Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для ограждения места работ и автоматизированного оповещения работающих на железнодорожных путях о приближении железнодорожного подвижного состава при капитальном ремонте с использованием робота-сигналиста.
Известен мобильный робототехнический комплекс, содержащий подвижную платформу с электроприводом и установленные на ней устройство фотовидеофиксации и устройство управления, устройство беспроводной зарядки аккумуляторных батарей, закреплённое на упомянутой платформе и подключённым к источнику питания в виде аккумуляторной батареи (RU160103 U1, B25J5/00, 10.03.2016).
Известный робототехнический комплекс выполнен с возможностью дистанционного управления передвижением с возможностью видеомониторинга окружающего пространства.
Однако использование его для ограждения участка железнодорожного пути при проведении ремонтных работ не представляется возможным. Кроме того, комплект не позволяет определения скорости и длины объекта наблюдения.
Известна система оповещения работающих о приближении железнодорожного подвижного состава при выполнении работ по ремонту инфраструктуры железнодорожного транспорта (СОРЖ), содержащая датчики обнаружения железнодорожного подвижного состава, системные блоки с радиопередатчиками, центральный блок управления с радиостанцией, коллективные переносимые оповещатели с радиостанциями, коллективные мобильные оповещатели с радиостанциями, ретранслятор, индивидуальные носимые оповещатели с радиоприемниками, датчики обнаружения подвижного состава представляет собой переносимое устройство, устанавливаемое на подошву рельса с его наружной стороны на железнодорожном пути, по которому осуществляется движение поездов, и включающее ультразвуковой передатчик и приемник, формирователь сигналов контроля и оповещения и устройство контроля правильности установки (RU2606755С1, B61L23/06, 10.01.2017).
В известном решении контроль функционирования датчиков обнаружения подвижного состава и системных блоков в автоматическом режиме осуществляет центральный блок управления под контролем сигналиста, находящегося на месте проведения работ, который в случае нарушения их функционирования сообщает об этом сигналисту ограждения и при получении соответствующего сообщения от него ручным способом включает сигнал оповещения и передает его по радиоканалу на коллективные и индивидуальные оповещатели.
Недостатком известной системы является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава для его реализации требуются тем не менее сигналисты, обеспечивающие ограждение границ участка работ. Необходимость ограждения границ участка работ вызвана тем, что при возникновении на месте работ препятствий для движения подвижного состава руководитель работ должен сообщить об этом по радио сигналисту, находящемуся на расстоянии тормозного пути от границ участка работ, который с помощью развернутого красного флага сообщает машинисту подвижного состава на необходимость остановки у границ участка работ.
Известна система ограждения места проведения работ и оповещения работающих на железнодорожных путях, содержащая установленные на подошве рельса железнодорожного пути на заданном расстоянии по обе стороны от границ места проведения работ датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств, размещенные на заданном расстоянии по обе стороны от границ места проведения работ, и установленные на месте проведения работ коллективный переносной оповещатель работающих, коллективные переносные оповещатели, установленные на путевых машинах, индивидуальные носимые оповещатели, приданные работающим, и коллективный переносной сигнализатор, при этом коллективный переносной сигнализатор выполнен с возможностью взаимодействия по радиоканалу с радиостанцией каждого датчика обнаружения подвижного состава, с сигнальными радиоуправляемыми устройствами, с коллективным переносным оповещателем, с коллективными переносными оповещателями, установленными на путевых машинах, и с индивидуальными носимыми оповещателями (RU2655566C1, B61L23/06, 28.05.2018).
Однако оповещение выполняется одновременно для всех путевых машин, находящихся на участке работ независимо от их местоположения относительно поезда, что при сравнительно низкой скорости движения поезда в зоне проведения капитального ремонта пути приводит к неоправданным задержкам в выполнении ремонтных работ.
Техническим результатом изобретения является повышение безопасности работающих при проведении капитального ремонта пути и безопасности движения поездов за счет использования робота-сигналиста, обеспечивающего исключение влияния человеческого фактора при организации ограждения места проведения работ, и оповещения на путевых машинах в зонах их работы в зависимости от расстояния приближения поезда к их местоположению, а также оповещения работающих о недопустимом сближении путевых машин.
Технический результат достигается тем, что робот-сигналист выполнен в виде тележки с электроприводом и выполненной возможностью установки на рельсовые пути, на которой размещены последовательно соединенные радиомодем, блок задания координат и блок управления электроприводом тележки, блок формирования сообщений, первый вход которого через блок обработки подключен к видеокамере, второй вход – к радиолокационному датчику, а выходы соответственно соединены с входом радиомодема и светового сигнализатора непосредственно и через речевой информатор с входом радиомодема поездной радиосвязи, и навигационный приемник выходом, подключенный ко второму входу блока задания координат и третьему входу блока формирования сообщений и автономный источник питания.
Технический результат достигается тем, что система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути содержит блок управления оповещением и ограждением места проведения работ, установленный на месте проведения работ, оповещатель, размещенный на каждой путевой машине, участвующей в проведении капитального ремонта пути, и роботы-сигналисты, размещенные на ремонтируемом пути по обе стороны от места проведения работ на заданном расстоянии, при этом блок управления оповещением и ограждением места проведения работ включает блок управления, первый выход которого подключен через формирователь сообщений к блоку сопряжения, вход и выход которого соединен с выходом и входом радиомодема, формирователь сигналов оповещения, вход которого соединен со вторым выходом блока управления, другой вход - через блок формирования времени соединен с выходом навигационного приемника, а выход – со вторым входом формирователя сообщений, блок приема данных о поезде, входом подключенный ко второму выходу блока сопряжения, выходами – к входам блока видеоконтроля и блока управления, другой вход которого соединен с выходом регистратора данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя сигналов оповещения, а входом – к третьему выходу блока сопряжения и . автономный источник питания, каждый оповещатель включает контроллер, входы которого подключены к выходам радиомодема и блока номера установки путевой машины, а выходы соответственно - к входам блока оповещения, формирователя сообщений непосредственно и через блок сравнения к управляющему входу блока управления путевой машины, и навигационный приемник, выход которого соединен с другими входами блока сравнения и формирователя сообщений, выходом подключенного к входу радиомодема, причем входы питания элементов оповещателя подключены к сети питания путевой машины.
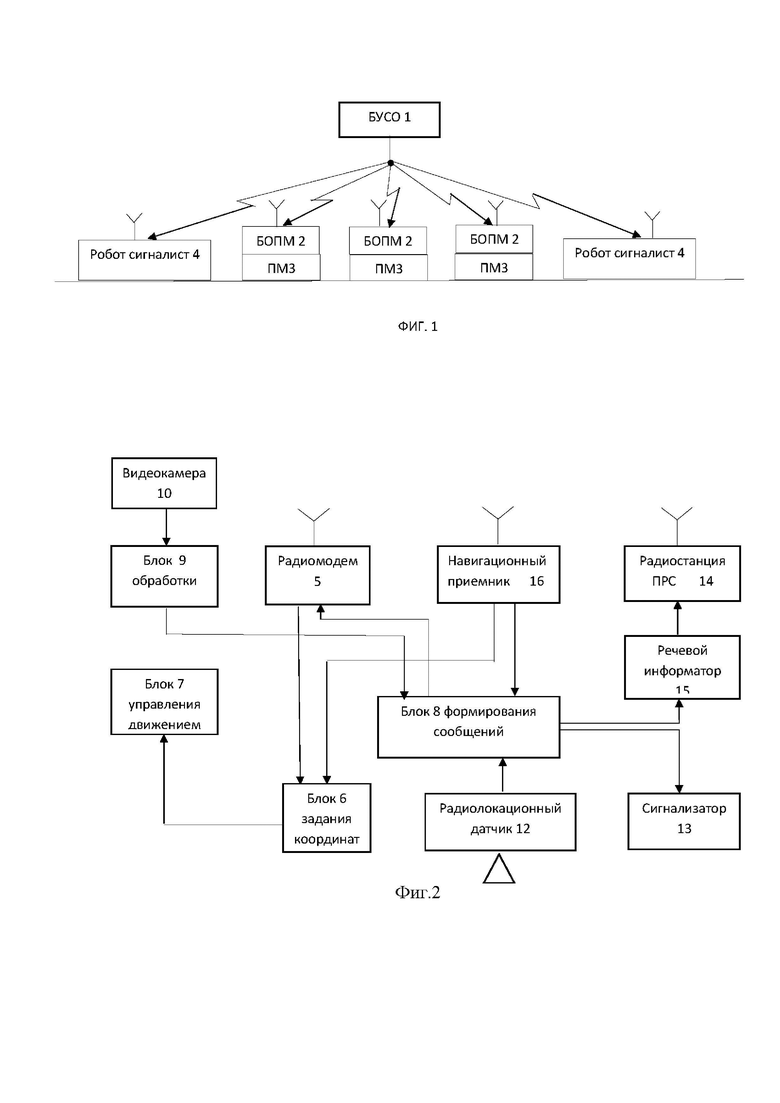
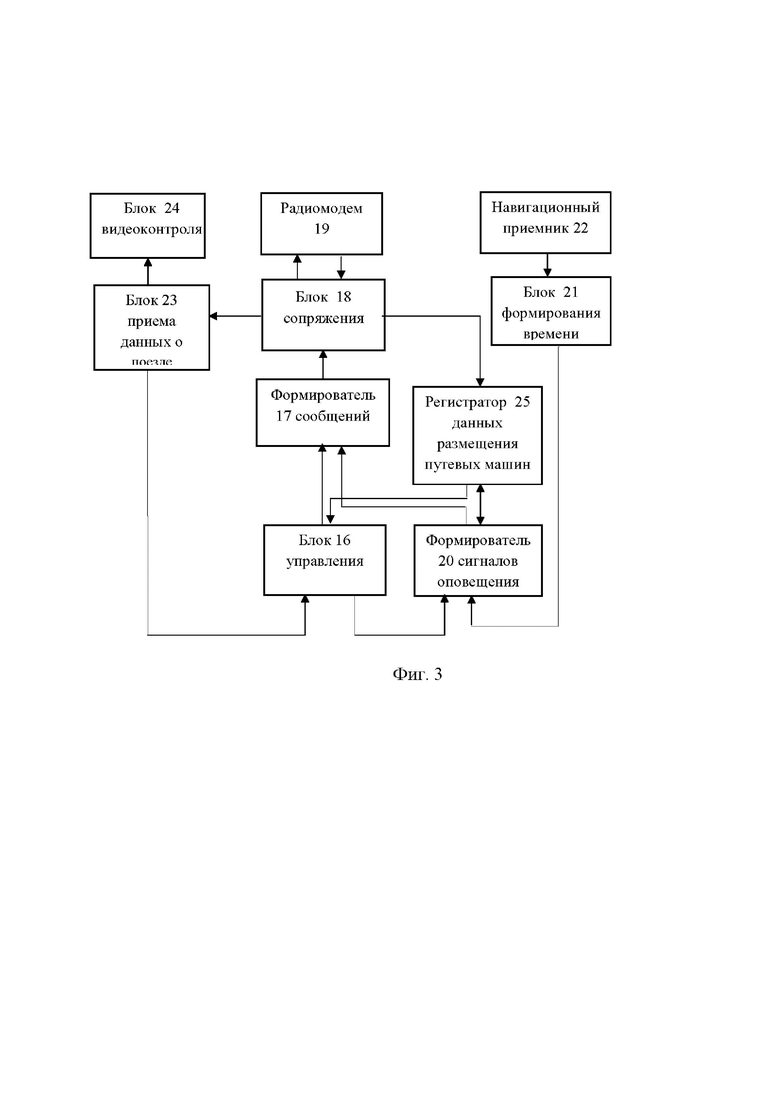
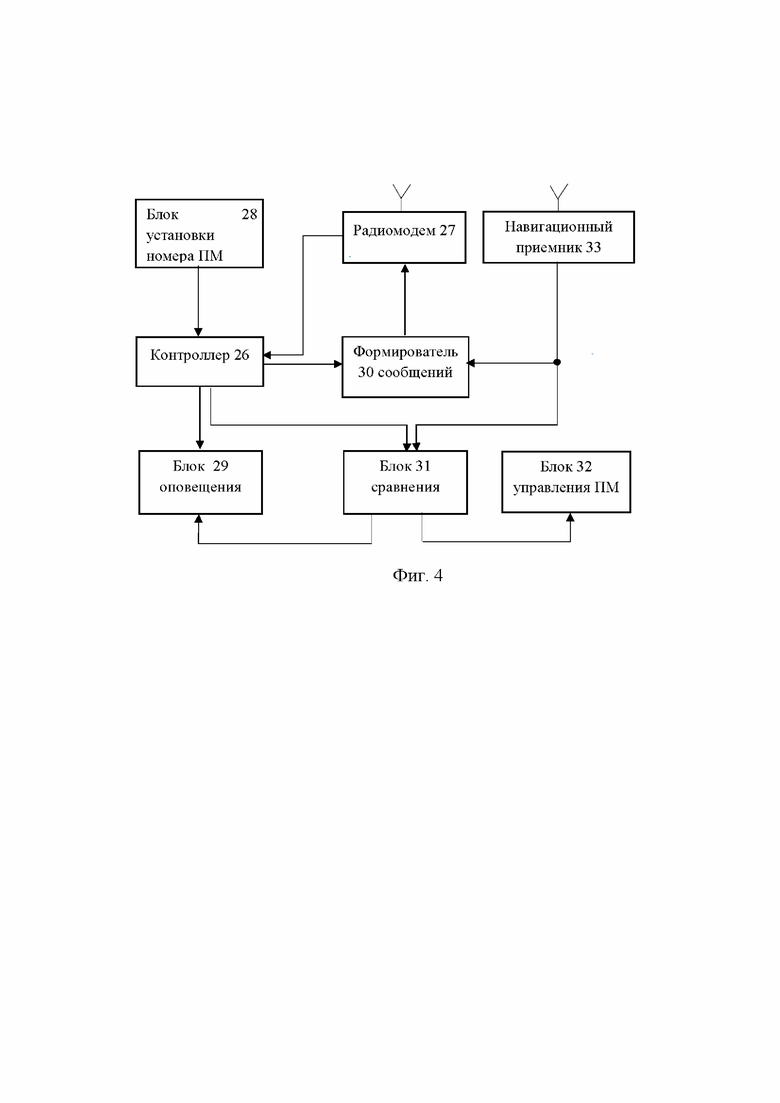
Сущность изобретения поясняется чертежами на фиг. 1- 4. На фиг. 1 представлена структурная схема системы ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути, на фиг. 2 – структурная схема робота-сигналиста, на фиг. 3 – структурная схема блока управления оповещением и ограждением места проведения работ, на фиг.4 – блок оповещения путевых машин.
Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути содержит блок 1 управления ограждением места проведения работ и оповещением работающих (БУСО 1), блоки 2 оповещения (БОПМ 2), расположенные на путевых машинах 3, и роботы-сигналисты 4. При этом БОПМ 2 и роботы-сигналисты 4 выполнены с возможностью взаимодействия по радиоканалу с БУСО 1.
Робот-сигналист 4 выполнен в виде тележки с электроприводом и выполненной с возможностью установки на рельсовые пути, на которой размещены последовательно соединенные радиомодем 5, блок 6 задания координат и блок 7 управления электроприводом тележки, блок 8 формирования сообщений, первый вход которого через блок 9 обработки подключен к видеокамере 10, второй вход – к радиолокационному датчику 11, а выходы соответственно соединены с входом радиомодема 5 и светового сигнализатора 12 непосредственно и через речевой информатор 13 с входом радиомодема 14 поездной радиосвязи, и навигационный приемник 15 выходом, подключенный ко второму входу блока 6 задания координат и третьему входу блока 8 формирования сообщений, а также автономный источник питания (на чертеже не показан).
БУСО 1 содержит блок 16 управления, первый выход которого подключен через формирователь 17 сообщений к блоку 18 сопряжения, вход и выход которого соединен с выходом и входом радиомодема 19, формирователь 20 сигналов оповещения, вход которого соединен со вторым выходом блока 16 управления, другой вход - через блок 21 формирования времени соединен с выходом навигационного приемника 22, а выход – со вторым входом формирователя 18 сообщений, блок 23 приема данных о поезде, входом подключенный ко второму выходу блока 18 сопряжения, выходами – к входам блока 24 видеоконтроля и блока 16 управления, другой вход которого соединен с выходом регистратора 25 данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя 20 сигналов оповещения, а входом – к третьему выходу блока 18 сопряжения. Питание элементов БУСО 1 осуществляют от автономного источника питания (на чертеже не показан).
Функциональные элементы БУСО 1 установлены в едином корпусе с панелью блока 25 видеоконтроля и элементами управления блока 17 управления, размещенными на его внешней стороне (на чертеже не показаны).
БОПМ 2 включает контроллер 26, входы которого подключены к выходам радиомодема 27 и блока 28 номера установки путевой машины 3, а выходы соответственно - к входам блока 29 оповещения, формирователя 30 сообщений непосредственно и через блок 31 сравнения к управляющему входу блока 32 управления путевой машины, и навигационный приемник 33, выход которого соединен с другими входами блока 31 сравнения и формирователя 30 сообщений, выходом подключенного к входу радиомодема 27. Питание элементов БОПМ 2 осуществляют от сети питания ПМ3.
Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути функционирует следующим образом.
Руководитель работ по капитальному ремонту пути задает режимы функционирования системы посредством БУСО 1.
Перед началом работы выполняют режим формирования данных о номерах и последовательности расположения путевых машин 3 (ПМ 3) на участке капитального ремонта железнодорожного пути. С каждой сторон участка капитального ремонта пути на рельсы устанавливают робота-сигналиста 4.
На каждой ПМ 3 в БОПМ 2 с помощью блока 28 устанавливают соответствующий номер её установки на участке проведения работ, данные о котором блок 28 передает в контроллер 26. Кроме того, на каждой ПМ 3 навигационный приемник 33 определяет координаты её местоположения и в режиме реального времени передает их в формирователь 30 сообщений.
При этом блок 16 управления БУСО 1 формирует соответствующую команду формирователю 17 сообщений, который через блок 18 сопряжения, радиомодем 19 по радиоканалу и радиомодем 27 передает ее на вход контроллера 26 каждого БОПМ 2. Контроллер 26 каждого БОПМ 2 после получение команды от БУСО 1 направляет данные о номере установки ПМ3 формирователю 30 сообщений, который формирует сообщение, содержащее данные о номере установки ПМ3 на участке проведения работ и координатах ее местоположения, и передает его через радиомодем 27 по радиоканалу на вход радиомодема 19 БУСО 1.
Данные, полученные от каждой ПМ3, радиомодем 19 направляет через блок 18 сопряжения регистратору 25, который формирует реестр последовательности расположения ПМ3 на участке капитального ремонта пути с указанием координат их местонахождения.
На основе данных о координатах местонахождения первой и последней путевых машин на участке проведения ремонта, получаемой от регистратора 25, блок 16 управления вычисляет требуемое по условиям безопасности места ограждения проведения работ координаты местоположения роботов-сигналистов 4 и через формирователь сообщений 17, блок 18 сопряжения и радиомодем 19 по радиоканалу передает информацию о координатах установки на радиомодем 5 для каждого робота-сигналиста 4. Радиомодем 5 каждого робота-сигналиста 4 передает их в блок 6 задания координат.
Блок 6 задания координат сравнивает координаты местоположения робота-сигналиста 4, полученные от навигационного приемника 15, с координатами, заданными блоком 16 управления БУОП 1, и при разности координат формирует соответствующую команду на перемещение тележки в блок 7 управления движением тележки. При совпадении координат блок 6 формирует соответствующую команду для остановки тележки, устанавливая робота-сигнализатора 4 в требуемое положение.
При перемещениях ПМ3 эта операция периодически повторяется.
Кроме того, блок 16 управления осуществляет контроль за расположением ПМ3 на участке проведения работ. На основании данных регистратора 25 блок 16 управления вычисляет расстояние между ПМ3 и при недопустимом для безопасности сближении соседних ПМ 3 определяет координаты местоположения каждой ПМ3, отвечающие условиям безопасности.
Блок 16 управления информацию о координате каждой путевой машины последовательно через формирователь 17, блок 18 сопряжения, радиомодем 19 по радиоканалу передает в радиомодем 27 каждого БОПМ 2. Радиомодем 27 полученную информацию передает в контроллер 26, который направляет ее в блок 31, на другой вход которого в режиме реального времени поступает информация от навигационного приемника 33 о координате местонахождения ПМ3. Блок 31 сравнивает координаты местоположения ПМ3, полученные от навигационного приемника 33, с координатами, заданными блоком 16 управления БУОП 1, и при разности координат формирует соответствующую команду в блок 32 управления на перемещение ПМ3 и включении блока 29 оповещения. При совпадении координат блок 32 формирует соответствующую команду для остановки тележки, устанавливая ПМ3 в требуемое положение, и команду на отключение блока 29 оповещения.
При перемещениях ПМ3 эта операция повторяется.
Контроль прохождения поезда по соседнему с ремонтируемым путем осуществляют роботы-сигналисты 2 дистанционно с помощью радиолокационного датчика 11 и видеокамеры 10.
При входе поезда радиолокационный датчик 11 регистрирует данные о входе поезда, о его скорости и длине и передает их в блок 9 формирования сообщений. Видеокамера 11 регистрирует видеоизображение поезда. Блок 10 преобразовывает соответствующим образом видеоизображение и передает его в блок 8. В блок 8 формирования сообщений поступает также информация о координатах местоположения робота-сигналиста 4, соответствующих координатам входа поезда. На основе полученных данных блок 8 формирует сообщение, включающее данные о координатах входа поезда, его скорости и длине, а также данные видеоизображений поезда, которое через радиомодем 5 по радиоканалу передает в радиомодем 19 БУСО 1.
При этом блок 8 формирования сообщений через речевой информатор 13 и радиостанцию 14 по радиоканалу поездной связи информирует машиниста поезда о входе на участок приближения к месту проведения работ по капитальному ремонту. Одновременно сообщение блок 8 формирует команду на включение сигнализатора 12.
Радиомодем 19 данные о координатах входа поезда, его скорости и длине, а также данные видеоизображений поезда через блок 18 сопряжения передает в блок 23 данных о поезде. Данные о видеоизображении поезда блок 23 направляет в блок 24 видеоконтроля. Блок 24 видеоконтроля позволяет осуществлять видеонаблюдение руководителя работ за местом установки роботов-сигналистов 4. Данные о координатах входа поезда, его скорости и длине блок 23 направляет в блок 16 управления, который одновременно с данными о координатах поезда, его скорости и длине передает формирователю 20 команду на формирование сигналов оповещения. В формирователь 20 поступает информация о точном времени, сформированным блоком 21 на основе данных навигационного приемника 22.
Формирователь 20, получив команду на формирование сигналов оповещения, запрашивает данные о координатах размещении путевых машин на участке ремонта у регистратора 25. Формирователь 20 с учетом координат местоположения каждой ПМ3 и ее номера установки на участке капитального ремонта и данных о координатах поезда и его скорости и длине, в также данных точного времени определяет время входа поезда и вычисляет время задержки включения сигнала оповещения для каждой ПМ3 с учетом выполнения требования по времени безопасного оповещения. Данные о времени задержки включения сигнала оповещения для каждой П 3 с указанием ее номера установки формирователь 20 передает в формирователь 17. На основании полученных данных формирователь 17 передает последовательно сообщение о включении оповещения на каждую ПМ 3 с учетом вычисленной задержки через блок 18 сопряжения, радиомодем 19 по радиоканалу на радиомодем 27. Радиомодем 27 передает сообщение на включение сигнала оповещения на контроллер 27, который передает команду на блок 29 для включения сигнала оповещения работающих в зоне ПМ3. Такой режим обеспечивает минимизацию непроизводительных затрат времени рабочего персонала во время прохождения поезда по участку капитального ремонта пути.
Таким образом, предлагаемое изобретение позволяет исключить влияние человеческого фактора при организации ограждения места проведения работ и обеспечить автоматизированное оповещение работающих на путевых машинах в зонах их работы в зависимости от расстояния приближения поезда к их местоположению и от недопустимого сближения путевых машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2023 |
|
RU2817645C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| СИСТЕМА ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И ОГРАЖДЕНИЯ УЧАСТКА РАБОТ, РАЗМЕЩАЕМАЯ НА ПУТЕВОЙ МАШИНЕ (СОМП) | 2020 |
|
RU2737976C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И ОГРАЖДЕНИЯ УЧАСТКА РАБОТ С ПОМОЩЬЮ СИСТЕМЫ, РАЗМЕЩАЕМОЙ НА ПУТЕВОЙ МАШИНЕ (СОМП) | 2020 |
|
RU2739091C1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Цифровая система дистанционного радио- и громкоговорящего оповещения (СДРГО) "Элод-160МЦ" | 2023 |
|
RU2816377C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| Система оповещения работников на железнодорожных путях при производстве ремонтно-путевых работ | 2018 |
|
RU2701267C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
Техническое решение относится к средствам ограждения мест путевых работ с использованием робота-сигналиста. Робот выполнен в виде тележки с электроприводом с возможностью установки на рельсовые пути, на которой размещены радиомодем (5), блок задания координат (6) блок управления электроприводом тележки (7), блок формирования сообщений (8) также выполняющий функцию управления, блок обработки (9) видеокамеры (10), радиолокационный датчик (12), световой сигнализатор (13), речевой информатор (15), радиомодема (14) поездной радиосвязи, навигационный приемник (16), автономный источник питания. Достигается возможность исключения влияния человеческого фактора при организации ограждения мест проведения путевых работ. 2 н.п. ф-лы, 4 ил.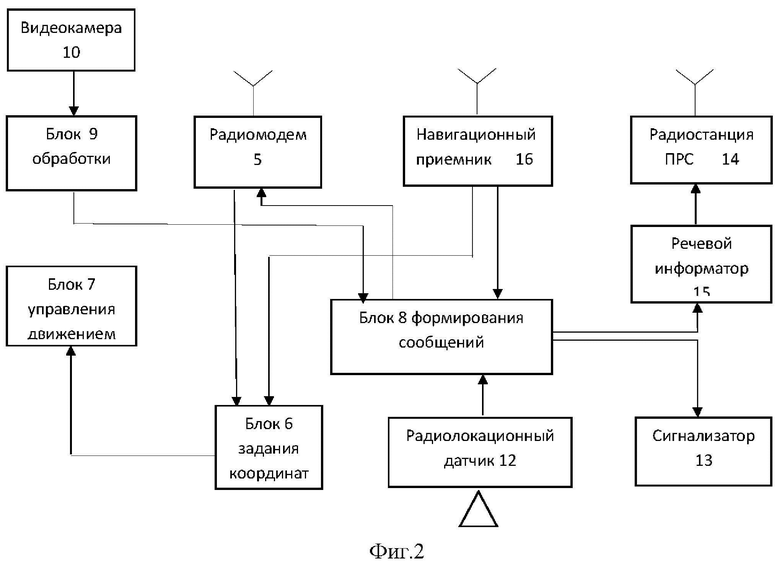
1. Робот-сигналист, характеризующийся тем, что выполнен в виде тележки с электроприводом и выполненной с возможностью установки на рельсовые пути, на которой размещены последовательно соединенные радиомодем, блок задания координат и блок управления электроприводом тележки, блок формирования сообщений, первый вход которого через блок обработки подключен к видеокамере, второй вход - к радиолокационному датчику, а выходы соответственно соединены с входом радиомодема и светового сигнализатора непосредственно и через речевой информатор с входом радиомодема поездной радиосвязи, и навигационный приемник, выходом подключенный ко второму входу блока задания координат и третьему входу блока формирования сообщений, и автономный источник питания.
2. Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути, характеризующаяся тем, что содержит блок управления оповещением и ограждением места проведения работ, установленный на месте проведения работ, оповещатель, размещенный на каждой путевой машине, участвующей в проведении капитального ремонта пути, и роботов-сигналистов, размещенных на ремонтируемом пути по обе стороны от места проведения работ на заданном расстоянии, каждый из которых выполнен по п. 1, при этом блок управления оповещением и ограждением места проведения работ включает блок управления, первый выход которого подключен через формирователь сообщений к блоку сопряжения, вход и выход которого соединен с выходом и входом радиомодема, формирователь сигналов оповещения, вход которого соединен со вторым выходом блока управления, другой вход - через блок формирования времени соединен с выходом навигационного приемника, а выход – со вторым входом формирователя сообщений, блок приема данных о поезде, входом подключенный ко второму выходу блока сопряжения, выходами – к входам блока видеоконтроля и блока управления, другой вход которого соединен с выходом регистратора данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя сигналов оповещения, а входом – к третьему выходу блока сопряжения, и автономный источник питания, каждый оповещатель включает контроллер, входы которого подключены к выходам радиомодема и блока номера установки путевой машины, а выходы соответственно - к входам блока оповещения, формирователя сообщений непосредственно и через блок сравнения к управляющему входу блока управления путевой машины, и навигационный приемник, выход которого соединен с другими входами блока сравнения и формирователя сообщений, выходом подключенного к входу радиомодема, причем входы питания элементов оповещателя подключены к сети питания путевой машины.
| DE 102007041718 A1, 05.03.2009 | |||
| Система контроля и оповещения при проведении работ в опасной зоне | 2020 |
|
RU2747307C1 |
| DE 102011006333 A1, 04.10.2012 | |||
| WO 2013146429 A1, 03.10.2013 | |||
| DE 102004024756 A1, 08.12.2005 | |||
| CN 111619617 A, 04.09.2020. | |||

