[0001] Данная заявка испрашивает приоритет предварительной патентной заявки США № 62/851,498, поданной 22 мая 2019, и не-предварительной патентной заявки США № 16/880,595, поданной 21 мая 2020, которые полностью включены в настоящий документ посредством ссылки.
Область техники
[0002] Варианты осуществления настоящего изобретения относятся к локации (определению местоположения) подземной линии и, в частности, к системе подземного локатора с кинематикой в реальном времени и глобальным спутниковым позиционированием.
Обсуждение предшествующего уровня техники
[0003] Процесс локации подземного (заглубленного) оборудования (труб и кабелей) с использованием низкочастотных сигналов хорошо известен и широко принимается в качестве рабочей практики. Приборы локации линии обычно включают в себя решетку разнесенных антенн, которые принимают изменяющиеся во времени сигналы магнитного поля, генерируемые самим подземным оборудованием. Такие сигналы могут быть результатом токов, вводимых в подземное оборудование отдельным передатчиком или присущих самому подземному оборудованию, например, из линий электропередач. Решетка разнесенных антенн принимает магнитные поля, которые часто имеют конкретные частоты. Электронные средства обработки в приборе локации линии определяют относительное положение оборудования по отношению к системе локации линии, включая глубину, сигнальные токи и другую информацию. Горизонтальное положение и глубина подземного коммунального оборудования (коммуникаций) могут затем, например, отображаться пользователю и, в некоторых системах, записываться относительно положения локатора линии.
[0004] Все в большей степени, применения для систем локации линий используются в картографировании коммунального оборудования. Желательно, чтобы такое картографирование подземного оборудования было как можно более точным. Следовательно, существует потребность в разработке систем локации линий с высокоточным определением положения.
Краткое изложение сущности изобретения
[0005] В соответствии с некоторыми вариантами осуществления, представлен точный (прецизионный) локатор линии для точной локации подземной линии. Точный локатор линии в соответствии с некоторыми вариантами осуществления включает в себя корпус; щуп, прикрепленный к корпусу, причем щуп включает в себя решетку низкочастотных антенн, расположенных вдоль щупа, решетка низкочастотных антенн определяет электромагнитную локационную ось системы локатора линии; антенну кинематики в реальном времени (RTK) глобальной навигационной спутниковой системы (GNSS), прикрепленную к корпусу; пользовательский интерфейс, расположенный в корпусе; и схему обработки, связанную с решеткой низкочастотных антенн, антенной RTK GNSS и пользовательским интерфейсом, при этом локатор подземной линии определяет локационные данные подземной линии на основе сигналов от решетки низкочастотных антенн и определяет точное положение локатора подземной линии от антенны RTK GNSS.
[0006] Способ точного определения положения подземной линии включает в себя локацию подземной линии в положении с точным локатором линии, при этом точный локатор линии содержит решетку низкочастотных антенн, расположенных вдоль щупа, решетка низкочастотных антенн образует электромагнитную локационную ось; расположение точного локатора линии в первой ориентации; определение и регистрацию локационных данных линии; расположение точного локатора линии во второй ориентации, где антенна кинематики в реальном времени (RTK) глобальной навигационной спутниковой системы (GNSS) позиционирована так, чтобы обеспечивать точное положение; и определение и регистрацию точного положения с локационными данными линии.
[0007] Эти и другие варианты осуществления обсуждаются ниже со ссылкой на следующие чертежи.
Краткое описание чертежей
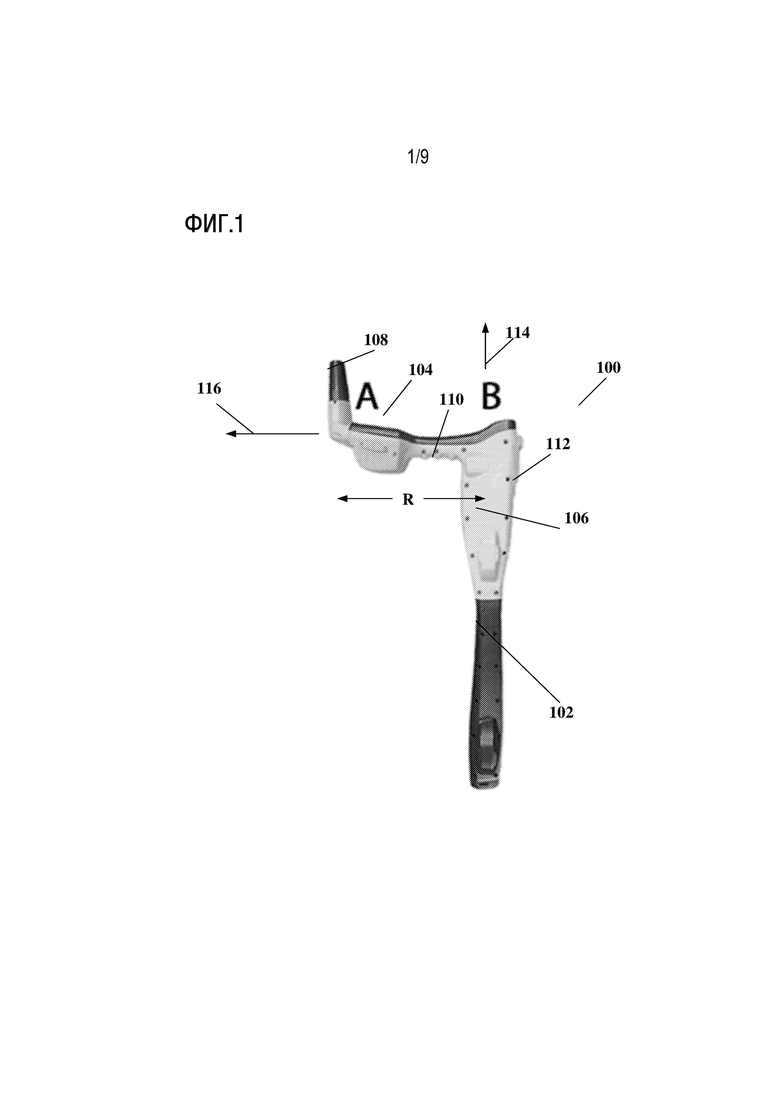
[0008] Фиг. 1 иллюстрирует точный локатор подземной линии в соответствии с некоторыми вариантами осуществления.
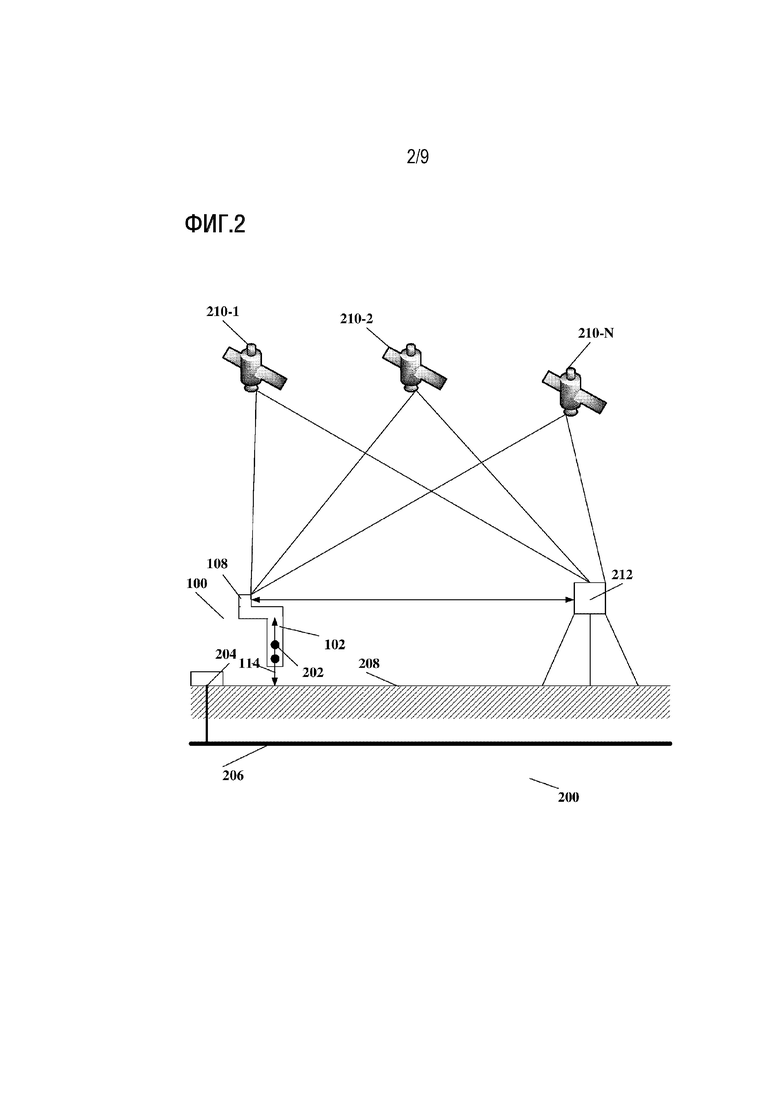
[0009] Фиг. 2 иллюстрирует работу системы точного локатора подземной линии с использованием точного локатора линии, как показано на фиг. 1.
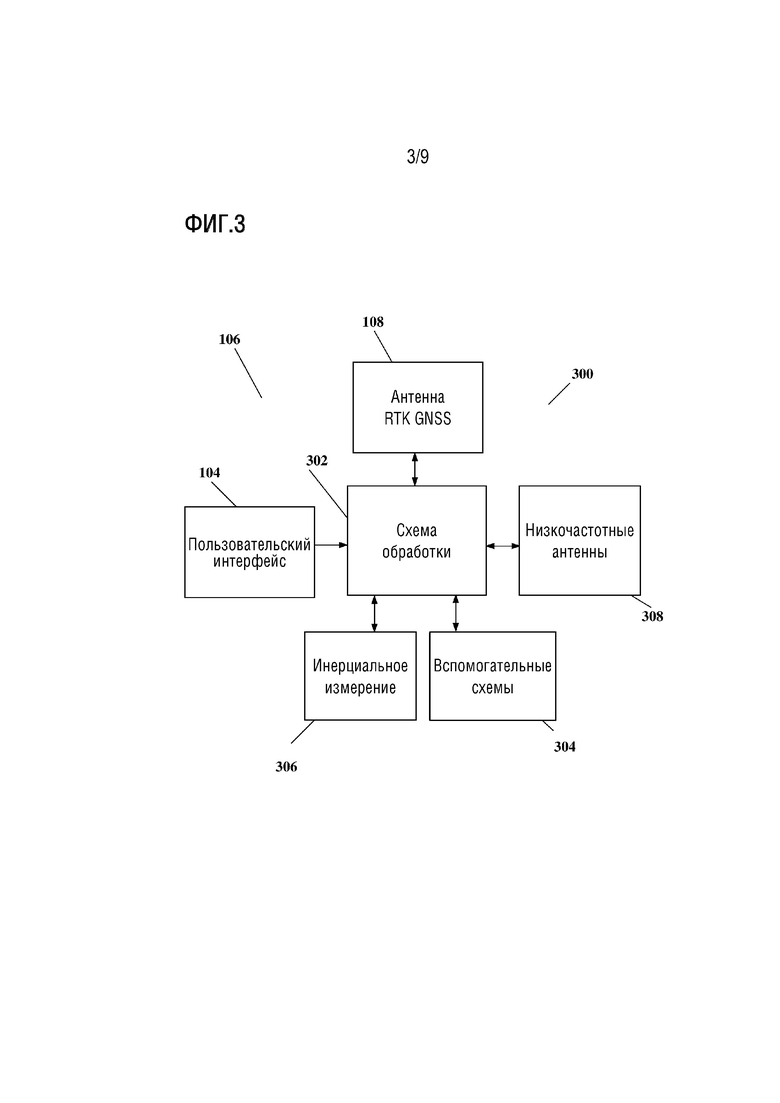
[0010] Фиг. 3 иллюстрирует блок-схему, иллюстрирующую схему некоторых вариантов осуществления локатора линии, как показано на фиг. 1.
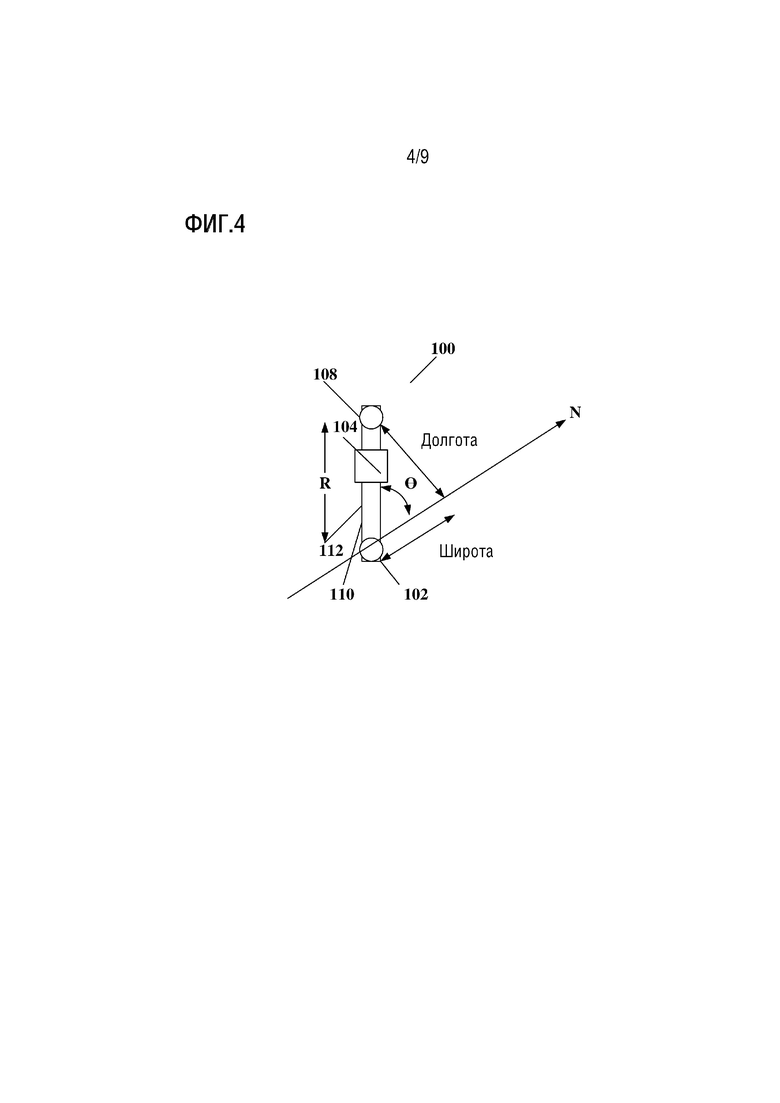
[0011] Фиг. 4 иллюстрирует геометрию, иллюстрирующую коррекцию точного локационного положения для работы точного локатора линии, как показано на фиг. 1.
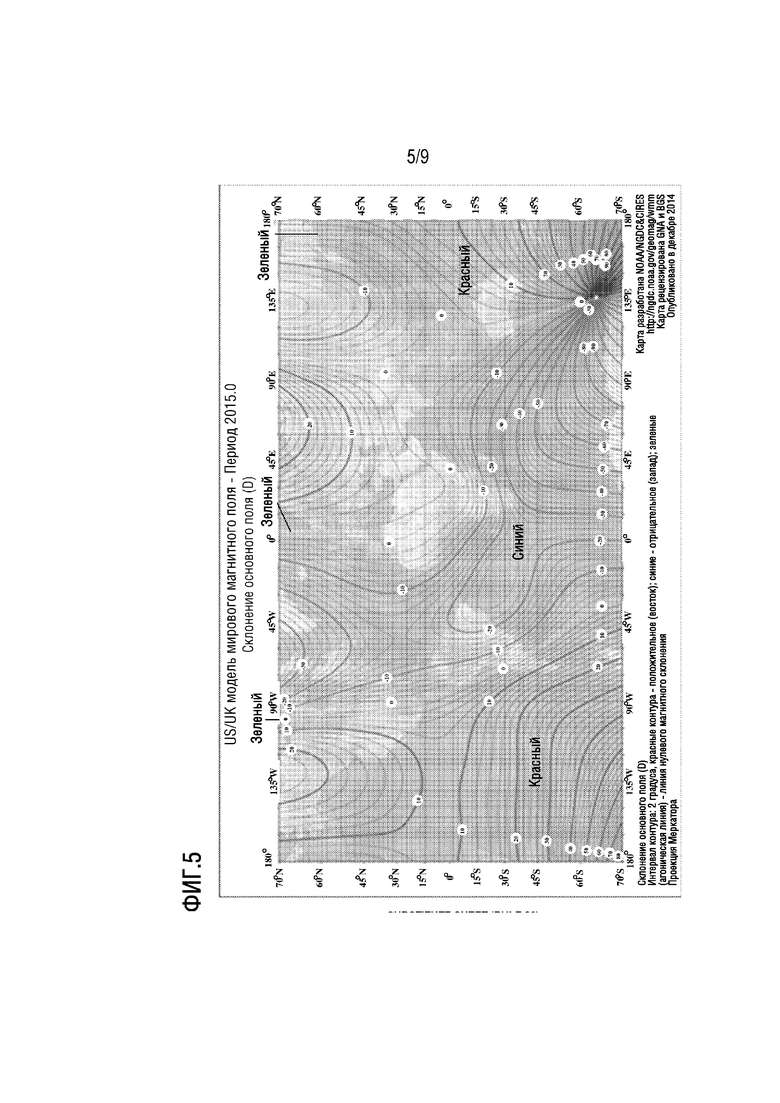
[0012] Фиг. 5 иллюстрирует линии склонения магнитного поля модели мирового магнитного поля.
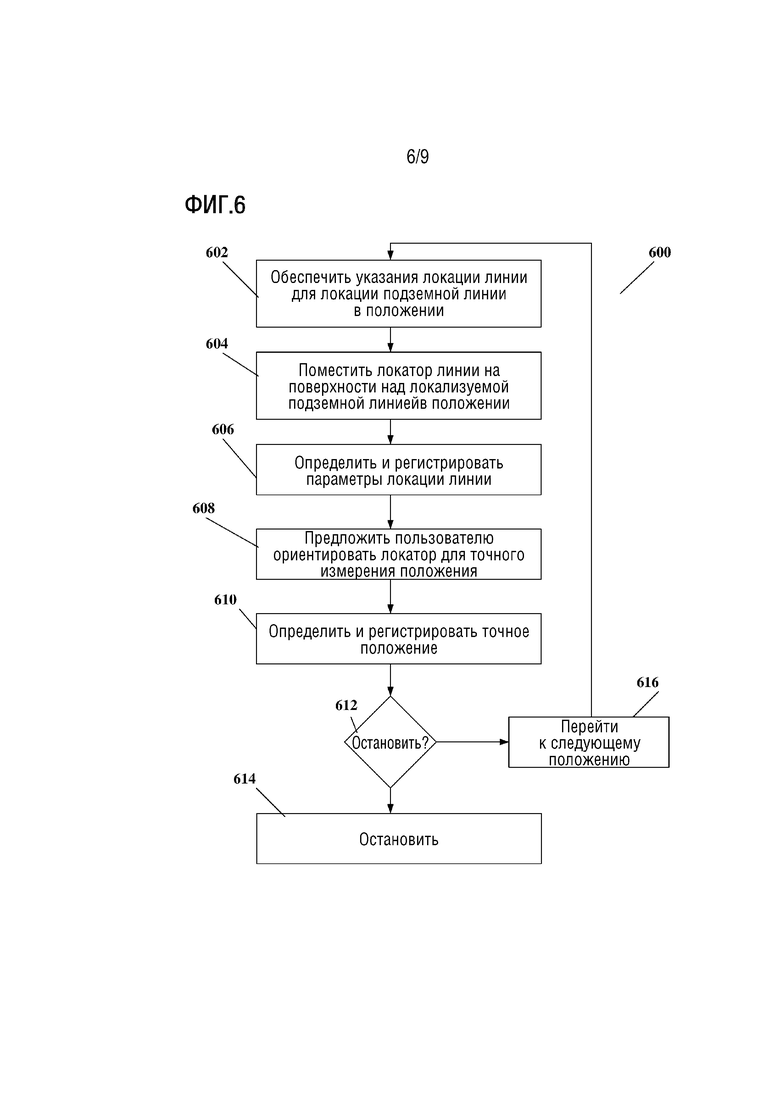
[0013] Фиг. 6 иллюстрирует блок-схему последовательности операций для работы системы точного локатора линии в соответствии с некоторыми вариантами осуществления настоящего изобретения.
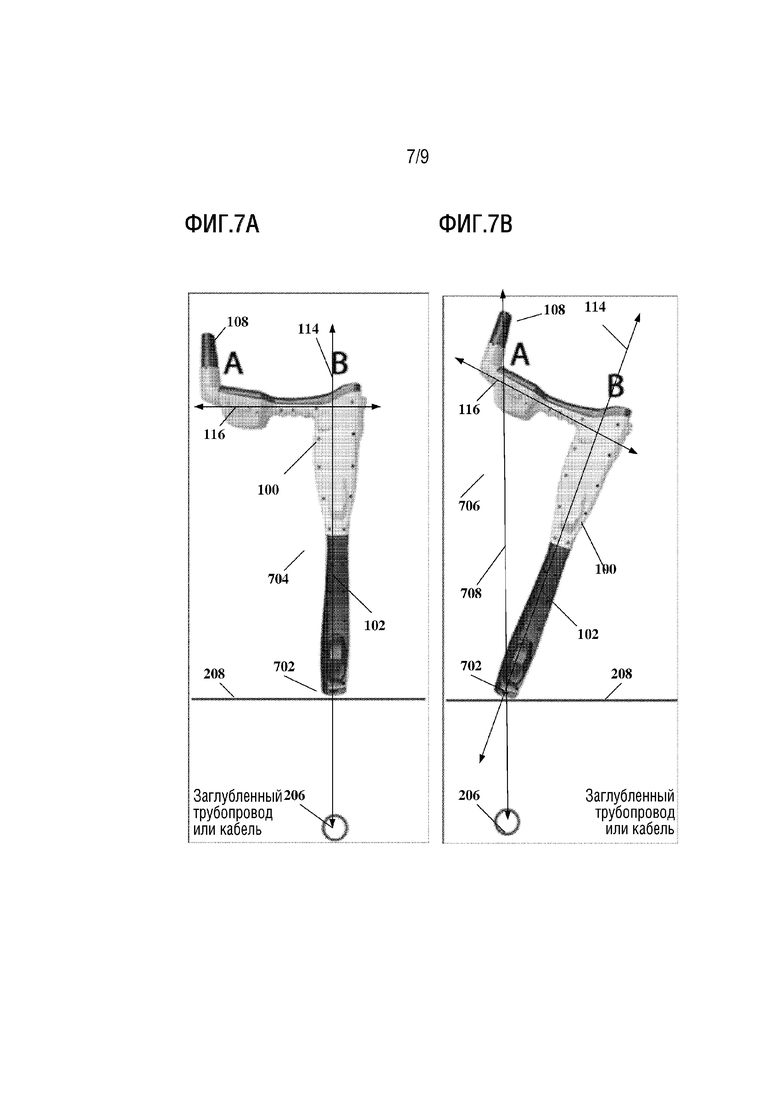
[0014] Фиг. 7A и 7B иллюстрируют рабочую ориентацию точного локатора линии, как показано на фиг. 1.
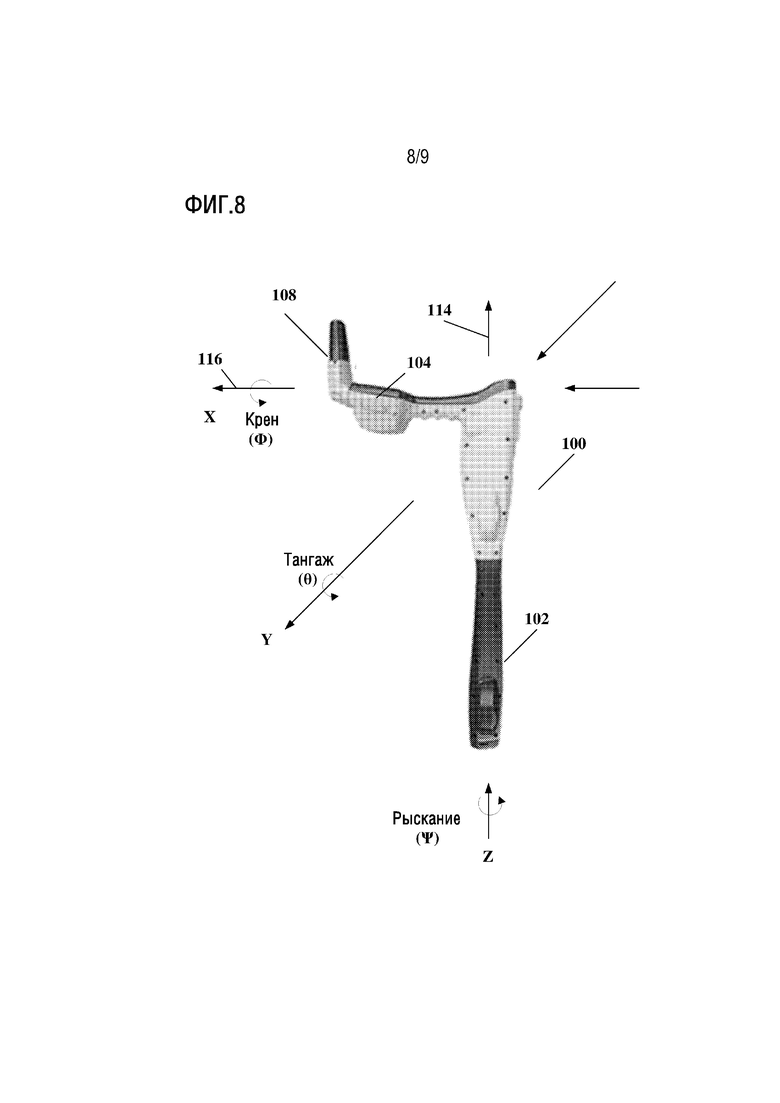
[0015] Фиг. 8 иллюстрирует работу инерциального измерительного блока, который может быть включен в некоторые варианты осуществления локатора линии, как показано на фиг. 1.
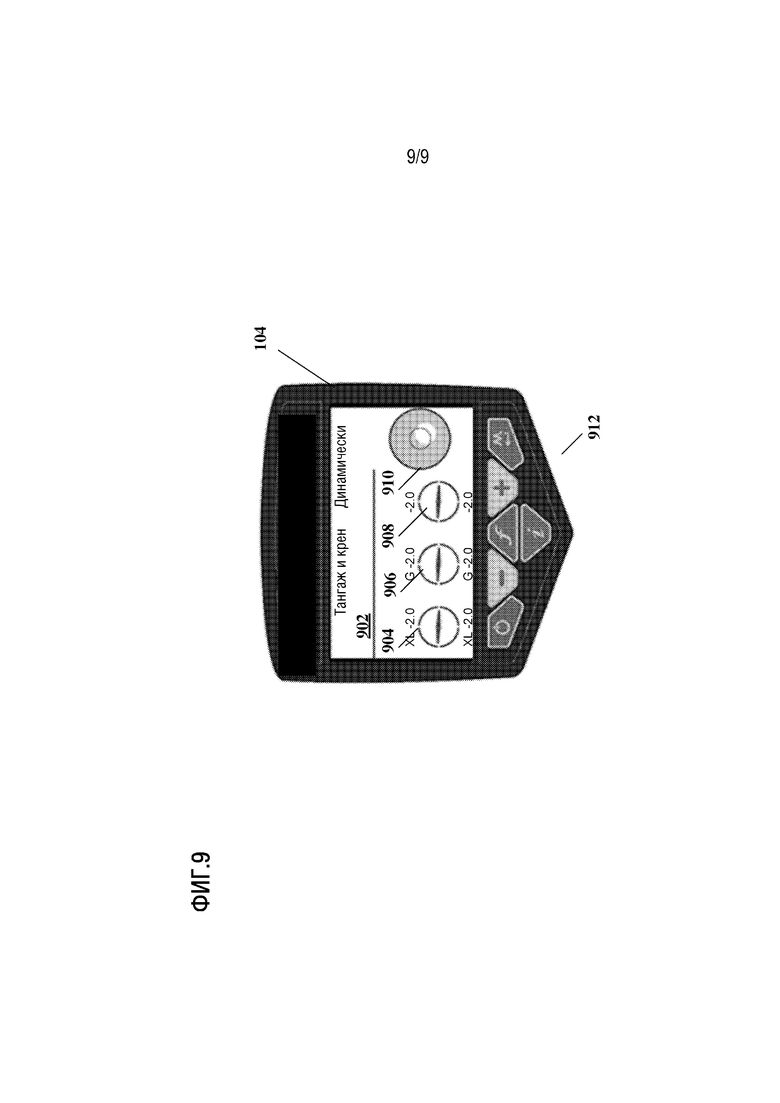
[0016] Фиг. 9 иллюстрирует пользовательский интерфейс, иллюстрирующий измерение крена, наклона и рыскания, измеряемых в некоторых вариантах осуществления точного локатора линии, как показано на фиг. 1, которая включает в себя инерциальный измерительный блок.
[0017] Эти чертежи наряду с другими вариантами осуществления дополнительно обсуждаются ниже.
Подробное описание
[0018] В последующем описании изложены конкретные детали, описывающие некоторые варианты осуществления настоящего изобретения. Однако специалисту в данной области техники будет очевидно, что некоторые варианты осуществления могут быть осуществлены на практике без некоторых или всех этих конкретных подробностей. Конкретные варианты осуществления, раскрытые в данном документе, предназначены для иллюстрации, но не для ограничения. Специалист в данной области техники может реализовать другие элементы, которые, хотя конкретно не описаны здесь, находятся в пределах объема и сущности настоящего раскрытия.
[0019] Это описание иллюстрирует аспекты изобретения, и варианты осуществления не должны рассматриваться как ограничивающие - формула изобретения определяет объем защиты изобретения. Могут быть сделаны различные изменения без отклонения от сущности и объема этого описания и формулы изобретения. В некоторых случаях, хорошо известные структуры и способы не показаны или не описаны подробно, чтобы не затруднять понимание изобретения.
[0020] Последние разработки в спутниковых системах позиционирования или глобальной навигационной спутниковой системе (GNSS) способствуют прецизионному определению местонахождения по координатной сетке с точностью позиционирования в несколько см. Кроме того, кинематика в реальном времени (RTK) может использоваться в сочетании с гео-пространственной информацией и повышать точность положения в реальном времени - истинно оперативного ("на лету") позиционирования с горизонтальной точностью RMS 10 см (фактическая точность варьируется по поверхности земного шара, 10 см представляет собой типичную точность) или меньше.
[0021] Объединение систем локации кабеля с GNSS для формирования карт съемки является общепринятым. Однако эти системы имеют тенденцию к неточностям построения. Варианты осуществления согласно настоящему изобретению решают конкретную проблему, возникающую в результате развертывания антенны GNSS на приборе для локации кабеля. В частности, посредством добавления RTK, неточности, связанные с определением положения локализуемой подземной линии с использованием локатора с поддержкой GNSS, могут быть снижены.
[0022] На фиг. 1 показан точный локатор 100 линии или прибор для локации кабеля, в соответствии с некоторыми вариантами осуществления. Вариант осуществления, проиллюстрированный на фиг. 1, может включать в себя структуру 102 щупа, которая вмещает антенны для локации линии. Антенны локации линии расположены вдоль длины структуры 102 щупа. Структура 102 щупа может содержать любое количество антенн локации линии, которые ориентированы так, чтобы измерять магнитные поля, исходящие из нижних слоев грунта в нескольких ортогональных измерениях, и могут быть ориентированы вдоль структуры 102 щупа для измерения глубины подземной линии. В некоторых вариантах осуществления, структура 102 щупа может содержать шесть (6) антенн. Первый набор из трех антенн расположен так, чтобы измерять магнитные поля в трех ортогональных направлениях, и установлен в первом положении вдоль структуры 102 щупа. Второй набор из трех антенн расположен так, чтобы измерять магнитные поля в трех ортогональных направлениях, и установлен во втором положении вдоль структуры 102 щупа. Структура 102 щупа, таким образом, определяет локационную ось 114, которая проходит вдоль центральной оси первого и второго набора антенн, размещенных в структуре 102 щупа. Со сконфигурированным набором антенн, изменяющееся во времени магнитное поле может быть охарактеризовано по трем измерениям, и разница в магнитных полях в двух отдельных положениях вдоль локационной оси 114 структуры 102 щупа обеспечивает информацию для определения глубины и ориентации локализуемой подземной линии. Как правило, антенны, размещенные в структуре 102 щупа, предназначены для обнаружения низкочастотных кабелей, что является хорошо известным способом.
[0023] Точный локатор 100 линии дополнительно включает в себя высокочастотную антенну 108 RTK GNSS для спутникового декодирования. Антенна 108 RTK GNSS представляет собой антенну высокой точности, поскольку требование состоит в том, чтобы выполнять фазо-чувствительные измерения для использования в сочетании с системами RTK, чтобы определять точные географические прецизионные измерения антенны 108.
[0024] На фиг. 1 дополнительно показано, что точный локатор 100 линии включает в себя рукоятку 110, которая может использоваться пользователем для удержания системы 100, когда пользователь проводит точный локатор 100 линии над подземной линией, которая локализуется. Кроме того, точный локатор линии включает в себя пользовательский интерфейс 104, который принимает пользовательский ввод и предоставляет данные пользователю во время использования. Пользовательский интерфейс 104 удобно размещен в точном локаторе 100 линии для применения пользователем. Схема 106 может дополнительно быть включена в точный локатор 100 линии для выполнения операций локатора 100 линии.
[0025] Как проиллюстрировано в конкретном примере, показанном на фиг. 1, предусмотрен корпус 112, имеющий форму, обеспечивающую удобство и функциональность. Схема 106 и пользовательский интерфейс 104 могут быть установлены в корпусе 112. Рукоятка 110 может быть выполнена по форме корпуса 112. Антенна 108 RTK GNSS и структура 102 щупа установлены на корпусе 112. Корпус 112 имеет удобную форму, позволяющую пользователю манипулировать точным локатором 100 во время проведения локатора 100 над подземной линией. Корпус 112 определяет продольную ось 116 локатора вдоль корпуса 112 между осью 114 локатора и антенной 108 RTK GNSS.
[0026] Фиг. 2 иллюстрирует функциональную операцию системы 200 точного определения местоположения линии, которая включает в себя точный локатор 100 линии в соответствии с некоторыми вариантами осуществления. Как показано на фиг. 2, точный локатор 100 линии расположен над заглубленной линией 206, которая заглублена на определенном расстоянии под поверхностью 208. Заглубленная линия 206, как правило, связана с передатчиком 204, который вводит АС сигнал в линию 206. В некоторых применениях, например, линии электропередач, линия 206 может переносить сигнал от другого источника. Во многих случаях АС сигнал, введенный в линию 206 передатчиком 204, может иметь конкретную частоту, которая обнаруживается посредством точного локатора 100 линии. Приемные антенны 202, которые размещены в структуре 102 щупа, обнаруживают магнитное поле, генерируемое АС сигналом в подземной линии 206. Точный локатор 100 линии может, используя сигналы от антенн 202, которые возникают в результате магнитных полей, генерируемых линией 206, определять положение линии 206 относительно локатора 100.
[0027] В соответствии с некоторыми вариантами осуществления, точное положение антенны 108 RTK GNSS, которая соединена с точным локатором 100 линии, определяется посредством антенны 108 RTK GNSS. Следовательно, как только положение подземной линии 206 определено с помощью точного локатора 100 линии, точное положение точного локатора 100 линии определяется с помощью антенны 108 RTK GNSS. Следовательно, может быть определено и зарегистрировано точное географическое местоположение линии 206. Картография линии 206 может выполняться посредством определения точного географического местоположения линии 206 по ряду местоположений вдоль линии 206.
[0028] Позиционирование кинематики в реальном времени (RTK) относится к методу спутниковой навигации, используемому для повышения точности данных позиционирования в антенне 108 RTK. Позиционирование RTK использует стационарный приемник 212, который комбинируется с антенной 108 RTK GNSS. Каждый из стационарного приемника 212 и приемника 108 RTK GNSS осуществляет связь с множеством спутников 210 глобального позиционирования, из которых проиллюстрированы спутники от 210-1 до 210-N.
[0029] Как хорошо известно, расстояние до приемника, такого как стационарный приемник 212 или приемник 108, может быть определено путем вычисления времени, которое требуется сигналу для прохождения от спутника до приемника. Эта задержка может быть вычислена на основе информации, передаваемой в спутниковом сигнале. Вычисление расстояния между приемником и рядом спутников и известные местоположения спутников обеспечивает точное определение местоположения приемника. Однако точность, которая может быть достигнута, ограничена до метра или более, в зависимости от условий, которые могут включать в себя, например, времена распространения на основе атмосферных условий или других помех сигналам.
[0030] Позиционирование RTK следует той же самой общей концепции, но использует сигнал несущей от каждого из спутников 210-1 до 210-N вместе со стационарным приемником 212 для обеспечения точности по положению 1 см или менее. В частности, RTK использует несущую волну спутникового сигнала от каждого из спутников 210-1 до 210-N для уточнения местоположения базовой станции 212. Базовая станция 212 определяет поправку местоположения, определенного обычными способами, посредством определения на основе фазовых сдвигов несущей волны и отправляет поправку местоположения в приемник 108 RTK GNSS. В частности, каждое из RTK GNSS 108 и базовой станции 212 измеряет разность фаз и RTK GNSS 108 принимает разность фаз, измеренную базовой станцией 212, для сравнения с разностью фаз, определяемой ее измерением, для определения поправки.
[0031] Следовательно, антенна 108 RTK GNSS используется с системой, которая использует методы кинематики в реальном времени, вместо позиционирования на основе кода при стандартном глобальном позиционировании. RTK представляет собой метод, который использует ранжирование (определение дальности) на основе несущей частоты и предоставляет дальности (и, следовательно, положения), которые являются на порядки величины более точными, чем те, которые доступны посредством позиционирования на основе кода.
[0032] На практике, система RTK использует единственный приемник 212 базовой станции, расположенный в известном местоположении, вместе с мобильной станцией, которая в этом применении представляет собой антенну 108 RTK точной системы 100 локации. Базовая станция 212 ретранслирует фазу несущей, которую она наблюдает, и антенна 108 RTK сравнивает свои собственные фазовые измерения с измерением, принятым от базовой станции. Это позволяет антенне 108 RTK системы 100 точной локации вычислять ее относительное положение относительно базовой станции 212 с высокой точностью, в некоторых случаях в пределах миллиметров. Фактическое местоположение является тогда точным в пределах точности местоположения базовой станции 212, часто в пределах 1 сантиметра ±1 ppm по горизонтали и в пределах 2 сантиметров ±1 ppm по вертикали. Это приводит к точности ±1 см на километр. В некоторых вариантах осуществления, базовая станция 212 может представлять собой одну из общих базовых станций RTK-TRIP (Сетевой транспорт Радиотехнической комиссии для морских услуг (RTCM) по Интернет-протоколу). Такая точность является очень ценной при включении в систему 100 точной локации линии для картографирования местоположения подземных коммуникаций.
[0033] Положение антенны 108 RTK GNSS в системе 100 локатора может быть очень важным для работы системы 100 точного локатора линии. Хотя антенна 108 RTK GNSS может быть установлена в любом месте на корпусе 112 системы 100 точного локатора линии, для хорошей работы антенна 108 RTK GNSS может быть расположена так, чтобы иметь беспрепятственный обзор небесной сферы. Если антенна 108 RTK GNSS имеет препятствия, то определение точного местоположения может оказаться невозможным. Следовательно, во многих вариантах осуществления, антенна 108 RTK GNSS устанавливается на расстоянии R от локационной оси 114.
[0034] Некоторые существующие применения приемников GNSS предусматривают установку приемника на высокой выдвижной мачте, которая размещает приемник над головой оператора. Однако такая компоновка не будет удовлетворительно функционировать в системе локации линии, поскольку она очень неудобна для манипулирования. Хотя ранее не применялись в системах локации линии, приемники RTK GNSS использовались в системе, такой как геодезическое оборудование. Эти системы используют высокую выдвижную мачту, чтобы гарантировать расположение антенны RTK GNSS над головой любого пользователя. Такие системы хорошо работают, но являются неудобными и непрактичными для использования в системе локатора кабеля.
[0035] Хотя размещение антенны 108 RTK GNSS в положении на корпусе 112, который непосредственно выровнен с локационной осью 114 щупа 102 (положение B, указанное на фиг. 1), которая выровнена с антеннами 202, это положение может не быть идеальным. Размещение антенны 108 RTK GNSS в положении, обозначенном ‘В’ на фиг. 1, может привести к существенному затенению небесной сферы из-за относительного положения пользователя, этот эффект обычно называется ‘затенением человеком’. Хотя и непрактичное, положение В гарантирует, что антенна 108 RTK GNSS выровнена по той же вертикальной оси, что и собственная электромагнитная ось локатора, обозначенная как локационная ось 114 (определяемая решеткой низкочастотных антенн 202), это положение приводит к затенению антенны 108 RTK GNSS, что может отрицательно влиять на функцию точного определения местоположения локатора 100 или даже может сделать локатор 100 линии неработоспособным в качестве точного локатора линии.
[0036] Следовательно, в вариантах осуществления в соответствии с настоящим раскрытием, антенна 108 RTK GNSS размещается в местоположении на корпусе 112, где она имеет свободный обзор небесной сферы и, вероятно, не может затеняться оператором локатора 100 линии, манипулирующим локатором 100 линии с помощью рукоятки 110. Как проиллюстрировано на фиг. 1, антенна 108 RTK GNSS может, например, быть соединена в положении A корпуса 112 с точным локатором 100 линии. Принимая во внимание вышеприведенные моменты, можно сделать вывод, что позиция ‘A’ является хорошей опцией и имеет лишь незначительное влияние на общую эргономику для работы точного локатора 100 линии. Однако, размещение антенны 108 RTK GNSS в позиции ‘A’ создает другую собственную ошибку, которая будет обсуждена ниже. А именно, антенна 108 RTK GNSS смещена от электромагнитной локационной оси 114 точного локатора 100 линии, как определяется антеннами 202, установленными в структуре 102 щупа.
[0037] Фиг. 3 иллюстрирует примерную блок-схему 300, иллюстрирующую схему 106 системы 100 точной локации линии, как показано на фиг. 1. Как показано на фиг. 2, схема 106 включает в себя схему 302 обработки. Схема 302 обработки может представлять собой любую комбинацию электронных средств, памяти, процессоров, микрокомпьютеров, микроконтроллеров или других устройств, которая принимает и обрабатывает данные, как описано ниже. В частности, схема 302 обработки может включать в себя по меньшей мере один процессор, исполняющий инструкции, хранящиеся в памяти. Память включает в себя комбинацию энергозависимой и энергонезависимой памяти, которая хранит инструкции и данные, которые исполняются для точной локации и картографирования одной или более подземных линий 206, как дополнительно описано ниже. Во время картографирования, запрашиваемая схема 302 обработки по запросу регистрирует локационную информацию (глубину, ток, напряженности магнитного поля, боковое смещение и т.д.) от локатора и регистрирует информацию точного положения от антенны 108 RTK GNSS в одном или более положениях вдоль подземной линии 206, чтобы сохранить точное картографирование местоположения подземной линии 206. Это картографирование может быть выполнено по более чем одной подземной линии, чтобы полностью картографировать коммуникации в географической области.
[0038] Как показано на фиг. 3, схема 302 обработки принимает данные от пользовательского интерфейса 104, причем пользовательский интерфейс 104 может быть любым пользовательским интерфейсом, установленным в корпусе 112. Пользовательский интерфейс 104 может, например, включать в себя экран дисплея, который может представлять собой сенсорный экран, расположенные физические кнопки, динамики, микрофоны и/или другие устройства, которые позволяют схеме 302 обработки предоставлять информацию оператору точного локатора 100 линии и позволяют оператору вводить параметры. Такие параметры могут быть использованы, например, для конфигурирования рабочих параметров точного локатора 100 линии или управления конфигурацией дисплея. Кроме того, пользовательский интерфейс 104 может позволять пользователю указывать маркировку подземной линии и запись точного положения, как измерено посредством антенны 108 RTK GNSS. Кроме того, пользовательский интерфейс 104 может включать в себя интерфейс с другим устройством для передачи сохраненных данных, обновления инструкций, хранящихся в памяти схемы 302 обработки, или выполнения других функций. В некоторых вариантах осуществления, пользовательский интерфейс 104 может включать в себя интерфейс беспроводной связи, такой как Bluetooth или другой стандарт связи, для выполнения функций выгрузки и загрузки точного локатора 100 линии. В некоторых вариантах осуществления, физические интерфейсы, такие как, например, USB-интерфейсы, могут быть использованы для загрузки данных из или выгрузки данных в точный локатор 100 линии. В некоторых вариантах осуществления, пользовательский интерфейс 104 может включать в себя интерфейсы для беспроводного соединения с локальной сетью и/или могут включать в себя сотовую услугу для связи с облачными службами, например, для отображения подземных коммуникаций.
[0039] Схема 302 обработки также связана со схемой 308 низкочастотных антенн, которая включает в себя антенны 202. Схема 308 низкочастотных антенн может включать в себя рамочные антенны в качестве приемных антенн 202, которые способны измерять изменяющиеся во времени магнитные поля, генерируемые в подземной линии 206 в результате передачи сигналов в подземную линию 206 передатчиком 204 или собственными переносимыми сигналами в подземной линии 206 (например, сигналами линии электропередачи). Схема 302 обработки может, в некоторых случаях, обеспечивать цифровые сигналы для управления конфигурацией антенн 308. Схема 308 низкочастотных антенн включает в себя схемы для приема сигналов от приемных антенн 202 и предоставления оцифрованных принятых сигналов в схему 302 обработки. Например, антенная схема 308 включает в себя аналоговые фильтры и аналого-цифровые преобразователи, которые сконфигурированы для обеспечения цифровых сигналов. Затем антенная схема 308 выдает оцифрованные сигналы, указывающие напряженности магнитного поля от каждой из приемных антенн 202, в схему 302 обработки.
[0040] Вспомогательные схемы 304 могут включать в себя любую схему, которая дополнительно используется с локатором 100, например, схему управления мощностью или любые аналого-цифровые или цифро-аналоговые схемы, фильтрации аналоговых сигналов или других действий.
[0041] В некоторых вариантах осуществления, схема 302 обработки соединена с инерциальным измерительным блоком (IMU) 306. IMU 306 может содержать комбинации акселерометров, гироскопов и/или магнетометров, которые обеспечивают измерения ускорения и ориентации точного локатора 100 линии. В общем, IMU 306 может включать в себя любое число акселерометров, гироскопов и/или магнитометров для измерения ускорения по отношению к набору осей относительно точного локатора 100 линии. Например, IMU 306 может включать в себя три акселерометра, расположенных, чтобы измерять ускорения вдоль трех ортогональных осей, и три гироскопа, расположенные, чтобы измерять угловое ускорение вокруг каждой из трех ортогональных осей. В некоторых вариантах осуществления, IMU 306 может включать в себя магнитометры, которые измеряют магнитные поля вдоль трех ортогональных осей. Данные ускорения от IMU 306 в цифровой форме подаются в схему 302 обработки, которая может определять текущую ориентацию датчика 100 точного положения. В некоторых вариантах осуществления, ориентация может быть определена относительно локационной оси 114 и оси 116 локатора.
[0042] Схема 302 обработки также соединена с антенной 108 RTK GNSS. Антенна 108 RTK GNSS включает в себя антенны и приемные схемы для приема спутниковых сигналов от спутников 210 и антенны и приемные схемы для приема данных фазы от базовой станции 212. В некоторых вариантах осуществления, базовая станция 212 и антенна 108 RTK GNSS могут осуществлять связь с использованием UHF-сигнализации. Однако любой способ связи может использоваться для предоставления данных в антенну 108 RTK GNSS от базовой станции 212.
[0043] Методы RTK могут включать в себя комплексное вычисление на основе принятых сигналов от спутников 210 и данных фазы от базовой станции 212. В некоторых вариантах осуществления, антенна 108 RTK GNSS включает в себя схемы обнаружения и обработки, которые определяют точное местоположение антенны 108 RTK GNSS в соответствии с спутниковыми сигналами, как обсуждалось выше. В этом случае, антенна 108 RTK GNSS обеспечивает точные позиционные данные в схему 302 обработки. В некоторых вариантах осуществления, антенна RTK GNSS может предоставлять принятые сигналы от спутников 210 и данные фазы от базовой станции 212 в схему 302 обработки, где выполняется вычисление точного местоположения антенны 108 RTK GNSS.
[0044] Фиг. 4 иллюстрирует геометрию точного измерения местоположения с конкретным примером системы 100 точного локатора линии, представленной на фиг. 1. Фиг. 4 иллюстрирует ориентацию точного локатора 100 линии по отношению к истинному северу N и расположенного таким образом, что щуп 102, который определяет магнитную ось, расположен вертикально. В примере на фиг. 4, точный локатор 100 линии удерживается таким образом, что ось 114 локатора удерживается вертикально, обычно над подземной линией, местоположение которой определялось, так что точное местоположение этой линии может быть получено с использованием антенны 108 RTK GNSS.
[0045] Как показано на фиг. 1 и 4, значение R представляет собой расстояние от оси 114 локатора, также называемой магнитной осью, до положения антенны 108 RTK GNSS. Угол Ɵ представляет собой угол между продольной осью 116 локатора и истинным севером. В этом примере Ɵ представляет собой 360° - пеленг (например, направление вперед вдоль продольной оси 116 локатора). Как обсуждалось выше, локационная ось 114 определяется геометрией низкочастотных антенн.
[0046] Как показано на фиг. 4, расстояние R между осью антенны RTK GNSS и локационной осью 114 создает ошибку относительно истинной опорной точки сетки, которая может находиться под любым углом относительно ориентации точного локатора 100 линии. Как показано на фиг. 4, ошибка по широте и ошибка по долготе определяется относительно направления на истинный север N и положения RTK GNSS 108. При локационной оси 114, расположенной вертикально над местом, где должно быть определено точное местоположение, расстоянии от RTK GNSS 108, представляющем собой расстояние R от локационной оси 114 вдоль продольной оси 116 локатора, и угле Ɵ между истинным севером N и осью Ɵ локатора, ошибки по истинной широте и долготе могут быть вычислены следующим образом:
Ошибка по широте=R косинус(360-Ɵ);
Ошибка по долготе=R синус(360-Ɵ).
[0047] Одним решением для коррекции вышеуказанных ошибок является измерение угла Ɵ и применение поправок с использованием программного обеспечения, исполняемого в схеме 302 обработки. Такое решение предполагает точный и надежный способ установления истинной угловой опорной точки сетки. В некоторых вариантах осуществления, IMU 306 может включать в себя феррозондовый магнитометр, который может использоваться для измерения магнитного поля Земли, которое обычно находится в пределах нескольких градусов от истинного севера (угловая опорная точка). Этот способ может хорошо работать, но не может рассматриваться как надежный.
[0048] Одной из проблем является изменение магнитного склонения. Магнитное склонение относится к углу между истинным севером N и магнитным севером, который является локальным направлением магнитного поля Земли. Магнитное склонение значительно варьируется по поверхности Земли, как показано на фиг. 5. Фиг. 5 иллюстрирует карту Меркатора, иллюстрирующую изогоны магнитного склонения, разработанные Национальным управлением по проблемам океана и атмосферы (NOAA) с Национальным геофизическим центром данных (NGDC) и Объединенным институтом для научных исследований экологических отраслях (CIRES). Интервалы контурных линий составляют 2 градуса, где линии с маркировкой "красный" представляют положительные склонения (направление на восток), "синий" представляет отрицательные склонения (направление на запад) и "зеленый" представляет нулевые линии склонения.
[0049] Кроме того, локальные вариации, вызванные припаркованными транспортными средствами и другими железными конструкциями, могут вызывать угловую погрешность измерения до 180°. Варианты осуществления настоящего изобретения предоставляют простой способ для решения вышеуказанных проблем, позволяя системе 100 локатора линии объединять точную локацию коммуникаций с гео-пространственными данными сантиметровой точности за счет использования RTK с антенной 108 RTK GNSS.
[0050] Фиг. 6 иллюстрирует способ работы варианта осуществления точного локатора 100 линии для регистрации и сохранения данных, относящихся к положению подземной линии 206 в географической области, для формирования карты. Некоторые варианты осуществления, описанные здесь, представляют простой, но точный способ, который корректирует собственные ошибки, описанные выше. Как обсуждалось выше, локализуемое положение определяется по отношению к электромагнитной локационной оси 114, которая определяется антеннами 202 в щупе 102 точного локатора 100 линии. На фиг. 7А и 7В показано, как точный локатор 100 линии может работать на различных этапах способа 600, чтобы сначала определить местоположение и зарегистрировать данные местоположения касательно подземной линии 206 относительно точного локатора 100 линии, а затем переориентировать точный локатор 100 линии для получения и регистрации точного положения локатора 100 линии с антенной 108 RTK GNSS.
[0051] Как показано на фиг. 6, на этапе 602 точный локатор 100 линии работает как локатор линии, используемый для определения местоположения подземной линии 206 с использованием антенн 202. Локатор 100 линии может точно определять положение подземной линии 206 относительно точного локатора 100 линии. После того как подземная линия 206 локализована точным локатором 100 линии, локатор 100 линии располагается в первой ориентации 704 над подземной линией 206 на этапе 604.
[0052] На фиг. 7А показана ориентация 704 для этапа 604, где основание 702 расположено на поверхности 208 земли, и локационная ось 114 расположена так, чтобы быть вертикальной. Ориентация 704 используется для обеспечения точной локации подземной линии 206 посредством точного локатора 100 линии с использованием антенн 202 в щупе 102. При работе, пользователи располагают основание 702 щупа 102 на уровне 208 земли и выравнивают ось 114 локатора вертикально, чтобы устранить любые ошибки смещения при определении положения подземной линии 206 относительно точного локатора 100 линии.
[0053] Как только локализуемое положение определено в ориентации 704, на этапе 606 регистрируется локационная информация. Как правило, регистрация данных на этой стадии вызывает запись массива электромагнитных измерений в память схемы обработки 302. Эти измерения могут включать в себя, например, глубину линии 206, ток в линии 206, измеренный локатором 100, боковое смещение, указывающее, что локационная ось 114 не находится непосредственно над подземной линией 206, и измерения неисправностей оборудования относительно системы 100 локации линии. Регистрация данных на этапе 606 может происходить, когда точный локатор 100 линии определяет, что он находится в ориентации 704, или при указании на пользовательском интерфейсе 104 пользователем.
[0054] Как только локационная информация зарегистрирована на этапе 606, на этапе 608 точный локатор 100 линии предлагает пользователю позиционировать локатор 100 для регистрации точных данных положения. Фиг. 7B иллюстрирует ориентацию 706, которая позволяет точно измерять положение подземной линии 206 с использованием антенны 108 RTK GNSS. В ориентации 706, пользователю предлагается наклонять точный локатор 100 линии назад, как показано на фиг. 7B до тех пор, пока антенна 108 RTK GNSS не будет выровнена с вертикальной осью 708, которая проходит вертикально через основание 702. В момент, когда антенна 108 RTK GNSS находится непосредственно над локализуемым положением, гео-пространственное положение RTK может быть измерено и присоединено к зарегистрированным измерениям с данными локационного измерения, обсужденными выше на этапе 610.
[0055] В ориентации 706, антенна 108 RTK GNSS и определенное локализуемое положение теперь находятся на одной и той же вертикальной линии, ошибка, вызванная смещением R, устраняется. Следовательно, значение R в вышеприведенных уравнениях коррекции может быть установлено равным 0 в этих уравнениях коррекции. Другими словами, RTK GNSS 108 приводится на одну линию с тем, где ось 114 локатора находилась во время локационной операции, и, следовательно, значение R уменьшается до 0 в расчете коррекции.
[0056] На этапе 612, способ 600 определяет, следует или нет регистрировать данные для каких-либо еще положений. Если нет, то точный локатор 600 линии останавливается на этапе 614. Если это так, то точный локатор 600 линии перемещается в следующее положение на этапе 616, и способ 600 возвращается к этапу 602. Таким образом, картографирование локационных данных и точных данных положения для ряда (1 или более) положений сохраняется в памяти схемы 302 обработки. Каждые зарегистрированные данные могут использоваться для определения точного положения подземной линии 206 в каждом из этих положений, поскольку геометрия точного локатора 100 линии хорошо определена. Вычисление точного положения подземной линии 206 в каждом положении может быть выполнено из зарегистрированных данных в более позднее время, или в некоторых вариантах осуществления может быть выполнено посредством схемы 302 обработки.
[0057] В некоторых вариантах осуществления, может быть включен инерциальный измерительный блок (IMU) 306. IMU 306 может быть полезным признаком для обеспечения наведения в позиционировании точного локатора 100 линии в положении 704 на фиг. 7А или 706 на фиг. 7B. В некоторых примерах, IMU 306 может включать в себя комбинированные измерения гироскопа и акселерометра. IMU 306, под управлением схемы 302 обработки, выдает измерения в реальном времени по крену, тангажу и рысканию, как показано на фиг. 8. В некоторых вариантах осуществления, скорость обновления обычно составляет 26 Гц (100 Гц максимум), а точность измерения обычно находится в пределах ±1°.
[0058] Как иллюстрируется на фиг. 8, IMU 306 инерционно измеряет ускорение вдоль локационной оси 114 (направление Z), локационной оси 116 в направлении вперед (направление X) и направлении Y, перпендикулярном направлению Z и направлению X. IMU 306 дополнительно измеряет угловое ускорение вращения вокруг каждой из осей X, Y и Z. IMU 306 дополнительно включает в себя гироскопы, которые измеряют ускорение вращения вокруг оси X (крен Φ), ускорение вращения вокруг оси Y (тангаж Ɵ) и ускорение вращения вокруг оси Z (рыскание ψ). Схема 302 обработки принимает данные ускорения от IMU 306 и может вычислять ориентацию точного локатора 100 линии.
[0059] В некоторых вариантах осуществления, измеренные углы могут иметь привязку к дисплею 104 пользовательского интерфейса локатора, который помещается в рукоятке в верхней части локатора, как показано на фиг. 1. Поэтому возможно определять точную точку, в которой локационное положение и антенны RTK GNSS являются вертикально коллинеарными. Фактическое смещение (главным образом, угол тангажа) определяется физическими размерами точного локатора 100 и является как фиксированным, так и известным.
[0060] В некоторых вариантах осуществления, наведение в процессе выравнивания может быть обеспечено на пользовательском интерфейсе 104, как иллюстрируется на фиг. 9. Как показано на фиг. 9, пользовательский интерфейс 104 включает в себя дисплей 902, который может показывать угловую компенсацию в соответствии с настройками пользователя (выключено, динамические, фиксированные). Дисплей 902 в текущее время иллюстрирует динамическую настройку пользователя. Когда угловая компенсация является “динамической”, то крен и тангаж обновляются в соответствии с измерениями в реальном времени от IMU 306. На фиг. 9 показан тангаж и крен, вычисленные из показаний 3D акселерометров (XL), на индикаторе 904, 3D гироскопов (G), как указано на индикаторе 906, и комбинированные значения тангажа и крена XL&G, как указано на индикаторе 908, как описано выше. Кроме того, уровень с воздушным пузырьком 910 демонстрирует выравнивание оси 114 локатора относительно силы тяжести. Кроме того, пользовательский интерфейс 104 может включать в себя кнопки 912 пользовательского ввода для управления работой точного локатора 100. В некоторых вариантах осуществления, уровень с воздушным пузырьком 910 может генерироваться компьютером или быть механическим уровнем. Уровень с воздушным пузырьком 910 может быть выполнен, чтобы указывать позиционирование в ориентации 704 на фиг. 7А и последующее позиционирование в ориентации 706, проиллюстрированной на фиг. 7B.
[0061] Хотя пользовательский интерфейс 104 может быть скомпонован или распределен по-разному, как показано на фиг. 9, некоторые варианты осуществления могут включать в себя виджет ‘уровень с воздушным пузырьком’ 910, предназначенный для предупреждения пользователя о том, что точное положение RTK выравнивания было достигнуто. Это предупреждение также приводит к тому, что должно измеряться точное положение, позволяя присоединять эти данные к данным карты стандартной съемки, как описано выше. В некоторых вариантах осуществления, виджет ‘уровень с воздушным пузырьком’ 910 может отображать первый уровень для выравнивания в ориентации 704, как показано на фиг. 7A, и отображать второй уровень для выравнивания в ориентации 706, как показано на фиг. 7B.
[0062] В некоторых вариантах осуществления, может быть установлено, что нет необходимости перемещать локатор в точную точку коллинеарности. С учетом того, что 3 инерциальные измерения крена, тангажа и рыскания непрерывно обновляются, и что существует известное тригонометрическое отношение между электромагнитной осью локатора и антенной RTK, может быть обосновано, что меньшее смещение является адекватным. Смещения от идеального позиционирования могут быть скорректированы путем вычисления в схеме 302 обработки на основании данных от IMU 306.
[0063] Вышеприведенное подробное описание предоставлено для иллюстрации конкретных вариантов осуществления настоящего изобретения и не предназначено для ограничения. Возможны многочисленные варианты и модификации в пределах объема настоящего изобретения. Настоящее изобретение изложено в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖЕНИЕ ПОВРЕЖДЕНИЙ | 2017 |
|
RU2760101C2 |
| СИСТЕМА И СПОСОБ ОБМЕНА ДАННЫМИ ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2730117C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ И СЕРВЕР, ИСПОЛЬЗУЕМЫЙ В НЕМ | 2014 |
|
RU2609087C2 |
| ИНСТРУМЕНТ ДЛЯ СЪЕМКИ ПЛАНА БУРЕНИЯ ДЛЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ, СИСТЕМА И СВЯЗАННЫЕ С НИМ СПОСОБЫ | 2020 |
|
RU2805584C2 |
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |
| КАЛИБРОВКА СИСТЕМЫ УПРАВЛЕНИЯ УКЛОНОМ РАБОЧЕЙ МАШИНЫ ПОСРЕДСТВОМ СМАРТФОНА | 2019 |
|
RU2734645C1 |
| ДОПОЛНЕНИЕ МЕСТОПОЛОЖЕНИЯ ПО GPS И ВОСПРОИЗВЕДЕНИЕ ПРИ ПЕРЕБОЕ В РАБОТЕ | 2021 |
|
RU2818744C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ ТКАНИ ГРУДИ | 2017 |
|
RU2748435C2 |
| ВИРТУАЛЬНЫЙ КОНТРОЛЛЕР ДЛЯ ВИЗУАЛЬНЫХ ОТОБРАЖЕНИЙ | 2007 |
|
RU2439653C2 |
| СИСТЕМА И СПОСОБ НАВИГАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2684994C1 |
Изобретение относится к технике измерений электрических величин, в частности, к устройствам и способам для измерения характеристик электромагнитного поля. Техническим результатом является повышение точности определения положения линии подземных коммуникаций. Результат достигается тем, что предложен локатор линии подземных коммуникаций, содержащий корпус, щуп, прикрепленный к корпусу, при этом щуп включает в себя решетку низкочастотных антенн, расположенных вдоль щупа, причем решетка низкочастотных антенн определяет электромагнитную локационную ось системы локатора линии, антенну кинематики в реальном времени (RTK) глобальной спутниковой навигационной системы (GNSS), прикрепленную к корпусу, пользовательский интерфейс, расположенный в корпусе, и схему обработки, связанную с решеткой низкочастотных антенн, антенной RTK GNSS и пользовательским интерфейсом, причем корпус определяет локационную ось в направлении вперед, которая перпендикулярна электромагнитной локационной оси и вдоль которой сформирована пользовательская рукоятка и прикреплены пользовательский интерфейс и антенна RTK GNSS, причем антенна RTK GNSS разнесена от электромагнитной локационной оси. 2 н. и 16 з.п. ф-лы, 9 ил.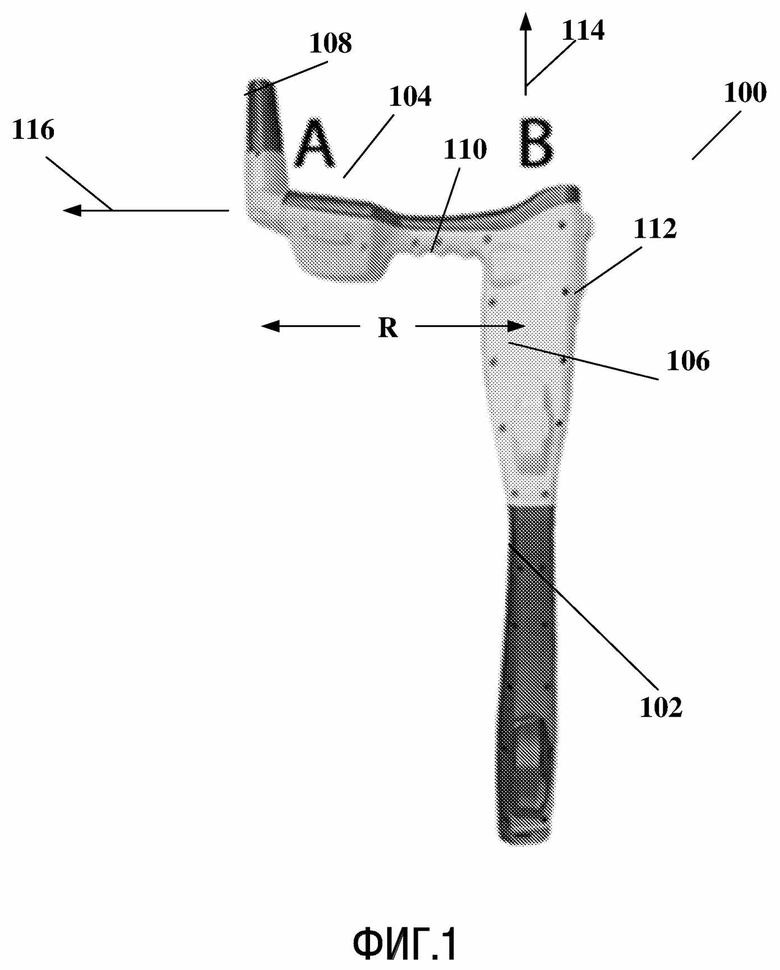
1. Локатор линии подземных коммуникаций, содержащий:
корпус;
щуп, прикрепленный к корпусу, при этом щуп включает в себя решетку низкочастотных антенн, расположенных вдоль щупа, причем решетка низкочастотных антенн определяет электромагнитную локационную ось системы локатора линии;
антенну кинематики в реальном времени (RTK) глобальной спутниковой навигационной системы (GNSS), прикрепленную к корпусу;
пользовательский интерфейс, расположенный в корпусе; и
схему обработки, связанную с решеткой низкочастотных антенн, антенной RTK GNSS и пользовательским интерфейсом,
при этом локатор подземной линии выполнен с возможностью определения локационных данных подземной линии на основе сигналов от решетки низкочастотных антенн и определения точного положения локатора подземной линии от антенны RTK GNSS,
причем корпус определяет локационную ось в направлении вперед, которая перпендикулярна электромагнитной локационной оси и вдоль которой сформирована пользовательская рукоятка и прикреплены пользовательский интерфейс и антенна RTK GNSS, причем антенна RTK GNSS разнесена от электромагнитной локационной оси.
2. Локатор линии подземных коммуникаций по п. 1, причем схема обработки регистрирует локационные данные и точное положение одной или более точек положения подземной линии.
3. Локатор линии подземных коммуникаций по п. 1, причем локатор линии подземных коммуникаций выполнен с возможностью определения локационных данных в первой ориентации и выполнен с возможностью определения точного положения во второй ориентации.
4. Локатор линии подземных коммуникаций по п. 3, причем локатор линии подземных коммуникаций выполнен с возможностью достижения первой ориентации, когда электромагнитная локационная ось совмещена с вертикальной линией и с основанием щупа, опирающимся на землю над подземной линией.
5. Локатор линии подземных коммуникаций по п. 4, причем локатор линии подземных коммуникаций выполнен с возможностью достижения второй ориентации с основанием щупа, остающимся на земле над подземной линией, и антенна RTK GNSS расположена вдоль вертикальной линии.
6. Локатор линии подземных коммуникаций по п. 3, причем схема обработки выполнена с возможностью исполнения инструкций, хранящихся в памяти, чтобы
выполнять локацию подземной линии с помощью решетки низкочастотных антенн;
определять и регистрировать локационные данные, когда локатор линии находится в первой ориентации; и
определять и регистрировать точное положение с локационными данными.
7. Локатор линии подземных коммуникаций по п. 3, дополнительно включающий в себя инерциальный измерительный блок.
8. Локатор линии подземных коммуникаций по п. 7, причем данные от инерционного измерительного блока отображаются на пользовательском интерфейсе для содействия размещению локатора линии в первой ориентации и второй ориентации.
9. Локатор линии подземных коммуникаций по п. 8, дополнительно включающий в себя один или более индикаторов уровня с воздушным пузырьком, выполненных с возможностью содействия размещению локатора линии в первой ориентации и/или второй ориентации.
10. Способ точного определения положения подземной линии, содержащий:
локацию подземной линии в положении с помощью локатора линии подземных коммуникаций, при этом локатор линии подземных коммуникаций имеет решетку низкочастотных антенн, расположенных вдоль щупа, причем решетка низкочастотных антенн определяет электромагнитную локационную ось;
расположение локатора линии подземных коммуникаций в первой ориентации;
определение и регистрацию локационных данных линии;
расположение локатора линии подземных коммуникаций во второй ориентации, в которой антенна кинематики в реальном времени (RTK) глобальной спутниковой навигационной системы (GNSS) позиционирована для обеспечения точного положения; и
определение и регистрацию точного положения с помощью локационных данных линии.
11. Способ по п. 10, дополнительно включающий в себя формирование карты подземной линии путем регистрации точного локационного положения линии во множестве положений.
12. Способ по п. 10, причем щуп прикреплен к корпусу, который определяет локационную ось в направлении вперед, которая перпендикулярна электромагнитной локационной оси и вдоль которой сформирована пользовательская рукоятка и прикреплены пользовательский интерфейс и антенна RTK GNSS, причем антенна RTK GNSS разнесена от электромагнитной локационной оси.
13. Способ по п. 12, причем первая ориентация достигается с электромагнитной локационной осью, совмещенной с вертикальной линией, и с основанием щупа, опирающимся на землю над подземной линией.
14. Способ по п. 13, причем вторая ориентация достигается с основанием щупа, остающимся на земле над подземной линией, и антенной RTK GNSS, расположенной вдоль вертикальной линии.
15. Способ по п. 12, причем расположение локатора линии подземных коммуникаций в первой ориентации включает в себя указание первой ориентации на пользовательском интерфейсе на основе данных, принятых от инерциального измерительного блока.
16. Способ по п. 12, причем расположение локатора линии подземных коммуникаций во второй ориентации включает в себя указание второй ориентации на пользовательском интерфейсе на основе данных, принятых от инерциального измерительного блока.
17. Способ по п. 12, причем расположение локатора линии подземных коммуникаций в первой ориентации включает в себя указание первой ориентации на пользовательском интерфейсе на основе данных, принятых от уровня с воздушным пузырьком.
18. Способ по п. 12, в котором расположение локатора линии подземных коммуникаций во второй ориентации включает в себя указание второй ориентации на пользовательском интерфейсе на основе данных, принятых от уровня с воздушным пузырьком.
| US 9703002 B1, 11.07.2017 | |||
| US 20090128156 A1, 21.05.2009 | |||
| WO 2019200182 A2, 17.10.2019 | |||
| WO 2018129549 A1, 12.07.2018 | |||
| WO 2010065675 A1, 10.06.2010 | |||
| 0 |
|
SU160453A1 | |

