Изобретение относится к области космической техники и может быть использовано для восстановления ориентации (ВО) космического аппарата (КА) относительно орбитальной системы координат (ОСК) из произвольного неориентированного положения с использованием датчика звезд (ДЗ).
Известны способы орбитальной ориентации КА, приведенные в книге авторов В.Н. Бранец, И.П. Шмыглевский «Применение кватернионов в задачах ориентации твердого тела». Москва, Наука 1973 г., 320 с. (см. стр. 205-226), где рассматриваются только общетеоретические аспекты приведения КА в ОСК, без учета работоспособности ДЗ в процессе ВО.
Известен способ, изложенный в статье «Система ориентации и стабилизации космического аппарата по информации с астродатчиков», Электронный журнал «Труды МАИ». Выпуск №38, в котором изложены результаты летных испытаний, но не недостаточно раскрыты существенные признаки способа.
В книге авторов О.Н. Анучин, И.Э. Комарова, Л.Ф. Перфильев «Бортовые системы навигации и ориентации искусственных спутников Земли» - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004 г. приводится большое количество методов ориентации твердого тела без конкретизации рабочего алгоритма астроориентации.
В книге И.Ф. Кавинов «Инерциальная навигация в околоземном пространстве», Москва: Машиностроение, 1988, с. 66-69 рассматривается ВО КА при визировании Солнца и Звезды. Способ осложнен угловыми параметрами Эйлера и обязательным наличием датчика Солнца.
В книге Системы астрономической ориентации космических аппаратов/ В.И. Кочетков - Москва.: Машиностроение, 1980 рассматриваются способы астрокоррекции для систем с гиростабилизированными платформами, что малопригодно для систем ориентации современных КА.
Наиболее близким способом, который может быть принять за прототип, является способ, изложенный в патенте RU 2610766.
Способ содержит:
- начальное демпфирование угловых скоростей КА относительно инерциальной геоцентрической абсолютной системы координат (ИСК);
- расчет по данным аппаратуры спутниковой навигации матрицы А положения орбитальной системы координат (ОСК) относительно ИСК;
- на момент времени t0 начала ВО определение датчиком звезд (ДЗ) матрицы ориентации Mro(t0) связанной системы координат (ССК) относительно ИСК;
- измерение блоком гироскопических измерителей угловых скоростей (БИУС) текущей абсолютной угловой скорости КА в проекциях на оси ССК - ωg(p,q,r);
- получение данных баллистического расчета о скорости вращения ОСК относительно ИСК ωo(ωxo,ωyo,ωzo) и расчет начальной матрицы ориентации КА относительно ОСК S(t0)=Mro(t0)AT(t0), где Т - знак транспонирования.
Способ имеет два существенных недостатка. Первый заключается в том, что восстановление ориентации происходит относительно замороженной ОСК на момент определения матрицы ориентации КА относительно ОСК -Mro(t0) в следствие ее «убегания», что приводит к большим ошибкам в конце восстановления ориентации. Второй недостаток более существенный -возможность нарушения работы ДЗ при попадании Земли или Солнца в поле зрения ДЗ. Это связано с тем, что в процессе ВО движение КА зачастую происходит «через голову» - спутник может повернуться на 180° или даже на 360°. При этом в поле зрения ДЗ обязательно попадет либо Земля, либо Солнце. В этом случае нарушается работа ДЗ и вследствие этого нарушается процесс ВО, которое становится невозможным принципиально.
Техническим результатом является существенное повышение точности и исключение сбоя в работе ДЗ в процессе ВО.
Для достижения цели в отличие от способа, который включает начальное демпфирование угловых скоростей КА относительно инерциальной - геоцентрической абсолютной системы координат (ИСК), расчет по данным аппаратуры спутниковой навигации матрицы А положения орбитальной системы координат (ОСК) относительно ИСК, на момент времени t0 определение датчиком звезд (ДЗ) матрицы ориентации Mro(t0) связанной системы координат (ССК) относительно ИСК, измерение блоком гироскопических измерителей угловых скоростей (БИУС) текущей абсолютной угловой скорости КА в проекциях на оси связанной системы координат (ССК) - ωg(p,q,r), получение данных баллистического расчета о скорости вращения ОСК относительно ИСК ωo(ωxo,ωуо,ωzo) и расчет начальной матрицы ориентации КА относительно ОСК S(t0)=Mro(t0)AT(t0), где т - знак транспонирования, введены новые операции.
На момент времени t0 запоминают значения матриц S(t0), Mr0(t0) и отключают ДЗ из контура ориентации, в течение всего времени восстановления ориентации t,t0 прогнозируют показания ДЗ с использованием данных от БИУС путем интегрирования уравнения Пуассона  с запомненным начальным положением
с запомненным начальным положением  и рассчитывают прогнозируемое значение матрицы
и рассчитывают прогнозируемое значение матрицы  ориентации ССК относительно ОСК путем интегрирования уравнения
ориентации ССК относительно ОСК путем интегрирования уравнения  с запомненным начальным положением
с запомненным начальным положением  из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями
из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями 
 где
где  - элементы матриц
- элементы матриц  создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота
создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота  и поворачивают КА до совмещения ССК и ОСК, по окончании восстановления ориентации подключают ДЗ в контур управления и продолжают полет по его показаниям.
и поворачивают КА до совмещения ССК и ОСК, по окончании восстановления ориентации подключают ДЗ в контур управления и продолжают полет по его показаниям.
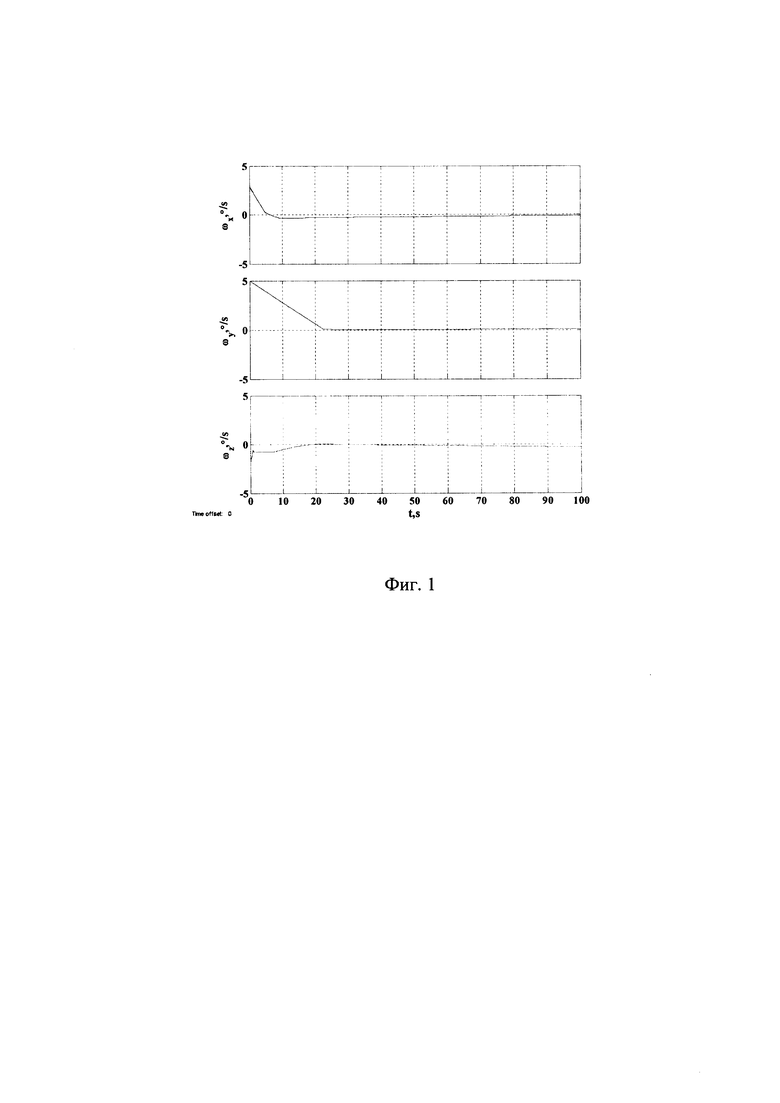
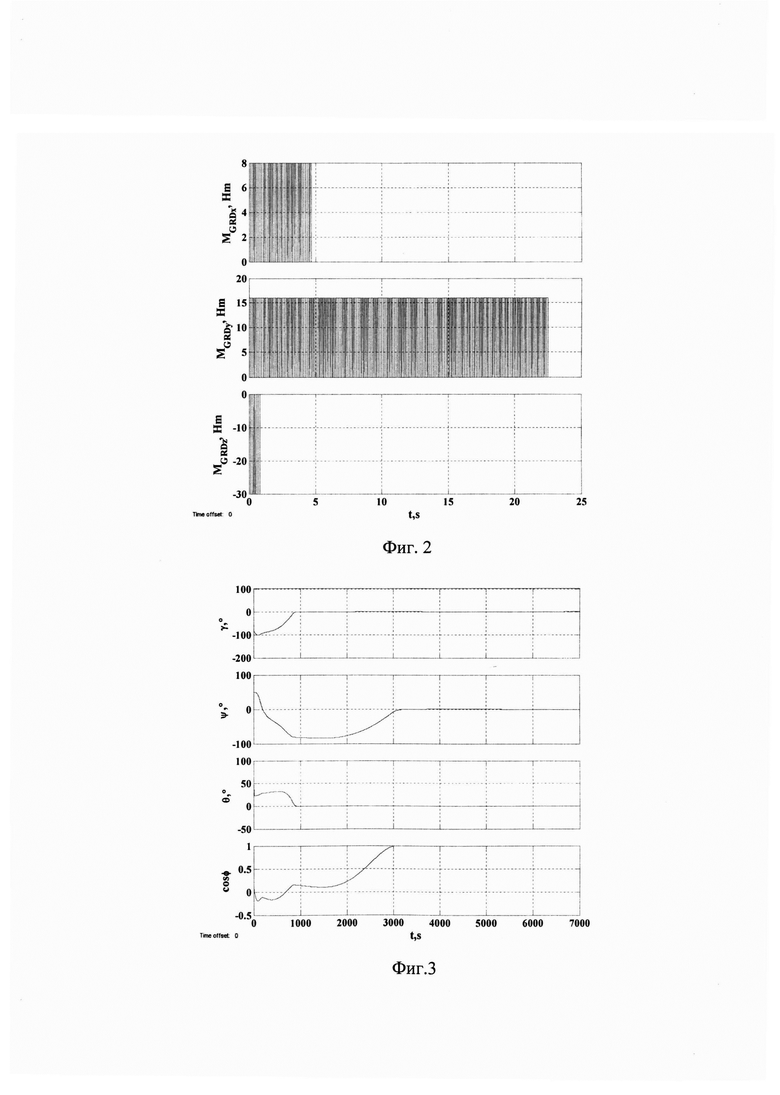
На фигурах 1 - 3 показана иллюстрация ВО КА из положения ϑ=80°, ψ=70°, γ=-110°.
Моделирование проводилось для КА массой 1000 кг с моментами инерции Jψ - Jϑ=3500 кгм2, Jγ=1000 кгм2.
На участке демпфирования с остаточными начальными угловыми скоростями КА - 
 были включены ЖРД.
были включены ЖРД.
Демпфирование завершилось за время t=25 с с условиями окончания демпфирования 
По окончании демпфирования отключены ЖРД и подключены управляющие двигатели маховики (УДМ) с максимальным кинетическим моментом 5 нмс и максимальным управляющим моментом 0,05 нм.
В этот же момент времени были приняты баллистические данные и сняты показания ДЗ-Mro(t0). В соответствии с формулой была рассчитана начальная матрица ориентации КА относительно ОСК:
S(t0)=Mro(t0)AT(t0)
И сразу после этого был отключен ДЗ из контура ориентации. На участке между 25 с и 3000 с (фиг. 3) выполняется восстановления ориентации только по показаниям БИУС. Для этого интегрируется в бортовом вычислителе уравнение Пуассона

с запомненным начальным положением  из полученных решений были найдены компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями
из полученных решений были найдены компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями 
 где
где  - элементы матриц
- элементы матриц  моменты управления на корпус КА по соответствующим осям ССК были заданы как функции от компонент векторов конечного поворота
моменты управления на корпус КА по соответствующим осям ССК были заданы как функции от компонент векторов конечного поворота  в дальнейшем поворачивают КА до совмещения ССК и ОСК.
в дальнейшем поворачивают КА до совмещения ССК и ОСК.
По окончании восстановления ориентации на 3000 с подключают ДЗ в контур управления и продолжают полет по его показаниям, т.е. в устойчивом режиме астроориентации.
В случае не определения ориентации КА датчиком звезд по окончании начального демпфирования, вследствие попадания в его поле зрения Земли или Солнца, принудительно вращают КА до попадания звездного поля в его поле зрения и устойчивого определения им ориентации КА относительно ИСК, после чего вновь выполняют демпфирование угловых скоростей КА.
Таким образом, процесс восстановления ориентации КА из произвольного неориентированного положения выполняется быстро и качественно и полностью защищен от нарушений в работе ДЗ в процессе вращения спутника из-за возможных попаданий в его поле зрения Земли или Солнца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ астроориентации орбитального космического аппарата (варианты) | 2022 |
|
RU2793977C1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |
| Способ восстановления ориентации орбитального космического аппарата | 2015 |
|
RU2610766C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597015C1 |
| Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными | 2015 |
|
RU2613097C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2597018C2 |
Изобретение относится к области космической техники и может быть использовано при разработке режима восстановления орбитальной ориентации космического аппарата (КА) из произвольного неориентированного положения с использованием датчика звезд (ДЗ). Для восстановления ориентации КА отключают ДЗ на весь период времени восстановления ориентации, заменяют его показания прогнозными значениями, которые получают путем интегрирования соответствующего уравнения Пуассона. Достигается повышение точности в процессе восстановления ориентации КА и исключение сбоя в работе ДЗ. 1 з.п. ф-лы, 3 ил.
1. Способ восстановления орбитальной ориентации космического аппарата (КА) по показаниям датчика звезд (ДЗ), включающий начальное демпфирование угловых скоростей КА относительно инерциальной - геоцентрической абсолютной системы координат (ИСК), расчет по данным аппаратуры спутниковой навигации матрицы А положения орбитальной системы координат (ОСК) относительно ИСК, на момент времени t0 определение датчиком звезд (ДЗ) матрицы ориентации Mro(t0) связанной системы координат (ССК) относительно ИСК, измерение блоком гироскопических измерителей угловых скоростей (БИУС) текущей абсолютной угловой скорости КА в проекциях на оси связанной системы координат (ССК) - ωg(p, q, r), получение данных баллистического расчета о скорости вращения ОСК относительно ИСК ωo(ωхо, ωуо, ωzo) и расчет начальной матрицы ориентации КА (ССК) относительно ОСК S(t0)=Mro(t0)AT(t0), где т - знак транспонирования, отличающийся тем, что на момент времени t0 запоминают значения матриц S(t0), Mro(t0) и отключают ДЗ из контура ориентации, в течение всего времени восстановления ориентации t, t0 прогнозируют показания ДЗ с использованием данных от БИУС путем интегрирования уравнения Пуассона  с запомненным начальным положением
с запомненным начальным положением 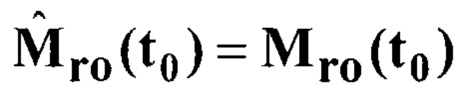 и рассчитывают прогнозируемое значение матрицы
и рассчитывают прогнозируемое значение матрицы  ориентации ССК относительно ОСК путем интегрирования уравнения
ориентации ССК относительно ОСК путем интегрирования уравнения  с запомненным начальным положением
с запомненным начальным положением  из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями
из полученных решений находят компоненты вектора конечного поворота Эйлера и его производные в соответствии с выражениями 
 где
где  - элементы матриц
- элементы матриц  создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота
создают моменты управления на корпус КА по соответствующим осям ССК как функции от компонент векторов конечного поворота  и поворачивают КА до совмещения ССК и ОСК, по окончании восстановления ориентации подключают ДЗ в контур управления и продолжают полет по его показаниям.
и поворачивают КА до совмещения ССК и ОСК, по окончании восстановления ориентации подключают ДЗ в контур управления и продолжают полет по его показаниям.
2. Способ по п. 1, отличающийся тем, что по окончании демпфирования и при условии не определения ориентации КА датчиком звезд, вследствие попадания в его поле зрения Земли или Солнца, принудительно вращают КА до попадания звездного поля в его поле зрения и устойчивого определения им ориентации КА относительно ИСК, после чего вновь выполняют демпфирование угловых скоростей КА.
| Способ восстановления ориентации орбитального космического аппарата | 2015 |
|
RU2610766C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2620284C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСЕЙ КООРДИНАТ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2160216C1 |
| CN 111688952 A, 22.09.2020. | |||

