Группа изобретений относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для ограждения места работ и автоматизированного оповещения работающих на железнодорожных путях о приближении железнодорожного подвижного состава при капитальном ремонте с использованием робота-сигналиста.
Известен мобильный робототехнический комплекс, содержащий подвижную платформу с электроприводом и установленные на ней устройство фотовидеофиксации и устройство управления, устройство беспроводной зарядки аккумуляторных батарей, закреплённое на упомянутой платформе и подключённым к источнику питания в виде аккумуляторной батареи (RU160103 U1, B25J5/00, 10.03.2016).
Однако использование его для ограждения участка железнодорожного пути при проведении ремонтных работ не представляется возможным. Кроме того, комплект не позволяет определить скорость и длину объекта наблюдения.
Известно устройство оценки, обнаруживающее потенциально опасную ситуацию и активирующее устройство оповещения при проведении ремонтных работ на железнодорожном транспорте в виде робототехнического комплекса (дрона), выполненного с возможностью дистанционного управления перемещением и видеомониторинга окружающего пространства (DE 102007041718 A1, B61L23/06, 05.03.2009). Известное устройство выполняет контроль зоны проведения ремонтных работ, включая функцию сигналиста.
Однако на результаты оценки влияют погодные условия, как на управление его перемещением, так и на видеомониторинг.
Наиболее близким аналогом является робот-сигналист, выполненный в виде тележки с электроприводом и выполненной с возможностью установки на рельсовые пути, на которой размещены последовательно соединенные радиомодем, блок задания координат и блок управления электроприводом тележки, блок формирования сообщений, первый вход которого через блок обработки подключен к видеокамере, второй вход - к радиолокационному датчику, а выходы соответственно соединены с входом радиомодема и светового сигнализатора непосредственно и через речевой информатор с входом радиомодема поездной радиосвязи, и навигационный приемник, выходом подключенный ко второму входу блока задания координат и третьему входу блока формирования сообщений, и автономный источник питания (RU 2791772 C1, B61L 23/06, 13.03.2023).
Известный робот-сигналист в автоматическом режиме осуществляет контроль прохождения поезда по соседнему с ремонтируемым путем. Однако, для того чтобы необходимая для проведения ремонтных работ дополнительная путевая машина проехала к месту проведения работ, робота-сигналиста необходимо снимать с рельсового пути. Кроме того, робот-сигналист не обеспечивает контроль приема передачи информации по радиоканалу.
Известна система оповещения работающих о приближении железнодорожного подвижного состава при выполнении работ по ремонту инфраструктуры железнодорожного транспорта (СОРЖ), содержащая датчики обнаружения железнодорожного подвижного состава, системные блоки с радиопередатчиками, центральный блок управления с радиостанцией, коллективные переносимые оповещатели с радиостанциями, коллективные мобильные оповещатели с радиостанциями, ретранслятор, индивидуальные носимые оповещатели с радиоприемниками, датчики обнаружения подвижного состава, каждое из которых представляет собой переносимое устройство, устанавливаемое на подошву рельса с его наружной стороны на железнодорожном пути, по которому осуществляется движение поездов (RU2606755С1, B61L23/06, 10.01.2017).
В известном решении контроль функционирования датчиков обнаружения подвижного состава и системных блоков в автоматическом режиме осуществляет центральный блок управления под контролем сигналиста, находящегося на месте проведения работ, который в случае нарушения их функционирования сообщает об этом сигналисту ограждения и при получении соответствующего сообщения от него ручным способом включает сигнал оповещения и передает его по радиоканалу на коллективные и индивидуальные оповещатели.
Недостатком известной системы является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава для его реализации требуются тем не менее сигналисты, обеспечивающие ограждение границ участка работ.
Известна система ограждения места проведения работ и оповещения работающих на железнодорожных путях, содержащая установленные на подошве рельса железнодорожного пути на заданном расстоянии по обе стороны от границ места проведения работ датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств, размещенные на заданном расстоянии по обе стороны от границ места проведения работ, и установленные на месте проведения работ коллективный переносной оповещатель работающих, коллективные переносные оповещатели, установленные на путевых машинах, индивидуальные носимые оповещатели, приданные работающим, и коллективный переносной сигнализатор, при этом коллективный переносной сигнализатор выполнен с возможностью взаимодействия по радиоканалу с радиостанцией каждого датчика обнаружения подвижного состава, с сигнальными радиоуправляемыми устройствами, с коллективным переносным оповещателем, с коллективными переносными оповещателями, установленными на путевых машинах, и с индивидуальными носимыми оповещателями (RU 2655566 C1, B61L 23/06, 28.05.2018).
Однако в известной системе оповещение выполняется одновременно для всех путевых машин, находящихся на участке работ независимо от их местоположения относительно поезда, что при сравнительно низкой скорости движения поезда в зоне проведения капитального ремонта пути приводит к неоправданным задержкам в выполнении ремонтных работ.
Наиболее близким аналогом является известная система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути содержит блок управления оповещением и ограждением места проведения работ, установленный на месте проведения работ, оповещатель, размещенный на каждой путевой машине, участвующей в проведении капитального ремонта пути, и роботы-сигналисты, размещенные на ремонтируемом пути по обе стороны от места проведения работ на заданном расстоянии, при этом блок управления оповещением и ограждением места проведения работ включает блок управления, первый выход которого подключен через формирователь сообщений к блоку сопряжения, вход и выход которого соединен с выходом и входом радиомодема, формирователь сигналов оповещения , вход которого соединен со вторым выходом блока управления, другой вход - через блок формирования времени соединен с выходом навигационного приемника, а выход - со вторым входом формирователя сообщений, блок приема данных о поезде, входом подключенный ко второму выходу блока сопряжения, выходами - к входам блока видеоконтроля и блока управления, другой вход которого соединен с выходом регистратора данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя сигналов оповещения , а входом - к третьему выходу блока сопряжения и . автономный источник питания, каждый оповещатель включает контроллер, входы которого подключены к выходам радиомодема и блока номера установки путевой машины, а выходы соответственно - к входам блока оповещения, формирователя сообщений непосредственно и через блок сравнения к управляющему входу блока управления путевой машины, и навигационный приемник, выход которого соединен с другими входами блока сравнения и формирователя сообщений, выходом подключенного к входу радиомодема, причем входы питания элементов оповещателя подключены к сети питания путевой машины (RU 2791772 C1, B61L 23/06, 13.03.2023).
В известной системе оповещение выполняется для всех путевых машин, находящихся на участке работ в зависимости от их местоположения относительно поезда движущегося в зоне проведения капитального ремонта пути. Однако отсутствует возможность контроля организации радиоканала приема и передач телеметрической информации между блоком оповещением и ограждением места проведения работ, роботом-сигналистом, блоками оповещения путевых машин, что снижает уровень безопасности проведения работ
Техническим результатом изобретения в части робота-сигналиста является автоматизация режима снятия робота-сигналиста с рельсов в случае необходимости для проведения ремонтных работ дополнительной путевой машины и установки на рельсы для осуществления контроля прохождения поезда по соседнему пути, а также повышение безопасности работающих при проведении капитального ремонта пути и безопасности движения поездов за счет контроля приема и передачи информации по радиоканалу.
Техническим результатом изобретения в части системы является повышение безопасности работающих при проведении капитального ремонта пути и безопасности движения поездов за счет контроля радиоканалов приема и передач телеметрической информации блоком управления оповещением и ограждением места проведения работ, контроля приема и передачи информации по радиоканалу блоками оповещения путевых машин и роботами-сигналистами и видеоконтроля в зоне работ путевых машин, а также расширение функциональных возможностей за счет автоматизации режима снятия с рельсов робота-сигналиста в случае необходимости для проведения ремонтных работ дополнительной путевой машины и установки его на рельсы.
Технический результат в части робота-сигналиста достигается тем, что он выполнен в виде платформенной тележки с электроприводом для перемещения по рельсовому пути, колеса которой выполнены с возможностью съема с рельсов с помощью механизма съема, а корпус платформы снабжен телескопическими опорами, внутри корпуса платформы установлены последовательно соединенные радиомодем с телескопической антенной и блок управления, блок формирования сообщений, блок обработки видеосигналов, навигационный приемник с телескопической антенной, последовательно соединенные речевой информатор и радиостанция поездной радиосвязи, подключенная к антенне радиомодема, блок контроля радиосигналов, входом соединенный с соответствующим выходом радиомодема, автономный блок питания, а также электропривод тележки, механизмы управления телескопическими опорами корпуса платформы и съема колес тележки с рельсов, на внешней стороне корпуса тележки установлены видеокамера, соединенная с входом блока обработки видеосигналов, солнечная батарея, подключенная к блоку питания, радиолокационный датчик и световой сигнализатор, подключенный к выходу блока формирования сообщений, другие выходы которого соединены с входами речевого информатора и радиомодема, а входы - с выходами блока обработки видеосигналов, блока контроля радиосигналов, радиолокационного датчика и навигационного приемника, выход которого подключен также к другому входу блока управления, при этом выходы блока управления подключены к управляющим входам электропривода тележки, механизма съема колес с рельсов, механизмов управления телескопическими опорами корпуса тележки и телескопическими антеннами, причем ширина корпуса платформы меньше расстояния между рельсами, а его высота с элементами, размещенными на его внешней стороне, не превышает 150 мм.
Технический результат в части системы ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути достигается тем, что система содержит блок управления оповещением и ограждением места проведения работ, установленный на месте проведения работ, устройство оповещения, размещенное на каждой путевой машине, участвующей в проведении капитального ремонта пути, и установленные на заданном расстоянии по обе стороны от места проведения работ роботы-сигналисты, каждый из которых выполнен в виде платформенной тележки с электроприводом для перемещения по рельсовому пути, колеса которой выполнены с возможностью съема с рельсов с помощью механизма съема, а корпус платформы снабжен телескопическими опорами, внутри корпуса платформы установлены последовательно соединенные радиомодем с телескопической антенной и блок управления, блок формирования сообщений, блок обработки видеосигналов, навигационный приемник с телескопической антенной, последовательно соединенные речевой информатор и радиостанция поездной радиосвязи, подключенная к антенне радиомодема, блок контроля радиосигналов, входом соединенный с соответствующим выходом радиомодема, автономный блок питания, а также электропривод тележки, механизмы управления телескопическими опорами корпуса платформы и съема колес тележки с рельсов, на внешней стороне корпуса тележки установлены видеокамера, соединенная с входом блока обработки видеосигналов, солнечная батарея, подключенная к блоку питания, радиолокационный датчик и световой сигнализатор, подключенный к выходу блока формирования сообщений, другие выходы которого соединены с входами речевого информатора и радиомодема, а входы - с выходами блока обработки видеосигналов, блока контроля радиосигналов, радиолокационного датчика и навигационного приемника, выход которого подключен также к другому входу блока управления, при этом выходы блока управления подключены к управляющим входам электропривода тележки, механизма съема колес с рельсов, механизмов управления телескопическими опорами корпуса тележки и телескопическими антеннами, причем ширина корпуса платформы меньше расстояния между рельсами, а его высота с элементами, установленными на его внешней стороне, не превышает 120 мм, при этом блок управления оповещением и ограждением места проведения работ включает блок управления, первый выход которого подключен через формирователь сообщений к блоку сопряжения, вход и выход которого соединен с выходом и входом радиомодема, формирователь сигналов оповещения, входами соединенный со вторым выходом блока управления и выходом сервера контроля и управления радиоканалов непосредственно, а через блок формирования времени - с выходом навигационного приемника, выходом - со вторым входом формирователя сообщений, блок приема данных о поезде, входом подключенный ко второму выходу блока сопряжения, выходами - к входам блока видеоконтроля и блока управления, другой вход которого соединен с выходом регистратора данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя сигналов оповещения, а входом - к третьему выходу блока сопряжения, четвёртый выход которого соединен с входом сервера контроля и управления радиоканала, и автономный источник питания, каждое устройство оповещения включает контроллер, входы которого подключены к выходам радиомодема и блока номера установки путевой машины, а выходы соответственно - к первым входам блока оповещения, формирователя сообщений непосредственно и через блок сравнения к управляющему входу блока управления путевой машины, навигационный приемник, выход которого соединен со вторыми входами блока сравнения и формирователя сообщений, выходом подключенного к входу радиомодема, блок контроля радиосигналов, входом подключенный к соответствующему выходу радиомодема, а выходами - к третьему входу формирователя сообщений и второму входу блока оповещения, другие входы которого соединены с вторым выходом блока сравнения и выходом блока обработки видеосигналов, подключенного к видеокамерам, установленных по обе стороны путевой машины.
Система может использовать широкополосный канал передачи данных.
Кроме того, система может включать видеокамеры, установленные на путевых машинах, а устройства оповещения - блок обработки, входами соединенный с видеокамерами, а выходами - с четвертым входом блока оповещения. Это позволяет осуществлять контроль за проведением работ в зоне местоположения путевых машин.
Сущность изобретения поясняется чертежами на фиг. 1- 4. На фиг. 1 представлена структурная схема системы ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути, на фиг. 2 - структурная схема робота-сигналиста, на фиг. 3 - структурная схема блока управления оповещением и ограждением места проведения работ, на фиг. 4 - блок оповещения путевых машин.
Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути содержит блок 1 управления ограждением места проведения работ и оповещением работающих (БУСО 1), устройства 2 оповещения (УОПМ 2), расположенные на путевых машинах 3 (ПМ3), и роботы-сигналисты 4. При этом УОПМ 2 и роботы-сигналисты 4 выполнены с возможностью взаимодействия по радиоканалу с БУСО 1.
Каждый робот-сигналист 4 выполнен в виде платформенной тележки с электроприводом 5 для перемещения по рельсовому пути, каждое колесо которой выполнены с возможностью съема с рельсов с помощью механизма 6 съема колес, а корпус платформы снабжен телескопическими опорами (на фиг. 2 не показаны), внутри корпуса платформы установлены последовательно соединенные радиомодем 7 с телескопической антенной 8 и блок 9 управления, блок 10 формирования сообщений, блок 11 обработки видеосигналов, навигационный 12 приемник с телескопической антенной 13, последовательно соединенные речевой информатор 14 и радиостанция 15 поездной радиосвязи, подключенная к антенне 8 радиомодема 7, блок 16 контроля радиосигналов, входом соединенный с соответствующим выходом радиомодема 7, автономный блок 17 питания, а также электропривод 5 тележки, механизмы 6, 18 и 19 соответственно съема колес тележки с рельсов, управления телескопическими антеннами и опорами корпуса платформы, а на внешней стороне корпуса тележки установлены видеокамера 20, соединенная с входом блока 11 обработки видеосигналов, солнечная батарея 21, подключенная к блоку 17 питания, радиолокационный датчик 22 и световой сигнализатор 23, подключенный к выходу блока 10 формирования сообщений, другие выходы которого соединены с входами речевого информатора 14 и радиомодема 7, а входы - с выходами блока 11 обработки видеосигналов, блока 16 контроля радиосигналов, радиолокационного датчика 22 и навигационного приемника 12, выход которого подключен также к другому входу блока 9 управления, выходом соединенного с управляющими входами электропривода 5 тележки, механизмов 6 съема колес с рельсов, механизмов 19 и 18 управления соответственно телескопическими опорами корпуса тележки и телескопическими антеннами 8 и 13, причем ширина корпуса платформы меньше расстояния между рельсами, а его высота с элементами, установленными на его внешней стороне, не превышает 150 мм.
БУСО 1 включает блок 24 управления, первый выход которого подключен через формирователь 25 сообщений к блоку 26 сопряжения, вход и выход которого соединен с выходом и входом радиомодема 27, формирователь 28 сигналов оповещения, входами соединенный со вторым выходом блока 24 управления и выходом сервера 29 контроля и управления радиоканалов непосредственно, а через блок 30 формирования времени - с выходом навигационного приемника 31, выходом - со вторым входом формирователя 25 сообщений, блок 32 приема данных о поезде, входом подключенный ко второму выходу блока 26 сопряжения, выходами - к входам блока 33 видеоконтроля и блока 24 управления, другой вход которого соединен с выходом регистратор 34 данных размещения путевых машин, входами/выходами подключенного к выходам/входами формирователя 28 сигналов оповещения, а входом - к третьему выходу блока 26 сопряжения, четвёртый выход которого соединен с входом сервера 29 контроля и управления радиоканала, и автономный источник питания (на фиг. 3 не показан).
Антенна 8 выполнена с возможностью обеспечения работы радиомодема 7 и радиостанции 15 поездной радиосвязи.
Каждое УОПМ 2 включает контроллер 35, входы которого подключены к выходам радиомодема 36 и блока 37 данных установки ПМ 3, а выходы соответственно - к первым входам блока 38 оповещения, формирователя 39 сообщений непосредственно и через блок 40 сравнения к управляющему входу блока 41 управления ПМ 3, навигационный приемник 42, выход которого соединен со вторыми входами блока 40 сравнения и формирователя 39 сообщений, выходом подключенного к входу радиомодема 36, блок 43 контроля радиосигналов, входом подключенный к соответствующему выходу радиомодема 36, а выходом - ко третьему входу формирователя 39 сообщений и второму входу блока 38 оповещения, другие входы которого соединены с вторым выходом блока 40 сравнения и выходом блока 44 обработки видеосигналов, подключенного к видеокамерам 45, установленных по обе стороны путевой машины.
Входы питания элементов УОПМ 2 подключены к сети питания ПМ 3.
Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути функционирует следующим образом.
Руководитель работ по капитальному ремонту пути задает режимы функционирования системы посредством БУСО 1.
Перед началом работы выполняют режим формирования данных о номерах и последовательности расположения путевых машин 3 (ПМ 3) на участке капитального ремонта железнодорожного пути. С каждой сторон участка капитального ремонта пути на рельсы устанавливают робота-сигналиста 4 и включают питание, при этом в автоматическом режиме телескопические антенны 8 и 13 с помощью механизмов 18 устанавливаются в рабочее состояние.
На каждой ПМ 3 в УОПМ 2 с помощью блока 37 устанавливают соответствующий номер её установки на участке проведения работ, данные о котором блок 37 передает в контроллер 35. Кроме того, на каждой ПМ 3 навигационный приемник 42 определяет координаты её местоположения и в режиме реального времени передает их в формирователь 39 сообщений.
При этом блок 24 управления БУСО 1 формирует соответствующую команду формирователю 25 сообщений, который через блок 26 сопряжения, радиомодем 27 по радиоканалу и радиомодем 36 передает ее на вход контроллера 35 каждого УОПМ 2. Контроллер 35 каждого УОПМ 2 после получение команды от БУСО 1 направляет данные о номере установки ПМ3 формирователю 39, который формирует сообщение, содержащее данные о номере установки ПМ3 на участке проведения работ и координатах ее местоположения, и передает его через радиомодем 36 по радиоканалу на вход радиомодема 7 БУСО 1.
Данные, полученные от каждого УОПМ 2, радиомодем 27 направляет через блок 26 сопряжения регистратору 34, который формирует реестр последовательности расположения ПМ 3 на участке капитального ремонта пути с указанием координат их местонахождения.
На основе данных о координатах местонахождения первой и последней ПМ 3 на участке проведения ремонта, получаемой от регистратора 34, блок 24 управления вычисляет требуемое по условиям безопасности координаты местоположения каждого робота-сигналиста 4 для ограждения места проведения работ и через формирователь сообщений 25, блок 26 сопряжения и радиомодем 27 по радиоканалу передает информацию о координатах установки на радиомодем 7 робота-сигналиста 4. Радиомодем 7 каждого робота-сигналиста 4 передает их в блок 9 управления.
Блок 9 управления сравнивает координаты местоположения робота-сигналиста 4, полученные от навигационного приемника 12, с координатами, заданными блоком 24 управления БУСО1, и при разности координат передает соответствующую команду электроприводу 5 на перемещение тележки. При совпадении координат блок 9 управления передает команду электроприводу 5 для остановки тележки, а также формирует и передает соответствующую команду включения исполнительного механизмов 19 управления телескопическими опорами для фиксации робота-сигналиста 4 в заданном местоположении путем приведения опор в рабочее состояние.
Кроме того, блок 24 управления БУСО 1 осуществляет контроль за расположением ПМ 3 на участке проведения работ. На основании данных регистратора 34 блок 24 управления вычисляет расстояние между ПМ3 и при недопустимом для безопасности сближении соседних ПМ 3 определяет координаты местоположения каждой ПМ 3, отвечающие условиям безопасности.
Блок 24 управления информацию о координате каждой путевой машины последовательно через формирователь 25, блок 26 сопряжения, радиомодем 27 по радиоканалу передает в радиомодем 36 каждого УОПМ 2. Радиомодем 36 полученную информацию передает в контроллер 35, который направляет ее в блок 40, на другой вход которого в режиме реального времени поступает информация от навигационного приемника 42 о координате местонахождения ПМ3. Блок 40 сравнивает координаты местоположения ПМ3, полученные от навигационного приемника 42, с координатами, заданными блоком 24 управления БУОП 1, и при разности координат формирует соответствующую команду в блок 41 управления на перемещение ПМ3 и включении блока 38 оповещения. При совпадении координат блок 40 формирует соответствующую команду блоку 41 для установки ПМ3 в требуемое положение, и команду на отключение блока 38 оповещения.
УОПМ 2 при проведении работ осуществляет видеоконтроль за местом проведения работ в зоне местоположения ПМ 3. Видеокамеры 45, установленные с разных сторон ПМ3 в режиме реального времени осуществляют видеосъемку, а блок 44 осуществляет обработку видеосигналов и в случае нарушений требований безопасности, например, не соблюдения требований по обеспечению габарита для путевых машин, выполняющих ремонт пути (наличие выступающих частей крана или др. механизмов) передает в блок 38 команду на включение оповещения.
При перемещениях ПМ3 роботы-сигналисты 4 также аналогичным образом по команде БУСО 1 перемещаются для изменения своего местоположения, отвечающего требуемым по условиям безопасности места ограждения проведения работ, при этом перед началом изменения местоположения блок 9 управления робота-сигналиста 4 формирует команду исполнительному механизму 19 для приведения опор в нерабочее состояние.
Контроль прохождения поезда по соседнему пути с ремонтируемым путем осуществляют роботы-сигналисты 4 дистанционно с помощью радиолокационного датчика 22 и видеокамеры 20.
При входе поезда на соседний путь радиолокационный датчик 22 регистрирует данные о входе поезда, о его скорости и длине и передает их в блок 10 формирования сообщений. Видеокамера 20 регистрирует видеоизображение на месте размещения робота-сигналиста 4 и соответственно вход поезда на соседний путь. Блок 11 преобразовывает соответствующим образом видеоизображение и передает его в блок 10. В блок 10 формирования сообщений в режиме реального времени поступает также информация от навигационного приемника 12 о координатах местоположения робота-сигналиста 4, соответствующих координатам входа поезда. На основе полученных данных блок 10 формирует сообщение, включающее данные о координатах входа поезда, его скорости и длине, а также обработанные данные видеосигналов, которое через радиомодем 7 по радиоканалу передает в радиомодем 27 БУСО 1.
При этом блок 10 формирования сообщений через речевой информатор 14 и радиостанцию 15 по радиоканалу поездной связи информирует машиниста поезда о входе на участок приближения к месту проведения работ по капитальному ремонту. Одновременно блок 10 формирует команду на включение сигнализатора 23.
Радиомодем 27 данные о координатах входа поезда, его скорости и длине, а также данные видеоизображений поезда через блок 26 сопряжения передает в блок 32 данных о поезде. Данные о видеоизображении поезда блок 32 направляет в блок 33 видеоконтроля, с помощью которого руководитель работ осуществляет видеонаблюдение за местом установки роботов-сигналистов 4.
Данные о координатах входа поезда, его скорости и длине блок 32 направляет в блок 24 управления, который одновременно с данными о координатах поезда, его скорости и длине передает формирователю 28 команду на формирование сигналов оповещения. В формирователь 28 поступает также информация о точном времени, сформированным блоком 30 на основе данных навигационного приемника 31.
Формирователь 28, получив команду на формирование сигналов оповещения , запрашивает данные о координатах размещении путевых машин на участке ремонта у регистратора 34. Формирователь 34 с учетом координат местоположения каждой ПМ 3 и ее номера установки на участке капитального ремонта и данных о координатах поезда, его скорости и длине, в также данных точного времени определяет время входа поезда и вычисляет время задержки включения сигнала оповещения для каждой ПМ 3 с учетом выполнения требования по времени безопасного оповещения. Данные о времени задержки включения сигнала оповещения для каждой ПМ 3 с указанием ее номера установки формирователь 28 передает в формирователь 25. На основании полученных данных формирователь 25 передает последовательно сообщение о включении оповещения на каждую ПМ 3 с учетом вычисленной задержки через блок 26 сопряжения, радиомодем 27 по радиоканалу на радиомодем 36.
Радиомодем 36 каждой ПМ 3 направляет полученное сообщение контроллеру 35, который передает команду блоку 38 для включения сигнала оповещения работающим в зоне ПМ 3. Такой режим обеспечивает минимизацию непроизводительных затрат времени рабочего персонала во время прохождения поезда по участку капитального ремонта пути.
Для обеспечения контроля радиоканала в состав БУСО1 включен сервер 29 контроля и управления радиоканала, а в состав УОПМ 2 и роботов-сигналистов 4 - соответственно блоки 43 и 16 контроля радиосигналов, каждый из которых обеспечивает контроль уровня принимаемого радиосигнала, сравнивает его с пороговым значением и, если уровень принимаемого сигнала ниже порогового значения, передает его соответственно формирователю 39 и 10 для передачи по радиоканалу в сервер 29 контроля радиоканала БУСО 1, который формирует команду формирователю 28 для соответствующего оповещения.
Кроме того, на каждой ПМ 3 радиомодемы 36 выполнены управляемыми, обеспечивающие взаимодействие с абонентами в зоне ПМ3 и ретрансляцию команд БУСО1 на соседнюю ПМ 3.
При необходимости для проведения капитального ремонта пути дополнительных ПМ 3, которые должны пройти по пути, на котором расположен робот-сигналист 4, руководитель с помощью блока 24 управления БУСО 1 дает команду формирователю 25 для передачи соответствующего сообщения через блок 26 сопряжения, радиомодем 27 по радиоканалу радиомодему 7. Радиомодем 7 полученное сообщение направляет в блок 9 управления робота-сигналиста 4.
Блок 9 управления формирует команду механизмам 6 съема колес с рельсов, после чего дает команду управления механизмам 19 и 18 соответственно управления телескопическими опорами и телескопическими антеннами для изменения своего положения. Механизм 6 съема колёс с рельсов выполнен электромагнитным.
При этом робот-сигналист 4 медленно опускается в колею пути.
Согласно установленным требованиям максимальная высота верхнего края робота-сигналиста 4 при установки его в колею пути не должна превышать значения, определенного габаритами приближения строения для устройств, устанавливаемых в колее пути от уровня головки рельса (ГОСТ 92-38-2013, Габариты железнодорожного подвижного состава и приближения строений).
С учетом установленных требований ширина корпуса платформы тележки меньше расстояния между рельсами, а его высота с элементами, размещенными на его внешней стороне, не превышает 150 мм, что не мешает дополнительной ПМ 3 проехать по пути над роботом-сигналистом.
После прохождения над роботом-сигналистом 4 дополнительной ПМ 3 его контроллер 35 дает команду формирователю 39 для передачи соответствующего сообщения о свободности пути через радиомодем 36 по радиоканалу радиомодему 7. Полученное сообщение радиомодем 7 предает в блок 9 управления, который передает исполнительным механизмам 19 и 18 команду для изменения своего положения соответственно опор корпуса платформы и антенн 1 и 13. При выдвижении опор корпус платформы медленно поднимается на соответствующую высоту для возможности установки колес робота-сигналиста на рельсы, и только после этого блок 9 управления дает команду исполнительному механизму 6 для установки колес тележки на рельсы.
Кроме того, после прохода дополнительной ПМ 3 осуществляется аналогичным образом расстановка ПМ 3 на месте проведения работ, отвечающая условиям безопасности.
После чего робот-сигналист 4 аналогичным образом по команде БУСО 1 перемещается для изменения своего местоположения, отвечающего требуемым по условиям безопасности места ограждения проведения работ, при этом перед началом изменения местоположения блок 9 управления формирует команду исполнительному механизму 19 для приведения опор в положение, не мешающее передвижению робота-сигналиста 4.
После остановки робота-сигналиста 4 в требуемое положение блок 9 управления формирует и передает соответствующую команду включения исполнительного механизмов 19 управления телескопическими опорами для фиксации роботов-сигналистов 4 в заданном местоположении путем приведения опор в соответствующее положение.
В этом положении робот-сигналист 4 аналогичным образом обеспечивает контроль прохождения поезда по соседнему пути с помощью радиолокационного датчика 22 и видеокамеры 20.
Таким образом, предлагаемая группа изобретений повысить безопасность работающих при проведении капитального ремонта пути и безопасности движения поездов за счет контроля радиоканалов приема и передач телеметрической информации блоком управления оповещением и ограждением места проведения работ, контроля приема и передачи информации по радиоканалу блоками оповещения путевых машин и роботами-сигналистами и видеоконтроля в зоне работ, а также расширить функциональные возможности за счет автоматизации режимов снятия с рельсов робота-сигналиста в случае необходимости для проведения ремонтных работ дополнительной путевой машины и установки его на рельсы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2022 |
|
RU2791772C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Способ оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ | 2022 |
|
RU2780241C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| СПОСОБ ОПОВЕЩЕНИЯ РАБОТАЮЩИХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА ПРИ ВЫПОЛНЕНИИ РАБОТ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2606755C1 |
| Цифровая система дистанционного радио- и громкоговорящего оповещения (СДРГО) "Элод-160МЦ" | 2023 |
|
RU2816377C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И ОГРАЖДЕНИЯ УЧАСТКА РАБОТ С ПОМОЩЬЮ СИСТЕМЫ, РАЗМЕЩАЕМОЙ НА ПУТЕВОЙ МАШИНЕ (СОМП) | 2020 |
|
RU2739091C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |


Группа изобретений относится к средствам ограждения места работ и автоматизированного оповещения работающих на железнодорожных путях. Робот-сигналист (4) выполнен в виде платформенной тележки и включает электропривод (5), механизм (6) съема колес, радиомодем (7) с телескопической антенной (8), блок (9) управления, блок (10) формирования сообщений, блок (11) обработки видеосигналов, навигационный (12) приемник с телескопической антенной (13), речевой информатор (14), радиостанцию (15) поездной радиосвязи, блок (16) контроля радиосигналов, автономный блок (17) питания, механизм (6) съема колес тележки с рельсов, механизм (18) управления телескопическими антеннами, механизм (19) управления опорами корпуса платформы, видеокамеру (20), солнечную батарею (21), радиолокационный датчик (22), световой сигнализатор (23). Причем ширина корпуса платформы меньше расстояния между рельсами, а его высота с элементами, установленными на его внешней стороне, не превышает 150 мм. Достигается возможность автоматизации снятия робота-сигналиста с рельсов при проведении ремонтных работ дополнительной путевой машиной и установке на рельсы для осуществления контроля прохождения поезда по соседнему пути. 2 н.п. ф-лы, 4 ил.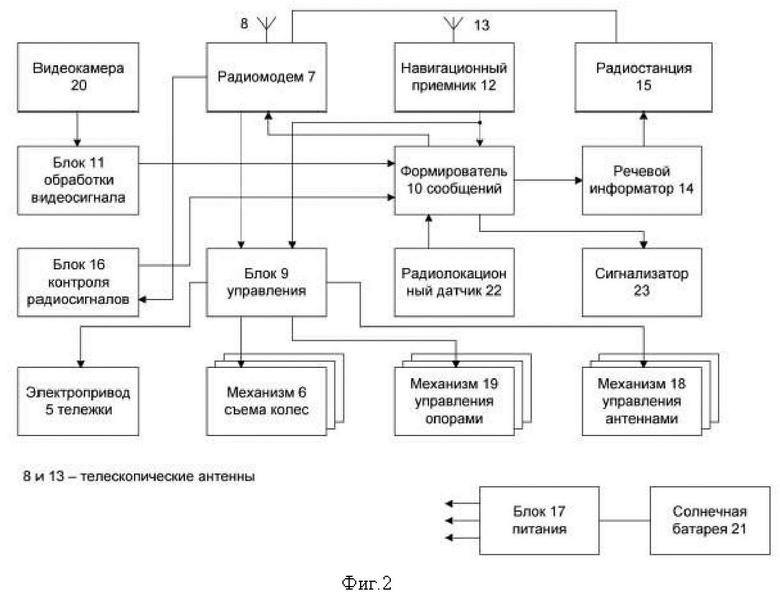
1. Робот-сигналист, характеризующийся тем, что выполнен в виде платформенной тележки с электроприводом для перемещения по рельсовому пути, колеса которой выполнены с возможностью съема с рельсов с помощью механизма съема, а корпус платформы снабжен телескопическими опорами, внутри корпуса платформы установлены последовательно соединенные радиомодем с телескопической антенной и блок управления, блок формирования сообщений, блок обработки видеосигналов, навигационный приемник с телескопической антенной, последовательно соединенные речевой информатор и радиостанция поездной радиосвязи, подключенная к антенне радиомодема, блок контроля радиосигналов, входом соединенный с соответствующим выходом радиомодема, автономный блок питания, а также электропривод тележки, механизмы управления телескопическими опорами корпуса платформы и съема колес тележки с рельсов, на внешней стороне корпуса тележки установлены видеокамера, соединенная с входом блока обработки видеосигналов, солнечная батарея, подключенная к блоку питания, радиолокационный датчик и световой сигнализатор, подключенный к выходу блока формирования сообщений, другие выходы которого соединены с входами речевого информатора и радиомодема, а входы – с выходами блока обработки видеосигналов, блока контроля радиосигналов, радиолокационного датчика и навигационного приемника, выход которого подключен также к другому входу блока управления, при этом выходы блока управления подключены к управляющим входам электропривода тележки, механизма съема колес с рельсов, механизмов управления телескопическими опорами корпуса тележки и телескопическими антеннами, причем ширина корпуса платформы меньше расстояния между рельсами, а его высота с элементами, установленными на его внешней стороне, не превышает 150 мм.
2. Система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути, характеризующаяся тем, что содержит блок управления оповещением и ограждением места проведения работ, установленный на месте проведения работ, устройство оповещения, размещенное на каждой путевой машине, участвующей в проведении капитального ремонта пути, и установленные на заданном расстоянии по обе стороны от места проведения работ роботы-сигналисты по п. 1, при этом блок управления оповещением и ограждением места проведения работ включает блок управления, первый выход которого подключен через формирователь сообщений к блоку сопряжения, вход и выход которого соединены с выходом и входом радиомодема, формирователь сигналов оповещения, входами соединенный со вторым выходом блока управления и выходом сервера контроля и управления радиоканалов непосредственно, а через блок формирования времени - с выходом навигационного приемника, выходом – со вторым входом формирователя сообщений, блок приема данных о поезде, входом подключенный ко второму выходу блока сопряжения, выходами – к входам блока видеоконтроля и блока управления, другой вход которого соединен с выходом регистратора данных размещения путевых машин, входами/выходами подключенного к выходам/входам формирователя сигналов оповещения, а входом – к третьему выходу блока сопряжения, четвёртый выход которого соединен с входом сервера контроля и управления радиоканала, и автономный источник питания, каждое устройство оповещения включает контроллер, входы которого подключены к выходам радиомодема и блока номера установки путевой машины, а выходы соответственно - к первым входам блока оповещения, формирователя сообщений непосредственно и через блок сравнения к управляющему входу блока управления путевой машины, навигационный приемник, выход которого соединен со вторыми входами блока сравнения и формирователя сообщений, выходом подключенного к входу радиомодема, блок контроля радиосигналов, входом подключенный к соответствующему выходу радиомодема, а выходами – к третьему входу формирователя сообщений и второму входу блока оповещения, другие входы которого соединены со вторым выходом блока сравнения и выходом блока обработки видеосигналов, подключенного к видеокамерам, установленным по обе стороны путевой машины.
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2022 |
|
RU2791772C1 |
| DE 102007041718 A1, 05.03.2009 | |||
| Система контроля и оповещения при проведении работ в опасной зоне | 2020 |
|
RU2747307C1 |
| DE 102011006333 A1, 04.10.2012 | |||
| WO 2013146429 A1, 03.10.2013 | |||
| СИСТЕМА СЦЕПЛЕНИЯ ТЕЛЕЖКИ ДЛЯ ПРЕОБРАЗУЕМОГО ЖЕЛЕЗНОДОРОЖНО-ШОССЕЙНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2171191C2 |

