Изобретение относится к радиотехнике и может быть использовано при модернизации и разработке новых систем радиозондирования (CP) с повышенной точностью, надежностью и ускоренной передачей телеметрической информации с борта аэрологического радиозонда (АРЗ) на наземную радиолокационную станцию (РЛС).
Общей проблемой при проектировании и эксплуатации CP является создание высокоточных систем измерения координат АРЗ, недорогих конструкций АРЗ, обеспечивающих измерение с минимальной погрешностью метеорологических параметров атмосферы (ΜΠΑ), надежную передачу телеметрической информации с борта АРЗ на наземную РЛС в оперативном радиусе действия системы АРЗ-РЛС. Самостоятельной проблемой при создании и эксплуатации CP является обеспечение надежной и точной передачи телеметрической информации о ΜΠΑ с борта АРЗ на РЛС в условиях замирания сигнала радиозонда из-за его раскачивания и неравномерной диаграммы направленности антенны.
Известна система радиозондирования атмосферы радиолокационного типа «Метеорит-РКЗ» работающая в диапазоне частот 1780 МГц (см. Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. Л.: - Гидрометиздат, 1977, 304 с.; Ламповый радиозонд типа РКЗ снабжен сверхрегенеративным приемопередатчиком (СГШ), который совместно с наземной РЛС «Метеорит» обеспечивает измерение угловых координат, наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем амплитудной манипуляции излучения СПП телеметрическим сигналом. Достоинством CP типа «Метеорит-РКЗ» является полная автономность работы, невысокая стоимость измерения ΜΠΑ в оперативном радиусе действия до 250 км.
Недостатком системы является низкая помехозащищенность CP при амплитудной модуляции телеметрическим сигналом излучения СПП, большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения ΜΠΑ в условиях замирания сигнала АРЗ при его раскачивании.
Известна система радиозондирования атмосферы радиолокационного типа АВК-МРЗ, работающая в диапазоне 1780 МГц (Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК - 1. - М.: Гидрометеоиздат, 1989, 149 с.; Зайцева Н.А. Аэрология. - М.: Гидрометеоиздат,1990, 325 с.). Полупроводниковый АРЗ типа МРЗ-3 снабжен сверхрегенеративным приемопередатчиком (СПИ), который совместно с наземной РЛС АВК-1 обеспечивает измерение угловых координат, определение наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем модуляции поднесущей (суперирующей) частоты СПП телеметрическим сигналом. Достоинством CP типа АВК-МРЗ является высокий уровень автоматизации обработки информации, полная автономность работы, невысокая стоимость измерения ΜΠΑ в оперативном радиусе действия до 250 км.
Недостатком системы, при всех ее достоинствах, является значительное потребление электроэнергии, а также большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения ΜΠΑ, нарушает устойчивость автосопровождения сигнала АРЗ по угловым координатам, затрудняет прием и обработку телеметрического сигнала при больших скважностях.
Известны однотипные малогабаритные полупроводниковые РЛС МАРЛ и «Вектор-М», которые совместно с АРЗ типа МРЗ-3 обеспечивают измерение угловых координат, определение наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем модуляции поднесущей (суперирующей) частоты СПП телеметрическим сигналом (см. Иванов В.Э., Фридзон М.Б., Ессяк С.П. «Радиозондирование атмосферы. Технические и метрологические аспекты - разработки и применения радиозондовых измерительных средств», под ред. В.Э.Иванова. Екатеринбург: УрО РАН, 2004, 596 с., ISBN 5-7691-1513-0). Достоинством CP типа МАРЛ-МРЗ, «Вектор-М»-МРЗ является низкое энергопотребление, высокая автоматизация управления комплексом и обработки информации, полная автономность работы, низкая стоимость измерения ΜΠΑ в оперативном радиусе действия CP (до 250 км).
Все указанные выше CP могут работать в радиопеленгационном режиме при использовании в составе радиозонда датчика давления. В этом случае передатчик РЛС для определения наклонной дальности до радиозонда не используется. Высота подъема АРЗ определяется по показаниям калиброванного датчика давления.
Недостатком указанных CP, при всех достоинствах, является большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения ΜΠΑ, нарушает устойчивость автосопровождения сигнала АРЗ по угловым координатам, затрудняет прием и обработку телеметрического сигнала при больших скважностях.
Известны системы радиозондирования атмосферы радионавигационного типа, использующие для определения координат радиозонда сигналы СНРС ГЛОНАСС/GPS/GALILEO (см. патент РФ №2480791, патенты РФ на полезные модели №106758, №109297).
Их достоинством является высокая точность определения текущих координат в течение времени всего полета АРЗ. Известным недостатком систем радиозондирования атмосферы радионавигационного типа является снижение надежности получения координатной информации в радионавигационном режиме работы CP при подавлении приемного модуля АРЗ сигналов СНРС ГЛОНАСС/GPS/GALILEO из-за непреднамеренных помех техногенного характера (системы сотовой связи).
Известна комплексная «Система радиозондирования атмосферы», см. патент РФ №127944 - прототип.
Комплексная система радиозондирования атмосферы, содержащая навигационный аэрологический радиозонд, навигационные системы GPS и ГЛОНАСС, радиолокатор слежения и приема телеинформации, отличающаяся тем, что в нее введены блок приема навигационных сигналов, блок приема и обработки навигационной и телеметрической информации и блок коммутации сигналов со следующими соединениями: навигационные системы GPS и ГЛОНАСС первым и вторым радиоканалами соответственно соединены с навигационным аэрологическим радиозондом и антенной блока приемника навигационных сигналов наземной части системы, выход этого приемника соединен с первым входом блока обработки информации и управления, со вторым входом которого соединен выход пульта управления радиолокатора, первый выход блока обработки информации и управления соединен с передатчиком запросных сигналов радиолокатора, второй выход - с блоком приема и обработки навигационной и телеметрической информации, третий и четвертый - с первым и вторым входами блока коммутации сигналов в угломестной плоскости ε и β, а его третий и четвертый входы соединены с первым и вторым выходами соответственно блока приема обработки навигационной и телеметрической информации, выходы ε и β блока коммутации сигналов соединены с системой управления приводом антенной системы радиолокатора, причем собственно радиолокатор содержит антенную систему, привод антенной системы, пульт управления, блок управления приводом и передатчик запросного сигнала со следующими соединениями: антенная система через пульт управления соединена с вторым входом блока обработки и информации, выход передатчика запросного сигнала соединен с входом запуска антенной системы, входы ε и β соединены с одноименными выходами привода антенной системы, входы которого через систему управления соединены по ε и β с выходами блока управления и коммутации сигналов; антенная система радиолокатора третьим радиоканалом соединена с навигационным аэрологическим радиозондом в двух режимах: либо двунаправленном по принципу «запрос - ответ», либо однонаправленном в режиме слежения в зависимости от применяемого типа радиолокатора.
Недостатком всех известных систем и ПРОТОТИПА, при всех их достоинствах, является следующее:
- снижение надежности получения координатной информации в радиолокационном режиме работы CP при подавлении ответного сигнала СПП АРЗ на запросный сигнал РЛС из-за непреднамеренных помех техногенного характера (системы сотовой связи), снижение точности определения высоты при значительных удалениях АРЗ в течение полета;
- снижение точности определения параметров ветра (скорости и направления) при больших удаления АРЗ в течение полета в радиопеленгационном режиме работы CP;
- снижение надежности получения координатной информации в радионавигационном режиме работы CP при подавлении приемного модуля АРЗ сигналов СНРС ГЛОНАСС/GPS/GALILEO из-за непреднамеренных помех техногенного характера (системы сотовой связи);
Технический результат достигается за счет объединения в унифицированной системе радиозондирования с пакетным методом передачи координатно-телеметрической информации, возможности реализации радиолокационного, радиопеленгационного и радионавигационного режимов работы СР.
Для решения поставленной задачи предлагается унифицированная система радиозондирования атмосферы, содержащая аэрологический радиозонд - АРЗ и наземную радиолокационную станцию - РЛС, причем АРЗ содержит блок первичных и вторичных преобразователей метеорологических параметров атмосферы - ΜΠΑ, микроконтроллер - МК со сверхрегенеративным приемопередатчиком - СПП, подключенным к антенне АРЗ, и пульт предполетной подготовки АРЗ со следующими соединениями: блок первичных и вторичных преобразователей ΜΠΑ через блок сопряжения МК, вычислитель и формирователь пакетной координатно-телеметрической информации МК - МК, далее через формирователь и модулятор суперирующего напряжения МК подключен через последовательно соединенные цепь автосмещения - СПП - и СВЧ-автогенератор - СПП - с антенной АРЗ-A1; также АРЗ соединен через разъем двухсторонней шиной связи с пультом предполетной подготовки; антенна A1 через двухсторонний радиоканал РК1 соединена с антенной А2 наземной РЛС, которая содержит следующие основные узлы: приемо-передающее устройство РЛС, блок управления РЛС и определения координат АРЗ, блок декодирования ПКТИ, блок вторичной обработки телеметрической информации - ТИ и выдачи ΜΠΑ потребителю с соответствующими соединениями, при этом имеем чисто радиолокационный режим определения пространственных координат АРЗ; при введении датчика атмосферного давления, подключенного к блоку сопряжения МК АРЗ, реализуется радиопеленгационный режим определения координат АРЗ; при введении приемного модуля ГЛОНАСС/GPS, подключенного к блоку сопряжения МК АРЗ и обеспечивающего через радиоканал РК2 прием сигналов созвездия навигационных спутников ГЛОНАСС/GPS, реализуется навигационный режим определения координат АРЗ.
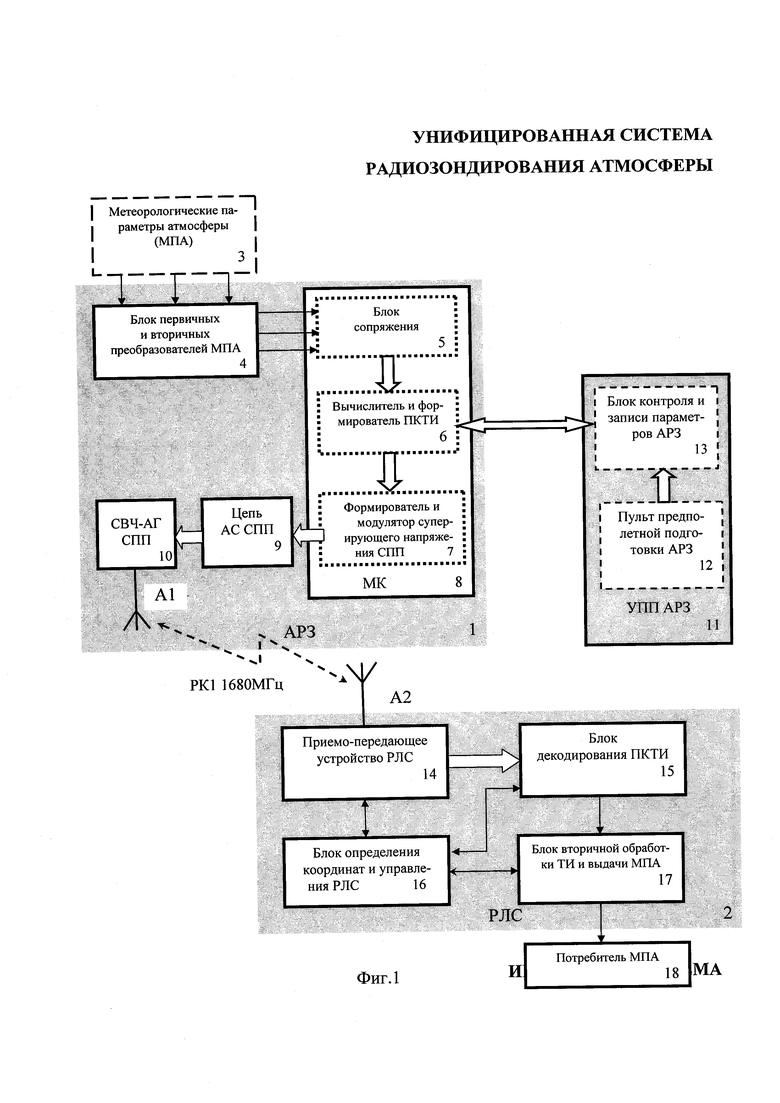
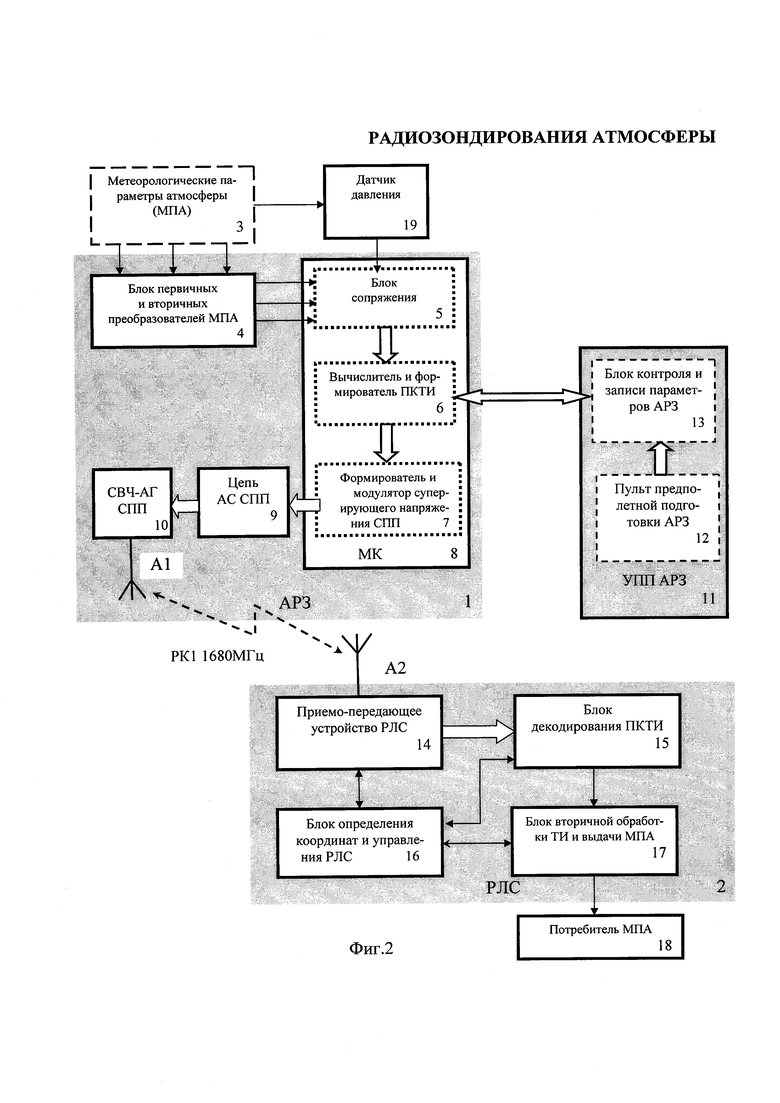
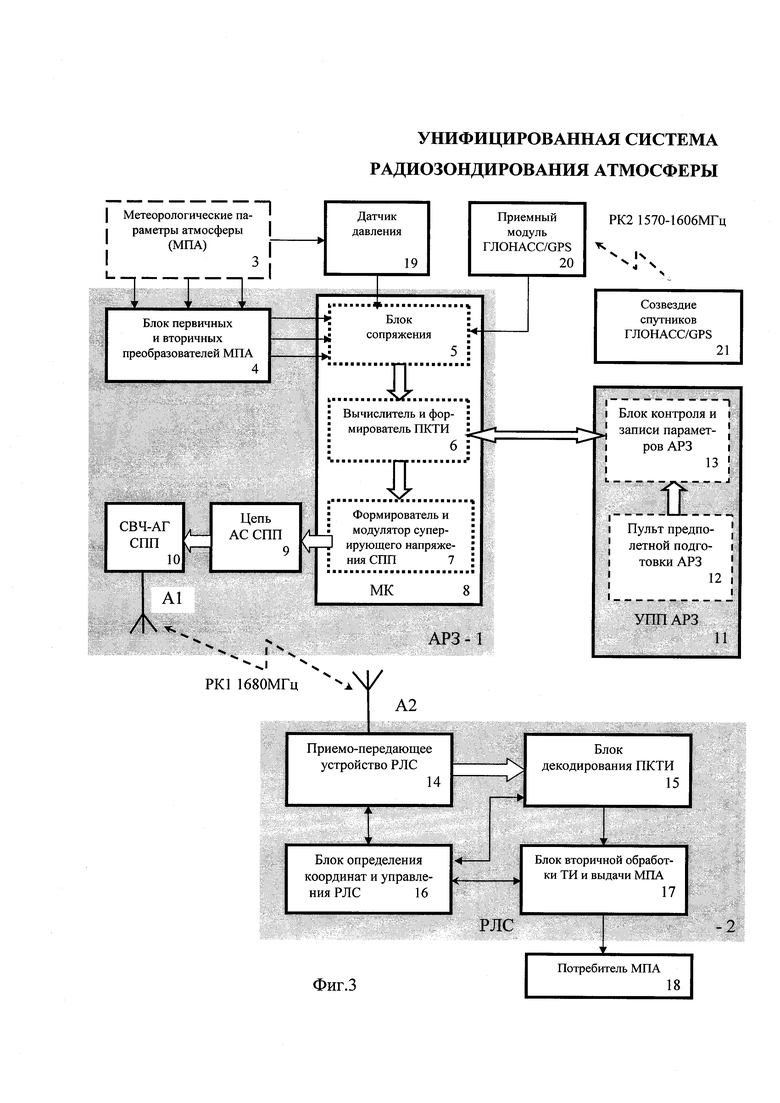
На фиг. 1 изображена структурная схема унифицированной системы радиозондирования атмосферы (УСР), которая работает в радиолокационном режиме определения текущих координат АРЗ, на фиг. 2 - в радиопеленгационном режиме, на фиг. 3 - в радионавигационном режиме приема сигналов спутниковых радионавигационных систем (СРНС) ГЛОНАСС/GPS/GALILEO.
На этих схемах изображено:
1 - АРЗ, 2 - РЛС, 3 - ΜΠΑ, 4 - блок первичных (датчиков температуры, влажности и т.д) и вторичных (измерительных преобразователей) преобразователей ΜΠΑ (БПВП), 5 - блок сопряжения (БС) аналоговой и цифровой информации, 6 - вычислитель и формирователь пакетной координатно-телеметрической информации (ПКТИ), 7 - формирователь и модулятор суперирующего напряжения (ФМСН), 8 - микроконтроллер (МК), 9 - цепь автосмещения СВЧ-автогенератора, 10 - СВЧ-автогенератор (СВЧ-АГ) сверхрегенеративного приемопередатчика (СПП), 11 - устройство предполетной подготовки АРЗ (ППП), 12 - пульт предполетной подготовки АРЗ (ППП), 13 - блок контроля и записи параметров АРЗ (БКЗП), 14 - приемо-передающее устройство РЛС (ППУ), 15 - блок декодирования ПКТИ, 16 - блок определения координат и управления РЛС (БКУ), 17 - блок вторичной обработки телеметрической информации и выдачи ΜΠΑ (БВОТИ), 18 - потребитель ΜΠΑ, 19 - датчик давления, 20 - приемный модуль АРЗ (ПМ) сигналов ГЛОНАСС/GPS, 21 - созвездие спутников СНРС ГЛОНАСС/GPS/GALILEO, РК1 - двухсторонний канал связи АРЗ с РЛС, РК2 -беззапросный радиоканал связи созвездия спутников ГЛОНАСС/GPS/GALILEO с ПМ АРЗ.
УСР на фиг. 1 имеет следующие соединения. Метеопараметры атмосферы 3 через блок первичных и вторичных преобразователей 4, затем через вычислитель и формирователь ПКТИ 6, затем через формировательи модулятор суперирующего напряжения СПП 7 поступает на цепь автосмещения СПП 9 и СВЧ-автогенератор СПП 10, нагруженный на антенну A1 АРЗ 1, устройство предполетной подготовки 11 АРЗ 1 двухсторонней шиной связи соединено с вычислителем и формирователем ПКТИ 6 в МК 8 АРЗ 1, который антенной A1 через радиоканал РК1 связан с антенной А2 РЛС 2 и через нее - с приемо-передающим устройством 14, которое связано с блоком определения координат и управления 16 и с блоком декодирования ПКТИ 15, один выход которого связан с блоком определения координат и управления 16, а другой выход - с блоком вторичной обработки ТИ и выдачи ΜΠΑ 17, выход последнего связан с блоком 16 и с потребителем ΜΠΑ 18.
УСР на фиг. 2 имеет те же соединения, что и на фиг. 1, но в нее дополнительно введен датчик давления 19, выход которого соединен с блоком сопряжения 5 МК 8.
УСР на фиг. 3 имеет те же соединения, что и на фиг. 1 и фиг. 2, но в нее введен приемный модуль сигналов СНРС ГЛОНАСС/GPS/GALILEO, вход которого через радиоканал РК2 связан с созвездием спутников ГЛОНАСС/GPS/GALILEO, а выход подключен к блоку сопряжения 5 МК 8.
Унифицированная система радиозондирования атмосферы (УСР) работает в следующих режимах:
1. Радиолокационный режим работы УСР обеспечивает измерение наклонной дальности до радиозонда импульсным методом за счет установки на АРЗ сверхрегенеративного приемопередатчика, обеспечивающего активный ответный сигнал на запросные радиоимпульсы передатчика РЛС в виде короткой ответной паузы в излучении передатчика АРЗ (см. патент РФ №2368916). Угловые координаты АРЗ по азимуту и углу места определяются методом равносигнальной зоны за счет сканирования диаграммы направленности антенны РЛС. Это позволяет определить направление ветра. Высота подъема АРЗ определяется с помощью измеренной наклонной дальности и угла места пеленга АРЗ. Передача телеметрической информации с борта АРЗ на наземную РЛС осуществляется в пакетном режиме (см. заявку №2013107294/07 по которой выдано положительное решение). РЛС определяет текущие координаты АРЗ, декодирует пакетную телеметрическую информацию ПТИ, вычисляет ΜΠΑ и осуществляет передачу информации о пространственном распределении ΜΠΑ потребителю ΜΠΑ.
2. В радиопеленгационном режиме работы УСР осуществляет определение высоты подъема АРЗ с помощью показаний датчика давления и вычислений по барометрической формуле (см. Иванов В.Э., Фридзон М.Б., Ессяк СП. «Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств», под ред. В.Э. Иванова. - Екатеринбург: УрО РАН, 2004, 596 с. ISBN 5-7691-1513-0). Угловые координаты АРЗ по азимуту и углу места определяются методом равносигнальной зоны за счет сканирования диаграммы направленности антенны РЛС. Это позволяет определить направление ветра. Передача телеметрической информации с борта АРЗ на наземную РЛС осуществляется в пакетном режиме. РЛС определяет текущие координаты АРЗ, декодирует пакетную телеметрическую информацию ПТИ, вычисляет ΜΠΑ и осуществляет передачу информации о пространственном распределении ΜΠΑ потребителю ΜΠΑ.
3. В радионавигационном режиме работы УСР осуществляет определение текущих координат, скорости и направления ветра, высоты подъема АРЗ с помощью показаний приемного модуля сигналов СНРС ГЛОНАСС/GPS/GALILEO (см. патенты РФ №2480791, №109297,106758). Передача телеметрической информации с борта АРЗ на наземную РЛС осуществляется в пакетном режиме.
Таким образом, предлагаемая УСР на основе использования пакетного метода передачи координатно-телеметрической информации с борта АРЗ на РЛС позволяет дополнительно реализовать радиопеленгационный и радионавигационный режимы работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2015 |
|
RU2613153C1 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
Изобретение относится к радиотехнике и может быть использовано при модернизации и разработке новых систем радиозондирования (CP) с повышенной точностью, надежностью и ускоренной передачей телеметрической информации с борта аэрологического радиозонда (АРЗ) на наземную радиолокационную станцию (РЛС). Достигаемый технический результат - повышение надежности и достоверности передаваемой телеметрической информации о метеорологических параметрах атмосферы ΜΠΑ. Для достижения указанного результата предлагается унифицированная система радиозондирования атмосферы, позволяющая работать в трех режимах: радиолокационном, радиопеленгационном, радионавигационном. 3 ил.
Унифицированная система радиозондирования атмосферы, содержащая аэрологический радиозонд - АРЗ, наземную радиолокационную станцию (РЛС), а также приемник навигационных сигналов ГЛОНАСС/GPS, отличающаяся тем, что АРЗ содержит блок первичных и вторичных преобразователей метеорологических параметров атмосферы (МПА), соединенный с микроконтроллером (МК), содержащим последовательно соединенные блок сопряжения, вычислитель и формирователь пакетной координатно-телеметрической информации (ПКТИ), формирователь и модулятор суперирующего напряжения, который подключен через цепь автосмещения к СВЧ-автогенератору сверхрегенеративного приемопередатчика, соединенному в антенной АРЗ, которая через двухсторонний радиоканал (РК) соединена с антенной наземной РЛС, содержит также пульт управления предполетной подготовки, соединенный двухсторонней шиной связи с АРЗ; причем антенна А1 АРЗ через двухсторонний радиоканал РК1 соединена с антенной А2 наземной РЛС, которая содержит следующие основные узлы: приемо-передающее устройство РЛС, блок управления РЛС и определения координат АРЗ, блок декодирования ПКТИ, блок вторичной обработки телеметрической информации - ТИ - и выдачи МПА потребителю с соответствующими соединениями, при этом имеем радиолокационный режим определения пространственных координат АРЗ; при введении датчика атмосферного давления, подключенного к блоку сопряжения МК АРЗ, реализуется радиопеленгационный режим определения координат АРЗ; с приемным модулем ГЛОНАСС/GPS, подключенным к блоку сопряжения МК АРЗ и обеспечивающим через радиоканал РК2 прием сигналов созвездия навигационных спутников ГЛОНАСС/GPS, реализуется навигационный режим определения координат АРЗ.
| Амортизатор для гашения гидравлических ударов, возникающих в пульпопроводе | 1959 |
|
SU127944A1 |
| Способ изготовления комбинированных бумажно-прессшпановых трубок | 1960 |
|
SU138807A1 |
| RU 93057438 A, 10.09.1996 | |||
| Способ изготовления биметаллических проводов | 1959 |
|
SU124405A1 |
| US 5379224 A, 03.01.1995 | |||
| Способ получения -хлорэтиламидов арилоксиалкилкарбоновых кислот | 1975 |
|
SU545636A1 |
| US 5107261 A, 21.04.1992 | |||
| JP 2010279034 A, 09.12.2010. | |||

