Изобретение относится к измерительной технике и может быть использовано для определения кривизны длинномерных труб, в том числе гибких насосно-компрессорных труб колтюбинговых установок.
Известно устройство для измерения радиуса кривизны цилиндрической поверхности крупногабаритных деталей, содержащее корпус, опорно-базирующий узел, включающий измерительную и базирующие ножки, и отсчетное устройство, взаимодействующее с измеряемой поверхностью. Опорные элементы данного устройства закреплены на двух каретках, выполненных с возможностью плавного перемещения вдоль шкалы, нанесенной на боковую поверхность корпуса, для изменения базового расстояния и их фиксации в выбранном положении, при этом концы базирующих ножек выполнены ножеобразными, а их контактная поверхность сориентирована в направлении, перпендикулярном продольной оси корпуса (Патент РФ №95096, МПК G01B 5/213 (2006.01). Опубл. 10.06.2010 г.).
Известно устройство для измерения радиуса кривизны цилиндрической поверхности крупногабаритных деталей, содержащее корпус, опирающийся на измеряемую поверхность с помощью закрепленных по его концам опорных роликов на базовом расстоянии друг от друга, измерительный преобразователь, расположенный на середине базового расстояния, при этом корпус, выполненный с возможностью изменения базового расстояния, содержит прямоугольные сквозные отверстия с вложенными и зафиксированными с помощью стопорных винтов постоянными магнитами, расположенными симметрично относительно измерительного преобразователя по длине корпуса и предназначенными для удержания данного устройства на боковых и нижних участках поверхности исследуемого цилиндрического объекта в процессе измерения (Патент РФ №153456, МПК G01B 11/255 (2006.01). Опубл. 20.07.2015 г. Бюлл. №20).
Вышеупомянутые устройства предназначены главным образом для контроля радиуса окружности цилиндрического объекта в его поперечном сечении. Использование их при определении радиуса кривизны продольной оси длинномерного цилиндрического изделия вызывает определенные затруднения в процессе контроля и повышает длительность измерения, так как получение снимаемых показаний в режиме реально времени в конструкциях данных устройств не реализовано, что является их основным недостатком.
Известен способ определения потенциально опасных участков трубопровода с непроектным уровнем напряженно-деформированного состояния, заключающийся в расчетной оценке изгибных напряжений, выполняемой по данным внутритрубной диагностики, в процессе которой проводится измерение радиусов упругого изгиба трубопровода при помощи перемещающегося в его полости внутритрубного снаряда (Патент РФ №2602327, МПК F16L 1/00 (2006.01). Опубл. 20.11.2016 г. Бюлл. №32).
Оценка изгибных напряжений в материале обследуемого трубопровода по данному способу осуществляется при помощи внутритрубной диагностики, к недостаткам которой относятся большая продолжительность подготовительных работ, проводимых перед процессом контроля, и необходимость в наличии доступа измерительного устройства к внутренней полости трубопровода.
Известен способ измерения радиуса кривизны трубопровода по данным геодезических измерений, при котором формируют опорную прямую в горизонтальной и (или) вертикальной плоскостях, производят измерения с помощью лазерного построителя плоскости, а далее с помощью тахометра и рулетки, минимизируют ошибки геодезических измерений путем проведения определенной процедуры расчета (Патент РФ №2592733, G01B 11/00 (2006.01). Опубл. 27.07.2016 г. Бюлл. №21).
К недостаткам данного способа относятся большая длительность процесса определения кривизны и необходимость для проведения измерений сложных и дорогостоящих измерительных приборов.
Наиболее близким к заявляемому способу является способ определения кривизны рельса под нагруженным колесом, который заключается в том, что непосредственно вблизи нагруженного колеса, перемещаемого с заданной скоростью, определяют относительное перемещение трех точек, расположенных на рабочей поверхности головки рельса, по координатам которых определяют кривизну, изгибающий момент и напряжения от изгиба данного рельса, при этом точность измерения обеспечивают выбором базы измерения и величины осевой нагрузки (Патент РФ № 2108423, B61K 9/08 (1995.01), E01B 35/00 (1995.01)).
Недостатком данного способа является то, что величина обследуемого радиуса кривизны зависит от схемы нагружения исследуемого объекта, неверный выбор которой может привести к недостоверным результатам контроля.
В основу изобретения положена задача разработать способ измерения радиуса кривизны длинномерной трубы и устройство для его осуществления, которые обеспечат получение результатов измерений, не зависящих от схемы нагружения трубы, и позволят проводить измерения без использования справочных значений геометрических характеристик поперечного сечения данной трубы, что приведет к повышению точности измерений.
Для решения поставленной задачи в заявленном способе, заключающемся в непрерывном определении относительного перемещения трех точек, одновременно с определением относительного перемещения трех точек измеряют диаметр исследуемой трубы, при этом измерение относительного перемещения трех точек и диаметра проводят по меньшей мере в одной плоскости измерения, проходящей через продольную ось исследуемой трубы, при этом три точки, относительное перемещение которых подлежит измерению, совпадают с центрами двух роликов и расположенного между ними среднего ролика, которые установлены на определенных расстояниях друг за другом вдоль продольной оси исследуемой трубы и находятся в постоянном контакте с ее наружной поверхностью в процессе контроля, при этом положение центров роликов определяют по показаниям связанных с ними датчиков, а положение среднего ролика определяют по показаниям связанного с ним среднего датчика, при этом диаметр трубы измеряют при помощи установленных друг напротив друга среднего ролика и дополнительного ролика, положение центра которого определяют при помощи дополнительного датчика, затем по относительному расположению трех точек, совпадающих с центрами двух роликов и размещенного между ними среднего ролика, вычисляют радиус окружности, описанной вокруг треугольника, вершины которого находятся на этих трех точках, и определяют направление изгиба трубы на базовом участке, равном расстоянию между центрами двух крайних роликов, далее в зависимости от направления изгиба трубы и с учетом измеренных ранее ее диаметра, радиуса окружности, описанной вокруг треугольника, вершины которого находятся на трех точках, совпадающих с центрами двух роликов и размещенного между ними и среднего ролика, и известному радиусу этих роликов и среднего ролика определяют радиус кривизны оси трубы, при этом в случае ее упругого изгиба дополнительно проводят расчет изгибных напряжений, при этом измерения проводят как при перемещении всех датчиков, в том числе среднего и дополнительного датчиков, вдоль продольной оси неподвижной трубы, так и при продольном перемещении трубы относительно неподвижных датчиков, в том числе среднего и дополнительного датчиков.
Для решения поставленной задачи заявлено устройство, включающее три датчика, расположенных на определенных расстояниях друг за другом вдоль продольной оси исследуемой трубы, при этом устройство состоит из корпуса, в котором размещены все три датчика, среди которых средний датчик расположен в средней части корпуса на произвольном расстоянии от одного из крайних датчиков, и дополнительный датчик, установленный напротив среднего датчика, при этом все датчики входят в состав блоков контроля расстояния, каждый из которых включает также тягу, на одном конце которой установлен ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом средний датчик входит в состав среднего блока контроля расстояния, который также включает тягу, на одном конце которой установлен средний ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом дополнительный датчик входит в состав дополнительного блока контроля расстояния, установленного напротив среднего блока контроля расстояния, при этом дополнительный блок контроля расстояния включает также тягу, на одном конце которой установлен дополнительный ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом устройство включает как минимум один измеритель длины, связанный с роликом, средним роликом, или дополнительным роликом.
В первом варианте устройства в качестве датчиков, среднего датчика и дополнительного датчика используются ползунковые резисторы, подвижный элемент каждого из которых соединен с соответствующей тягой.
Во втором варианте устройства в качестве датчиков, среднего датчика и дополнительного датчика применяются бесконтактные датчики расстояния, при этом устройство дополнительно снабжается кареткой, необходимой для отражения сигнала датчика расстояния в обратном направлении.
В качестве измерителя длины используется энкодер или импульсный датчик.
Заявленный способ при помощи заявляемого устройства осуществляет автоматизированное решение геометрической задачи, в которой ось исследуемой трубы на базовом участке, равном расстоянию между центрами наиболее удаленных роликов, качение которых в процессе контроля происходит в одной плоскости измерения по одной образующей данной трубы, представляет собой окружность с радиусом, подлежащим измерению. Такое решение освобождает величины контролируемых параметров от их зависимости от схемы нагружения. Использование дополнительного блока контроля расстояния совместно блоком контроля расстояния, размещенного в средней части корпуса устройства, позволяет сканировать диаметр упругой длинномерной трубы на участке измерения ее кривизны, что дает возможность определять напряжения изгиба в материале трубы без учета справочных значений геометрических характеристик поперечного сечения этой трубы.
Технический результат заявляемого изобретения состоит в повышении точности измерений, достигаемый путем максимальной минимизации количества исходных данных, учитываемых в процессе контроля.
Минимизация количества исходных данных осуществляется при помощи заявленных способа и устройства, которые позволяют в режиме реального времени по меньшей мере в одной плоскости измерения определять кривизну длинномерной трубы путем автоматизированного решения геометрической задачи, в которой ось исследуемой трубы на базовом участке, равном расстоянию между центрами наиболее удаленных роликов, качение которых в процессе контроля происходит в данной плоскости измерения по одной образующей данной трубы, представляет собой окружность с измеряемым радиусом. Определение диаметра трубы в плоскости измерения ее кривизны позволяет проводить контроль без учета осевого момента инерции, момента сопротивления и других геометрических характеристик поперечного сечения данной трубы.
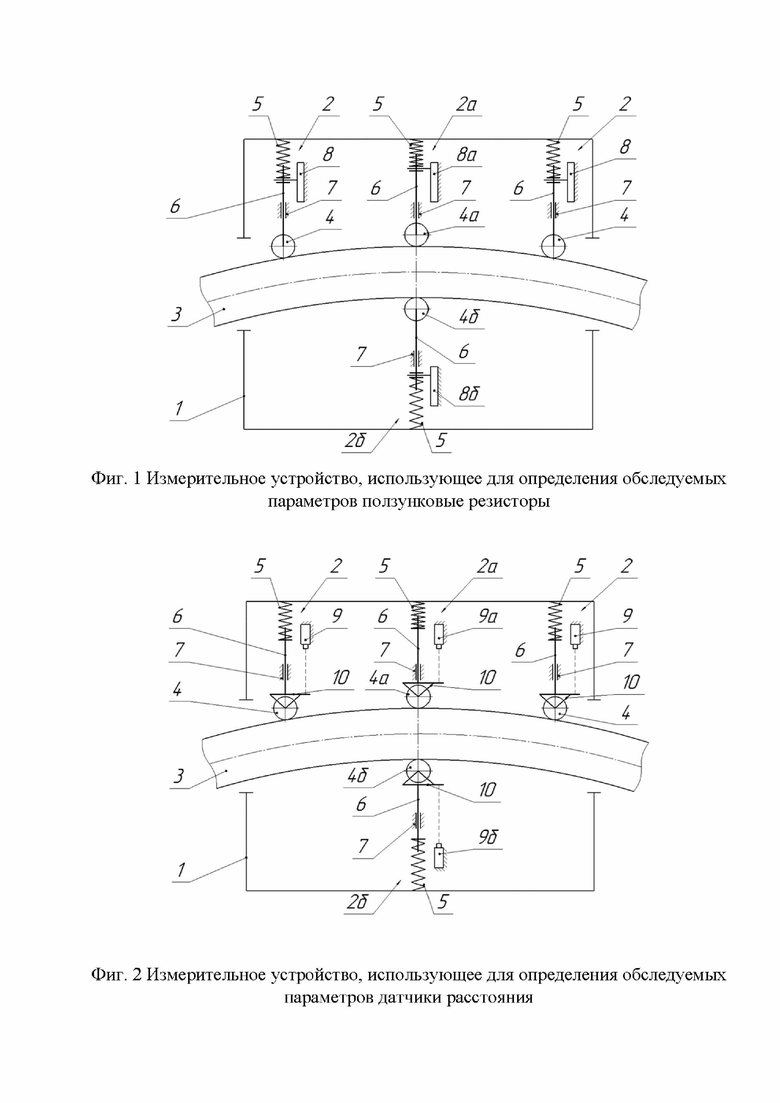
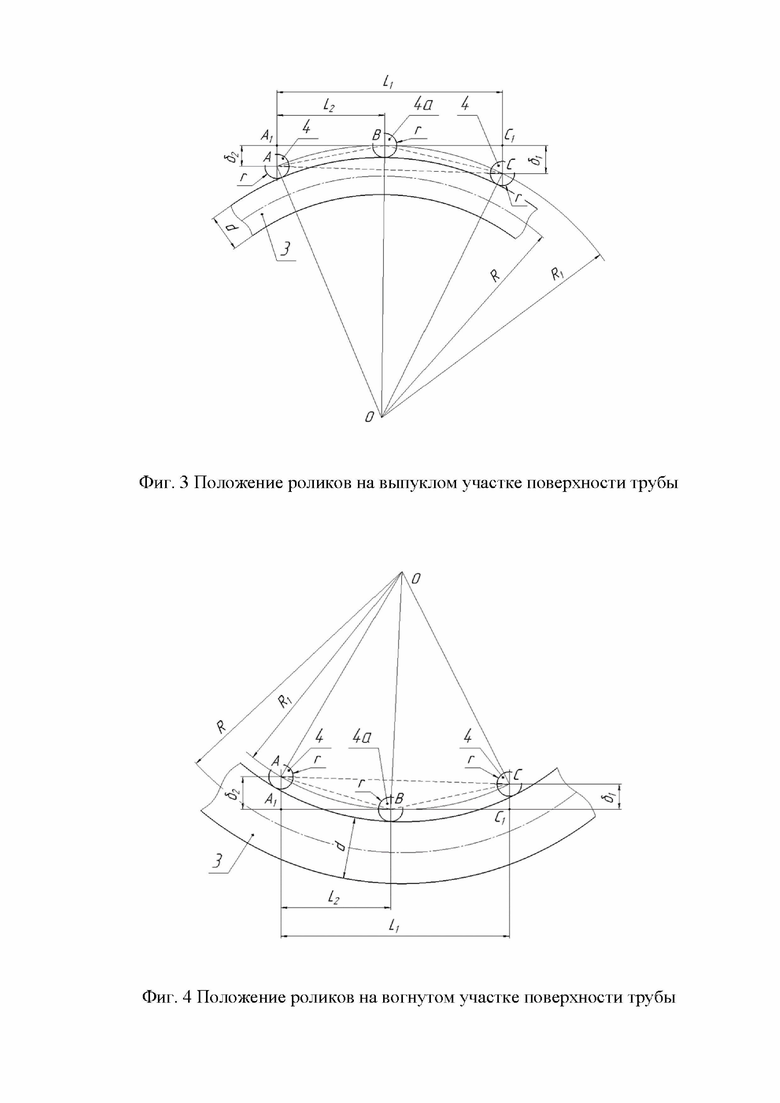
На фиг. 1 представлено измерительное устройство, использующее для определения обследуемых параметров ползунковые резисторы. На фиг. 2 представлено измерительное устройство, использующее для определения обследуемых параметров датчики расстояния. На фиг. 3 представлено положение роликов на выпуклом участке поверхности трубы. На фиг. 4 представлено положение роликов на вогнутом участке поверхности трубы.
На фиг. 1 приняты следующие обозначения:
1 - корпус;
2 - блоки контроля расстояния;
2а - средний блок контроля расстояния;
2б - дополнительный блок контроля расстояния;
3 - труба;
4 - ролик;
4а - средний ролик;
4б - дополнительный ролик;
5 - пружина;
6 - тяга;
7 - направляющая;
8 - датчик (ползунковый резистор);
8а - средний датчик (ползунковый резистор);
8б - дополнительный датчик (ползунковый резистор).
На фиг. 2 приняты следующие обозначения:
1 - корпус;
2 - блок контроля расстояния;
2а - средний блок контроля расстояния;
2б - дополнительный блок контроля расстояния;
3 - труба;
4 - ролик;
4а - средний ролик;
4б - дополнительный ролик;
5 - пружина;
6 - тяга;
7 - направляющая;
9 - датчик расстояния;
9а - средний датчик расстояния;
9б - дополнительный датчик расстояния;
10 - каретка.
Устройство содержит корпус 1 (фиг. 1 и 2), в котором как минимум в одной плоскости измерения, проходящей через продольную ось исследуемой трубы 3 (фиг. 1 и 2), установлены блоки контроля расстояния 2 (фиг. 1 и 2), средний блок контроля расстояния 2а (фиг. 1 и 2), размешенный между блоками контроля расстояния 2 (фиг. 1 и 2) на произвольном расстоянии от одного из них, и дополнительный блок контроля расстояния 2б (фиг. 1 и 2), расположенный напротив среднего блока контроля расстояния 2а (фиг. 1 и 2) относительно оси исследуемой трубы 3 (фиг. 1 и 2).
В одном из вариантов выполнения конструкции данного устройства каждый из блоков контроля расстояния 2 (фиг. 1) состоит из тяги 6 (фиг. 1), на одном конце которого установлен ролик 4 (фиг. 1), направляющей 7 (фиг. 1), необходимой для обеспечения свободного перемещения тяги 6 (фиг. 1) только в направлении, перпендикулярном продольной оси корпуса 1 (фиг. 1), датчика - ползункового резистора 8 (фиг. 1). На другой конец тяги 6 (фиг. 1) опирается один опорный торец пружины 5 (фиг. 1), также входящей в состав блока контроля расстояния 2 (фиг. 1). Второй опорный торец пружины 5 (фиг. 1) опирается на внутреннюю поверхность корпуса 1 (фиг. 1) или другую деталь (на фиг. 1 не показана), зафиксированную от перемещений. Ползунок резистора 8 (фиг. 1), корпус которого является неподвижным, жестко связан с тягой 6 (фиг. 1).
Средний блок контроля расстояния 2а (фиг. 1), состоящий из среднего ролика 4а (фиг. 1), тяги 5 (фиг. 1), направляющей 6 (фиг. 1), пружины 7 (фиг. 1) и среднего датчика 8а (фиг. 1) имеет ту же конструкцию и размеры, что и блок контроля расстояния 2 (фиг. 1).
Дополнительный блок контроля расстояния 2б (фиг. 1), состоящий из дополнительного ролика 4б (фиг. 1), тяги 5 (фиг. 1), направляющей 6 (фиг. 1), пружины 7 (фиг. 1) и дополнительного датчика 8б (фиг. 1) имеет ту же конструкцию и размеры, что и блок контроля расстояния 2 (фиг. 1).
В другом варианте выполнения конструкции измерительного устройства каждый из блоков контроля расстояния 2 (фиг. 2) состоит из тяги 6 (фиг. 2), на одном конце которого установлена каретка 10 (фиг. 2), имеющая ролик 4 (фиг. 2), направляющей 7 (фиг. 2), необходимой для обеспечения свободного перемещения тяги 6 (фиг. 2) только в направлении, перпендикулярном продольной оси корпуса 1 (фиг. 2), неподвижного датчика расстояния 9 (фиг. 2). На другой конец тяги 6 (фиг. 2) опирается один опорный торец пружины 5 (фиг. 2), также входящей в состав блока контроля расстояния 2 (фиг. 2). Второй опорный торец пружины 5 (фиг. 2) опирается на внутреннюю поверхность корпуса 1 (фиг. 2) или другую деталь (на фиг. 2 не показана), зафиксированную от перемещений.
Средний блок контроля расстояния 2а (фиг. 2), состоящий из среднего ролика 4а (фиг. 2), тяги 5 (фиг. 2), направляющей 6 (фиг. 2), пружины 7 (фиг. 2), каретки 10 (фиг. 2) и среднего датчика расстояния 9а (фиг. 2) имеет ту же конструкцию и размеры , что и блок контроля расстояния 2 (фиг. 2).
Дополнительный блок контроля расстояния 2б (фиг. 2), состоящий из дополнительного ролика 4б (фиг. 2), тяги 5 (фиг. 2), направляющей 6 (фиг. 2), пружины 7 (фиг. 2), каретки 10 (фиг. 2) и дополнительного датчика расстояния 9б (фиг. 2) имеет ту же конструкцию и размеры , что и блок контроля расстояния 2 (фиг. 2).
Все ролики 4 (фиг. 1 и 2), средний ролик 4а (фиг. 1 и 2) и дополнительный ролик 4б (фиг. 1 и 2) одинаковы по радиусу.
Устройство также имеет как минимум один измеритель длины (на фиг. 1 и 2 не показан), связанный с одним из роликов 4 (фиг. 1 и 2), или средним роликом 4а (фиг. 1 и 2), или дополнительным роликом 4б (фиг. 1 и 2).
В качестве измерителя длины (на фиг. 1 и 2 не показан) может быть применен энкодер (на фиг. 1 и 2 не показан), закрепленный на тяге 6 (фиг. 1 и 2) или на каретке 10 (фиг. 2), ротор которого связан роликом.
В качестве альтернативы энкодеру может быть использован импульсный датчик (на фиг. 1 и 2 не показан), представляющий собой магнитоэлектрический узел.
Способ заключается в следующем.
Измерения проводят при продольном перемещении исследуемой длинномерной трубы через неподвижное измерительное устройство или при перемещении измерительного устройства вдоль оси неподвижной трубы.
В процессе измерения при помощи блоков контроля расстояния 2 (фиг. 1 и 2) и расположенного между ними среднего блока контроля расстояния 2а (фиг. 1 и 2), которые установлены в корпусе 1 (фиг. 1 и 2) измерительного устройства, непрерывно определяют взаимное расположение центров двух крайних роликов 4 (фиг. 1 и 2) и среднего ролика 4а (фиг. 1 и 2), каждый их которых находится в постоянном и плотном контакте с наружной поверхностью трубы 3 (фиг. 1 и 2), обеспечиваемом при помощи пружины 5 (фиг. 1 и 2) посредством тяги 6 (фиг. 1 и 2), имеющей возможность двигаться только в направлении, перпендикулярном продольной оси корпуса 1 (фиг. 1 и 2) измерительного устройства, что обеспечивается при помощи направляющей 7 (фиг. 1 и 2). Непрерывное определение взаимного расположения центров роликов 4 (фиг. 1 и 2) и среднего ролика 4а (фиг. 1 и 2) проводят путем регистрации сигналов неподвижных датчиков. В качестве этих датчиков могут применяться ползунковые резисторы 8 (фиг. 1) и 8а (фиг. 1) или бесконтактные датчики расстояния 9 (фиг. 2) и 9а (фиг. 2), определяющие положения центров роликов 4 (фиг. 2) и 4а (фиг. 2) путем измерения расстояний до соответствующих кареток 10 (фиг. 2).
Одновременно с определением взаимного расположения центров роликов 4 (фиг. 1 и 2) и среднего ролика 4а (фиг. 1 и 2) измеряют диаметр трубы при помощи среднего блока контроля расстояния 2а (фиг. 1 и 2) и дополнительного блока контроля расстояния 2б (фиг. 1 и 2).
Затем в каждой плоскости измерения по взаимному расположению центров двух роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 3 и 4) определяют радиус окружности, описанной вокруг треугольника, вершины которого совпадают с центрами двух роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 3 и 4), и направление изгиба трубы 3 (фиг. 3 и 4), которое на базовом участке, равном расстоянию между центрами роликов 4 (фиг. 3 и 4), может быть определено как «выпуклость по отношению к роликам», или «вогнутость по отношению к роликам», или «отсутствие кривизны».
В одном из вариантов расчета радиус R1 окружности, описанной вокруг треугольника, вершины которого совпадают с центрами двух крайних роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 3 и 4) может быть вычислен по формуле

где L1 - расстояние между центрами крайних роликов 4 (фиг. 3 и 4);
δ1 - вертикальное смещение крайнего правого ролика 4 (фиг. 3 и 4) относительно среднего ролика 4а (фиг. 3 и 4), которое определяется по разности показаний соответствующих датчиков;
δ2 - вертикальное смещение крайнего левого ролика 4 (фиг. 3 и 4) относительно среднего ролика 4а (фиг. 3 и 4), которое определяется по разности показаний соответствующих датчиков;
L 2 - расстояние между центрами крайнего левого ролика 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 3 и 4).
В данном случае функция синуса в знаменателе вышеуказанного выражения заключено под знак модуля с целью получения только положительных значений результатов вычислений.
В одном из вариантов расчета направление изгиба трубы 3 (фиг. 3 и 4) на базовом участке, равном расстоянию между центрами крайних роликов 4 (фиг. 3 и 4) может быть определено по величине угла < ABC (фиг. 3 и 4), рассчитываемому по формуле

При этом, если < ABC будет больше π, что соответствует фиг. 3, то труба 3 (фиг. 3) будет идентифицирована, как выпуклая по отношению к роликам 4 (фиг. 3), если < ABC будет меньше π, что соответствует фиг. 4, то форма изгиба трубы 3 (фиг. 4) будет распознана, как вогнутая по отношению к роликам 4 (фиг. 4), если < ABC будет равен π, то форма трубы будет распознана, как прямая, т.е. не имеющая кривизну на базовом участке.
Далее по известному радиусу окружности, описанной вокруг треугольника, вершины которого совпадают с центрами роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 1 и 2), известному диаметру исследуемой трубы 3 (фиг. 3 и 4), известному направлению ее изгиба и известным радиусам роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 1 и 2) вычисляют радиус кривизны оси трубы 3 (фиг. 3 и 4), совпадающей с так называемой нейтральной плоскостью.
При этом, согласно фиг. 3, радиус кривизны оси «выпуклой по отношению к роликам» трубы 3 (фиг. 3) составляет
R = R1 - 0,5 d - r,
где d - диаметр трубы, определенный при помощи установленных друг напротив друга среднего ролика и дополнительного ролика, положения центров которых определяют по показаниям соответственно среднего датчика и дополнительного датчика;
r - величина радиуса каждого из роликов 4 (фиг. 3 и 4).
При этом, согласно фиг. 4, радиус кривизны оси «вогнутой по отношению к роликам» трубы 3 (фиг. 4) составляет
R = R1 + 0,5 · d + r.
При этом радиус кривизны трубы, которая не имеет изгиба на базовом участке, равном расстоянию между центрами двух роликов 4 (фиг. 3 и 4), равен бесконечности.
Далее параметры, определенные в более чем одной плоскости измерения, объединяют с целью получения общего радиуса кривизны трубы.
В случае упругого изгиба дополнительно определяют изгибные напряжения по формуле
где E - модуль упругости материала исследуемой длинномерной трубы.
Распределение вдоль длины трубы измеренных значений всех обследуемых параметров, а именно радиусов кривизны, диаметров и изгибных напряжений в ее материале, определяют при помощи измерителя длины (на фиг. 1 и 2 на показан) в качестве которого может использоваться энкодер (на фиг. 1 и 2 не показан) или импульсный датчик (на фиг. 1 и 2 не показан), формирующий в процессе контроля импульсы при вращении прижатого к поверхности трубы ролика так, чтобы при прохождении им по поверхности данной трубы определенного отрезка пути приходился один импульс.
Пример.
На нескольких участках вдоль трубы, находящейся в состоянии упругого изгиба, предложенным способом необходимо провести измерения ее радиусов кривизны и изгибных напряжений, возникающих в ее материале. Наружный диаметр исследуемой трубы составляет 38 мм, а толщина стенки - 3 мм. Труба изготовлена из стали 20 (модуль продольной упругости Е = 206 ГПа)
Трубу 38×3 в состоянии упругого изгиба пропускают через неподвижное измерительное устройство, конструкция которого соответствует схеме на фиг. 1. В качестве измерителя длины (на фиг. 1 не показан) используется энкодер (на фиг. 1 не показан).
Радиус каждого из роликов 4 (фиг. 3 и 4) и среднего ролика 4а (фиг. 3 и 4) составляет r = 10 мм. Размеры L1 (фиг. 3 и 4) и L2 (фиг. 3 и 4) равны соответственно 200 мм и 100 мм. Величины δ1 (фиг. 3 и 4) и δ2 (фиг. 3 и 4) определяются по мере продольного перемещения исследуемой трубы через неподвижное устройство по показаниям ползунковых резисторов 8 (фиг. 1) и 8а (фиг. 1)
Радиус кривизны и изгибные напряжения в ее материале определяются автоматически при помощи персонального компьютера, используемого для обработки результатов измерений, по следующим зависимостям.
Для расчета радиуса R1 (фиг. 3 и 4) используется формула

Направление изгиба трубы определяется по величине угла < ABC (фиг. 3 и 4), рассчитываемой по формуле
Радиус кривизны оси R (фиг. 3 и 4) трубы вычисляется в зависимости от направления ее изгиба по формуле
R = R1 ± (0,5d + r).
Знак «-» ставится в том случае, когда труба является выпуклой по отношению к роликам 4 (фиг. 3) и 4а (фиг. 3), т.е. при < ABC > π, а знак «+» ставится в том случае, когда труба является вогнутой по отношению к роликам 4 (фиг. 4) и 4а (фиг. 4), т.е. при < ABC < π.
Диаметр d трубы определяется при помощи установленных друг напротив друга среднего ролика 4а (фиг. 1) и дополнительного ролика 4б (фиг. 1), положения центров которых определяют по показаниям соответственно среднего датчика 8а (фиг. 1) и дополнительного датчика 8б (фиг. 1).
Изгибные напряжения рассчитываются по формуле
В таблице приведены результаты вычислений радиусов кривизны трубы 38×3 и изгибных напряжений в зоне ее максимального прогиба и на расстояниях 1,5 м и 3 м от зоны максимального прогиба.
Изобретение позволяет измерять радиус кривизны длинномерной трубы и изгибные напряжения в ее материале без учета коэффициентов, определяющих схему ее нагружения, и справочных величин геометрических характеристик поперечного сечения исследуемой трубы.
Результаты вычислений радиусов кривизны трубы 38×3 и изгибных напряжений в зоне ее максимального прогиба и на расстояниях 1,5 м и 3 м от зоны максимального прогиба
Группа изобретений относится к измерительной технике для определения радиусов кривизны длинномерных труб. Устройство для измерения радиуса кривизны длинномерной трубы включает три датчика, расположенных на определенных расстояниях друг за другом вдоль продольной оси исследуемой трубы. Устройство состоит из корпуса, в котором размещены все три датчика, среди которых средний датчик расположен в средней части корпуса на произвольном расстоянии от одного из крайних датчиков, и дополнительный датчик, установленный напротив среднего датчика. Датчики входят в состав блоков контроля расстояния, каждый из которых включает также тягу, на одном конце которой установлен ролик, направляющую и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений. Дополнительный блок контроля расстояния установлен напротив среднего блока контроля расстояния. Устройство включает как минимум один измеритель длины, связанный с роликом, или средним роликом, или дополнительным роликом. Достигается повышение точности измерений радиуса кривизны длинномерной трубы. 2 н. и 6 з.п. ф-лы, 4 ил. 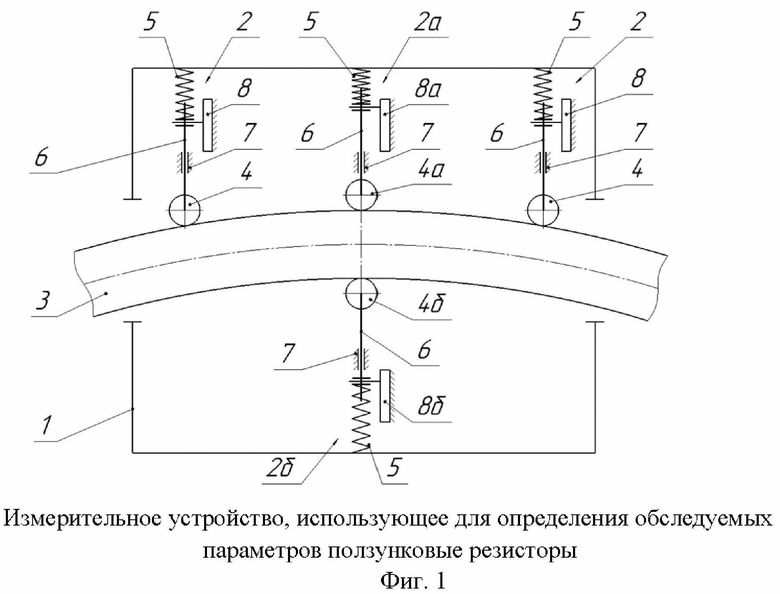
1. Способ измерения радиуса кривизны длинномерной трубы, заключающийся в непрерывном определении относительного перемещения трех точек, отличающийся тем, что одновременно с определением относительного перемещения трех точек измеряют диаметр исследуемой трубы, при этом измерение относительного перемещения трех точек и диаметра проводят по меньшей мере в одной плоскости измерения, проходящей через продольную ось исследуемой трубы, при этом три точки, относительное перемещение которых подлежит измерению, совпадают с центрами двух роликов и расположенного между ними среднего ролика, которые установлены на определенных расстояниях друг за другом вдоль продольной оси исследуемой трубы и находятся в постоянном контакте с ее наружной поверхностью в процессе контроля, при этом положение центров роликов определяют по показаниям связанных с ними датчиков, а положение среднего ролика определяют по показаниям связанного с ним среднего датчика, при этом диаметр трубы измеряют при помощи установленных друг напротив друга среднего ролика и дополнительного ролика, положение центра которого определяют при помощи дополнительного датчика, затем по относительному расположению трех точек, совпадающих с центрами двух роликов и размещенного между ними среднего ролика, вычисляют радиус окружности, описанной вокруг треугольника, вершины которого находятся на этих трех точках, и определяют направление изгиба трубы на базовом участке, равном расстоянию между центрами двух крайних роликов, далее в зависимости от направления изгиба трубы и с учетом измеренных ранее ее диаметра, радиуса окружности, описанной вокруг треугольника, вершины которого находятся на трех точках, совпадающих с центрами двух роликов и размещенного между ними среднего ролика, и по известному радиусу этих роликов и среднего ролика определяют радиус кривизны оси трубы, при этом в случае ее упругого изгиба дополнительно проводят расчет изгибных напряжений, при этом измерения проводят как при перемещении всех датчиков, в том числе среднего и дополнительного датчиков, вдоль продольной оси неподвижной трубы, так и при продольном перемещении трубы относительно неподвижных датчиков, в том числе среднего и дополнительного датчиков.
2. Способ измерения радиуса кривизны длинномерной трубы по п.1, отличающийся тем, что радиус кривизны оси трубы рассчитывают по формуле

где L1 - расстояние между центрами двух крайних роликов;
δ 1 - вертикальное смещение крайнего правого ролика относительно среднего ролика, которое определяется по разности показаний соответствующих датчиков;
δ 2 - вертикальное смещение крайнего левого ролика относительно среднего ролика, которое определяется по разности показаний соответствующих датчиков;
L 2 - расстояние между центрами крайнего левого ролика и среднего ролика;
d - диаметр трубы, определенный при помощи установленных друг напротив друга среднего ролика и дополнительного ролика, положения центров которых определяют по показаниям соответственно среднего датчика и дополнительного датчика,
r - величина радиуса каждого из роликов,
при этом после первого слагаемого, представленного в данном выражении в виде дроби, указывают знак «-» в том случае, если труба является выпуклой по отношению к роликам, а знак «+» - в том случае, если труба является вогнутой по отношению к роликам.
3. Способ измерения радиуса кривизны длинномерной трубы по п.1, отличающийся тем, в случае упругого изгиба изгибные напряжения рассчитывают по формуле
где E - модуль упругости материала исследуемой длинномерной трубы;
d - диаметр трубы, определенный при помощи установленных друг напротив друга среднего ролика и дополнительного ролика, положения центров которых определяют по показаниям соответственно среднего датчика и дополнительного датчика;
R - радиус кривизны оси трубы.
4. Устройство для измерения радиуса кривизны длинномерной трубы, включающее три датчика, расположенных на определенных расстояниях друг за другом вдоль продольной оси исследуемой трубы, отличающееся тем, что устройство состоит из корпуса, в котором размещены все три датчика, среди которых средний датчик расположен в средней части корпуса на произвольном расстоянии от одного из крайних датчиков, и дополнительный датчик, установленный напротив среднего датчика, при этом датчики входят в состав блоков контроля расстояния, каждый из которых включает также тягу, на одном конце которой установлен ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом средний датчик входит в состав среднего блока контроля расстояния, который включает также тягу, на одном конце которой установлен средний ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом дополнительный датчик входит в состав дополнительного блока контроля расстояния, установленного напротив среднего блока контроля расстояния, при этом дополнительный блок контроля расстояния включает также тягу, на одном конце которой установлен дополнительный ролик, направляющую, необходимую для обеспечения свободного перемещения тяги только в направлении, перпендикулярном продольной оси корпуса, и пружину, один опорный торец которой опирается на другой конец тяги, а второй - на внутреннюю поверхность корпуса или другую деталь, зафиксированную от перемещений, при этом устройство включает как минимум один измеритель длины, связанный с роликом, или средним роликом, или дополнительным роликом.
5. Устройство для измерения радиуса кривизны длинномерной трубы по п.4, отличающееся тем, что в качестве датчиков, среднего датчика и дополнительного датчика используются ползунковые резисторы, подвижный элемент каждого из которых соединен с соответствующей тягой.
6. Устройство для измерения диаметра и радиуса кривизны длинномерной трубы по п.4, отличающееся тем, что в качестве датчиков, среднего датчика и дополнительного датчика используются бесконтактные датчики расстояния, при этом устройство дополнительно снабжено кареткой.
7. Устройство для измерения радиуса кривизны длинномерной трубы по п.4, отличающееся тем, что в качестве измерителя длины используется энкодер.
8. Устройство для измерения радиуса кривизны длинномерной трубы по п.4, отличающееся тем, что в качестве измерителя длины используется импульсный датчик.
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВИЗНЫ РЕЛЬСА ПОД НАГРУЖЕННЫМ КОЛЕСОМ, ИЗГИБАЮЩЕГО МОМЕНТА, НАПРЯЖЕНИЙ ОТ ИЗГИБА РЕЛЬСА, ОТНОСИТЕЛЬНОЙ ЖЕСТКОСТИ И МОДУЛЯ УПРУГОСТИ ПОДРЕЛЬСОВОГО ОСНОВАНИЯ | 1994 |
|
RU2108423C1 |
| Устройство для первичной сепарации пара в паровозных котлах | 1944 |
|
SU66511A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИУСА КРИВИЗНЫ ТРУБОПРОВОДА ПО ДАННЫМ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2592733C2 |
| Способ измерения радиуса кривизныизгибАЕМОй зАгОТОВКи | 1976 |
|
SU653801A1 |

