Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения гидролокационных сигналов в современных гидроакустических комплексах.
Зондирующие сигналы, излучаемые гидролокаторами, размещенными на различных носителях, в том числе и подвижных, могут быть обнаружены на больших дистанциях с использованием известных систем обнаружения гидролокационных сигналов (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» СПб Наука 2004 г. стр. 89-92). При обнаружении этих сигналов возникает задача измерения параметров зондирующего сигнала.
Известны методы обнаружения местоположения источника зондирующих сигналов, изложенные в работе А.А. Простаков «Гидроакустические средства флота» М. 1974 г. стр. 90. В работе рассматривается задача определения места случайной цели, излучающей импульсные сигналы при использовании нескольких приемных постов.
Известен способ измерения изменения курсового угла движения источника зондирующих сигналов по патенту РФ №2515419, опубл.19.05.2014 г., содержащий последовательный прием зондирующих сигналов, в котором производят спектральный анализ первого, второго и n-ого сигналов, в каждом из этих принятых сигналов определяют порог обнаружения, измеряют амплитуду спектральных отсчетов, превысивших порог, определяют и запоминают амплитуды спектральных отсчетов, имеющих максимальную амплитуду, а изменение курсового угла движения источника определяют через соотношения разности измеренных последовательных частот.
Недостатком этого способа является то, что он использует обработку длительных зондирующих сигналов, что имеет ограниченное место в практике работы гидроакустических средств. В большинстве случаев используются гидролокаторы, которые излучают зондирующие сигналы короткой длительности, у которых спектр широкий, что не позволит выделить спектральные отсчеты для измерения их разности.
Известен способ измерения изменения курсового угла движения обнаруженного источника зондирующих сигналов по патенту РФ №2545068, опубл. 27.03.2015 г. по процедуре наиболее близкий к предлагаемому способу. В этом способе последовательно принимают зондирующие сигналы перемещающегося источника, определяют момент времени прихода первого принятого зондирующего сигнала, последовательно измеряют моменты времени ti приема еще n зондирующих сигналов, где n не менее 3-х, определяют временной интервал Tk между моментами прихода каждых двух следующих друг за другом зондирующих сигналов Tk=ti+1- ti, определяют разность измеренных временных интервалов ΔTm=Tk+1 - Tk, где m номер измерения разности последовательных временных интервалов, a Tk+1=ti+2 - ti+1, определяют знак разности временных интервалов (ΔTm+1 - ΔTm). По этой разности определяют источник приближается или удаляется, а по отношению каждой последующей разности к каждой предыдущей разности временных интервалов определяют величину изменения курсового угла движения источника зондирующих сигналов.
Недостатком является то, что возникают ошибки измерения временного положения зондирующего сигнала за счет наличия многолучевости при распространении, в результате чего формируются сигналы, подобные зондирующему сигналу в непосредственной временной близости от основного сигнала, и сигналы, переизлучаемые источниками биологического происхождения. Временное положение таких сигналов случайно, что искажает достоверность обработки параметров истинного источника зондирующих сигналов. (Тимошенков В.Г. «Статистическая оценка структуры шумоподобного гидроакустического сигнала в условиях положительной рефракции и волнения моря» НТС Гидроакустика вып. 35 СПб 2018 г. АО «Концерн Океанприбор», «Акустика океана» под ред. Бреховских Л.М. Наука М. 1974 г. стр. 128).
Кроме того, рассмотренные соотношения справедливы, если приемник зондирующих сигналов неподвижен, а если он перемещается, то возникает ошибка, связанная со скоростью перемещения и с направлением движения приемника относительно положения источника зондирующих сигналов.
Задача изобретения заключается в повышении достоверности и надежности обнаружения зондирующего сигнала.
Техническим результатом использования предлагаемого изобретения является исключение ложных сигналов и влияния движения приемника зондирующих сигналов, которые искажают результаты измерений, что повысит достоверность оценки нужных параметров.
Технический результат достигается тем, что в способ, содержащий последовательный прием зондирующих сигналов перемещающегося источника, в котором последовательно измеряют моменты времени ti приема n зондирующих сигналов по их переднему фронту, где n не менее 3-х, определяют временной интервал Tk между моментами приема каждых двух следующих друг за другом зондирующих сигналов Tk=ti+1 - ti, определяют разность измеренных временных интервалов Tk+1 - Tk, где Tk+1=ti+2 - ti+1, ti+1 и ti+2 - время приема сигналов, следующих друг за другом и за сигналом, пришедшим во время ti, введены новые признаки, а именно: измеряют амплитуды каждого принятого сигнала, измеряют длительность  каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности
каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности  и ее среднеквадратическое отклонение
и ее среднеквадратическое отклонение  по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах
по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах  из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti+ti+2)/2=ti+1±(Tk - Tk+1), и считают их принятыми зондирующими сигналами.
из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti+ti+2)/2=ti+1±(Tk - Tk+1), и считают их принятыми зондирующими сигналами.
Поясним достижение технического результата.
Как правило, работа источника зондирующего сигнала (ЗС), являющегося гидролокатором, имеет свой целью обзор пространства и обнаружение какого-либо объекта по наличию от него эхосигнала. Дальность распространения зондирующего сигнала существенно больше, чем дальность обнаружения эхосигнала от обнаруживаемого этим сигналом объекта. Поэтому зондирующий сигнал обнаруживается приемным устройством системы обнаружения гидролокационных сигналов (ОГС) практически всегда при первых же сигналах излучения. Амплитуда принятого зондирующего сигнала прямого распространения большая и всегда существенно превосходит помеху. Известно, что наличие многолучевости приводит к тому, что при распространении число сигналов на приемном устройстве увеличивается, что искажает достоверность измерительного процесса. При этом на вход приемного устройства поступает несколько сигналов со случайными амплитудами, которые превышают помеху, случайными временами прихода и случайными длительностями.
Для источника зондирующих сигналов (гидролокатора) длительности зондирующих сигналов являются фиксированными, поэтому при распространении с примерно одинаковой дистанции длительности зондирующих сигналов не будут существенно изменяться при измерении на фиксированном уровне от амплитуды. Наличие многолучевости является случайным событием, в результате чего распространение сигнала происходят по случайным траекториям, которые определяются взаимным положением излучателя и приемника, а так же наличием отражения от поверхности и от дна. При этом сигналы, которые распространяются по основному лучу, имеют неизменные параметры по длительности и по амплитуде, а сигналы, распространяющиеся по другим лучам, имеют случайное время прохождения от источника до приемника и значительную флюктуацию амплитуд и длительностей. Таким образом, для достоверного обнаружения зондирующего сигнала необходимо, прежде всего, измерить амплитуду и длительность принятого сигнала. Для сигнала прямого распространения по основному лучу длительности последовательно принятых сигналов будут равны, если их измерять на одинаковом уровне от максимальной амплитуды. Поскольку амплитуды флюктуируют, то и измеренные длительности будут отличаться друг от друга. Известно, что разности времен приема каждых двух следующих друг за другом зондирующих сигналов также будут незначительно отличаться друг от друга. Время приема сигнала ti=t0+Д0/С, где С - скорость звука. Время момента излучения t0 нам неизвестно и дистанция между гидролокатором и приемником Д0 также неизвестна. При скорости движения гидролокатора V время приема второго сигнала: ti+1=t0+Т+(Д0 - VT)/C, где Τ время между излучениями зондирующих сигналов. Тогда разница Tk между временем приема сигнала ti и сигнала ti+1: Tk = Τ (1-V/C). Время приема сигнала ti+2, следующего за сигналом ti+1: ti+2=t0+2Т+(Д0 - 2VT)/C, а разница между временем приема этих сигналов Tk+1=Τ (1-V/C). При этом следует учесть, что все величины Т, С, V за время излучения практически не изменяются. Поэтому всегда для последовательности реальных зондирующих сигналов будет соблюдаться условие (ti+ti+2)/2=ti+1. Однако, здесь следует учесть неравномерность собственного движения приемника зондирующих сигналов, неравномерность движения гидролокатора, который излучает зондирующие сигналы, и флюктуации амплитуд при распространении зондирующих сигналов. В этой ситуации время приема зондирующих сигналов будет случайным образом флюктуировать. Величина флюктуаций неизвестна, но ориентировочно она будет определяться разницей между значениями  поэтому зондирующим сигналом следует считать тот, который удовлетворяет условию (ti+ti+2)/2=ti+1±(Tk - Tk+1).
поэтому зондирующим сигналом следует считать тот, который удовлетворяет условию (ti+ti+2)/2=ti+1±(Tk - Tk+1).
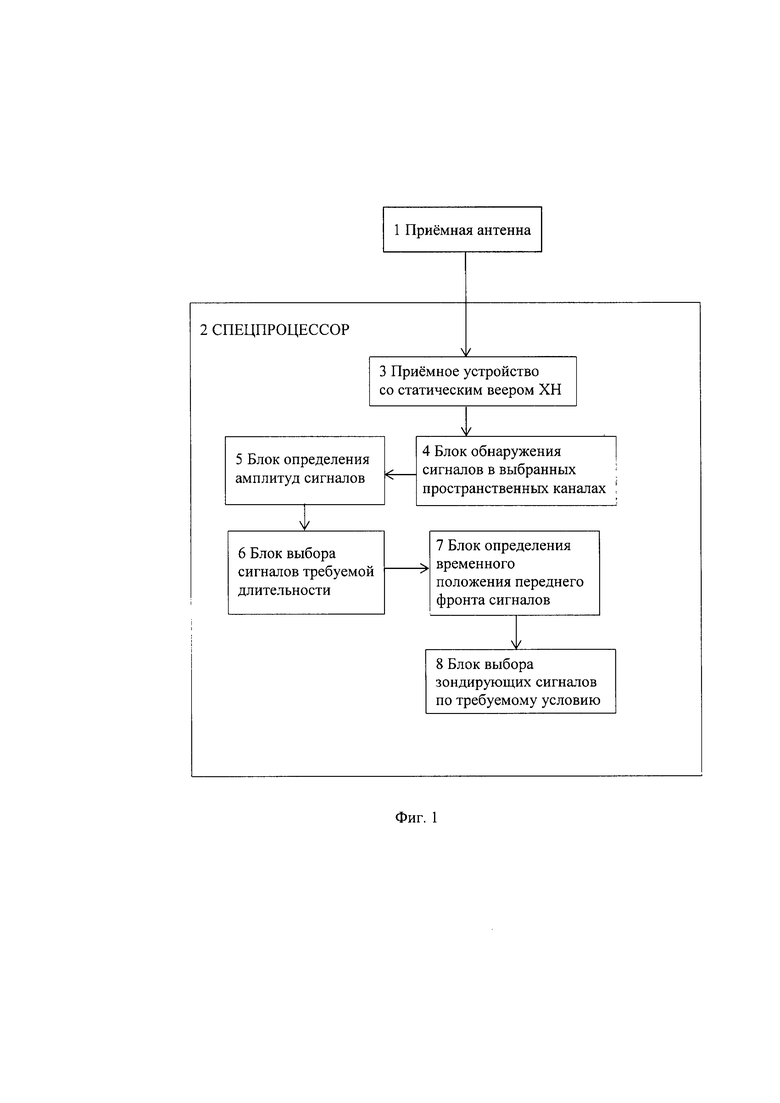
Сущность изобретения поясняется фиг. 1, на которой представлена схема реализации предложенного способа.
Устройство (фиг.1) содержит приемную антенну 1, соединенную со спецпроцессором 2, в состав которого входят последовательно соединенные приемное устройство 3, формирующее статический веер характеристик направленности, блок 4 обнаружения сигналов в выбранных пространственных каналах, блок 5 определения амплитуд сигналов, блок 6 выбора сигналов требуемой длительности, блок 7 определения временного положения переднего фронта сигналов, блок 8 выбора зондирующих сигналов по требуемому условию.
Реализацию предлагаемого способа целесообразно рассмотреть совместно с описанием работы устройства (фиг. 1).
Зондирующие сигналы движущегося источника (гидролокатора) принимаются антенной 1 системы ОГС и поступают на вход приемного устройства 3, где усиливаются, подвергаются фильтрации и преобразуются в цифровой вид, удобный для дальнейшей обработки и измерения с необходимой точностью. Антенна 1, приемное устройство 3 являются известными устройствами, реализованными в системах обнаружения гидролокационных сигналов ОГС. Сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов (см. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» СПб Наука 2004 г. стр. 164-176, стр. 278-295). Все системы обнаружения гидролокационных сигналов разработаны с использованием статического веера характеристик направленности, который обеспечивают круговой обзор пространства, поскольку направление прихода зондирующего сигнала априорно неизвестно.
Сигналы, принятые всеми характеристиками направленности, поступают в блок 4 обнаружения сигналов, где производится стандартная процедура обнаружения по превышению порога: сигналы, превысившие порог поступают в блок 5, где измеряется их амплитуда, которая передается в блок 6 выбора сигналов требуемой длительности. Определение длительностей сигналов производится на уровне 0,7 от их амплитуды. Зондирующие сигналы реальных гидролокаторов имеют фиксированную длительность, которая при распространении по основному лучу не изменяется. Если сигнал распространяется по нескольким лучам, то происходит сложение нескольких сигналов и их длительность увеличивается. Сигналы, длительность которых лежит в пределах  поступают в блок 7 определения временного положения их переднего фронта. Определение временного положения по максимуму амплитуды сигнала вводит дополнительную ошибку, поскольку амплитуда на самой длительности может флюктуировать и изменяться случайно, что скажется на погрешности определения временного положения. Измеренные временные положения принятых сигналов, имеющих требуемую длительность, поступают в блок 8 выбора зондирующих сигналов по условию (ti+ti+2)/2=ti+1±(Tk - Tk+1). Соблюдение этого условия обеспечивает отсев сигналов, которые могут формироваться случайно. Их временное положение будет случайным и не связано с предыдущим и последующим излучением, что характерно для гидролокатора.
поступают в блок 7 определения временного положения их переднего фронта. Определение временного положения по максимуму амплитуды сигнала вводит дополнительную ошибку, поскольку амплитуда на самой длительности может флюктуировать и изменяться случайно, что скажется на погрешности определения временного положения. Измеренные временные положения принятых сигналов, имеющих требуемую длительность, поступают в блок 8 выбора зондирующих сигналов по условию (ti+ti+2)/2=ti+1±(Tk - Tk+1). Соблюдение этого условия обеспечивает отсев сигналов, которые могут формироваться случайно. Их временное положение будет случайным и не связано с предыдущим и последующим излучением, что характерно для гидролокатора.
Таким образом, обеспечивается повышение достоверности и надежности обнаружения зондирующих сигналов в условиях многолучевого распространения и наличия несанкционированных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров маневрирования источника зондирующих сигналов | 2022 |
|
RU2793779C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ КУРСОВОГО УГЛА ДВИЖЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2013 |
|
RU2545068C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕЩЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2012 |
|
RU2496117C1 |
| Способ определения траектории маневрирования носителя источника зондирующих сигналов для его классификации | 2023 |
|
RU2815275C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ КУРСОВОГО УГЛА ДВИЖЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2012 |
|
RU2515419C1 |
| Способ классификации целей, адаптированный к гидроакустическим условиям | 2016 |
|
RU2624826C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА | 2015 |
|
RU2581416C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения гидролокационных сигналов в современных гидроакустических комплексах. Технический результат: повышение достоверности оценки нужных параметров за счет исключения ложных сигналов и влияния движения приемника зондирующих сигналов, которые искажают результаты измерений. Сущность: в способе, содержащем последовательный прием зондирующих сигналов перемещающегося источника, в котором последовательно измеряют моменты времени ti приема n зондирующих сигналов по их переднему фронту, где n не менее 3-х, определяют временной интервал Тk и между моментами приема каждых двух следующих друг за другом сигналов Tk = ti+1 - ti определяют разность измеренных временных интервалов Tk+1 - Tk, где Tk+1 = ti+2 – ti+1, ti+1 и ti+2 - время приема сигналов, следующих друг за другом и за сигналом, пришедшим во время ti, измеряют амплитуды каждого принятого сигнала, измеряют длительность  каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности
каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности  и ее среднеквадратическое отклонение
и ее среднеквадратическое отклонение  по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах
по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах  из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti + ti+2)/2 = ti+1 ± (Tk – Tk+1), и считают их принятыми зондирующими сигналами. 1 ил.
из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti + ti+2)/2 = ti+1 ± (Tk – Tk+1), и считают их принятыми зондирующими сигналами. 1 ил.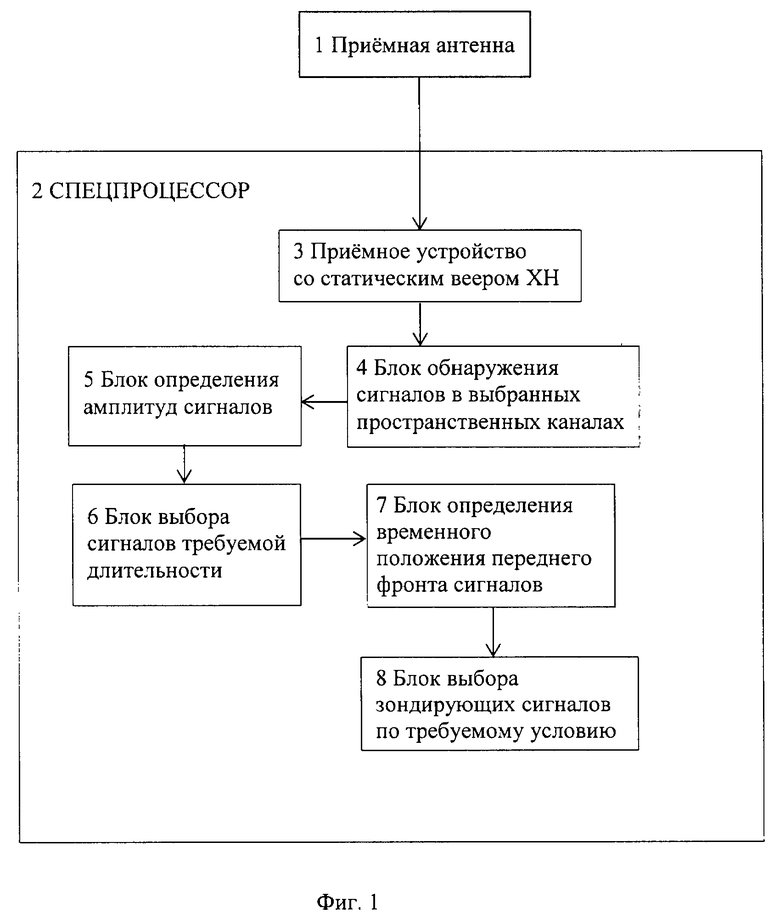
Способ обнаружения зондирующих сигналов, содержащий последовательный прием зондирующих сигналов перемещающегося источника, в котором последовательно измеряют моменты времени ti приема n зондирующих сигналов по их переднему фронту, где n не менее 3-х, определяют временной интервал Tk между моментами приема каждых двух следующих друг за другом зондирующих сигналов Tk=ti+1-ti, определяют разность измеренных временных интервалов Tk+1 - Tk, где Tk+1 =ti+2 - ti+1, ti+1 и ti+2 - время приема сигналов, следующих друг за другом и за сигналом, принятым во время ti, отличающийся тем, что измеряют амплитуды каждого принятого сигнала, измеряют длительность  каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности
каждого принятого сигнала на уровне 0,7 от его амплитуды, определяют среднее значение длительности  и ее среднеквадратическое отклонение
и ее среднеквадратическое отклонение  по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах
по 3-м последовательным сигналам, и если длительность каждого последующего сигнала лежит в пределах  из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti+ti+2)/2=ti+1±(Tk - Tk+1), и считают их принятыми зондирующими сигналами.
из всех обнаруженных сигналов выбирают только те сигналы, которые удовлетворяют условию (ti+ti+2)/2=ti+1±(Tk - Tk+1), и считают их принятыми зондирующими сигналами.
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Устройство для высадки головок на стержнях | 1958 |
|
SU125726A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| CN 106772324 B, 03.09.2019. | |||

