магнитного поля передают в модуль моделирования 16.
По рассчитанному расстоянию Li и имея рассчитанные значения градиентов магнитного поля Мi и Ei определяют скорость изменения градиентов. Для определения скорости изменения градиентов используются различия градиентов Мi и Ei, полученные в разных точках пространства. В модуле моделирования 16 строят магнитограммы объекта в пространстве, основой которых являются зависимости скорости изменения градиентов составляющих по вертикальной и перпендикулярной горизонтальным ортогональным осям от расстояния Li вдоль объекта. Построенные магнитограммы выводят через модуль управления и контроля 10 в модуль отображения видеоинформации 14.
Новым является то, что аномалии магнитного поля распознают по изменению скаляра постоянного магнитного поля М и скаляра переменного магнитного поля Е, являющихся источниками от разных физических факторов, а именно постоянного магнитного поля, включающего магнитное поле Земли, исходную начальную намагниченность объекта и влияние магнитного поля окружающих металлических коммуникаций. А переменное магнитное поле Е включает магнитные поля, вызванные протекающим переменным током, наведенным на корпусе объекта и аномалиями случайных блуждающих токов. Изменение скаляра М включает состояния обнаруженного аномального участка намагниченности объекта. Изменение скаляра Е включает признаки аномалий переменного магнитного поля током, наведенным на корпусе объекта и аномалиями случайных блуждающих токов.
Кроме того, аномалии магнитного поля распознают по изменению проекций векторов сигналов на оси ХА0, YA0, ZA0. Одна из ортогональных компонент проекций векторов всегда имеет форму диаграммы с переходом (точка перегиба) через 0, а другая в всегда в месте перегиба имеет характерный максимум (экстремум). Эти признаки являются значимыми для обнаружения аномалий индукции постоянного магнитного поля и напряженности переменного электрического поля и определения центра пространственного местоположения аномалии.
Наличие на обследуемом участке объекта аномалий определяют по изменениям амплитуды, скорости изменения сигнала и формы магнитограмм постоянного и переменного магнитных полей, полученных в векторном и скалярном виде.
Таким образом, предлагаемые способ и устройство позволяют получать информацию по двум каналам, использующим разные физические методы, что делает устройство инвариантным к пространственному положению, увеличивает точность, достоверность измерений и обеспечивает взаимную корреляцию полезных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2742631C2 |
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| МАНЕВРЕННЫЙ СТЕНД ДЛЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОГО ПОЛЯ ОБЪЕКТОВ МОРСКОЙ ТЕХНИКИ | 2022 |
|
RU2789914C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
Изобретение относится к области электротехники, в частности к способам и устройствам для измерения магнитных и электрических полей, создаваемых ферромагнитными объектами. Технический результат заключается в повышении точности, информативности и достоверности результатов измерений сигнатуры объекта. Достигается тем, что измерения магнитного поля контролируемого объекта осуществляют с подвижной платформы, движущейся по запланированным вдоль объекта точкам маршрута с учетом скорости движения объекта, в каждой из i точек маршрута движения платформы определяют ее положение и положение объекта и регистрируют с помощью магнитных датчиков градиенты постоянного и переменного магнитных полей объекта и их ортогональные проекции на оси прямоугольной системы координат в текущий момент времени Ti, измеренные величины в виде цифрового сигнала передают в блок управления, где вычисляют среднеквадратические значения градиентов магнитного поля и расстояния от объекта до платформы Li для каждой из i точек маршрута в момент времени Ti и определяют скорость изменения скалярных и векторных значений градиентов магнитного поля, по величине градиентов и скорости их изменения определяют аномальную намагниченность объекта. 2 н. и 14 з.п. ф-лы, 1 ил.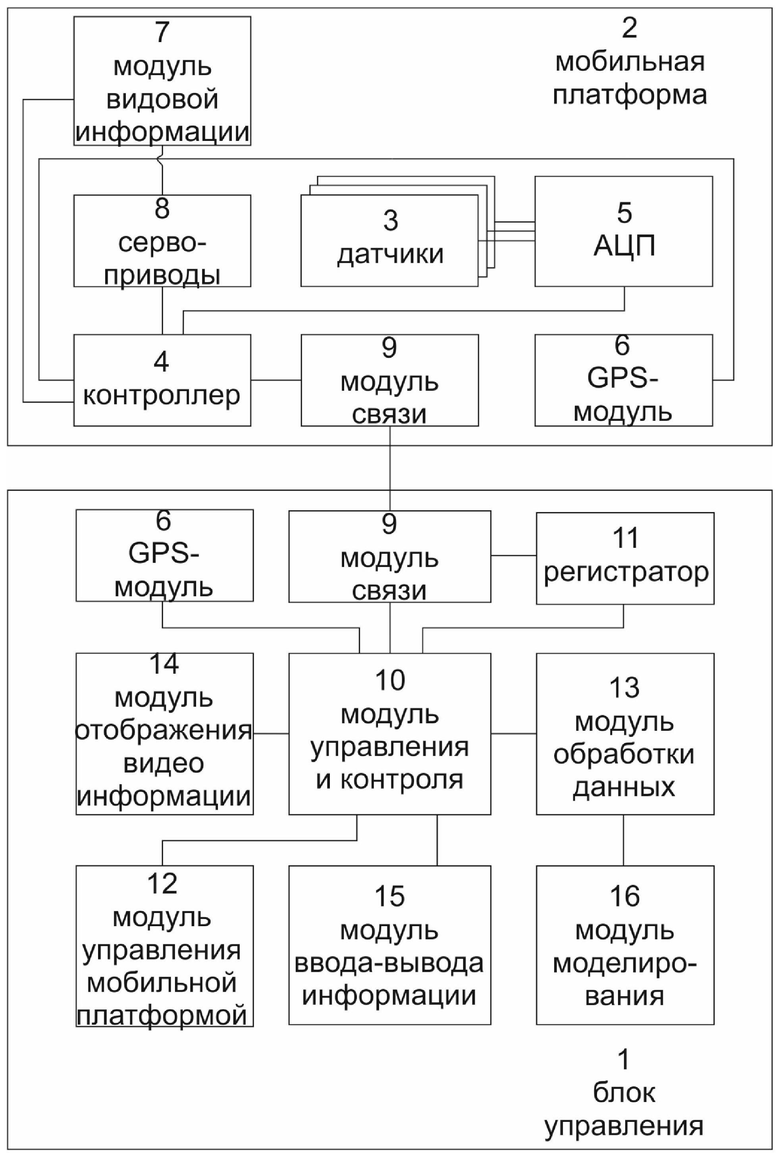
1. Способ контроля магнитного состояния объектов, характеризующийся измерением магнитного поля контролируемого объекта, отличающийся тем, что измерения магнитного поля контролируемого объекта осуществляют с подвижной платформы, движущейся по запланированным вдоль объекта точкам маршрута с учетом скорости движения объекта, в каждой из i точек маршрута движения платформы определяют ее положение и положение объекта и регистрируют с помощью магнитных датчиков градиенты постоянного и переменного магнитных полей объекта и их ортогональные проекции на оси прямоугольной системы координат в текущий момент времени Ti, измеренные величины в виде цифрового сигнала передают в блок управления, где вычисляют среднеквадратические значения градиентов магнитного поля и расстояния от объекта до платформы Li для каждой из i точек маршрута в момент времени Ti и определяют скорость изменения скалярных и векторных значений градиентов магнитного поля, по величине градиентов и скорости их изменения определяют аномальную намагниченность объекта.
2. Способ по п.1, отличающийся тем, что управление платформой осуществляют в автоматическом режиме.
3. Способ по п.1, отличающийся тем, что управление платформой осуществляют вручную.
4. Способ по п.1, отличающийся тем, что движение платформы осуществляют в верхней полусфере объекта.
5. Способ по п.1, отличающийся тем, что движение платформы осуществляют в нижней полусфере объекта.
6. Способ по п.1, отличающийся тем, что расстояние от объекта до платформы определяют решением обратной геодезической задачи.
7. Устройство контроля магнитного состояния объектов, содержащее платформу с размещенными на ней магнитными датчиками, отличающееся тем, что дополнительно содержит блок управления, включающий в себя модуль управления и контроля устройством с подключенными к нему модулями регистрации, обработки и отображения обработанной информации от магнитных датчиков, а также модуль удаленного управления платформой, платформа выполнена подвижной и содержит размещенные на ней магнитные датчики, подключенные к контроллеру, к контроллеру также подключены модуль видовой информации и приводы управления движением платформы, контроллер платформы соединен с модулем управления и контроля посредством модулей связи, к модулю управления и контроля и контроллеру платформы подключены модули привязки.
8. Устройство по п.7, отличающееся тем, что модуль управления и контроля выполнен в виде ПЭВМ.
9. Устройство по п.7, отличающееся тем, что модуль отображения видеоинформации выполнен в виде как минимум одного монитора (экрана).
10. Устройство по п.7, отличающееся тем, что модуль привязки выполнен в виде GNSS-приемника для определения текущих координат платформы и объекта и обеспечения позиционирования платформы при контроле магнитного состояния объекта.
11. Устройство по п.7, отличающееся тем, что платформа выполнена в виде беспилотного воздушного судна.
12. Устройство по п.7, отличающееся тем, что платформа выполнена в виде необитаемого подводного аппарата.
13. Устройство по п.7, отличающееся тем, что платформа выполнена в виде надводного автономного судна.
14. Устройство по п.7, отличающееся тем, что платформа выполнена в виде робомобиля.
15. Устройство по п.7, отличающееся тем, что магнитные датчики выполнены в виде трехкомпонентного феррозондового градиентометра.
16. Устройство по п.7, отличающееся тем, что модуль видовой информации выполнен в виде фото-, видеокамер для получения окружающей платформу обстановки.
| Система крепления керамогранита, плит из искусственного и натурального камня в конструкциях навесных фасадных систем с применением видимых планок-держателей | 2019 |
|
RU2704065C2 |
| US 4611171 A, 09.09.1986 | |||
| СПОСОБ ПРИВЕДЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ МАГНИТНОГО ПОЛЯ ЛИНЕЙНЫМ СТЕНДОМ К СИСТЕМЕ КООРДИНАТ ОБЪЕКТА | 1996 |
|
RU2142143C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ СВОЙСТВ И СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ СВОЙСТВ | 2014 |
|
RU2623813C2 |

