Изобретение относится к области экспериментальной техники в авиастроении, а также может быть использовано в машиностроении, приборостроении и предназначено для экспериментального изучения жесткостных и демпфирующих свойств гибких стержневых элементов конструкций перспективных летательных аппаратов, в том числе со сложной внутренней структурой. Знание этих свойств необходимо для разработки нового оборудования для авиационной и ракетно-космической техники. Жесткостные и демпфирующие характеристики гибких стержневых элементов, полученные с помощью данной установки, так же могут быть использованы для решения задач энергетики, оптоволоконной техники, строительства и многих других приложений гражданского и военного назначения.
С помощью данной экспериментальной установки определяются зависимости кривизны изгиба гибких стержневых элементов от величин краевых изгибающих моментов, а также устанавливаются зависимости углов закручивания торцевых сечений гибких стержневых элементов относительно друг друга от величин краевых крутящих моментов [1]. На заявляемой установке могут быть исследованы недлинные гибкие элементы как в виде сплошных однородных, неоднородных, композитных стержней, так и проволочные конструкции в виде проводов, тросов и кабелей воздушных линий электропередачи. Полученные на установке зависимости позволяют установить изгибные и крутильные жесткости гибких элементов, а также характеристики диссипации энергии деформирования в их структуре.
Следует отметить, что определение таких параметров представляет значительный интерес для задач динамики проводов и тросов воздушных линий электропередачи [2-11]. Знание этих параметров необходимо при расчете и проектировании устройств демпфирования колебаний, моделирования вибраций и колебаний проводов и тросов воздушных линий электропередачи под действием ветровой нагрузки и сил тяжести. Но из-за сложной многопроволочной структуры провода (троса) возникают известные проблемы в оценках его жесткостей, а также внутреннего трения. Например, для расчета изгибной и крутильной жесткостей в инженерной практике используются два предположения о совместимости деформирования проволок. Они «полярны» по смыслу, определяя нижнюю и верхнюю границы теоретической оценки [4-6]. Одно из них основывается на предположении, что проволоки деформируются независимо друг от друга. Второе - на гипотезе связанного деформирования, когда проволочные спирали мысленно жестко соединяются в одно целое, образуя своеобразный стержень. Однако расчеты показывают [6], что использование таких предположений может приводить к различию в результатах более чем в 70 раз. Кроме того, изгибная жесткость изменяется по мере деформации провода, поскольку повивы (слои из проволочных спиралей) провода могут проскальзывать относительно друг друга, а отдельные проволоки перемещаются внутри повивов. Следовательно, величина изгибной жесткости изменяется как вдоль провода, так и во времени [8].
Известна установка для испытания образцов материалов на изгиб [12], содержащая основание, установленную на нем поворотную платформу, захват образца, закрепленный на платформе, два центробежных груза, предназначенные для закрепления на концах образца, привод вращения платформы, включающий вал с приводом вращения, пару катков, установленных по разные стороны от оси вращения платформы и предназначенных для фрикционного взаимодействия с ней.
Известна также подобная установка [13], содержащая основание, установленную на нем поворотную платформу, захват образца, закрепленный на платформе, два центробежных груза, предназначенные для закрепления на концах образца, привод вращения платформы, включающий вал с приводом вращения, пару катков, установленных с эксцентриситетом по разные стороны от оси вращения платформы и предназначенных для фрикционного взаимодействия с ней, один из которых установлен на валу.
В патенте [14] предлагается расширение функциональных возможностей установки путем обеспечения испытаний как при знакопеременном изгибе в двух плоскостях, так и при знакопеременном изгибе в одной плоскости и знакопостоянном изгибе во второй плоскости, а также при круговом изгибе и круговом изгибе с растяжением.
Общим недостатком перечисленных изобретений является то, что на них невозможно обеспечить условия, приближенные к чистому изгибу образцов и проводить испытания на кручение. В этих установках представляют большие затруднения измерения углов поворота сечений образцов и прикладываемых сил. Их можно получить только косвенными методами с помощью вычислений.
Получение чистого изгиба предлагается на установках, описанных в стандарте Великобритании [15] ASTM Е251-92 (2009) и стандарте США [16]. Нагружение балки осуществляется гирями, что не позволяет изменять знак изгибающего момента без переворота балки. На установках невозможно также проводить испытания образцов на кручение.
Известна установка для получения чистого изгиба балки постоянного сечения [17], которая принимается за прототип настоящего изобретения. Это изобретение относится к области метрологии, а именно к средствам получения чистого изгиба эталонной балки для испытаний тензодатчиков. Устройство содержит станину, установленную в ней эталонную балку с системой измерения деформаций, систему нагружения балки с контактными роликами и движителем. Станина выполнена в виде стойки с закрепленной на ней горизонтальной распорной балкой, по концам которой установлены цилиндрические шарниры, служащие осями подвеса двух вертикально расположенных симметричных рычагов, нижние концы рычагов шарнирно соединены посредством противоположно направленных соосных тяг с общим для них дифференциальным «плавающим» движителем. В верхней части каждого рычага попарно сверху и снизу от эталонной балки установлены четыре опорных ролика. Между роликами и эталонной балкой, также сверху и снизу, размещены «подушки» в виде плоских пластин с полуцилиндрическими выступами на противоположных краях, контактирующих с эталонной балкой непосредственно по образующим цилиндрических поверхностей этих выступов, а точки контакта опорных роликов с плоскими сторонами пластин-«подушек» попарно находятся на соответствующих нормалях к плоской поверхности пластин-«подушек».
Основными недостатками указанного изобретения являются: возникновение поперечных сил в сечениях балки вследствие наличия прямолинейных участков испытуемой балки в метах закрепления, невозможность проведения испытаний образцов на кручение. С использованием описанной установки можно испытывать достаточно жесткие образцы при малых деформациях. Чистый изгиб реализуется приближенно, однако это вполне достаточно для тарировки тензодатчиков. Однако эта установка не применима для измерения жесткостей на изгиб и кручение, а также получения гистерезисных зависимостей между силовыми и кинематическими параметрами гибких образцов.
Авторы настоящего изобретения ставили перед собой конкретную задачу разработки новой установки для определения механических свойств гибких стержневых элементов, позволяющей определять зависимости кривизны изгиба стержневых элементов от величин краевых изгибающих моментов, а также устанавливать зависимости относительных углов закручивания торцевых сечений гибких стержневых элементов относительно друг друга от величин краевых крутящих моментов при различных программах изменения изгибающих или крутящих моментов. Вышеуказанный положительный практический результат был достигнут за счет новой совокупности существенных признаков предложенной установки для определения механических свойств гибких стержневых элементов, представленной в нижеследующей формуле изобретения: «установка для определения механических свойств гибких стержневых элементов состоит из жесткого силового каркаса, выполненного в виде, по меньшей мере, двух вертикальных опор, скрепленных внизу с основанием или полом, или опорной рамой, и горизонтальной балки, жестко соединенной с опорами, при этом в горизонтальной балке выполнены, по крайней мере, два сквозных паза, предназначенных для перемещения и закрепления двух шарнирных узлов, расположенных на некоторых расстояниях от торцов балки; к шарнирным узлам прикреплены две металлические штанги в виде трубок, имеющие возможность свободно вращаться в плоскости силового каркаса; на внешних концах штанг, выходящих сверху за пределы каркаса, закреплены электроприводы, создающие на своем валу момент, необходимый для обеспечения изгиба или кручения исследуемого гибкого стержневого элемента; с валом каждого электропривода скреплен длинный стержень, проходящий внутри штанги и передающий исследуемому гибкому стержневому элементу момент от электропривода, который усиливается посредством, по меньшей мере, одноступенчатого червячного редуктора, состоящего из червяка, червячного колеса, жестко скрепленного с концом исследуемого гибкого стержневого элемента и установленного в корпусе редуктора на подшипниках; в каждом шарнирном узле установлен датчик угла поворота штанги относительно ее начального вертикального положения; в механизме каждого червячного редуктора установлены датчик угла поворота червячного колеса относительно его начального положения, когда краевого момента нет или он близок к нулю и ось исследуемого гибкого элемента максимально спрямлена, и датчик момента, возникающего в результате сопротивления изгибу или кручению исследуемого гибкого стержневого элемента; жесткое соединение горизонтальной балки с опорами выполнено посредством болтов или сварки; шарнирные узлы закрепляются в сквозных пазах горизонтальной балки посредством болтовых соединений; исследуемый гибкий стержневой элемент своими концами жестко скреплен с червячными колесами посредством болтовых или винтовых креплений; на каждой штанге расстояние между местом крепления электропривода и шарнирным узлом подбирается из условия равенства нулю моментов весов всех элементов конструкции штанги относительно оси шарнирного узла, но без учета веса исследуемого гибкого стержневого элемента; в экспериментах измеряют моменты M, изгибающие гибкий стержневой элемент, углы γ отклонения осей штанг от вертикали и углы ϕ поворота краевых значений гибкого стержневого элемента от их начального положения; схема нагружения гибкого стержневого элемента и его закрепление реализует напряженно-деформированное состояние, близкое к чистому изгибу, при этом кривизна гибкого стержневого элемента вычисляется по формуле: k=1/R=2(ϕ-γ)/l, где R - радиус кривизны, l - длина гибкого стержневого элемента или расстояние между узлами крепления гибкого стержневого элемента к червячным колесам; при исследовании изгиба гибкого стержневого элемента строятся зависимости кривизны k от величины краевого изгибающего момента M; при исследовании кручения гибкого стержневого элемента строятся зависимости относительного угла закручивания краевых сечений относительно друг друга θ=Δϕкр/l, где Δϕкр - угол поворота одного сечения относительно другого, от величины скручивающего момента Mкр.
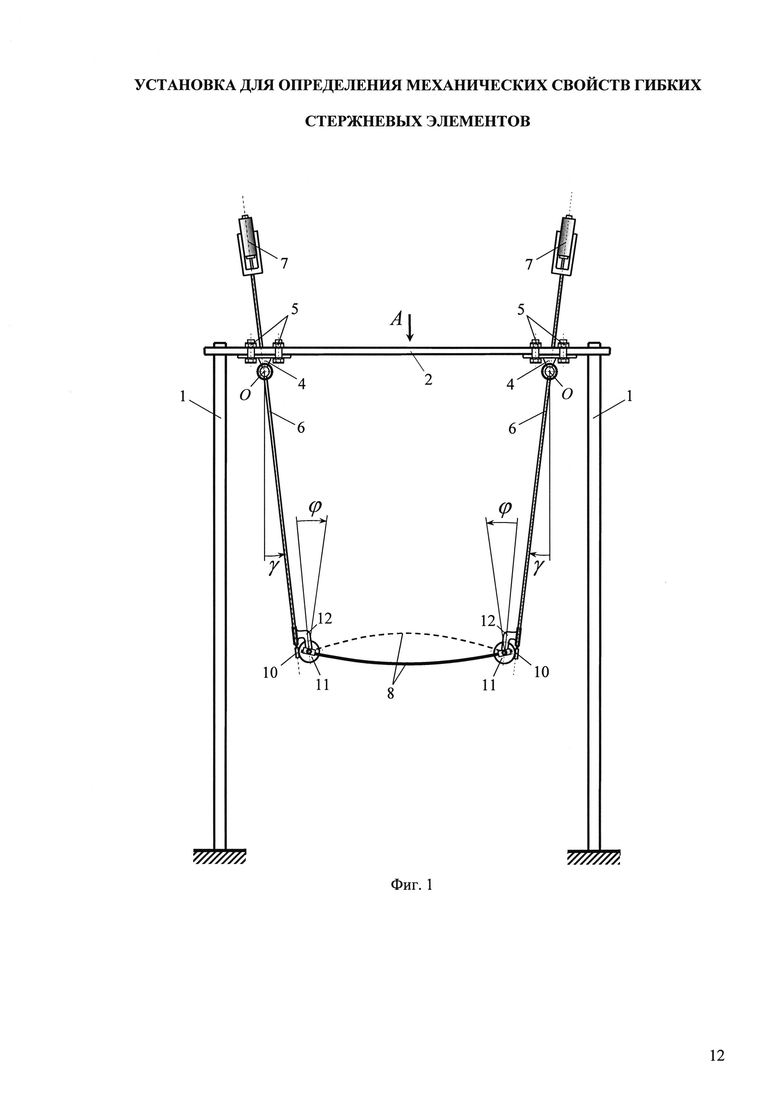
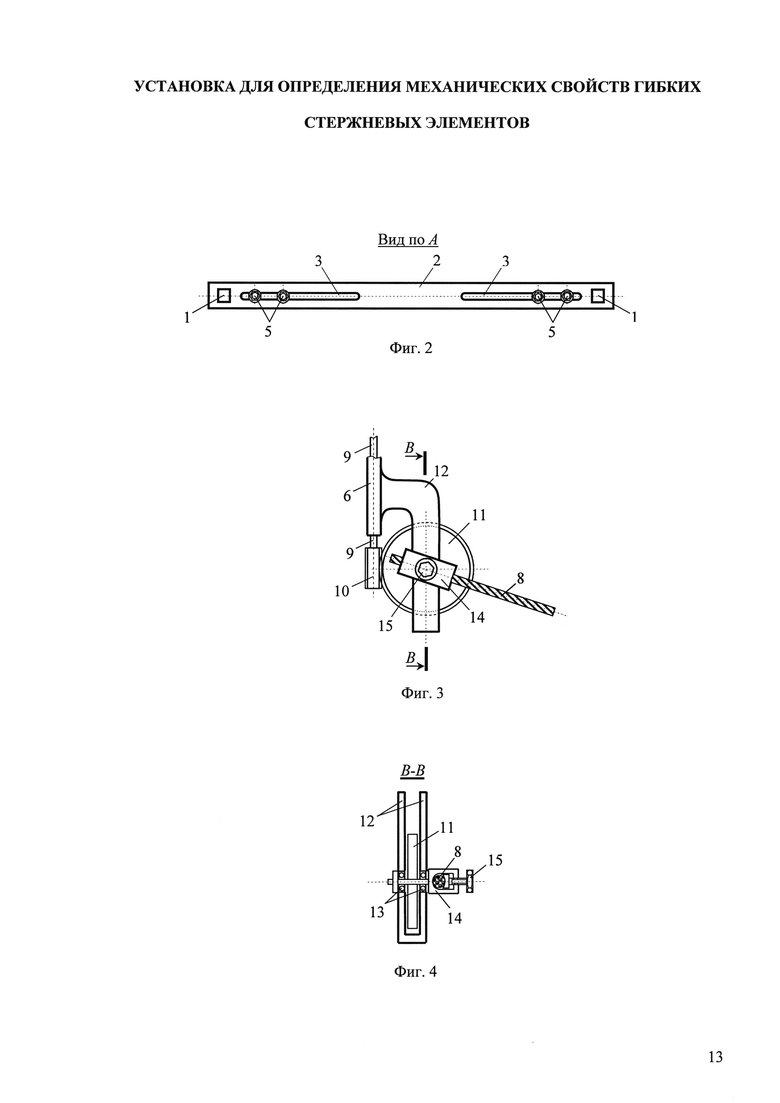
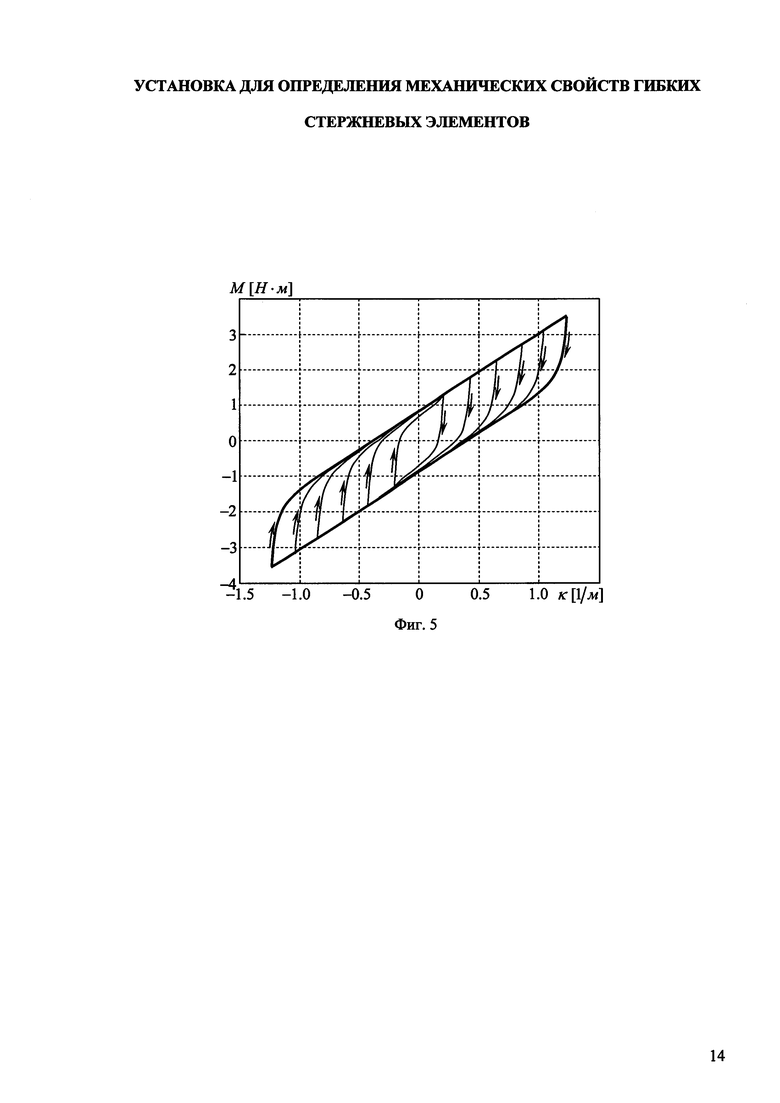
Сущность изобретения иллюстрируется на чертежах, где на фиг. 1 - общий вид установки для определения механических свойств гибких стержневых элементов, выполненной согласно настоящему изобретению; на фиг. 2 - вид сверху по стрелке A на фиг. 1; на фиг. 3 - общий вид крепления гибкого элемента к червячному колесу на фиг. 1; на фиг. 4 - сечение по B-B на фиг. 3; на фиг. 5 - зависимость (кривизна) тросовых элементов со сложной внутренней структурой, имеющая петлеобразный характер, свойственный гистерезисным процессам.
Заявляемая установка для определения механических свойств гибких стержневых элементов (фиг. 1) имеет жесткий силовой каркас в виде, например, двух вертикальных опор 1, скрепляемых внизу с основанием или полом, опорной рамой или каким-то иным аналогичным по своему функциональному назначению устройством, и горизонтальной балки 2, жестко связанной с опорами 1, например, с помощью болтов или сварки. Вид балки 2 по стрелке A на фиг. 1 (вид сверху) отдельно показан на фиг. 2.
В горизонтальной балке 2 вырезаются, например, два сквозных паза 3, предназначенные для крепления, соответственно, двух шарнирных узлов 4 посредством болтов 5 на некоторых расстояниях от торцов горизонтальной балки 2. К шарнирным узлам 4 крепятся две металлические штанги 6 в виде трубок так, чтобы они могли свободно вращаться относительно осей, проходящих через точки О шарнирного крепления металлических штанг 6 к горизонтальной балке 2 перпендикулярно вертикальной плоскости фиг. 1. На внешних выходящих за пределы горизонтальной балки 2 концах штанг 6 крепятся шаговые или иного типа электроприводы 7, создающие на своем валу момент, необходимый для изгиба или закручивания исследуемого гибкого стержневого элемента 8.
Момент от каждого электропривода 7 передается к исследуемому гибкому стержневому элементу 8 посредством длинного стержня 9, скрепляемого с валом электропривода 7 и проходящего внутри штанги 6, а также, по меньшей мере, с одноступенчатым червячным редуктором, усиливающим момент. Червячный редуктор состоит из червяка 10, червячного колеса 11, которое устанавливается в корпусе 12 на подшипниках 13. Исследуемый гибкий стержневой элемент 8 по своим концам жестко скрепляется с червячными колесами 11 с помощью болтовых или винтовых креплений по схеме фиг. 4.
На каждой штанге 6 расстояние между местом крепления электропривода 7 и осью шарнирного узла 4, проходящей через точку О, подбирается из условия равенства нулю моментов (относительно оси шарнирного узла 4) весов всех деталей конструкции (электропривода 7, червячного редуктора, деталей крепежа и прочих деталей), скрепляемых со штангой 6, но без учета веса исследуемого гибкого стержневого элемента 8.
Изобретение работает следующим образом: процедура измерения кривизны гибкого стержневого элемента состоит в следующем. Начала болты 5 раскручиваются для обеспечения перемещения шарнирных узлов 4 вдоль пазов 3. Между осями шарнирных узлов 4 устанавливается расстояние, примерно равное длине исследуемого гибкого стержневого элемента 8. Затем исследуемый гибкий стержневой элемент 8 устанавливается по своим концам в узлах крепления 14 посредством затяжки болтов или винтов 15. После этого корректируется расстояние между осями шарнирных узлов 4 так, чтобы металлические штанги 6 висели вертикально (параллельно друг другу). После такой корректировки болты 5 затягиваются для обеспечения прочности соединения шарнирных узлов 4 с горизонтальной балкой 2.
Программным или ручным способом задается программа изменения момента М во времени. При подаче электрического напряжения на электроприводы 7 они сообщают через червячную передачу моменты, заставляющие исследуемый гибкий стержневой элемент 8 изгибаться или закручиваться. В процессе нагружения измеряются моменты М, изгибающие или скручивающие исследуемый гибкий стержневой элемент 8, а также углы γ отклонения осей штанг 6 от вертикали и углы ϕ поворота краевых сечений исследуемого гибкого стержневого элемента 8 от их начального положения.
Значения моментов M и углов поворота γ и ϕ, полученные датчиками для обеих штанг 6, осредняются.
Предложенная схема нагружения гибкого стержневого элемента и его закрепление реализует напряженно-деформированное состояние, близкое к чистому изгибу, при этом кривизна гибкого стержневого элемента вычисляется по следующей формуле: k=1/R=2(ϕ-γ)/l, где R - радиус кривизны, l - длина гибкого стержневого элемента или расстояние между узлами крепления гибкого стержневого элемента к червячным колесам.
При исследовании изгиба гибких стержневых элементов со сложной внутренней структурой зависимости k=k(M) имеют петлеобразный характер, свойственный гистерезисным процессам. Например, эти зависимости для тросовых элементов имеют вид, показанный на фиг. 5 [11].
При исследовании кручения червячные редукторы устанавливаются так, чтобы плоскости червячных колес 11 оказались параллельными друг другу и перпендикулярными оси исследуемого гибкого стержня. В этом случае исследуемый гибкий стержневой 8 прикрепляется своими концами к осям вращения червячных колес 11, например, с помощью болтовых или винтовых креплений, описанных выше.
Возможны различные способы скручивания исследуемого гибкого стержневого элемента. Например, электроприводы могут создавать моменты кручения одновременно. При этом их валы должны вращаться в противоположных направлениях, обеспечивая скручивание исследуемого гибкого стержневого элемента.
Можно также осуществлять скручивание одним электроприводом, зафиксировав вращение вала другого электропривода. В результате строятся зависимости относительного угла закручивания θ=Δϕ/l, где Δϕ - угол поворота одного сечения относительно другого, от скручивающего момента Мкр: θ=θ(Мкр).
Заявляемая экспериментальная установка для определения механических свойств гибких стержневых элементов имеет отношение проектированию и производству новых устройств и оборудования, в которых используются гибкие стержневые элементы. Особенно это актуально при разработке сплошных однородных, неоднородных, композитных стержней, а также проволочных конструкций типа проводов и тросов воздушных линий электропередачи. Получаемые на предлагаемой установке зависимости позволяют корректно определять изгибные и крутильные жесткости гибких стержневых элементов, а также характеристики диссипации энергии деформирования в их структуре, например, в гасителях вибрации и пляски, распорках-гасителях, спиральных протекторах и другой линейной арматуре.
Источники информации:
[1] Шалашилин В.И., Горшков А.Г., Трошин В.Н. Сопротивление материалов. - М.: Изд-во МАИ, 2000. - 615 с.
[2] Бошнякович А.Д. Механический расчет проводов и тросов линий электропередачи. - Л.: Энергия, 1971. - 295 с.
[3] Глазунов А.А. Основы механической части воздушных линий электропередачи. Т. 1. Работа и расчет проводов и тросов. - М.-Л.: Госэнергоиздат, 1956. - 192 с.
[4] Шкапцов В.А. Методические указания по типовой защите от вибрации и субколебаний проводов и грозозащитных тросов воздушных линий электропередачи напряжением 35-750 кВ. - М.: СПО «ОРГРЕС», 1991. - 68 с.
[5] Колебания проводов воздушных линий под воздействием ветра. Учебно-справочное пособие. Часть 1. Усталостная прочность. Вибрация. Под ред. Виноградова А.А. - М.: Электросетьстройпроект, 2005. - 185 с.
[6] Виноградов А.А., Данилин А.Н., Рабинский Л.Н. Деформирование многослойных проволочных конструкций спирального типа. Математическое моделирование, примеры использования. Под ред. Данилина А.Н. - М.: Изд-во МАИ, 2014. - 167 с.
[7] Шалашилин В.И., Данилин А.Н., Цветков Ю.Л., Рыжов СВ. Модель провода воздушной линии электропередачи // Механика композиционных материалов и конструкций. 2005. Т. 11. №4. - С. 564-572.
[8] Papailiou К.О. On the bending stiffness of transmission line conductors // IEEE Transactions on Power Delivery. 1997. V. 12. No 4. P. 1576-1588.
[9] Shalashilin V.I., Danilin A.N., Volkov-Bogorodskiy D.B. Model of overhead line conductor with interaction of layers // Proc. 6th International Symposium on Cable Dynamics. Charleston (U.S.A.). 19-22 Sept. 2005. P. 371-377.
[10] Dubois H., Lilien J.-L., Dal Maso F.A new theory for frequencies computation of overhead lines with bundle conductors // Rev. AIM. Liege. 1991. No 1. P. 46-62.
[11] Sauter D., Hagedorn P. On the hysteresis of wire cables in stockbridge dampers // Int. J. of Non-linear Mechanics. 2002. V. 37. No 8. P. 1453-1459.
[12] Описание изобретения к патенту РФ №1603229, кл. G01N 3/32 «Установка для испытаний образцов материалов на изгиб». Заявлено 16.11.1988 г. Опубликовано 30.10.1990 г.
[13] Описание изобретения к патенту РФ №1778617, кл. G01N 3/32, «Установка для испытаний образца материала на изгиб». Заявлено 21.09.1990 г. Опубликовано 30.11.1992 г.
[14] Описание изобретения к патенту РФ №2528120, кл. G01N 3/20, G01N 3/32 «Установка для испытания образцов материалов на изгиб». Заявлено 12.03.2013 г. Опубликовано 10.09.2014 г., бюл. №25.
[15] Standard Test Methods for Performance Characteristics of Metallic Bonded Resistance Strain Gages: ASTM E251-92 (2009).
[16] Aerospace Industries Association/National Aerospace Standards: Industry Standards & Regulations: AIA/NAS 942 (1994).
[17] Описание изобретения к патенту РФ №2526787, кл. G01N 3/20 «Способ получения чистого изгиба балки постоянного сечения и устройство для его осуществления». Заявлено 14.12.2012 г. Опубликовано 27.08.2014 г., бюл. №24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2614975C1 |
| Устройство для крепления и ориентации детекторов | 2020 |
|
RU2753749C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| Стенд для усталостных испытаний | 1985 |
|
SU1317317A1 |
| МОДУЛЬНЫЙ МИННЫЙ ТРАЛ | 2011 |
|
RU2478182C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЖЕЛЕЗОБЕТОННЫХ ЭЛЕМЕНТОВ НА СОВМЕСТНОЕ КРАТКОВРЕМЕННОЕ ДИНАМИЧЕСКОЕ ВОЗДЕЙСТВИЕ ИЗГИБАЮЩЕГО И КРУТЯЩЕГО МОМЕНТОВ | 2014 |
|
RU2570231C1 |
| РАЗВЕРТЫВАЮЩИЙСЯ КАРКАС РЕФЛЕКТОРА | 2011 |
|
RU2480386C2 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
Установка предназначена для изучения жесткостных и демпфирующих свойств гибких стержневых элементов со сложной внутренней структурой. С ее помощью определяются зависимости кривизны изгиба гибких стержневых элементов от величин краевых изгибающих моментов, а также устанавливаются зависимости углов закручивания торцевых сечений гибких элементов относительно друг друга от величин краевых крутящих моментов. Установка состоит из жесткого силового каркаса, содержащего опоры (1), шарнирных узлов (4), к которым прикреплены металлические штанги (6), электроприводов (7) и других элементов, обеспечивающих исследование недлинных гибких элементов как в виде сплошных однородных, неоднородных, композитных стержней, так и проволочных конструкций в виде проводов и тросов воздушных линий электропередачи. Полученные зависимости позволяют установить изгибные и крутильные жесткости гибких элементов, а также характеристики диссипации энергии деформирования в их структуре. Изобретение обеспечивает определение характеристик элементов для решения задач энергетики, авиационной и ракетно-космической техники, оптоволоконной техники, строительства и др. 9 з.п. ф-лы, 5 ил.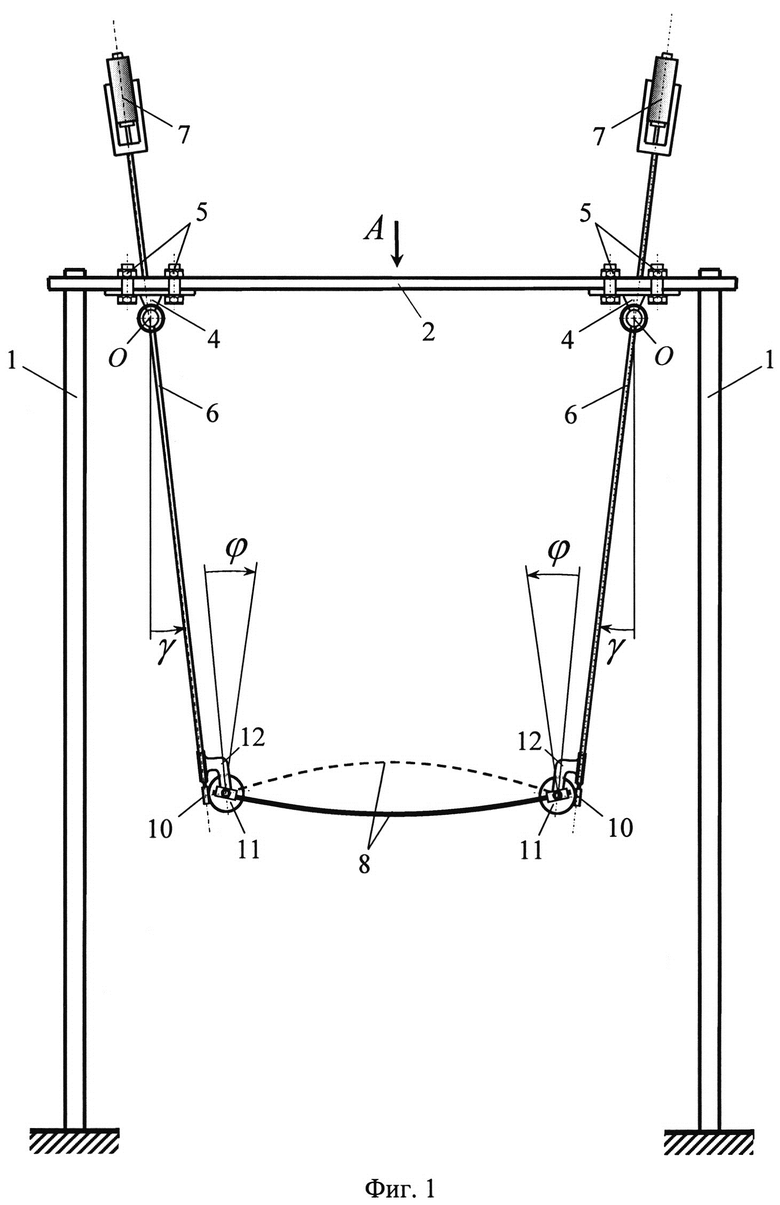
1. Установка для определения механических свойств гибких стержневых элементов состоит из жесткого силового каркаса, выполненного в виде, по меньшей мере, двух вертикальных опор, скрепленных внизу с основанием, или полом, или опорной рамой, и горизонтальной балки, жестко соединенной с опорами, при этом в горизонтальной балке выполнены, по крайней мере, два сквозных паза, предназначенных для перемещения и закрепления двух шарнирных узлов, расположенных на некоторых расстояниях от торцов балки; к шарнирным узлам прикреплены две металлические штанги виде трубок, имеющие возможность свободно вращаться в плоскости силового каркаса; на внешних концах штанг, выходящих сверху за пределы каркаса, закреплены электроприводы, создающие на своем валу момент, необходимый для обеспечения изгиба или кручения исследуемого гибкого стержневого элемента; с валом каждого электропривода скреплен длинный стержень, проходящий внутри штанги и передающий исследуемому гибкому стержневому элементу момент от электропривода, который усиливается посредством, по меньшей мере, одноступенчатого червячного редуктора, состоящего из червяка, червячного колеса, жестко скрепленного с концом исследуемого гибкого стержневого элемента и установленного в корпусе редуктора на подшипниках; в каждом шарнирном узле установлен датчик угла поворота штанги относительно ее начального вертикального положения; в механизме каждого червячного редуктора установлены датчик угла поворота червячного колеса относительно его начального положения, когда краевого момента нет или он близок к нулю и ось исследуемого гибкого элемента максимально спрямлена, и датчик момента, возникающего в результате сопротивления изгибу или кручению исследуемого гибкого стержневого элемента.
2. Установка по п. 1, в которой жесткое соединение горизонтальной балки с опорами выполнено посредством болтов или сварки.
3. Установка по п. 1, в которой шарнирные узлы закреплены в сквозных пазах горизонтальной балки посредством болтовых соединений.
4. Установка по п. 1, в которой на внешних выходящих за пределы горизонтальной балки концах штанг закреплены электроприводы.
5. Установка по п. 1, в которой исследуемый гибкий элемент своими концами жестко скреплен с червячными колесами посредством болтовых или винтовых креплений.
6. Установка по п. 1, в которой на каждой штанге расстояние между местом крепления электропривода и шарнирным узлом подбирается из условия равенства нулю моментов весов всех элементов конструкции штанги относительно оси шарнирного узла, но без учета веса исследуемого гибкого стержневого элемента.
7. Установка по п. 1, в которой измеряют моменты М, изгибающие гибкий стержневой элемент, углы γ отклонения осей штанг от вертикали и углы ϕ поворота краевых значений гибкого стержневого элемента от их начального положения.
8. Установка по п. 1, в которой схема нагружения гибкого стержневого элемента и его закрепление реализует напряженно-деформированное состояние, близкое к чистому изгибу, при этом кривизна гибкого стержневого элемента вычисляется по следующей формуле: k=1/R=2(ϕ-γ)/l, где R - радиус кривизны, l - длина гибкого стержневого элемента или расстояние между узлами крепления гибкого стержневого элемента к червячным колесам.
9. Установка по п. 1, в которой при исследовании изгиба гибкого стержневого элемента строятся зависимости кривизны k от величины краевого изгибающего момента М.
10. Установка по п. 1, в которой при исследовании кручения гибкого стержневого элемента строятся зависимости относительного угла закручивания краевых сечений относительно друг друга θ=Δϕкр/l, где Δϕкр - угол поворота одного сечения относительно другого, от величины скручивающего момента Мкр.
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ИЗГИБА БАЛКИ ПОСТОЯННОГО СЕЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526787C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ МАТЕРИАЛОВ НА ИЗГИБ | 2013 |
|
RU2528120C1 |
| Установка для испытаний образца материала на изгиб | 1990 |
|
SU1778617A1 |
| JP 2011257355 A, 22.12.2011. | |||

