Изобретение относится к области подводной морской техники, в частности к автономным необитаемым подводным аппаратам (АНПА), и может быть применено в разного рода подводных исследованиях.
Известен модульный АНПА, корпус которого составлен из отдельных герметичных модулей. Эти модули оборудованы герметичными разъемами для подключения оптоволоконных или кабельных линий связи внутри аппаратной информационно управляющей сети, которая объединяет электронную аппаратуру модулей в единую систему, а также герметичными разъемами для подачи в модули электропитания из отдельного модуля с источником электроэнергии - аккумуляторной батареей (Семенов Д.О., Лускин Б.А., Гурин Г.С., Клочков П.А. Трехмерное проектирование перспективных модульных НПА // Судостроение. 2017. №5. С. 9-12).
Основным недостатком данного АНПА является небольшое время автономного плавания, ограниченное емкостью аккумуляторной батареи.
Известен модульный автономный необитаемый подводный аппарат (RU 2792358, B63G 8/00, В63С 11/48, 21.03.2023), выбранный в качестве прототипа и содержащий внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала, все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть, в носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот, во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности, скорости звука, в третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи, в четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, к выходам источников электроэнергии своими входами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок, закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены на наружной поверхности металлического корпуса, выходы устройств преобразования энергии волн в электрическую энергию электрическими кабелями соединены с входами устройств заряда и контроля уровня заряда источников электроэнергии, причем электрические кабели намотаны на вторые барабаны двухбарабанных электрических лебедок.
Прототип характеризуется недостаточным временем автономного плавания из-за того, что заряд аккумуляторов, обеспечивающих функционирование оборудования, расположенного во всех модулях, происходит только тогда, когда устройства преобразования энергии волн в электрическую энергию находятся на водной поверхности и подвергаются воздействию волнения водной поверхности. Отмеченный факт составляет его основной недостаток.
Задача настоящего изобретения - увеличение времени автономного плавания модульного автономного необитаемого подводного аппарата за счет использования энергии вращательного движения крыльчаток всплывающих на поверхность воды устройств преобразования энергии волн в электрическую энергию. В результате сказанного процесс зарядки источников электроэнергии начинается сразу после отстыковки устройств преобразования энергии волн в электрическую энергию от автономного необитаемого подводного аппарата.
Технический результат достигается тем, что в модульном автономном необитаемом подводном аппарате, содержащем внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала, все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть, в носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот, во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности, скорости звука, в третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи, в четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, к входам источников электроэнергии своими силовыми выходами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок, в нишах внешнего металлического корпуса закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены в нишах внешнего металлического корпуса, выходы устройств преобразования энергии волн в электрическую энергию электрическими кабелями, которые намотаны на вторые барабаны двухбарабанных электрических лебедок, соединены с кольцевыми контактами, жестко закрепленными на боковых поверхностях ободов вторых барабанов, кольцевые контакты вместе с электрическими щетками, жестко закрепленными внутри устройств преобразования энергии волн в электрическую энергию, образуют узлы скользящего токосъема, выходы электрических щеток соединены с входами устройств заряда и контроля уровня заряда источников электроэнергии, устройства преобразования энергии волн в электрическую энергию состоят из герметичного корпуса с полыми герметичными днищем и стенками, на днище жестко закреплены электромагнитный клапан и муфта быстроразъемного гидравлического соединения, на верхней части герметичного корпуса выполнено сквозное отверстие, снабженное уплотнительным устройством манжетного типа, через внутреннее отверстие уплотнительного устройства манжетного типа проходит вертикально расположенный стержень, на верхнем конце которого жестко закреплены радиальные лопасти крыльчатки, а нижний конец стержня, расположенный во внутренней полости герметичного корпуса, жестко прикреплен к валу электрического генератора, жестко закрепленного внутри герметичного корпуса, выходы электрического генератора соединены с выходами устройств преобразования энергии волн в электрическую энергию, ответно муфте быстроразъемного гидравлического соединения в нише внешнего металлического корпуса расположен приемный ниппель быстроразъемного гидравлического соединения, к ниппелю подсоединен электрический насос.
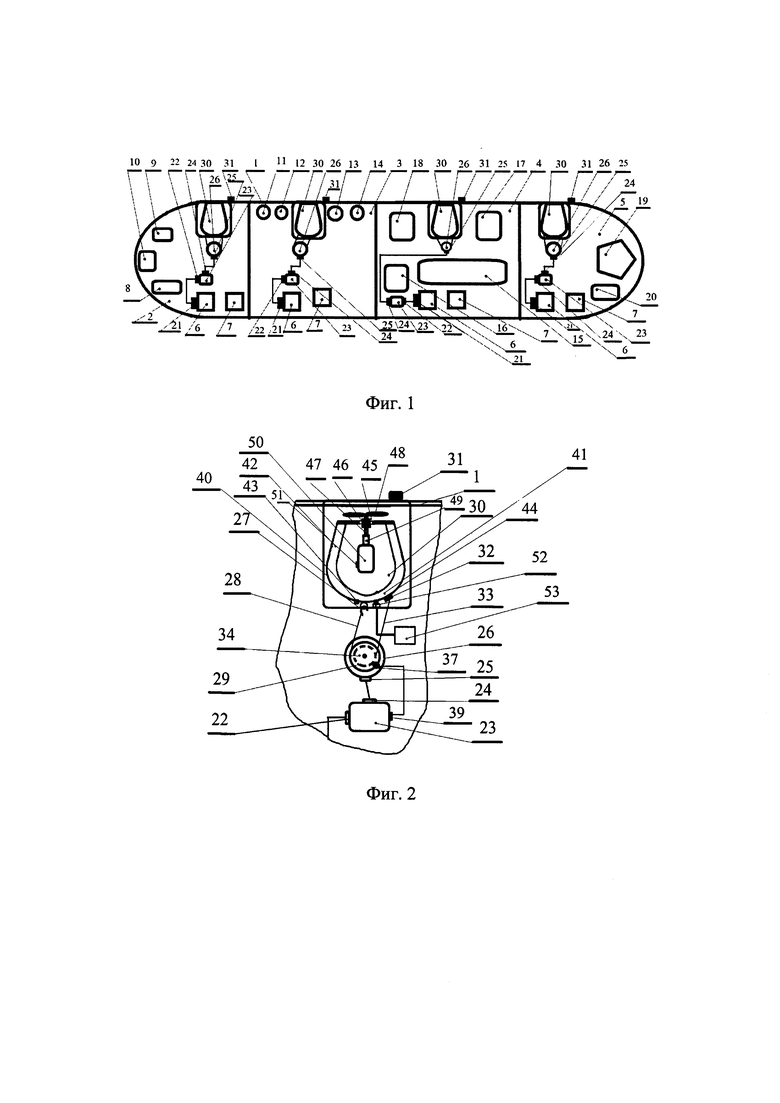
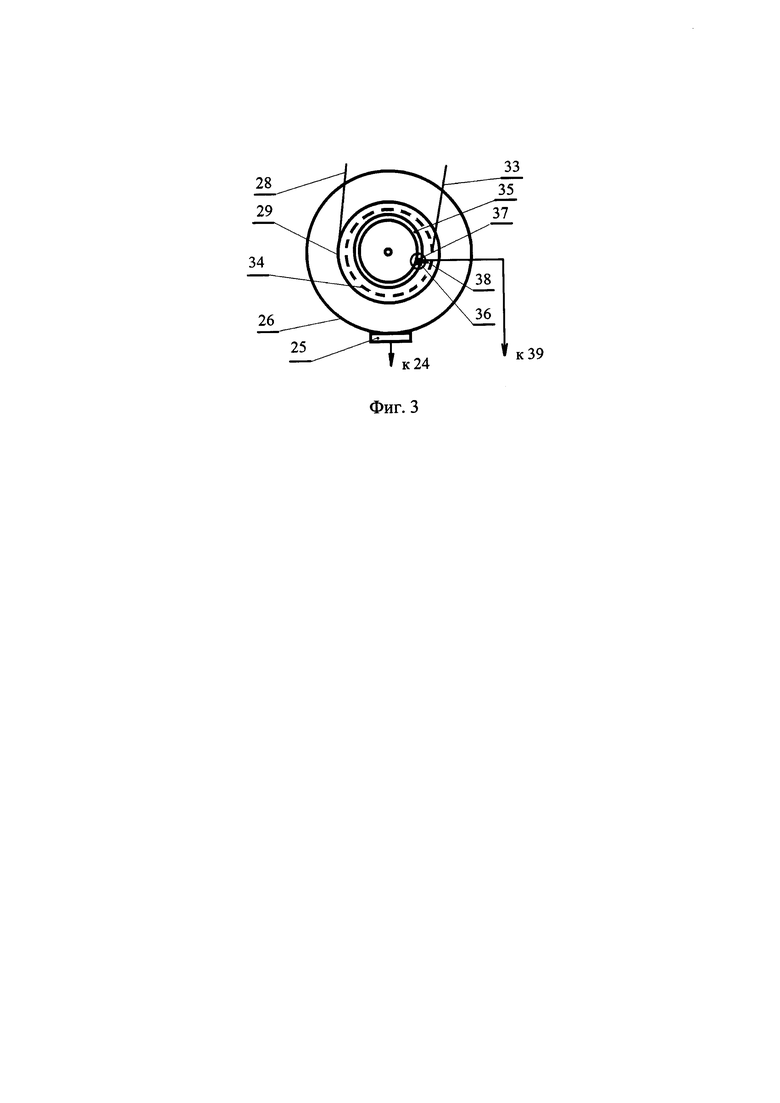
Модульный автономный необитаемый подводный аппарат поясняется чертежами, где на фиг. 1 показан общий вид модульного автономного необитаемого подводного аппарата с принайтовленными устройствами преобразования энергии волн в электрическую энергию, на фиг. 2 - фрагмент модуля устройства, а на фиг. 3 приведен вид двухбарабанной электрической лебедки.
Во внешнем металлическом корпусе 1 (фиг. 1) расположены четыре отдельных герметичных модуля 2-5. Внешний металлический корпус 1 может быть выполнен сплошным или составным. В последнем случае внешний металлический корпус 1 состоит из секций, образующих внешние оболочки модулей 2-5 и скрепленных между собой. Стенки между модулями 2-5 выполнены из радиопрозрачного материала. Внутри всех модулей 2-5 расположены источники электроэнергии 6, например, аккумуляторы, и радиомодули 7, которые осуществляют связь между модулями 2-5 и образуют внутри аппаратную беспроводную информационно-управляющую сеть. В носовом модуле 2 находится система технического зрения, включающая гидролокатор бокового обзора 8, фотокамеры 9 и впередсмотрящий эхолот 10, предназначенный для уклонения от столкновений. Во втором модуле 3 размещены датчики температуры 11, глубины 12, электропроводности 13, скорости звука 14. В третьем модуле управления и связи 4 установлены компьютер 15 и управляющий электронный блок 16, устройство спутниковой связи 17, типа ГЛОНАСС, и гидроакустическое устройство связи 18, предназначенное для передачи данных в подводном положении. В четвертом движительном модуле 5 расположены гребной электродвигатель 19, который служит пропульсивной установкой, и независимые рулевые устройства 20, которые осуществляют управление курсом, креном и дифферентом модульного автономного необитаемого подводного аппарата.
Надежная герметизация модулей 2-5, достигается за счет того, что корпуса модулей выполнены без ослабляющих их отверстий для сетевых и силовых разъемов. Изготовленные из радиопрозрачных материалов корпуса модулей 2-5 при повреждении внешнего металлического корпуса 1 позволяют радиомодулям 7 разных модулей поддерживать связь между собой через затопленный модуль (или модули), и, таким образом, продолжить выполнение миссии АНПА.
К входам 21 источников электроэнергии 6 своими силовыми выходами 22 подсоединены устройства заряда и контроля уровня заряда 23 источников электроэнергии 6. Управляющие выходы 24 устройств заряда и контроля уровня заряда 23 подключены к входам 25 двухбарабанных электрических лебедок 26. На гаках 27 (фиг. 2) силовых тросов 28, намотанных на первые барабаны 29 двухбарабанных электрических лебедок 26, закреплены устройства преобразования энергии волн в электрическую энергию 30 (Нетрадиционная и возобновляемая энергетика: учебное пособие / К.К. Ким. - Санкт-Петербург: ФГБОУ ВО ПГУПС, 2021. - С. 126), расположенные в нишах внешнего металлического корпуса 1, и которые с помощью электрозамков 31 закреплены в нишах внешнего металлического корпуса 1. Выходы 32 устройств преобразования энергии волн в электрическую энергию 30 электрическими кабелями 33, которые намотаны на вторые барабаны 34 двухбарабанных электрических лебедок 26, соединены с кольцевыми контактами 35 (фиг. 3), жестко закрепленными на боковых поверхностях ободов вторых барабанов 34. Кольцевые контакты 35 вместе с электрическими щетками 36, например, графитными или меднографитными, образуют узлы скользящего токосъема 37. Выходы 38 электрических щеток 36 соединены с входами 39 устройств заряда и контроля уровня заряда 23 (фиг. 1) источников электроэнергии 6.
Устройство преобразования энергии волн в электрическую энергию 30 (фиг. 2) состоит из герметичного корпуса 40 с полыми герметичными днищем 41 и стенками 42. На днище 41 жестко закреплены электромагнитный клапан 43 и муфта 44 быстроразъемного гидравлического соединения. На верхней части герметичного корпуса 40 выполнено сквозное отверстие 45, снабженное уплотнительным устройством манжетного типа 46. Через внутреннее отверстие уплотнительного устройства манжетного типа 46 проходит вертикально расположенный стержень 47, на верхнем конце которого жестко закреплены радиальные лопасти крыльчатки 48. Нижний конец стержня 47, расположенный во внутренней полости герметичного корпуса 40, жестко прикреплен к валу 49 электрического генератора 50, жестко закрепленного внутри герметичного корпуса 40. Выходы 51 электрического генератора 50 соединены с выходами 32 устройств преобразования энергии волн в электрическую энергию 30. Ответно муфте 44 быстроразъемного гидравлического соединения в нише внешнего металлического корпуса 1 расположен приемный ниппель 52 быстроразъемного гидравлического соединения, к приемному ниппелю 52 подсоединен электрический насос 53, например, центробежного или винтового или импеллерного типа.
Работа модульного автономного необитаемого подводного аппарата происходит следующим образом.
При движении модульного автономного необитаемого подводного аппарата в толще воды, если заряд источников электроэнергии 6 снижается ниже уровня, необходимого для нормального функционирования электротехнической аппаратуры в модулях 2-5 (фиг. 1), компьютер 15 в модуле управления и связи 4 считывает радиосигнал с датчика глубины 12. Если глубина погружения больше величины, которая равна длине силового троса 28 (фиг. 2), компьютер 15 (фиг. 1) подает сигнал на управляющий электронный блок 16, который в свою очередь вырабатывает управляющий радиосигнал, поступающий на гребной электродвигатель 19 и независимые рулевые устройства 20, которые осуществляют управление курсом, креном и дифферентом модульного автономного необитаемого подводного аппарата. В результате модульный автономный необитаемый подводный аппарат всплывает на требуемую глубину, и датчик глубины 12 вырабатывает соответствующий радиосигнал на компьютер 15, который подает сигнал на управляющий электронный блок 16, который в свою очередь вырабатывает радиосигнал на открытие электрозамков 31. Устройства преобразования энергии волн в электрическую энергию 30, обладающие положительной плавучестью, так как полые герметичные днище 41 (фиг. 2) и стенки 42 герметичного корпуса 40 изначально заполнены воздухом, начинают всплывать на поверхность воды, разматывая силовые тросы 28 и электрические кабели 33. Под действием движения всплытия к поверхности воды начинают вращаться радиальные лопасти крыльчатки 48. Посредством стержней 47 моменты вращения передаются на валы 49 электрических генераторов 50. Устройства преобразования энергии волн в электрическую энергию 30 начинают генерировать электрическую энергию, которая по электрическим кабелям 33, через узлы скользящего токосъема 37 и устройства заряда и контроля уровня заряда 23 источников электроэнергии 6 поступает в модули 2-5 (фиг. 1) и идет на зарядку источников электроэнергии 6.
При всплытии на поверхность воды устройства преобразования энергии волн в электрическую энергию 30 начинают преобразовывать энергию волн в электрическую с последующей передачей этой энергии по электрическим кабелям 33 на заряд источников электроэнергии 6 (фиг. 1) как это имеет место в прототипе.
После окончания зарядки устройства заряда и контроля уровня заряда 23 (фиг. 2) генерируют сигналы, которые с управляющих выходов 24 поступают на входы 25 двухбарабанных электрических лебедок 26 и на электромагнитные клапаны 43 по проводам, которые на чертеже не показаны. Силовые тросы 28 начинают наматываться на первые барабаны 29 двухбарабанных электрических лебедок 26, а электрические кабели 33 - на вторые барабаны 34. Одновременно с этим после срабатывания электромагнитных клапанов 43, полые герметичные днище 41 и стенки 42 герметичного корпуса 40 заполняются забортной водой. В результате устройства преобразования энергии волн в электрическую энергию 30 возвращаются в ниши внешнего металлического корпуса 1, при этом муфты 44 быстроразъемного гидравлического соединения стыкуются с приемными ниппелями 52 быстроразъемного гидравлического соединения. Одновременно с этим срабатывают электрозамки 31, фиксируя устройства преобразования энергии волн в электрическую энергию 30 в нишах металлического корпуса 1. По сигналу с компьютера 15 (фиг. 1) запускаются электрические насосы 53 (фиг. 2), которые откачивают воду из полых герметичных днища 41 и стенок 42 герметичного корпуса 40.
Как можно заметить, использование устройств преобразования энергии волн в электрическую энергию 30, снабженными крыльчатками 48 и электрическими генераторами 50, позволяет осуществлять заряд источников электроэнергии 6 не только за счет энергии волн, но и использовать энергию вращательного движения крыльчаток 48 до всплытия на поверхность устройств преобразования энергии волн в электрическую энергию 30, что в свою очередь обусловливает увеличение времени и скрытность автономного плавания.
Следует отметить, что в случае использования реверсивных электрических генераторов 50, устройства преобразования энергии волн в электрическую энергию 30 генерируют электрическую энергию и при возвращении устройств преобразования энергии волн в электрическую энергию 30 на борт модульного автономного необитаемого подводного аппарата.
Использование уменьшения плавучести устройств преобразования энергии волн в электрическую энергию 30 за счет наполнения полых герметичных днища 41 и стенок 42 герметичного корпуса 40 забортной водой позволяет уменьшить требуемую мощность двухбарабанных электрических лебедок 26 и таким образом увеличить время автономного плавания модульного автономного необитаемого подводного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2792358C1 |
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2667674C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Глубоководный АНПА большого водоизмещения сверхбольшой автономности с комбинированным способом соединения модулей корпусной конструкции | 2019 |
|
RU2725945C1 |
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ КОМПЛЕКС ЖИЗНЕОБЕСПЕЧЕНИЯ | 2019 |
|
RU2729926C1 |
| Комбинированная энергетическая установка модульного типа мобильного и стационарного исполнения, включающая возобновляемые источники энергии | 2020 |
|
RU2792171C2 |
| Устройство типа "Купол" для ликвидации подводных разливов нефти в комплекте с технологическим оборудованием | 2019 |
|
RU2723799C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
| АВТОНОМНАЯ ПОДВОДНАЯ СИСТЕМА ДЛЯ ЧЕТЫРЕХМЕРНОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ | 2012 |
|
RU2590800C2 |
Изобретение относится к области подводной морской техники, а именно к автономным необитаемым подводным аппаратам. Модульный автономный необитаемый подводный аппарат содержит внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала. Все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть. В носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры и впередсмотрящий эхолот. Во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности и скорости звука. В третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи. В четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, к входам источников электроэнергии своими силовыми выходами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок. В нишах внешнего металлического корпуса закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены в нишах внешнего металлического корпуса. Достигается увеличение времени автономного плавания за счет использования энергии вращательного движения всплывающих на поверхность воды крыльчаток. 3 ил.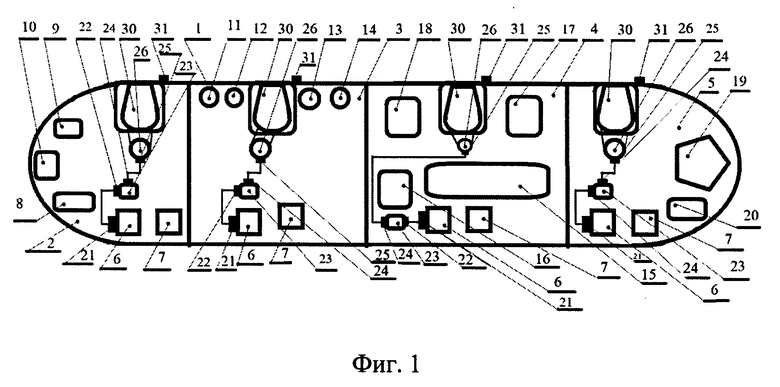
Модульный автономный необитаемый подводный аппарат, содержащий внешний металлический корпус, объединяющий четыре отдельных герметичных модуля, стенки между которыми выполнены из радиопрозрачного материала, все модули снабжены источниками электроэнергии и радиомодулями, которые осуществляют связь между герметичными модулями и образуют беспроводную информационно-управляющую сеть, в носовом модуле находится система технического зрения, включающая гидролокатор бокового обзора, фотокамеры, впередсмотрящий эхолот, во втором модуле размещена информационно-измерительная система, которая содержит датчики температуры, глубины, электропроводности, скорости звука, в третьем модуле управления и связи установлены компьютер и управляющий электронный блок, устройство спутниковой связи и гидроакустическое устройство связи, в четвертом движительном модуле расположены гребной электродвигатель и независимые рулевые устройства, к входам источников электроэнергии своими силовыми выходами подсоединены устройства заряда и контроля уровня заряда источников электроэнергии, управляющие выходы которых подключены к входам электрических лебедок, на гаках силовых тросов, намотанных на первые барабаны двухбарабанных электрических лебедок, в нишах внешнего металлического корпуса закреплены устройства преобразования энергии волн в электрическую энергию, которые с помощью электрозамков закреплены в нишах внешнего металлического корпуса, отличающийся тем, что выходы устройств преобразования энергии волн в электрическую энергию электрическими кабелями, которые намотаны на вторые барабаны двухбарабанных электрических лебедок, соединены с кольцевыми контактами, жестко закрепленными на боковых поверхностях ободов вторых барабанов, кольцевые контакты вместе с электрическими щетками, жестко закрепленными внутри устройств преобразования энергии волн в электрическую энергию, образуют узлы скользящего токосъема, выходы электрических щеток соединены с входами устройств заряда и контроля уровня заряда источников электроэнергии, устройства преобразования энергии волн в электрическую энергию состоят из герметичного корпуса с полыми герметичными днищем и стенками, на днище жестко закреплены электромагнитный клапан и муфта быстроразъемного гидравлического соединения, на верхней части герметичного корпуса выполнено сквозное отверстие, снабженное уплотнительным устройством манжетного типа, через внутреннее отверстие уплотнительного устройства манжетного типа проходит вертикально расположенный стержень, на верхнем конце которого жестко закреплены радиальные лопасти крыльчатки, а нижний конец стержня, расположенный во внутренней полости герметичного корпуса, жестко прикреплен к валу электрического генератора, жестко закрепленного внутри герметичного корпуса, выходы электрического генератора соединены с выходами устройств преобразования энергии волн в электрическую энергию, ответно муфте быстроразъемного гидравлического соединения в нише внешнего металлического корпуса расположен приемный ниппель быстроразъемного гидравлического соединения, к ниппелю подсоединен электрический насос.
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2792358C1 |
| Gyeong-Mok Lee et al | |||
| ЭПИСКОП | 1927 |
|
SU6000A1 |
| Vol | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| pp | |||
| САМОСМАЗЫВАЮЩАЯСЯ БУКСА С ПНЕВМАТИЧЕСКИМ ОХЛАЖДЕНИЕМ | 1923 |
|
SU1034A1 |
| US 8677920 B1, 25.03.2014 | |||
