Изобретение относится к области подводной морской техники, в частности к автономным необитаемым подводным аппаратам (АНПА), и может быть применено в разного рода подводных исследованиях.
Известен модульный АНПА, корпус которого составлен из отдельных герметичных модулей. Эти модули оборудованы герметичными разъемами для подключения оптоволоконных или кабельных линий связи внутри аппаратной информационно управляющей сети, которая объединяет электронную аппаратуру модулей в единую систему, а также герметичными разъемами для подачи в модули электропитания из отдельного модуля с источником электроэнергии - аккумуляторной батареей (Семенов Д.О., Лускин Б.А., Гурин Г.С., Клочков П.А. Трехмерное проектирование перспективных модульных НПА // Судостроение. 2017. №5. С.9-12).
Основным недостатком данного АНПА является небольшое время автономного плавания, ограниченное емкостью аккумуляторной батареи.
Известен модульный автономный необитаемый подводный аппарат (RU 2667674, B63G 8/00, 24.09.2018, БИ №27), выбранный в качестве прототипа и содержащий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала и снабжены источниками электроэнергии. В носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот. Во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, давления, электропроводности, скорости звука. В третьем модуле управления и связи установлены компьютер автономного необитаемого подводного аппарата (АНПА) и управляющий электронный блок. Третий модуль управления и связи также включает в себя устройство спутниковой связи, типа ГЛОНАСС, и гидроакустическое устройство связи. В четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства. Внешний металлический корпус объединяет четыре модуля в единое целое и придает жесткость всему устройству, а также экранирует сигналы беспроводной сети от попадания во внешнюю среду и защищает электронную аппаратуру АНПА от внешнего электромагнитного излучения.
Из-за того что функционирование оборудования, расположенного во всех модулях, обеспечивается источниками электроэнергии - аккумуляторами, прототип характеризуется недостаточным временем автономного плавания, что составляет его основной недостаток.
Задача настоящего изобретения - увеличение времени автономного плавания модульного автономного необитаемого подводного аппарата за счет использования энергии волн.
Технический результат достигается тем, что в модульном автономном необитаемом подводном аппарате, содержащем внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала, все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть, в носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот, во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности, скорости звука, в третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи, в четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, к выходам источников электроэнергии своими входами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок, закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены на наружной поверхности металлического корпуса, выходы устройств преобразования энергии волн в электрическую энергию электрическими кабелями соединены с входами устройств заряда и контроля уровня заряда источников электроэнергии, причем электрические кабели намотаны на вторые барабаны двухбарабанных электрических лебедок.
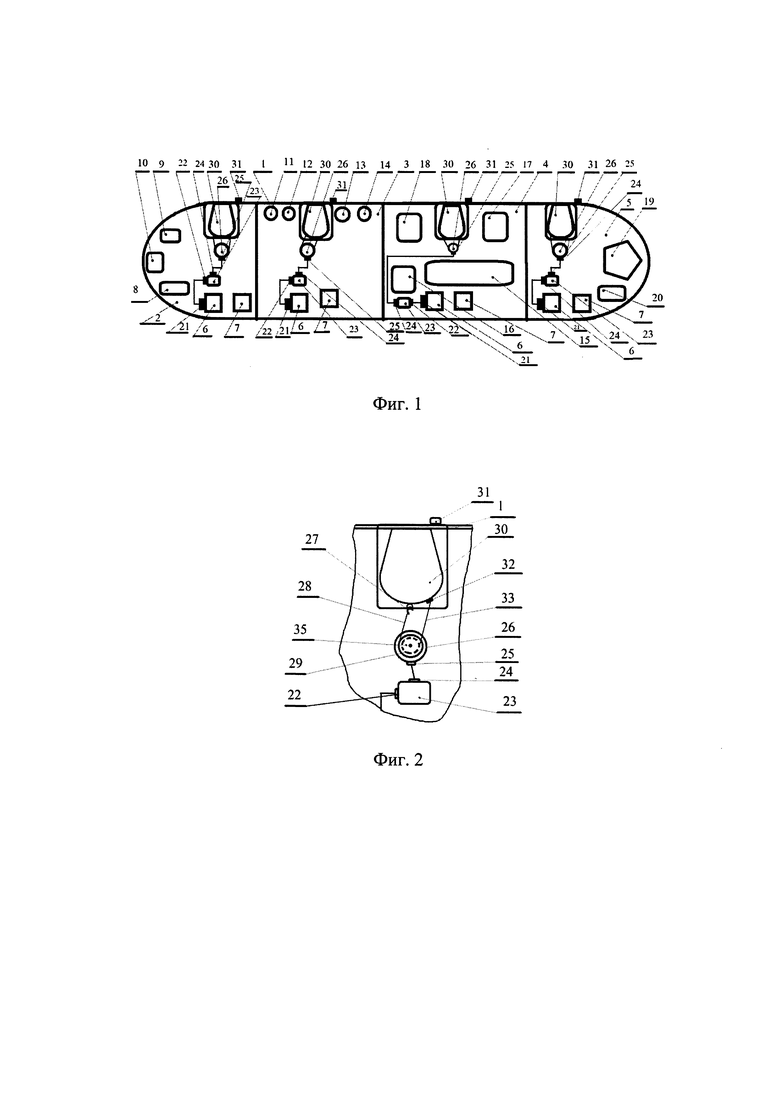
Модульный автономный необитаемый подводный аппарат поясняется чертежами, где на фиг.1 показан общий вид модульного автономного необитаемого подводного аппарата с принайтовленными устройствами преобразования энергии волн в электрическую энергию, а на фиг.2 - фрагмент модуля устройства.
Во внешнем металлическом корпусе 1 расположены четыре отдельных герметичных модуля 2-5. Внешний металлический корпус 1 может быть выполнен сплошным или составным. В последнем случае внешний металлический корпус 1 состоит из секций, образующих внешние оболочки модулей 2 - 5 и скрепленных между собой. Стенки между модулями 2-5 выполнены из радиопрозрачного материала. Внутри всех модулей 2-5 расположены источники электроэнергии 6, например, аккумуляторы, и радиомодули 7, которые осуществляют связь между модулями 2 - 5 и образуют внутри аппаратную беспроводную информационно-управляющую сеть. В носовом модуле 2 находится система технического зрения, включающая гидролокатор бокового обзора 8, фотокамеры 9 и впередсмотрящий эхолот 10, предназначенный для уклонения от столкновений. Во втором модуле 3 размещены датчики температуры 11, глубины 12, электропроводности 13, скорости звука 14. В третьем модуле управления и связи 4 установлены компьютер 15 и управляющий электронный блок 16, устройство спутниковой связи 17, типа ГЛОНАСС, и гидроакустическое устройство связи 18, предназначенное для передачи данных в подводном положении. В четвертом движительном модуле 5 расположены гребной электродвигатель 19, который служит пропульсивной установкой, и независимые рулевые устройства 20, которые осуществляют управление курсом, креном и дифферентом модульного автономного необитаемого подводного аппарата.
Надежная герметизация модулей 2-5, достигается за счет того, что корпуса модулей выполнены без ослабляющих их отверстий для сетевых и силовых разъемов. Изготовленные из радиопрозрачных материалов корпуса модулей 2-5 при повреждении внешнего металлического корпуса 1 позволяют радиомодулям 7 разных модулей поддерживать связь между собой через затопленный модуль (или модули), и, таким образом, продолжить выполнение миссии АНПА.
К выходам 21 источников электроэнергии 6 своими входами 22 подсоединены устройства заряда и контроля уровня заряда 23 источников электроэнергии 6. Управляющие выходы 24 устройств заряда и контроля уровня заряда 23 подключены к входам 25 двухбарабанных электрических лебедок 26. На гаках 27 силовых тросов 28, намотанных на первые барабаны 29 двухбарабанных электрических лебедок 26, закреплены устройства преобразования энергии волн в электрическую энергию 30 (Нетрадиционная и возобновляемая энергетика: учебное пособие / К.К. Ким. - Санкт-Петербург: ФГБОУ ВО ПГУПС, 2021. - С.126), которые с помощью электрозамков 31 закреплены на наружной поверхности внешнего металлического корпуса 1. Выходы 32 устройств преобразования энергии волн в электрическую энергию 30 электрическими кабелями 33 соединены с входами 34 устройств заряда и контроля уровня заряда 22 источников электроэнергии 6, причем электрические кабели 32 намотаны на вторые барабаны 35 двухбарабанных электрических лебедок 26.
Работа модульного автономного необитаемого подводного аппарата происходит следующим образом.
При движении модульного автономного необитаемого подводного аппарата в толще воды, если заряд источников электроэнергии 6 снижается ниже уровня, необходимого для нормального функционирования электротехнической аппаратуры в модулях 2-5, компьютер 15 в модуле управления и связи 4 считывает радиосигнал с датчика глубины 12. Если глубина погружения больше величины, которая равна длине силового троса 28, компьютер 15 подает сигнал на управляющий электронный блок 16, который в свою очередь вырабатывает управляющий радиосигнал, поступающий на гребной электродвигатель 19 и независимые рулевые устройства 20, которые осуществляют управление курсом, креном и дифферентом модульного автономного необитаемого подводного аппарата. В результате модульный автономный необитаемый подводный аппарат всплывает на требуемую глубину, и датчик глубины 12 вырабатывает соответствующий радиосигнал на компьютер 15, который подает сигнал на управляющий электронный блок 16, который в свою очередь вырабатывает радиосигнал на открытие электрозамков 31. Устройства преобразования энергии волн в электрическую энергию 30, обладающие положительной плавучестью, всплывают на поверхность воды, разматывая силовые тросы 28 и электрические кабели 33. Под действием волнения поверхности воды устройства преобразования энергии волн в электрическую энергию 30 начинают генерировать электрическую энергию, которая по электрическим кабелям 33 поступает в модули 2-5 и идет на зарядку источников электроэнергии 6. После окончания зарядки устройства заряда и контроля уровня заряда 23 генерируют сигналы, которые с управляющих выходов 24 поступают на входы 25 двухбарабанных электрических лебедок 26. Силовые тросы 28 начинают наматываться на первые барабаны 29 двухбарабанных электрических лебедок 26, а электрические кабели 33 - на вторые барабаны 35. После того, как устройства преобразования энергии волн в электрическую энергию 30 осуществляют механический контакт с металлическим корпусом 1, срабатывают электрозамки 31, фиксируя устройства преобразования энергии волн в электрическую энергию 30 на металлическом корпусе 1.
Как можно заметить, использование устройств преобразования энергии волн в электрическую энергию 30 позволяет осуществлять заряд источников электроэнергии 6 за счет использования энергии волн без всплытия на поверхность модульного автономного необитаемого подводного аппарата, что в свою очередь обусловливает увеличение времени и скрытность автономного плавания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модульный автономный необитаемый подводный аппарат | 2023 |
|
RU2804404C1 |
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2667674C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Устройство для зарядки аккумуляторной батареи автономного необитаемого подводного аппарата | 2017 |
|
RU2669198C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2015 |
|
RU2611068C1 |
| Система мониторинга подводного добычного комплекса | 2017 |
|
RU2653614C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| Глубоководный АНПА большого водоизмещения сверхбольшой автономности с комбинированным способом соединения модулей корпусной конструкции | 2019 |
|
RU2725945C1 |
| Мобильная распределённая система подводного наблюдения | 2021 |
|
RU2767384C1 |
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ КОМПЛЕКС ЖИЗНЕОБЕСПЕЧЕНИЯ | 2019 |
|
RU2729926C1 |
Изобретение относится к области подводной морской техники, в частности к автономным необитаемым подводным аппаратам. При снижении уровня заряда источников электроэнергии (6) ниже требуемого уровня компьютер (15) подает сигнал на управляющий электронный блок (16), который вырабатывает управляющий радиосигнал, на гребной электродвигатель (19) и независимые рулевые устройства (20) и модульный автономный необитаемый подводный аппарат всплывает на требуемую глубину. Компьютер (15) инициирует открытие электрозамков (31). Устройства преобразования энергии волн в электрическую энергию (30) всплывают на поверхность и под действием волн начинают генерировать электрическую энергию, которая по электрическим кабелям (33) идет на зарядку источников электроэнергии (6). После окончания зарядки запускаются двухбарабанные электрические лебедки (26), подтягивающие устройства преобразования энергии волн в электрическую энергию (30) к металлическому корпусу (1). Срабатывают электрозамки (31), фиксируя устройства преобразования энергии волн в электрическую энергию (30) на металлическом корпусе (1). Технический результат - увеличение времени автономного плавания за счет использования энергии волн. 2 ил.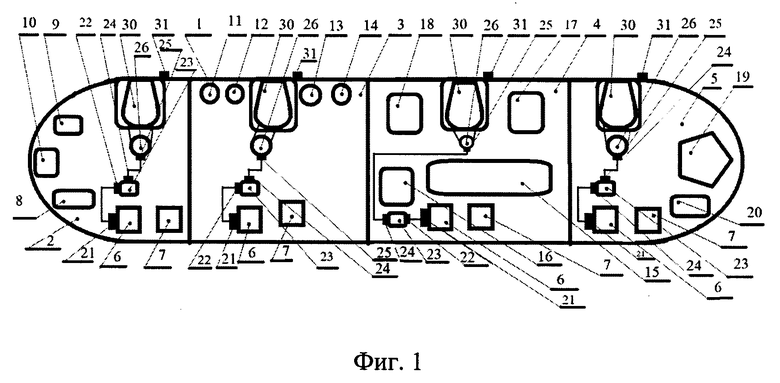
Модульный автономный необитаемый подводный аппарат, содержащий внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала, все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть, в носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот, во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности, скорости звука, в третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи, в четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, отличающийся тем, что к выходам источников электроэнергии своими входами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок, закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены на наружной поверхности металлического корпуса, выходы устройств преобразования энергии волн в электрическую энергию электрическими кабелями соединены с входами устройств заряда и контроля уровня заряда источников электроэнергии, причем электрические кабели намотаны на вторые барабаны двухбарабанных электрических лебедок.
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2667674C1 |
| АППАРАТ ДЛЯ АКТИВАЦИИ УГЛЯ | 0 |
|
SU210112A1 |
| RU 203080 U1, 22.03.2021 | |||
| РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЖИДКОСТИ К НАСАДОЧНОМУ КОЛОННОМУ АППАРАТУ | 0 |
|
SU176835A1 |
| WO 2012156425 A2, 22.11.2012 | |||
| WO 2015001377 A1, 08.01.2015. | |||

