Изобретение относится к области исследования технического состояния длинномерных труб, в том числе гибких насосно-компрессорных труб (ГНКТ) колтюбинговых установок.
Известен внутритрубный многоканальный профилемер (Патент РФ №2529820, МПК G01B 7/28), при помощи которого обследование трубопровода осуществляется путем регистрации угловых отклонений измерительных рычагов, равномерно расположенных вокруг оси исследуемого трубопровода. Один конец каждого из измерительных рычагов непосредственно соединен с соответствующим датчиком углового положения, а другой, имеющий полиуретановую накладку, находится во время сканирования в контакте с внутренней поверхностью трубы и прижимается к ней при помощи возвратной пружины кручения. Профилемер вдоль оси обследуемого трубопровода перемещается за счет потока перекачиваемого продукта. Датчиками углового положения регистрируются отклонения измерительных рычагов на неровностях профиля трубопровода. Благодаря полиуретановому покрытию и проведению измерений в жидкой среде, которая может служить также в качестве смазки трущихся поверхностей, низок интенсивной износ конца рычага, имеющего постоянный контакт со внутренней поверхностью исследуемой трубы во время сканирования.
Известно устройство для измерения внутреннего профиля трубопровода (Патент РФ №2690973, МПК G01B 5/20, F16L 101/30), состоящее из цилиндрического корпуса, по окружности которого независимо друг от друга равномерно установлены рычажные системы. При этом рычаг каждой из этих систем расположен на горизонтальной оси, установленной на соответствующем поворотном кронштейне, и в процессе измерения одним своим концом, где установлена накладка, контактирует с внутренней поверхностью диагностируемого трубопровода, а другим своим концом соединена с пружиной растяжения, обеспечивающей этот контакт. Во время перемещения устройства с перекачиваемым продуктом внутри трубопровода рычаги независимо друг от друга отклоняются вокруг горизонтальной оси на поворотном кронштейне при наезде на геометрическую особенность обследуемого объекта, что регистрируется датчиками углового положения, имеющихся на каждой рычажной системе. При наезде рычага на геометрическую особенность трубы, способную вызвать поперечную нагрузку, приводящую к его деформации, поворотный кронштейн отклоняется вокруг вертикальной оси, установленной на соответствующем неподвижном кронштейне рычажной системы, а после прекращения воздействия поперечной нагрузки возвращается в исходное положение. Это повышает точность диагностических данных и срок службы рычагов устройства.
Известно калибровочное устройство (Патент РФ №2693039, МПК F16L 55/28, F16L 101/30, G01B 7/34, G01B 7/13), измерительная система которого представляет собой систему независимых измерительных рычагов, каждый из которых состоит из рычага с накладкой, подвижно установленного на оси, содержащейся в кронштейне, и датчика угловых перемещений, который осью через поводок пружиной соединен с рычагом и закреплен на том же кронштейне. При этом контактная часть измерительной системы - накладки рычагов, расположена на диаметре, который составляет 85% от диаметра центрирующих манжет калибровочного устройства. Таким образом, накладки рычагов измерительной системы вступают в контакт с внутренней поверхностью трубопровода только при наезде калибровочного устройства, перемещаемого вместе с перекачивающимся продуктом, на геометрическую особенность трубопровода, превышающую 15% его номинального внутреннего диаметра и фиксируемую датчиками углового положения. Это обеспечивает увеличение срока эксплуатации комплектующих данного прибора.
Общим недостатком рассмотренных внутритрубных устройств является сложность диагностирования труб, имеющих малый диаметр, так как для этого необходимы малогабаритные измерительные устройства, изготовление которых является достаточно сложным ввиду значительно больших размеров самих датчиков углового положения.
Известно устройство контроля овальности трубных изделий (Патент США №6862099B2, МПК G01B 11/08), осуществляющее измерение диаметра и овальности исследуемого трубного изделия при помощи лазерного луча, испускаемого неподвижным относительно корпуса устройства источником и отражаемого на сенсор, формирующий сигнал, от отражающей поверхности, имеющейся на детекторе, который находится в постоянном контакте с наружной поверхностью контролируемого трубного изделия во время сканирования. Диаметр изделия определяется при помощи двух вышеописанных лазерных приборов, установленных в корпусе устройства и осуществляющих измерение в одной плоскости. При этом корпус устройства выполнен в виде поворотной головки, имеющей возможность вращаться вокруг исследуемого изделия. Следовательно, во время сканирования при относительном перемещении устройства и контролируемого трубного изделия вдоль оси последнего и при одновременном вращательном движении поворотной головки устройства детекторы, находящиеся в контакте с поверхностью исследуемого изделия, движутся по спиральной траектории, что делает достаточным применение двух лазерных приборов для определения овальности.
Данное устройство имеет несложную конструкцию, однако для постоянного вращения поворотной головки вокруг исследуемой трубы необходимо использовать дополнительные устройства (электродвигатель, сервопривод и т.п.), что повышает затраты энергии на его функционирование. Недостатком устройства также является интенсивное изнашивание наконечников детекторов, находящихся в постоянном контакте с наружной поверхностью трубного изделия во время измерения, из-за трения скольжения, что может потребовать частой замены наконечников при сканировании непрерывных ГНКТ, а следовательно, к усложнению неразрушающего контроля их технического состояния в режиме реального времени и увеличению времени на его проведение.
В качестве наиболее близкого аналога взято устройство системы контроля гибкой насосно-компрессорной трубы (Патент США №5914596, МПК G01R 33/12), осуществляющей сканирование диаметра и овальности ГНКТ на основе вихретокового метода измерения. Данное устройство состоит из корпуса, в котором равномерно вокруг исследуемой трубы, перемещающейся продольно в процессе сканирования через это устройство, размещены по меньшей мере четыре датчика, в качестве которых используются вихретоковые преобразователи. Одна пара противоположно установленных датчиков определяет диаметр трубы в одной плоскости, другая пара - в плоскости, перпендикулярной плоскости измерения первой пары. Таким образом, путем сканирования диаметров исследуемой трубы в двух перпендикулярных друг другу плоскостях определяется ее овальность. На входе и выходе корпуса устройства размещены центраторы, центрирующий ролик одного из которых связан с датчиком измерения длины трубы, предназначенным для определения вдоль исследуемой трубы положений измеренных значений ее обследуемых параметров.
Достоинством вихретокового метода контроля является бесконтактное измерение, при этом на точность измерения не влияют влажность и загрязненность поверхности объекта контроля. Однако вихретоковые преобразователи, несмотря на простоту их конструкции, имеют высокую стоимость, что может существенно повысить стоимость самого устройства при использовании в нем нескольких преобразователей. При этом конструкция данного изобретения позволяет сканировать трубу только одного диаметра, что требует использования картриджей с преобразователями под каждый номинальный диаметр трубы. Последнее, в свою очередь, существенно увеличивает стоимость устройства и количество имеющихся в нем деталей, а следовательно, его массу. Кроме того, конструкция корпуса прибора не имеет разъема в плоскости, проходящей через его ось, что усложняет его монтаж перед использованием.
Общим и главным недостатком всех рассмотренных изобретений является отсутствие среди отслеживаемых ими параметров информации о кривизне трубы, по которой в режиме реального времени может быть проведена оценка изгибных напряжениях в ее материале.
В основу изобретения положена задача разработать устройство для сканирования геометрии трубы, обеспечивающее получение результатов измерения при помощи более простых и доступных датчиков, обеспечивающее возможность измерения широкого диапазона типоразмеров труб без использования картриджей под каждый типоразмер и способное в реальном времени определять радиус кривизны сканируемой трубы.
Для решения поставленной задачи в заявлено устройство, содержащее корпус, в котором равномерно вокруг исследуемой трубы размещены по меньшей мере четыре датчика для контроля диаметра и овальности, и центраторы, установленные на входе и выходе корпуса и включающие центрирующие ролики, с одним из которых связан датчик измерения длины трубы, при этом устройство дополнительно содержит расположенные по меньшей мере в одной плоскости измерения диаметра два ползунковых переменных резистора, размещенные внутри корпуса на его входе и выходе и входящие в состав измерительных ползунных блоков, каждый из которых также включает ползун, на одном конце которого установлен ролик, контактирующий с наружной поверхностью сканируемой трубы, а на другом выполнена резьба, ручку, зафиксированную на ползуне при помощи завинченной на резьбу ползуна гайки и непосредственно связанную с ползунком переменного резистора, цилиндрическую направляющую, необходимую для обеспечения вертикального перемещения ползуна и имеющую на одном конце резьбу, на которую навинчена крышка цилиндрической направляющей, при этом сбоку цилиндрической направляющей выполнен продольный вертикальный вырез, через которую обеспечивается связь ручки с ползунком переменного резистора, при этом цилиндрическая направляющая имеет прямоугольное основание с отверстиями под болты, при помощи которых она закреплена к внутренней поверхности корпуса устройства, измерительный ползунный блок также содержит держатель, посредством которой ползунковый переменный резистор закреплен к ребрам цилиндрической направляющей, пружину сжатия, расположенную во внутренней полости цилиндрической направляющей и одним своим опорным торцом прижатую к ползуну через ручку, а другим - к крышке цилиндрической направляющей через регулировочную шайбу, имеющей выступ, свободно проходящий через вертикальный вырез на цилиндрической направляющей, при этом в качестве датчиков для контроля диаметра и овальности используются потенциометры, входящие в состав измерительных рычажных блоков, каждый из которых включает также основание, к которому закреплен потенциометр, измерительный рычаг, связанный непосредственно с ротором потенциометра, ролик, установленный на одном конце измерительного рычага и контактирующий с наружной поверхностью исследуемой трубы, и пружину растяжения, закрепленную одним своим концом за второй конец измерительного рычага, а другим - за ушко на основании, при этом основание закреплено на стенке корпуса устройства, при этом центраторы в количестве четырех штук размещены равномерно вокруг исследуемой трубы как на входе корпуса, так и на его выходе, при этом каждый центратор включает тягу, размещенную с наружной стороны корпуса устройства и выполненную в виде двух цилиндров разных диаметров, один из которых имеет резьбу, куда навинчена гайка, на опорную поверхность которой через шайбу опирается пружина сжатия одним опорным торцом, а другим опорным торцом - на корпус устройства, а другой, имеющий меньший диаметр, проходит внутри пружины сжатия и установлен с зазором в глухом отверстии, выполненном на корпусе, центрирующую тягу, расположенную внутри корпуса устройства и имеющую на своем свободном конце центрирующий ролик, контактирующий с наружной поверхностью исследуемой трубы, центратор также содержит кулису, имеющую три отверстия, одно из которых расположено в средней части кулисы и имеет форму круга для обеспечения шарнирно-неподвижного соединения с корпусом устройства, а два других расположены по краям кулисы и имеют форму овала для обеспечения шарнирно-подвижного соединения с тягой и центрирующей тягой, при этом кулиса соединена с корпусом устройства, тягой и центрирующей тягой при помощи разъемных вильчатых соединений, при этом входящие в состав каждого вильчатого соединения щеки, имеющиеся у выступающих элементов корпуса, на которые шарнирно-неподвижно установлена кулиса, а также у тяги и центрирующей тяги, имеют полуцилиндрические вырезы, на которые установлены края оси, прикрытой по этим краям двумя крышками, при этом средняя часть оси находится в соответствующем отверстии кулисы, при этом для обеспечения перемещения центрирующего ролика совместно с центрирующей тягой в направлении, перпендикулярном оси сканируемой трубы, предусмотрена направляющая, связанная с центрирующей тягой и закрепленная на кронштейне, установленном на внутренней стенке корпуса, при этом на одном кронштейне закреплены две направляющие, принадлежащие двум смежным (расположенным под углом 90°) центраторам, при этом две направляющие, закрепленные на одном кронштейне, соединены между собой поперечной планкой, при этом в качестве датчика измерения длины трубы используется энкодер, рукоятка которого непосредственно связана с одним из центрирующих роликов, при этом связанный с рукояткой энкодера центрирующий ролик имеет обод с отверстием под рукоятку энкодера, при этом энкодер установлен на держателе, закрепленном при помощи вильчатого соединения на центрирующей тяге, на свободном конце которой установлен связанный с рукояткой энкодера центрирующий ролик.
Сканирование диаметров трубы осуществляется путем непрерывной регистрации потенциометрами угловых положений измерительных рычагов, на свободном конце каждого из которых установлены ролики, контактирующие с наружной поверхностью данной трубы. Овальность трубы определяется путем объединения диаметров, измеренных по меньшей мере в двух плоскостях измерения, проходящих через продольную ось данной трубы.
Сканирование путем регистрации угловых положений рычагов обеспечивает возможность измерения широкого диапазона типоразмеров труб без использования картриджей под каждый типоразмер. Использование дополнительных двух датчиков - ползунковых переменных резисторов - совместно с одним из потенциометров позволяет проводить измерение радиуса кривизны трубы по относительному перемещению трех точек на ее поверхности.
Устройство иллюстрируется следующими чертежами:
На фиг. 1 показано устройство для сканирования геометрии трубы с закрытым и раскрытым корпусом, изометрический вид.
На фиг. 2 - устройство для сканирования геометрии трубы, вид спереди;
На фиг. 3 - устройство для сканирования геометрии трубы, вид сверху;
На фиг. 4 - разрез Б- Б;
На фиг. 5 - разрез Г-Г;
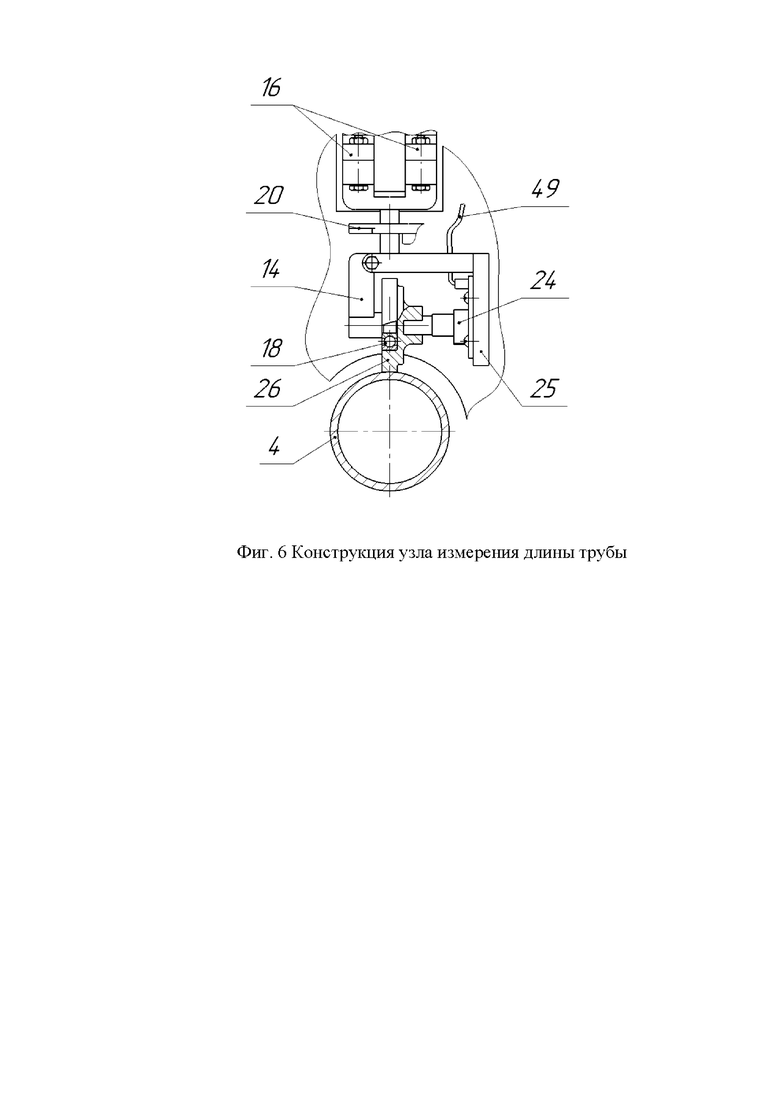
На фиг. 6 - конструкция узла измерения длины трубы;
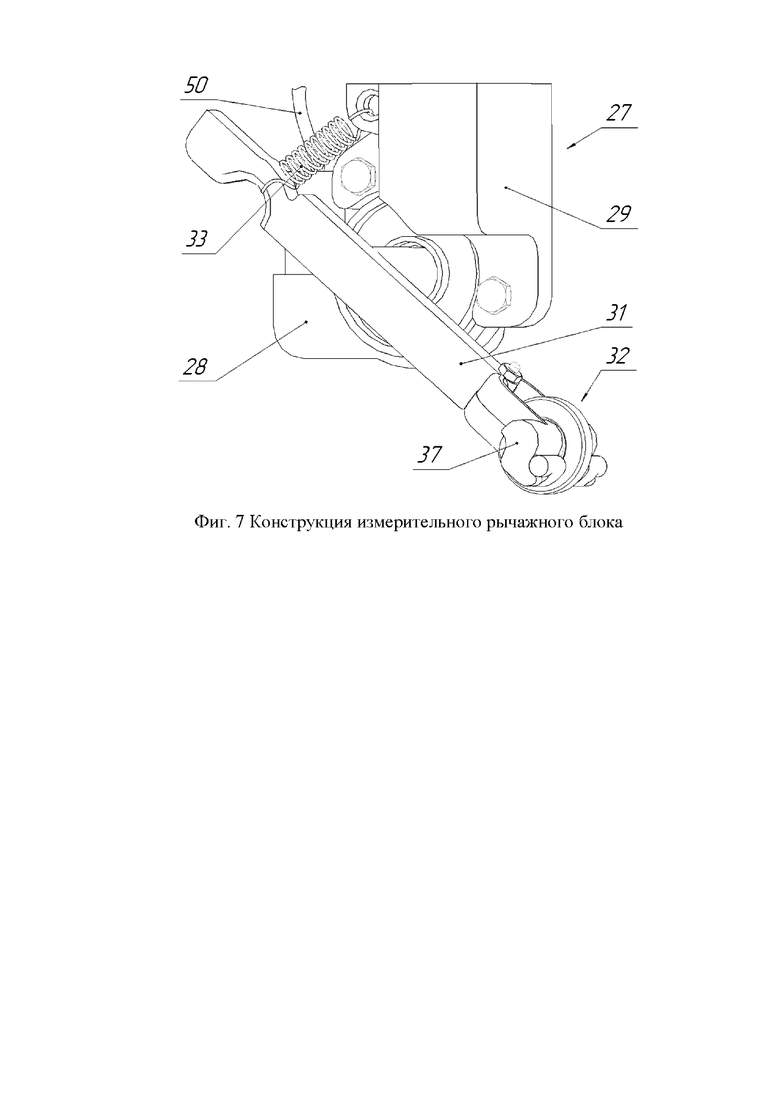
На фиг. 7 - конструкция измерительного рычажного блока;
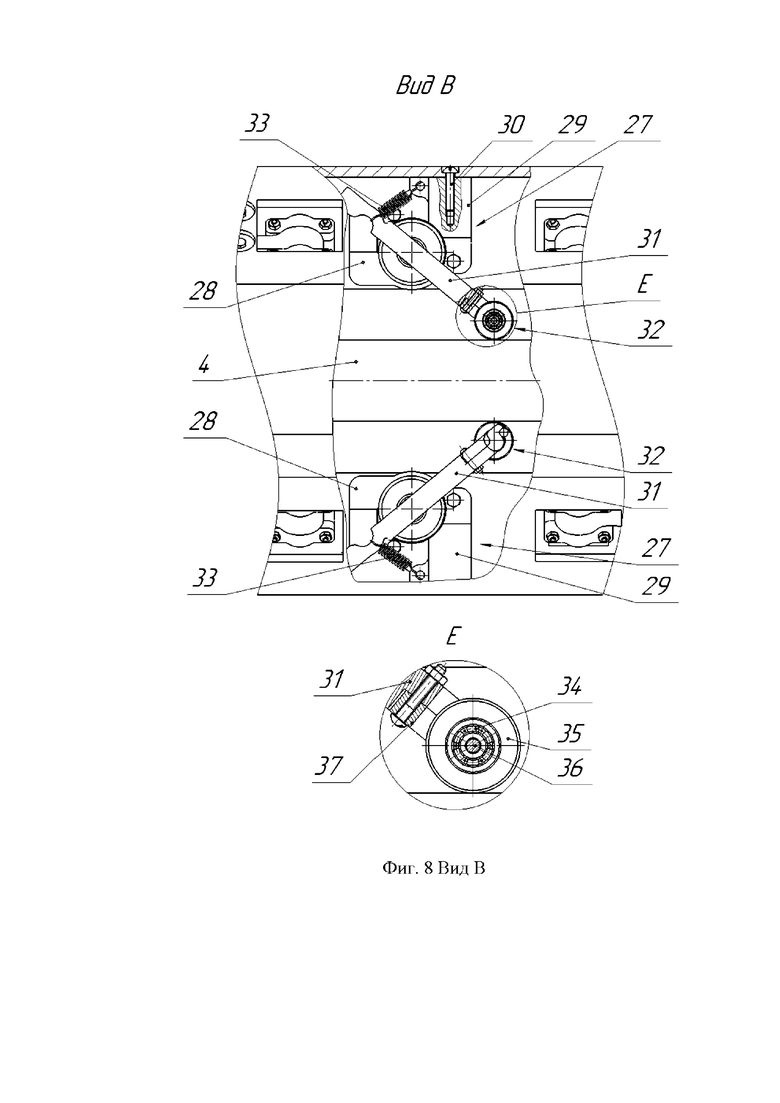
На фиг. 8 - вид В;
На фиг. 9 - конструкция узла контроля кривизны трубы;
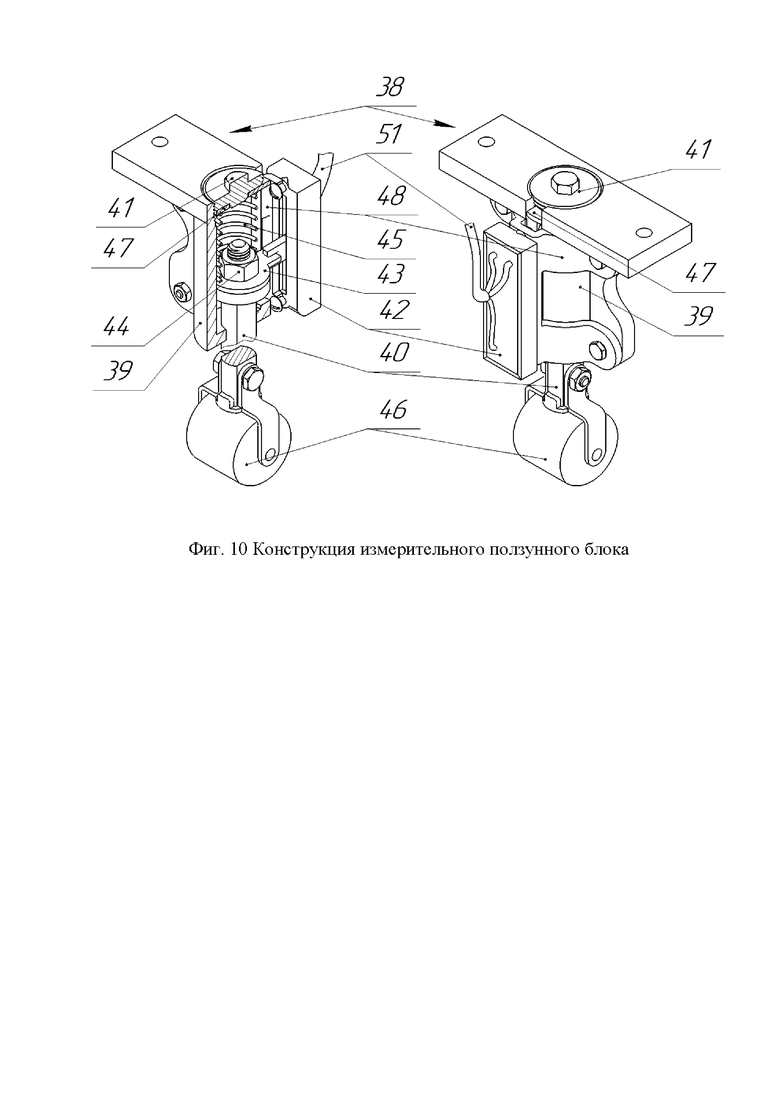
На фиг. 10 - конструкция измерительного ползунного блока;
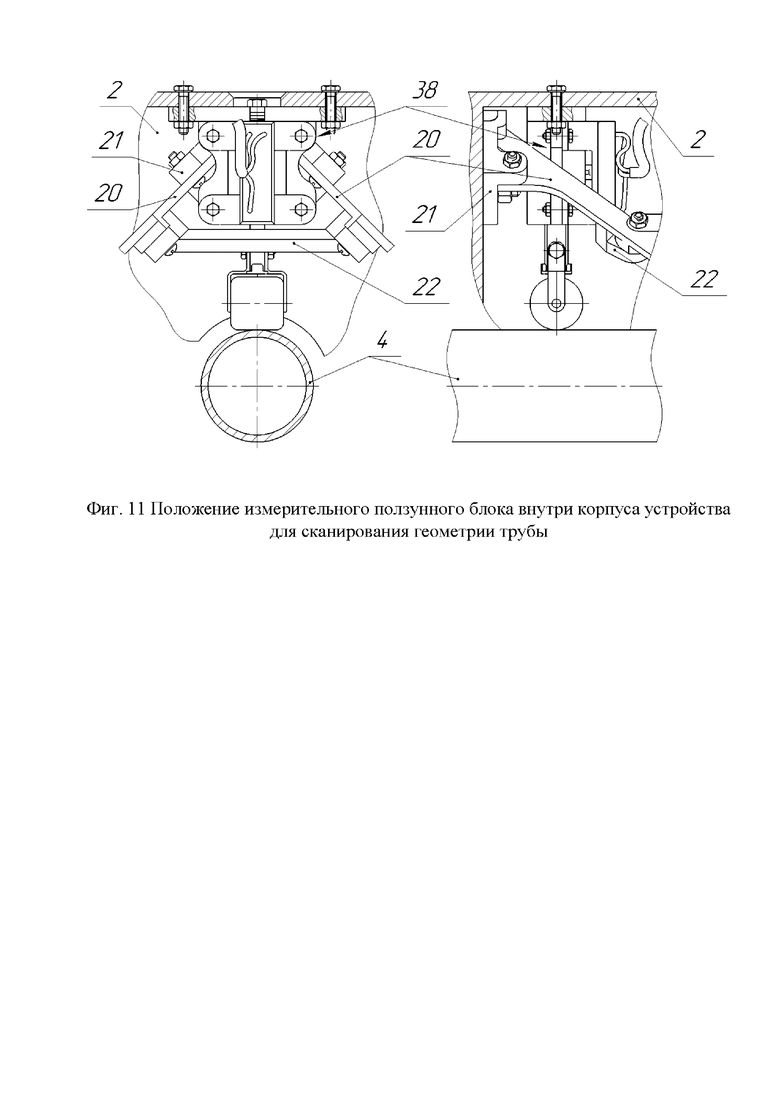
На фиг. 11 - положение измерительного ползунного блока внутри корпуса устройства для сканирования геометрии трубы.
На фиг. 1 и 2 приняты следующие обозначения:
1 - днище корпуса;
2 - крышка корпуса;
3 - шарнир;
4 - сканируемая труба.
5 - защелка;
8 - центратор.
На фиг. 3 приняты следующие обозначения:
2 - крышка корпуса;
3 - шарнир;
4 - сканируемая труба;
5 - защелка;
6 - шарнирный стержень;
7 - штифт;
8 - центратор.
На фиг. 4 приняты следующие обозначения:
4 - сканируемая труба;
13 - кулиса;
14 - центрирующая тяга;
15 - ось вильчатого соединения;
16 - крышка оси вильчатого соединения;
20 - направляющая;
21 - кронштейн;
22 - поперечная планка.
На фиг. 5 приняты следующие обозначения:
9 - тяга;
10 - гайка;
11 - пружина сжатия;
12 - шайба;
13 - кулиса;
14 - центрирующая тяга;
15 - ось вильчатого соединения;
16 - крышка оси вильчатого соединения;
17 - центрирующий ролик;
18 - подшипник ролика центратора;
19 - обод ролика центратора;
20 - направляющая;
21 - кронштейн;
23 - упор кулисы.
На фиг. 6 приняты следующие обозначения:
4 - сканируемая труба;
14 - центрирующая тяга;
16 - крышка оси вильчатого соединения;
18 - подшипник ролика центратора;
20 - направляющая;
24 - энкодер;
25 - держатель;
26 - обод с отверстием под рукоятку энкодера;
49 - кабель энкодера.
На фиг. 7 приняты следующие обозначения:
27 - измерительный рычажный блок.
28 - потенциометр;
29 - основание;
31 - измерительный рычаг;
32 - рычажный ролик;
33 - пружины растяжения;
37 - крышка оси;
50 - кабель потенциометра.
На фиг. 8 приняты следующие обозначения:
4 - сканируемая труба;
27 - измерительный рычажный блок;
28 - потенциометр;
29 - основание;
30 - винт;
31 - измерительный рычаг;
32 - рычажный ролик;
33 - пружина растяжения;
34 - подшипник рычажного ролика;
35 - обод рычажного ролика;
36 - ось;
37 - крышка оси.
На фиг. 9 приняты следующие обозначения:
2 - крышка корпуса;
4 - сканируемая труба;
27 - измерительный рычажный блок;
38 - измерительный ползунный блок.
На фиг. 10 приняты следующие обозначения:
38 - измерительный ползунный блок;
39 - цилиндрическая направляющая;
40 - ползун;
41 - крышка цилиндрической направляющей;
42 - ползунковый переменный резистор;
43 - ручка;
44 - гайка;
45 - пружина сжатия измерительного ползунного блока;
46 - ролик измерительного ползунного блока;
47 - регулировочная шайба;
48 - держатель ползункового переменного резистора;
51 - кабель ползункового переменного резистора.
На фиг. 11 приняты следующие обозначения:
2 - крышка корпуса;
4 - сканируемая труба;
20 - направляющая;
21 - кронштейн;
22 - поперечная планка;
38 - измерительный ползунный блок.
Корпус измерительного устройства состоит из днища 1 (фиг. 1 и 2) и крышки 2 (фиг. 1 и 2), которые соединены между собой при помощи шарнира 3 (фиг. 1 и 2), и имеет на торцах отверстия для прохода сканируемой трубы 4 (фиг. 1 и 2). Для фиксации крышки в закрытом положении предусмотрены защелки 5 (фиг. 1 и 2). Шарнирный стержень 6 (фиг. 3) зафиксирован от осевого смещения при помощи штифта 7 (фиг. 3), установленного с внутренней стороны корпуса.
На входе и выходе корпуса измерительного устройства установлены по четыре центратора 8 (фиг. 3), расположенные друг относительно друга поду углом 90°.
Тяга 9 (фиг. 5) каждого из центраторов имеет резьбу, на которую навинчена гайка 10 (фиг. 5). Пружина 11 (фиг. 5) установлена в предусмотренном для нее пазу в корпусе устройства и прижата к корпусу гайкой 10 (фиг. 5) через шайбу 12 (фиг. 5), диаметр которой больше или равен диаметру пружины 11 (фиг. 5). Каждый центратор также имеет на корпусе устройства соосное с пружиной 11 (фиг. 5) глухое отверстие, в которое введен концевой цилиндрический участок тяги 9 (фиг. 5), не имеющий резьбу, а диаметр его меньше диаметра резьбы на тяге 9 (фиг. 5).
Кулиса 13 (фиг. 4 и 5) каждого из центраторов соединена с корпусом измерительного устройства, тягой 9 (фиг. 5) и центрирующей тягой 14 (фиг. 4 и 5) при помощи разъемных вильчатых соединений. Края оси 15 (фиг. 4 и 5) каждого вильчатого соединения расположены на щеках, имеющих полуцилиндрические вырезы под ось 15 (фиг. 4 и 5), и прикрыты крышками 16 (фиг. 4 и 5), имеющими аналогичные полуцилиндрические вырезы, а средняя часть оси 15 (фиг. 4 и 5) находится в соответствующем отверстии кулисы 13 (фиг. 4 и 5). Такие щеки имеются на тяге 9 (фиг. 5), центрирующей тяге 14 (фиг. 4 и 5), а также на крышке и днище корпуса устройства со внутренней его стороны.
На корпусе измерительного устройства кулиса 13 (фиг. 5) установлена шарнирно-неподвижно, а на ее концах отверстия имеют овальную форму для создания шарнирно-подвижного соединения с тягой 9 (фиг. 5) и центрирующей тягой 14 (фиг. 5), которое необходимо для обеспечения их свободного вертикального перемещения.
На нижнем конце каждой центрирующей тяги 14 (фиг. 5) имеется центрирующий ролик 17 (фиг. 5), который состоит из подшипника качения 18 (фиг. 5) и надетого на его наружное кольцо обода 19 (фиг. 5).
Две направляющие 20 (фиг. 4 и 5) смежных центрирующих тяг 14 (фиг. 4 и 5), расположенных на крышке корпуса измерительного устройства, установлены на одном кронштейне 21 (фиг. 4 и 5), закрепленном при помощи болтового соединения внутри этой крышки на ее торце, и соединены между собой поперечной планкой 22 (фиг. 4). Таким же образом установлены направляющие смежных центрирующих тяг 14 (фиг. 4), расположенных на днище корпуса. Корпус над центрирующей тягой 14 (фиг. 4 и 5) имеет прямоугольный вырез для увеличения ее вертикально хода и удобства сборки центраторов.
Каждая кулиса имеет упор 23 (фиг. 5), являющийся частью корпуса.
Узел измерения длины трубы состоит из по меньшей мере одного датчика измерения длины трубы, в качестве которого используется энкодер 24 (фиг. 6), установленный на держателе 25 (фиг. 6), закрепленном на центрирующей тяге 14 (фиг. 6) посредством вильчатого соединения. Рукоятка энкодера 24 (фиг. 6) расположена соосно с роликом, который вместо обода 19 (фиг. 5) имеет обод 26 (фиг. 6) с отверстием под форму и размеры рукоятки энкодера 24 (фиг. 6).
Узел измерения диаметра и овальности, находящийся в середине корпуса устройства, состоит из четырех равномерно расположенных вокруг сканируемой трубы 4 (фиг. 8) измерительных рычажных блоков 27 (фиг. 7 и 8), каждый из которых состоит из потенциометра 28 (фиг. 7 и 8), установленного при помощи болтового (или винтового) соединения на основании 29 (фиг. 7 и 8), закрепленного к стенке корпуса при помощи двух винтов 30 (фиг. 8), и измерительного рычага 31 (фиг. 7 и 8), который непосредственно связан с ротором потенциометра 28 (фиг. 7 и 8). При этом два смежных измерительных рычажных блока закреплены на крышке корпуса устройства, а другие два - на днище. Одна пара противоположно установленных измерительных рычажных блоков 26 (фиг. 8) расположена в одной плоскости измерения, другая - в плоскости, перпендикулярной плоскости измерения первой пары.
На одном конце измерительного рычага 31 (фиг. 7 и 8) установлен ролик 32 (фиг. 7 и 8), а на другом - пружина растяжения 33 (фиг. 7 и 8). При этом одним концом пружина 33 (фиг. 7 и 8) закреплена за соответствующее место на конце рычага 31 (фиг. 7 и 8), другим - за ушко на основании 29 (фиг. 7 и 8).
Ролик 32 (фиг. 7 и 8) состоит из подшипника 34 (фиг. 8), на наружное кольцо которого надет обод 35 (фиг. 8). Внутренним кольцом подшипник 34 (фиг. 8) в натяг установлен на оси 36 (фиг. 8), которая, в свою очередь, расположена на предусмотренной для нее выемке в рычаге 31 (фиг. 8) и закрыта крышкой 37 (фиг. 8), имеющей аналогичную выемку.
Жесткая фиксация оси 36 (рис.8) в измерительном рычаге 31 (рис.7 и 8) обеспечивается за счет трехточечного соединения с ним крышки 37 (фиг. 7 и 8): одним концом крышка 37 (фиг. 7 и 8) двумя выступающими частями зафиксирована на соответствующих выступающих частях измерительного рычага 31 (фиг. 7 и 8), а другим концом - при помощи болтового соединения. Вместо болтового соединения может быть использован винт, завинченный либо на резьбу, предварительно нарезанную в отверстии измерительного рычага, либо на резьбу, предварительно нарезанную на в отверстии крышки.
Узел контроля кривизны трубы состоит из по меньшей мере двух измерительных ползунных блоков 38 (фиг. 10 и 11), установленных внутри устройства на его входе и выходе, и одного размещенного межу ними измерительного рычажного блока 27 (фиг. 7 и 10). При этом последний входит в состав как вышеуказанного узла, так и узла сканирования диаметра и овальности, чем обеспечивается измерение радиуса кривизны исследуемой трубы в месте измерения ее диаметра в процессе контроля. Данные два измерительных ползунных блока 38 (фиг. 10 и 11) и размещенный между ними один измерительный рычажный блок 27 (фиг. 7 и 10) узла контроля кривизны расположены таким образом, что в процессе сканирования качение их роликов осуществляется по одной образующей исследуемой трубы, а плоскость измерения проходит через ее ось и данную образующую. Для более точного определения отслеживаемого параметра вышеуказанные блоки могут быть продублированы и установлены противоположно относительно оси исследуемой трубы в той же плоскости измерения.
Если плоскость изгиба трубы заранее известна, то для контроля радиуса ее кривизны является достаточным использование одной плоскости измерения, при этом последняя должна совпадать с плоскостью изгиба трубы. Если плоскость изгиба трубы заранее не известна, то для контроля ее кривизны могут быть использованы две плоскости измерения, расположенные под прямым углом, или более двух плоскостей измерения, расположенных друг за другом под равными углами.
Цилиндрическая направляющая 39 (фиг. 11) измерительного ползунного блока 38 (фиг. 11) необходима для обеспечения вертикального перемещения ползуна 40 (фиг. 11) и на одном из своих концов имеет отверстие, которое по форме и размерам соответствует поперечному сечению части ползуна 40 (фиг. 11), имеющей плоские грани, что позволяет исключить его вращение вокруг своей оси во время измерения, а на другом - резьбу, на которую навинчена крышка 41 (фиг. 11). Цилиндрическая направляющая 39 (фиг. 11) также имеет один продольный вертикальный вырез вдоль своей образующей, что дает возможность механически связать ползун 40 (фиг. 11) с ползунком переменного резистора 42 (фиг. 11). Данная связь осуществляется посредством ручки 43 (фиг. 11), которая выполнена в виде шайбы с выступом и зафиксирована при помощи гайки 44 (фиг. 11), завинченной на резьбу, имеющуюся на ползуне 40 (фиг. 11). Выступ ручки 43 (фиг. 11), свободно проходящий через продольный вырез на цилиндрической направляющей 39 (фиг. 11), насажен в паз ползунка переменного резистора 42 (фиг. 11). Для монтажа к стенке корпуса измерительного устройства цилиндрическая направляющая 39 (фиг. 11) имеет прямоугольное основание с отверстиями под болты.
Пружина сжатия 45 (фиг. 11) необходима для обеспечения плотного и постоянного контакта ролика 46 (фиг. 11), установленного на свободном конце ползуна 40 (фиг. 11), с наружной поверхностью исследуемой трубы в процессе ее контроля. Одним своим торцом пружина 45 (фиг. 11) опирается на ручку 43 (фиг. 11), а другим - через регулировочную шайбу 47 (фиг. 11) на крышку 41 (фиг. 11). Внутренняя резьба на цилиндрической направляющей 39 (фиг. 11) предназначена не только для установки крыши 41 (фиг. 11), но и для регулирования усилия пружины 45 (фиг. 11) путем изменения положения крышки 41 (фиг. 11) вдоль оси цилиндрической полости направляющей 39 (фиг. 11). Регулировочная шайба 47 (фиг. 11) так же, как и ручка 43 (фиг. 11), имеет выступ, свободно проходящий через продольный вырез на направляющей 39 (фиг. 11), что позволяет исключить кручение пружины 45 (фиг. 11) вокруг своей оси, которое может возникнуть при ввинчивании или развенчивании крышки 41 (фиг. 11).
Ползунковый переменный резистор 42 (фиг. 11) при помощи винтов установлен на держателе 48 (фиг. 11), который, в свою очередь, закреплен на ребрах цилиндрической направляющей 39 (фиг. 11) при помощи болтовых или винтовых соединений.
Каждый из измерительных ползунных блоков 38 (фиг. 11 и 12) расположен в пространстве между направляющими 20 (фиг. 12) и поперечной планкой 22 (фиг. 12) внутри корпуса измерительного устройства и закреплен к его стенке при помощи болтовых соединений.
Для регулирования усилия пружины 45 (фиг. 11) на корпусе устройства имеется отверстие, диаметр которого соответствует диаметру головки гаечного ключа, используемого для ввинчивания или развенчивания крышки 41 (фиг. 11).
Внутри корпуса на стенке его крышки и/или днища также закреплены батарейный блок (на фиг. не показан), микроконтроллер (на фиг. не показана), с которым связаны посредством кабелей 49 (фиг. 6), 50 (фиг. 7), 51 (фиг. 11) все имеющиеся в устройстве электронные компоненты (потенциометры, ползунковые резисторы и энкодеры) и беспроводной модуль (на фиг. не показан) для приема и передачи данных.
Перед проведением сканирования измерительное устройство путем раскрытия его корпуса, имеющего разъем в плоскости, проходящей через его ось, монтируется на место измерения вокруг сканируемой трубы 4 (фиг. 1). В закрытом состоянии крышка 2 (фиг. 1 и 2) стягивается с днищем 1 (фиг. 1 и 2) при помощи защелок 5 (фиг. 1 и 2).
После монтажа устройства на место измерения проводится настройка центраторов 8 (фиг. 3) и регулировка величины усилия пружины 45 (фиг. 11) каждого из измерительных ползунных блоков 38 (фиг. 10, 11 и 12), которая осуществляется путем перемещения крышки 41 (фиг. 11) по резьбе на цилиндрической направляющей 39 (фиг. 11).
Работа устройства
В процессе измерения сканируемая труба 4 (фиг. 1) перемещается вдоль своей оси внутри неподвижного измерительного устройства, входя в него через отверстие на торце его корпуса.
Центраторы 8 (фиг. 3) обеспечивают соосность исследуемой трубы с осью устройства.
На тягу 9 (фиг. 5) каждого из центраторов усилие передается от установленной соосно с ней пружины 11 (фиг. 5) через гайку 10 (фиг. 5), навинченной на резьбу тяги 9 (фиг. 5). Данное усилие далее предается от тяги 9 (фиг. 5) на центрирующую тягу 14 (фиг. 4 и 5) посредством кулисы 13 (фиг. 5), имеющей шарнирно-неподвижно соединение с корпусом и шарнирно-подвижные соединение с тягами 9 (фиг. 5), 14 (фиг. 4 и 5) при помощи осей 15 (фиг. 4 и 5), закрытых крышками 16 (фиг. 4 и 5).
Таким образом, центрирование трубы происходит за счет прижатия к ее наружной поверхности центрирующих роликов 17 (фиг. 5), установленных на центрирующих тягах 14 (фиг. 4 и 5).
Регулирование величины усилия пружины 11 (фиг. 5) осуществляется во время настройки центраторов 8 (фиг. 3) путем перемещения гайки 10 (фиг. 5) по резьбе на тяге 9 (фиг. 5). Концевой цилиндрический участок тяги 9 (фиг. 5), не имеющий резьбу, служит в качестве направляющей, что дает возможность перемещаться тяге 9 (фиг. 5) только в направлении, перпендикулярном оси сканируемой трубы 4 (фиг. 4).
Направляющие 20 (фиг. 4 и 5) обеспечивают перемещение центрирующих тяг 14 (фиг. 4 и 5) только в направлении, перпендикулярном оси сканируемой трубы 4 (фиг. 4). Поперечная планка 22 (фиг. 4) снижает прогибы соединенных ею направляющих, возникающие вследствие терния в местах их касания с центрирующими тягами 14 (фиг. 4 и 5) во время работы измерительного устройства.
Упор 23 (фиг. 5) кулисы предотвращает соударение центрирующих роликов 17 (фиг. 5) друг о друга после выхода сканируемой трубы 4 (фиг. 4) из измерительного устройства.
Изменение формы наружной поверхности сканируемой трубы ведет к изменению угловых положений измерительных рычагов 31 (фиг. 7 и 8), что регистрируется потенциометрами 28 (фиг. 7 и 8). Пружины 33 (фиг. 7 и 8) обеспечивают постоянный и плотный контакт роликов 32 (фиг. 7 и 8), имеющихся на свободном конце каждого из измерительных рычагов 31 (фиг. 7 и 8), с наружной поверхностью трубы.
Плоскость измерения диаметра сканируемой трубы проходит через ее ось и точки контакта двух противоположно расположенных относительно трубы (под углом 180 ) роликов 32 (фиг. 8) с наружной поверхностью данной трубы. Путем измерения диаметров трубы в двух таких плоскостях, которые расположены под прямым углом друг относительно друга, определяется ее овальность. Таким образом, для определения овальности исследуемой трубы необходимо использовать по меньшей мере четыре равномерно расположенных вокруг нее потенциометра, непосредственно связанных с рычагами, ролики которых находятся в постоянном контакте с наружной поверхностью данной трубы во время измерения.
Измерение радиуса кривизны исследуемой трубы на базовой длине, равной расстоянию межу осями роликов 46 (фиг. 11) блоков 38 (фиг. 10, 11 и 12), расположенных на входе и выходе измерительного устройства, проводится путем определения относительного положения центров всех роликов узла контроля кривизны с учетом их радиусов и диаметра данной трубы, измеренного при помощи узла сканирования диаметра и овальности. В случае изменения кривизны проходящей внутри корпуса устройства сканируемой трубы ролик 46 (фиг. 11) каждого из измерительных ползунных блоков 38 (фиг. 10 и 11), плотно прижимаемый к ее наружной поверхности при помощи пружины 45 (фиг. 11), перемещается вместе с ползуном 40 (фиг. 11) вдоль его оси. Ручка 43 (фиг. 11), закрепленная на ползуне 40 (фиг. 11) при помощи гайки 44 (фиг. 11), сдвигает ползунок переменного резистора 42 (фиг. 11) в соответствующем направлении на величину вертикального сдвига ролика 46 (фиг. 11). В этот момент ползунковый переменный резистор 42 (фиг. 11) регистрирует сигнал, несущий информацию о положении центра ролика 46 (фиг. 11) и посылаемый в систему обработки данных.
Координаты центра ролика 32 (фиг. 7) измерительного рычажного блока 27 (фиг. 7 и 10), входящего в состав узла контроля кривизны, определяются при помощи потенциометра 28 (фиг. 7) путем измерения углового положения рычага 31 (фиг. 7). Зарегистрированный потенциометром 28 (фиг. 7) сигнал также направляется в систему обработки данных. По полученным одновременно значениям сигналов всех блоков узла контроля кривизны трубы определяется относительное расположение центров их роликов, по которому программным методом рассчитывается искомый параметр - радиус кривизны. Все расчеты проводятся автоматически при помощи вычислительной техники в режиме реального времени.
Энкодер 24 (фиг. 6) предназначен для определения вдоль длины исследуемой трубы положений измеренных параметров ее геометрии.
Плата с микроконтроллером принимает сигналы от всех имеющихся в устройстве энкодеров, потенциометров и ползунковых переменных резисторов посредством кабелей 49 (фиг. 6), 50 (фиг. 7) и 51 (фиг. 11) соответственно и посылает получаемые сигналы в систему обработки при помощи беспроводного модуля для приема и передачи данных. Батарейный блок необходим для электрического питания всех имеющихся в устройстве датчиков, беспроводного модуля и микроконтроллера.
Пример.
При помощи заявленного устройства необходимо провести измерение диаметра, овальности и радиуса кривизны трубы, находящейся в состоянии упругого изгиба. Труба изготовлена из материала сталь 20. Наружный диаметр трубы составляет 38 мм, а толщина стенки - 2,5 мм.
Заявленное устройство представляет собой конструкцию, проиллюстрированную на фиг. 1-11, и включает в себя четыре измерительных рычажных блока 27 (фиг. 7), расположенных равномерно вокруг продольной оси исследуемой трубы, два измерительных ползунных блока 38 (фиг. 10), размещенных на входе и выходе устройства согласно фиг. 9, и один энкодер 24 (фиг. 6), установленный в устройстве согласно фиг. 6. При этом плоскость измерения одной пары измерительных рычажных блоков 27 (фиг. 8), установленных друг напротив друга согласно фиг. 8, совпадает с плоскостью изгиба трубы. Плоскость измерения измерительных ползунных блоков 38 (фиг. 9), закрепленных на крышке 2 (фиг. 9) корпуса устройства, также совпадает с плоскостью изгиба трубы.
На крышке корпуса устройства во внутренней его полости закреплен микроконтроллер (на фиг. не показан), с которым соединены кабели от всех имеющихся в устройстве датчиков. При помощи беспроводного модуля для передачи данных микроконтроллер связан с системой обработки и отображения данных, в качестве которой используется персональный компьютер.
Исследуемую трубу в состоянии упругого изгиба пропускают через неподвижное измерительное устройство. Через каждые 5 мм продольного перемещения трубы одновременно определяют ее диаметры, овальность и радиус кривизны. В каждом поперечном сечении трубы измеряют два диаметра в двух перпендикулярных друг другу плоскостях измерения при помощи четырех измерительных рычажных блоков 27 (фиг. 7), равномерно расположенных вокруг продольной оси исследуемой трубы. Каждый измерительный рычажный блок 27 (фиг. 7) при помощи потенциометра 28 (фиг. 7) регистрирует угловое положение измерительного рычага 31 (фиг. 8). По зарегистрированным показаниям двух потенциометров 28 (фиг. 8), входящих в состав установленных друг напротив друга измерительных рычажных блоков 27 (фиг. 8), по известным размерам измерительных рычагов 31 (фиг. 8) и роликов 32 (фиг. 8), а также по известному расстоянию между осями данных потенциометров 28 (фиг. 8) определяют диаметр исследуемой трубы.
По двум диаметрам, определенным в двух перпендикулярных друг другу плоскостях измерения, рассчитывают овальность (в %) по формуле
где dmaj - большее значение измеренного диаметра (большая ось), мм;
dmin - меньшее значение измеренного диаметра (малая ось), мм.
Радиус кривизны исследуемой трубы определяют при помощи двух измерительных ползунных блоков 38 (фиг. 9) и одного измерительного рычажного блока 27 (фиг. 9). Таким образом, показания одного из измерительных рычажных блоков используются как для определения диаметра и овальности, так и для измерения радиуса кривизны трубы.
Регистрация вертикального сдвига ролика 46 (фиг. 10) осуществляется при помощи ползункового переменного резистора 42 (фиг. 10).
Таким образом, по зарегистрированным координатам двух роликов измерительных ползунных блоков 38 (фиг. 9) и одного ролика измерительного рычажного блока 27 (фиг. 9) определяется радиус кривизны исследуемой трубы.
Распределение вдоль длины трубы обследуемых параметров ее геометрии, а именно измеренных значений диаметров, овальности и радиусов кривизны, осуществляется при помощи энкодера 24 (фиг. 6).
В таблице приведены результаты вычислений диаметров dmaj и dmin, овальности и радиуса кривизны исследуемой трубы в зоне ее максимального прогиба и на расстояниях 1,5 м, 2 м и 3 м от зоны максимального прогиба.
Заявленное устройство позволяет проводить контроль диаметра и овальности трубы при помощи более простых и доступных датчиков, а также обеспечивает возможность измерения широкого диапазона типоразмеров труб без использования картриджей под каждый типоразмер, при этом устройство способно в реальном времени определять радиус кривизны сканируемой трубы.
Таблица
Результаты вычислений диаметров dmaj и dmin, овальности и радиуса кривизны исследуемой трубы в зоне ее максимального прогиба и на расстояниях 2 м, 3 м и 4 м от зоны максимального прогиба
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения радиуса кривизны длинномерной трубы и устройство для его осуществления (варианты) | 2021 |
|
RU2790885C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИУСОВ КРИВИЗНЫ, ВЕЛИЧИНЫ ОВАЛЬНОСТИ И ФОРМЫ ПРОФИЛЯ СТАЛЬНЫХ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ БОЛЬШИХ ДИАМЕТРОВ | 2022 |
|
RU2784850C1 |
| УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2018 |
|
RU2690711C1 |
| Прибор для исследования скважин | 1978 |
|
SU763588A1 |
| Рычажное устройство контроля обсадных колонн в скважине | 1984 |
|
SU1239292A1 |
| Устройство для центрирования скважинных приборов | 1983 |
|
SU1154440A1 |
| Устройство для контроля качества цементирования обсадных колонн большого диаметра | 1989 |
|
SU1754890A1 |
| Рычажный прижим для сборки под сварку | 1985 |
|
SU1311897A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Центратор для сборки труб под сварку | 1985 |
|
SU1298028A1 |






Изобретение относится к области исследования технического состояния длинномерных труб. Контроль технического состояния длинномерной трубы проводится путем ее пропуска через неподвижное устройство, в корпусе которого размещен узел сканирования диаметра и овальности, включающий неподвижные датчики. Узел контроля кривизны включает три датчика, расположенные над одной образующей сканируемой трубы, один из которых установлен на входе устройства, другой – на выходе, а третий – размещен между первыми двумя. Допускается кривизну объекта определять в нескольких плоскостях измерения диаметра. Таким образом, датчик входит в состав как узла сканирования диаметра и овальности, так и узла контроля кривизны, чем обеспечивается измерение кривизны исследуемой трубы. На входе и выходе устройства имеются центраторы, равномерно расположенные вокруг трубы и содержащие центрирующие ролики, один из которых непосредственно связан с датчиком узла измерения длины трубы. Достигается определение в режиме реального времени радиуса кривизны контролируемой трубы и получение результатов измерений диаметра и овальности. 11 ил., 1 табл.
Устройство для сканирования геометрии трубы, содержащее корпус, в котором равномерно вокруг исследуемой трубы размещены по меньшей мере четыре датчика для контроля диаметра и овальности, при этом на входе и выходе корпуса установлены центраторы, включающие центрирующие ролики, с одним из которых связан датчик измерения длины трубы, отличающееся тем, что устройство дополнительно содержит расположенные по меньшей мере в одной плоскости измерения диаметра два ползунковых переменных резистора, размещенные внутри корпуса на его входе и выходе и входящие в состав измерительных ползунных блоков, каждый из которых также включает ползун, на одном конце которого установлен ролик, контактирующий с наружной поверхностью сканируемой трубы, а на другом выполнена резьба, ручку, зафиксированную на ползуне при помощи завинченной на резьбу ползуна гайки и непосредственно связанную с ползунком переменного резистора, цилиндрическую направляющую, необходимую для обеспечения вертикального перемещения ползуна и имеющую на одном конце резьбу, на которую навинчена крышка цилиндрической направляющей, при этом сбоку цилиндрической направляющей выполнен вертикальный вырез, через который обеспечивается связь ручки с ползунком переменного резистора, при этом цилиндрическая направляющая имеет прямоугольное основание с отверстиями под болты, при помощи которых она закреплена к внутренней поверхности корпуса устройства, измерительный ползунный блок также содержит держатель, посредством которой ползунковый переменный резистор закреплен к ребрам цилиндрической направляющей, пружину сжатия, расположенную во внутренней полости цилиндрической направляющей и одним своим опорным торцом прижатую к ползуну через ручку, а другим – к крышке цилиндрической направляющей через регулировочную шайбу, имеющей выступ, свободно проходящий через вертикальный вырез на цилиндрической направляющей, при этом в качестве датчиков для контроля диаметра и овальности используются потенциометры, входящие в состав измерительных рычажных блоков, каждый из которых включает также основание, к которому закреплен потенциометр, измерительный рычаг, связанный непосредственно с ротором потенциометра, ролик, установленный на одном конце измерительного рычага и контактирующий с наружной поверхностью исследуемой трубы, и пружину растяжения, закрепленную одним своим концом за второй конец измерительного рычага, а другим – за ушко на основании, при этом основание закреплено на стенке корпуса устройства, при этом центраторы в количестве четырех штук размещены равномерно вокруг исследуемой трубы как на входе корпуса, так и на его выходе, при этом каждый центратор включает тягу, размещенную с наружной стороны корпуса устройства и выполненную в виде двух цилиндров разных диаметров, один из которых имеет резьбу, куда навинчена гайка, на опорную поверхность которой через шайбу опирается пружина сжатия одним опорным торцом, а другим опорным торцом – на корпус устройства, а другой, имеющий меньший диаметр, проходит внутри пружины сжатия и установлен с зазором в глухом отверстии, выполненном на корпусе, центрирующую тягу, расположенную внутри корпуса устройства и имеющую на своем свободном конце центрирующий ролик, контактирующий с наружной поверхностью исследуемой трубы, центратор также содержит кулису, имеющую три отверстия, одно из которых расположено в средней части кулисы и имеет форму круга для обеспечения шарнирно-неподвижного соединения с корпусом устройства, а два других расположены по краям кулисы и имеют форму овала для обеспечения шарнирно-подвижного соединения с тягой и центрирующей тягой, при этом кулиса соединена с корпусом устройства, тягой и центрирующей тягой при помощи разъемных вильчатых соединений, при этом входящие в состав каждого вильчатого соединения щеки, имеющиеся у выступающих элементов корпуса, на которые шарнирно-неподвижно установлена кулиса, а также у тяги и центрирующей тяги, имеют полуцилиндрические вырезы, на которые установлены края оси, прикрытой по этим краям двумя крышками, при этом средняя часть оси находится в соответствующем отверстии кулисы, при этом для обеспечения перемещения центрирующего ролика совместно с центрирующей тягой в направлении, перпендикулярном оси сканируемой трубы, предусмотрена направляющая, связанная с центрирующей тягой и закрепленная на кронштейне, установленном на внутренней стенке корпуса, при этом на одном кронштейне закреплены две направляющие, принадлежащие двум центраторам, расположенным под углом 90° друг относительно друга, при этом две направляющие, закрепленные на одном кронштейне, соединены между собой поперечной планкой, при этом в качестве датчика измерения длины трубы используется энкодер, рукоятка которого непосредственно связана с одним из центрирующих роликов, при этом связанный с рукояткой энкодера центрирующий ролик имеет обод с отверстием под рукоятку энкодера, при этом энкодер установлен на держателе, закрепленном при помощи вильчатого соединения на центрирующей тяге, на свободном конце которой установлен связанный с рукояткой энкодера центрирующий ролик.
| Способ контроля толщины антикоррозионного покрытия стальной трубы, находящейся в производственном потоке | 2019 |
|
RU2720265C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЛЩИНЫ ПОКРЫТИЙ НА ТРУБАХ В ПРОИЗВОДСТВЕННОМ ПОТОКЕ | 2002 |
|
RU2233429C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ НАВЫКАМ ПСИХИЧЕСКОГО РАССЛАБЛЕНИЯ | 1992 |
|
RU2033082C1 |
| JP 2001074633 A, 23.03.2001 | |||
| JP 5107020 A, 27.04.1993. | |||

