Изобретение относится к области электроизмерительной техники и предназначено для измерений магнитных полей кораблей.
В настоящее время основными способами измерений магнитных полей кораблей являются способы, основанные на использовании стационарных и переносных стендов с измерительными датчиками.
Способы с использованием стационарных стендов с измерительными датчиками являются более чувствительными и точными, чем способы с использованием корабельных измерительных датчиков, и используются при регулировке размагничивающих устройств и контроле (измерении) остаточного поля, в том числе маломагнитных кораблей.
Известен способ, при котором стенд с первичными измерительными преобразователями (датчиками) располагают на дне акватории, а корабль, поле которого измеряется, либо проходит над стендом, либо ориентированный определенным образом устанавливается над ним неподвижно. Второй вариант используется, как правило, для регулировки устройств размагничивания корабля с целью уменьшения его магнитного поля. Контроль же и окончательная проверка поля корабля, в том числе и остаточного (после регулировки устройств размагничивания), осуществляется "на ходу" при проходе корабля над стендом с расположенными в линию датчиками. Полученные результаты измерений при необходимости используются также при расчете дипольного момента и для пересчета поля корабля на другие глубины. В любом случае полученные при измерениях результаты должны быть пересчитаны в систему координат исследуемого корабля, что предусматривает необходимость определения его положения (в том числе курса) относительно линии размещения датчиков.
Существующий способ определения положения исследуемого корабля оптическим дальномером непосредственно или с помощью телекамеры обеспечивает выполнение требований при неподвижном относительно стенда с измерительными датчиками размещении дальномера, например, на берегу или на ПАЛе. Однако в случае размещения дальномера и при этом, как правило, и вторичных преобразователей, средств обработки и представления информации на вспомогательном судне (корабле-носителе), смещение последнего приводит к погрешности определения курса и координат исследуемого корабля относительно неподвижно расположенных измерительных датчиков и, как следствие, к погрешности определения поля в системе координат корабля.
Ситуация с размещением дальномера на корабле-носителе возникает для так называемых маневренных стендов с измерительными датчиками и для стендов без магистрального кабеля, когда корабль-носитель с необходимыми навигационными устройствами, в том числе дальномером, вторичными преобразователями, устройствами обработки и представления информации, швартуется к бочке (а не к неподвижному ПАЛу) и в процессе проведения измерений возможно его смещение.
Маневренные стенды с измерительными датчиками используются, как правило, для контроля полей кораблей в необорудованных районах. Датчики таких стендов устанавливаются на дно временно с борта корабля-носителя; после установки датчиков этот корабль-носитель располагается от них на таком расстоянии, чтобы его магнитное поле не оказывало влияния на результаты измерений поля исследуемого корабля.
Способ, основанный на применении акустических дальномеров, размещенных непосредственно на линии измерительных датчиков, принципиально позволяет определить положение исследуемого корабля относительно линии датчиков. Однако издаваемые кораблем при его движении акустические помехи приводят к погрешности определения положения характерных частей его корпуса, что в результате приводит к снижению точности определения поля в системе координат исследуемого корабля.
Ближайшим аналогом к предлагаемому способу является способ (патент США N 5570023, кл. G 9/06 от 29.10.96), содержащий следующие общие с предлагаемым способом признаки: способ приведения результатов измерений магнитного поля линейным стендом с измерительными датчиками к системе координат корабля, состоящий в том, что определяют расстояние до крайних измерительных датчиков для движущегося исследуемого корабля, с помощью измерительных датчиков регистрируют (результаты) измерения его магнитного поля, с помощью оптического дальномера определяют положение исследуемого корабля и производят пересчет результатов измерений магнитного поля измерительными датчиками в систему координат исследуемого корабля.
Способ может быть результативно применен только для стационарного стенда, когда известны его координаты (известно положение линии расположения датчиков в неподвижной системе координат). Для маневренных стендов способ не позволяет определить истинное положение исследуемого корабля относительно линии стенда (необходимо знать положение линии датчиков маневренного стенда). Определить положение линии датчиков маневренного стенда при указанном способе можно только очень приближенно путем счисления места положения корабля-носителя в момент постановки датчиков и фиксирования этого места. При оттягивании корабля-носителя от поставленных датчиков возникает погрешность определения координат линии стенда относительно корабля-носителя и, как следствие, точность определения поля корабля в его координатах невысока.
Целью предлагаемого способа является повышение точности определения поля корабля в его системе координат.
Сущность предлагаемого способа заключается в том, что определяют расстояние до крайних измерительных датчиков, для движущегося исследуемого корабля с помощью измерительных датчиков регистрируют измерения его магнитного поля, оптическим дальномером определяют положение исследуемого корабля, вычисляют длину пути исследуемого корабля и производят пересчет результатов измерений магнитного поля измерительными датчиками в систему координат исследуемого корабля, до начала равномерного движения исследуемого корабля гиротеодолитом устанавливают систему координат входящего в состав линейного стенда корабля-носителя S-N и O-W, расстояния до крайних измерительных датчиков определяют акустическими дальномерами относительно двух размещенных на оси O-W точек корабля-носителя, гиротеодолитом определяют угол между направлением на дальнюю от корабля-носителя веху стенда и осью O-W, оптическим дальномером, направленным на отражатель и установленным в носовой части корабля-носителя, устанавливают момент пересечения исследуемым кораблем оси O-W в первой точке и определяют координату этой точки на оси O-W, затем определяют момент пересечения исследуемым кораблем направления на дальнюю веху во второй точке и расстояние этой точки от начала координат корабля-носителя, по полученным данным определяют длину линейного стенда путем вычисления расстояния между крайними измерительными датчиками, вычисляют координат центра линии стенда - третьей точки, координаты второй точки, длину пути исследуемого корабля между первой и второй точками, скорость и угол курса исследуемого корабля, координаты точки пересечения исследуемым кораблем линии стенда - четвертой точки, расстояние между третьей и четвертой точками, отклонение линии стенда от направления O-W, длину исследуемого корабля, при этом результаты измерений магнитного поля исследуемого корабля регистрируются начиная с момента прихода корабля во вторую точку до момента прохождения кораблем удвоенного расстояния между второй и четвертой точками, а пересчет результатов измерений производят, используя полученные массивы данных, с помощью интерполяционных полиномов.
Существо способа состоит в следующем (см. фиг. 1). До начала движения исследуемого корабля направление на географический полюс фиксируется гиротеодолитом, размещенным в точке Ок на корабле-носителе. Из зафиксированных двух точек И1 и И2, расположенных на корабле-носителе на оси Ок-W, акустическим дальномером определяется расстояние до крайних измерительных датчиков (до дальнего Гд и ближнего Гб гидрофонов) R1д, R2д, R1Б, R2Б, и вычисляются координаты X и Y этих датчиков (гидрофонов) на основании нижеследующих выражений.
Для ближнего гидрофона

Здесь и далее X и Y координаты соответственно по осям S-N и O-W. Аналогично определяются координаты дальнего гидрофона.
Гиротеодолитом определяется направление на дальнюю веху Bд-αвд, и оптическим дальномером расстояние до нее Rвд.
Координаты дальней вехи
Xвд= Rвд•sinαвд, Yвд= Rвд•cosαвд.
Далее вычисляется длина стенда L с (расстояние между крайними измерительными датчиками) и координаты Хoc, Yoc точки 3 (начала координат стенда)
Xос = Xгб + 0,5 (Xгд - Xгб; Yос = Yгб + 0,5 (Yгд - Yгб);
α1= π/2-α; α = arcsin [(Xгд - Xгб)/L с]
Все вышеуказанное выполняется до подхода исследуемого корабля к линии Ок-W (с центром координат в точке Ок).
Визир гиротеодолита устанавливается вдоль линии Ок-W и оптическим дальномером из точки Ок фиксируется момент пересечения носовой оконечности исследуемого корабля линии Ок-W (время t1) и определяется расстояние от точки 1 до точки Ок, т.е. длина  . Визир гиротеодолита устанавливается в направлении на Вд и в момент пересечения носовой оконечностью корабля линии ВдОк (время t2) дальномером определяется расстояние между точками 2 и Ок, т.е. определяется L2. На основании полученных данных определяются:
. Визир гиротеодолита устанавливается в направлении на Вд и в момент пересечения носовой оконечностью корабля линии ВдОк (время t2) дальномером определяется расстояние между точками 2 и Ок, т.е. определяется L2. На основании полученных данных определяются:
координаты точки 2
X2= L2•sinαвд, Y2= L2•cosαвд,
расстояние от точки 1 до точки 2
Скорость движения исследуемого корабля (движение исследуемого корабля предполагается прямолинейным и равномерным)
V = L1-2/(t2 - t1);
угол курса исследуемого корабля
αк= arctg[(Y1-Y2)/X2];
координаты точки 4 (Х4 и Y4) из решения уравнений
предполагаемое расстояние между точками 5 и 4 (предполагаемое смещение L3-4 прохода корабля относительно начала координат стенда-точки 3)
расстояние между точками 2 и 4
Предполагаемое время пересечения носа корабля оси стенда
t4 = t2 + L2-4/V.
С момента времени t2 средством измерения осуществляется регистрация результатов измерений магнитного поля исследуемого корабля в реальном масштабе времени и таким образом, кроме приведенных выше величин, должен быть известен: массив времени измерений и результатов измерений в каждый момент времени и массив координат измерительных датчиков в системе координат исследуемого корабля.
Этот массив вычисляется известным образом из массива координат измерительных датчиков в системе координат стенда.
Для решения задачи приведения результатов измерений магнитного поля линейным стендом к системе координат корабля необходимы следующие исходные данные:
массив результатов измерений в системе координат стенда;
массив времени измерений;
массив координат датчиков (Х и Y компонент) в системе координат корабля (рассчитывается в соответствии с вышеизложенным);
массивы координат (X и Y) в системе координат корабля, в которых вычисляются результаты измерений (к которым приводятся результаты измерений, произведенным в системе координат стенда).
Для решения задачи используется один из интерполяционных полиномов, например, интерполяционная формула Ньютона [Г.Корн, Т.Корн. Справочник по математике. - М.: 1973, с. 676].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2001 |
|
RU2204821C1 |
| СПОСОБ И УСТРОЙСТВО СОХРАНЕНИЯ ГЕОДЕЗИЧЕСКОГО НАПРАВЛЕНИЯ | 2013 |
|
RU2555511C2 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК | 1997 |
|
RU2125276C1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО И ИЗМЕРИТЕЛЬНОГО КОНТРОЛЯ ВНУТРЕННИХ ПОЛОСТЕЙ | 2004 |
|
RU2285235C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 1996 |
|
RU2136124C1 |
| СРЕДСТВО ИЗМЕРЕНИЙ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ ПЛАВСРЕДСТВ | 1996 |
|
RU2136015C1 |
Способ используется для измерений магнитных полей корабля. До начала равномерного движения исследуемого корабля гиротеодолитом устанавливают систему координат входящего в состав линейного стенда корабля-носителя S-N и O-W, расстояния до крайних измерительных датчиков определяют акустическими дальномерами относительно двух размещенных на оси O-W точек корабля-носителя. Гиротеодолитом определяют угол между направлением на дальнюю от корабля-носителя веху стенда и осью O-W. Оптическим дальномером, направленным на отражатель и установленным в носовой части корабля-носителя, устанавливают момент пересечения исследуемым кораблем оси O-W в первой точке и определяют координту этой точки на оси O-W. Определяют момент пересечения исследуемым кораблем направления на дальнюю веху во второй точке и расстояние этой точки от начала координат корабля-носителя. По полученным данным определяют длину стенда путем вычисления расстояния между крайними датчиками. Вычисляют координаты центра линии стенда - третьей точки, координаты второй точки, длину пути исследуемого корабля, скорость и угол курса корабля, координаты точки пересечения исследуемым кораблем линии стенда - четвертой точки, расстояние между третьей и четвертой точками, длину исследуемого корабля. Результаты измерений магнитного поля корабля регистрируют, начиная с момента прихода корабля во вторую точку до момента прохождения кораблем удвоенного расстояния между второй и четвертой точками. Обеспечено повышение точности определения поля корабля в его системе координат. 1 ил.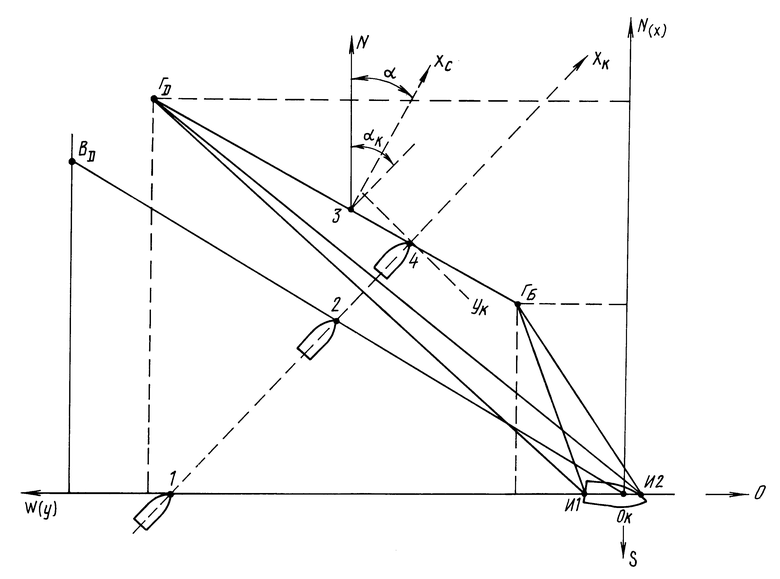
Способ приведения результатов измерений магнитного поля линейным стендом с измерительными датчиками к системе координат корабля, состоящий в том, что определяют расстояния до крайних измерительных датчиков, для движущегося исследуемого корабля с помощью измерительных датчиков регистрируют измерения его магнитного поля, оптическим дальномером определяют положение исследуемого корабля, вычисляют длину пути исследуемого корабля и производят пересчет результатов измерений магнитного поля измерительными датчиками в систему координат исследуемого корабля, отличающийся тем, что до начала равномерного движения исследуемого корабля гиротеодолитом устанавливают систему координат входящего в состав линейного стенда корабля-носителя S-N и O-W, расстояния до крайних измерительных датчиков определяют акустическими дальномерами относительно двух размещенных на оси O-W точек корабля-носителя, гиротеодолитом определяют угол между направлением на дальнюю от корабля-носителя веху стенда и осью O-W, оптическим дальномером, направленным на отражатель и установленным в носовой части корабля-носителя, устанавливают момент пересечения исследуемым кораблем оси O-W в первой точке и определяют координату этой точки на оси O-W, затем определяют момент пересечения исследуемым кораблем направления на дальнюю веху во второй точке и расстояние этой точки от начала координат корабля-носителя, по полученным данным определяют длину линейного стенда путем вычисления расстояния между крайними измерительными датчиками, вычисляют координаты центра линии стенда - третьей точки, координаты второй точки, длину пути исследуемого корабля между первой и второй точками, скорость и угол курса исследуемого корабля, координаты точки пересечения исследуемым кораблем линии стенда - четвертой точки, расстояние между третьей и четвертой точками, отклонение линии стенда от направления O-W, длину исследуемого корабля, при этом результаты измерений магнитного поля исследуемого корабля регистрируют, начиная с момента прихода корабля во вторую точку до момента прохождения кораблем удвоенного расстояния между второй и четвертой точками, а пересчет результатов измерений производят, используя полученные массивы данных, с помощью интерполяционных полиномов.
| US 5570023 А, 29.10.96 | |||
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| EP 0321123 А1, 21.06.89. | |||
