Изобретение относится к контрольно-измерительной и сигнальной аппаратуре, предназначенной для взвешивания железнодорожных вагонов и цистерн преимущественно в процессе их движения с получением при этом информации о поосной нагрузке и полном весе вагона с его привязкой к выявленному идентификационному номеру вагона, наличии опасной неравномерности нагрузки на колеса каждой оси, привязке вагона с определенным весом и инвентарным номером к его порядковому номеру в составе, соответствии состава данным из вычислительной системы железной дороги.
В настоящее время известны различные типы весоизмерительных устройств, предназначенных для измерения веса неподвижных и движущихся единиц подвижного железнодорожного состава-вагонов, цистерн, платформ и т.п. В таких устройствах чаще всего используются тензометрические датчики, установленные на измерительных рельсах в межшпальном пространстве. В частности, известны выбранные в качестве аналога весы рельсовые тензометрические фирмы «Авитек-Плюс» (Весы вагонные рельсового типа ВД-30. Проспект фирмы «Авитек-Плюс». Ресурс Интернет www.avitec.ru), содержащие рельсы измерительные, встраиваемые в разрез железнодорожного пути, и электронную аппаратуру взвешивания вагонов в движении и статике. Рельсы измерительные снабжены тензометрическими резистивными датчиками деформации, включенными в основном по мостовой схеме и вырабатывающими информацию о перерезывающих силах в рельсе как многоопорной балке. Указанные датчики располагаются, как правило, в зоне нейтральной оси рельса примерно в середине его шейки.
Рассмотренные весы обладают приемлемой точностью определения нагрузки от каждой колесной оси, но не дают возможность сформировать полную информацию о проходящем составе, т.к. не позволяют:
- увязать вычисленный полный вес вагона с его инвентарным номером, выявленным с использованием средств технического зрения;
- выявить опасную неравномерность нагрузки на противоположные колеса одной колесной оси;
- получить обобщенную информацию о вагоне, включающую его вес, инвентарный номер и порядковый номер в составе.
- сравнить фактические данные по составу (веса и инвентарные номера вагонов по порядку их следования в поезде) с исходными данными по составу, сформированными в информационно-вычислительной системе железной дороги при комплектовании состава.
Указанные недостатки значительно снижают функциональные возможности выбранного аналога и не позволяют обеспечить его полноценное интегрирование в автоматизированную систему управления железной дороги.
Известны выбранные за прототип весы рельсовые тензометрические (патент РФ №2685741 от 14.08.2018), предназначенные для поколесного взвешивания железнодорожных вагонов в движении. Весы содержат капсулированные датчики деформации, преимущественно тензометрические, скрепленные с рельсами клеевым способом, и контроллеры, соединенные с компьютером и источником электропитания.
К недостатку прототипа, как и аналога, относятся его недостаточные функциональные возможности, не позволяющие сформировать достаточно полное представление о составе и сопоставить его с характеристиками состава, сформированными в вычислительной системе железной дороги при комплектовании состава.
Целью изобретения является расширение функциональных возможностей прототипа за счет увязывания вычисленного полного веса вагона с его инвентарным номером, выявления опасной неравномерности нагрузки на противоположные колеса каждой колесной оси, получения обобщенной информацию о вагоне, включающей его вес, инвентарный номер и порядковый номер в составе, а также сопоставления фактических выявленных данных по составу с исходными данными, сформированными по составу в парке отправления.
Поставленная цель изобретения достигается тем, что наряду с установленными на рельсах в межшпальном пространстве датчиками деформации, соединенными соответственно с первым и вторым контроллерами, и вычислителем, имеются три блока оперативных запоминающих устройств (ОЗУ), блок вычитания, блок фиксации начала и конца вагона, телевизионная камера со встроенным контроллером считывания номеров вагонов, а также счетчик. При этом блок фиксации начала и конца вагона соединен с управляющими входами ОЗУ, телевизионной камеры, а также входом счетчика и вычислителем, выходы первого и второго контроллеров через первое ОЗУ, выходы второго и третьего ОЗУ, связанных также с выходами первого и второго контроллеров, через блок вычитания, а выходы счетчика и контроллера считывания номеров вагонов телекамеры непосредственно соединены с вычислителем, также связанным с информационно-вычислительной системой железной дороги.
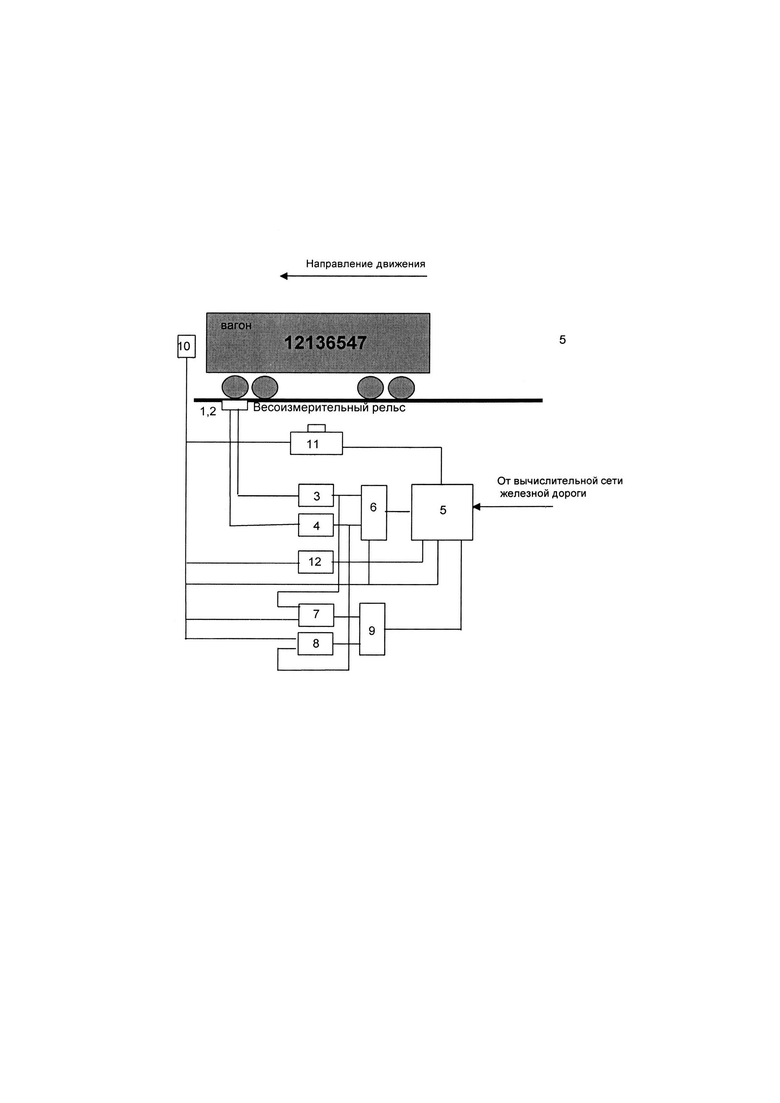
Структурная схема устройства приведена на фигуре.
Показанное на фигуре устройство содержит установленные на расположенных по обоим сторонам рельсового пути весоизмерительных рельсах в межшпальном пространстве датчики деформации 1, 2, соединенные соответственно с первым и вторым контроллерами 3, 4, и вычислитель 5. При этом имеются три блока ОЗУ 6, 7, 8, блок вычитания 9, блок фиксации начала и конца вагона 10, телевизионная камера со встроенным контроллером считывания номеров вагонов 11, а также счетчик 12. Блок фиксации начала и конца вагона 10 соединен с управляющими входами ОЗУ 6, 7, 8, телевизионной камеры 11, а также входом счетчика 12 и вычислителем 5. Кроме того, выходы первого и второго контроллеров 3 и 4 через первое ОЗУ 6, выходы второго и третьего ОЗУ 7, 8, связанных также с выходами первого и второго контроллеров 3 и 4, через блок вычитания 9, а выходы счетчика 12 и контроллера считывания номеров вагонов телевизионной камеры 11 непосредственно соединены с вычислителем 5, также связанным с информационно-вычислительной системой железной дороги.
При практической реализации устройства могут быть использованы следующие технические решения. В качестве датчиков деформации 1 и 2 можно использовать индукционные датчики предприятия «Приборист» (Россия, Санкт-Петербург) или компании «Малленом Системз» (Россия, г. Череповец), а также тензометрические резистивные датчики мостового типа BHF1K-2FG фирмы Great Vendor. Контроллеры 3, 4, ОЗУ 6, 7, 8, блок вычитания 9, счетчик 12 могут быть реализованы на основе модульных ЭВМ. В качестве вычислителя 5 можно использовать типовой компьютер с соответствующим программным обеспечением и многоканальным входом.
Программное обеспечение вычислителя 5, в частности, обеспечивает: -прием информации о количестве локомотивов в составе по локальной сети от автоматизированной системы управления сортировочной станции;
- протоколирование данных о проходящих составах;
- фиксацию начала состава и промежутков между вагонами;
- вывод на экран монитора изображения проходящего состава;
- запись на жесткий диск сжатого (компрессированного) видеоизображения от телевизионной камеры;
- хранение архива видеоизображений, ограниченного емкостью жесткого диска;
- просмотр видеоархива;
- воспроизведение записанного видеоряда с заданной скоростью в прямом и обратном направлении;
- покадровый просмотр и режим стоп-кадра.
Блок фиксации начала и конца вагона 10 может быть реализован на основе однолучевого лазерного дальномера непрерывного действия с цифровым выходом, например, BOSCH GLM 80. Телевизионная камера 11 может быть реализована на ПЗС-матрице и снабжена контроллером идентификации инвентарных номеров вагонов. Алгоритм работы такого контроллера может быть реализован на методе нейронных сетей, либо на методе Виолы-Джонса.
При реализации цели изобретения устройство работает следующим образом.
В момент прохождения промежутка между вагонами перед блоком фиксации начала и конца вагона 10 вырабатывается управляющий сигнал, обнуляющий память оперативных запоминающих устройств 6, 7, 8, запускающий телевизионную камеру 11 с контроллером считывания номеров вагонов, а также инициирующий работу вычислителя 5 с очередным вагоном. В процессе движения вагона колесные оси его тележек последовательно наезжают на датчики деформации 1, 2, расположенные в межшпальном пространстве весоизмерительных рельсов. В контроллерах 3 и 4 сигнал с датчиков деформации 1, 2 преобразуется в цифровой код, содержащий информации о весовой нагрузке от каждого колеса вагонной оси. Эти величины сбрасываются в первое ОЗУ 6. При движении вагона при прохождении каждой колесной оси через весоизмерительный рельс процесс повторяется и в ОЗУ 6 запоминается информация о весовой нагрузке от каждого колеса вагонных тележек данного вагона. По окончании прохождения вагона срабатывает блок фиксации начала и конца вагона 10, по сигналу с которого накопленная в ОЗУ 6 информация о весовой нагрузке всех колес вагона сбрасывается в вычислитель 5, который рассчитывает вес вагона.
С запуском телевизионной камеры 11 с контроллером считывания номеров вагонов начинается процесс идентификации номера вагона. Определенный телевизионной камерой 1 инвентарный номер вагона (бортовой номер) поступает в вычислитель 5 и привязывается к вычисленному весу вагона.
При начале прохождения вагона также начинается процесс определения неравномерности нагрузки на колеса каждой колесной оси. При этом информация с контроллеров 3 и 4 поступает соответственно на ОЗУ 7 и 8, с которых сбрасывается в блок вычитания 9, который вычисляет разность нагрузки на колеса каждой оси и передает ее в вычислитель 5. При этом процесс повторяется для каждой колесной оси вагона. Счетчик 12 считает вагоны по промежуткам между ними, показания счетчика сбрасываются в вычислитель 5, в котором они привязываются к бортовому номеру вагона, его весу, разностям нагрузок на колеса вагона. Одновременно эти данные сверяются с данными по вагону, передаваемыми информационно-вычислительной системой железной дороги.
Таким образом, в процессе работы данного устройства не только производится поосное взвешивание вагона, но и осуществляется:
- вычисление полной массы вагона с его привязкой к выявленному идентификационному номеру вагона;
- выявление опасной неравномерности нагрузки на колеса каждой оси, что в ряде случаев может привести к опасному крену или даже опрокидыванию вагона;
- привязка вагона с определенным весом и бортовым номером к его порядковому номеру в составе;
- сопоставление полученных данных с данными, сформированными в вычислительной системе железной дороги при формировании состава.
Совокупность перечисленных свойств устройства, по сравнению с прототипом, значительно повышает информативность результатов его работы и расширяет функциональные возможности автоматического контроля коммерческой сохранности грузов на железной дороге.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный пост динамического взвешивания железнодорожных составов (АПДВ) | 2023 |
|
RU2828636C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| Способ автоматизированного учета вагонов и контейнеров в движущемся железнодорожном составе | 2022 |
|
RU2784230C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| ИЗМЕРИТЕЛЬ КОЛЕСНЫХ НАГРУЗОК | 2023 |
|
RU2812801C1 |
| ВЕСЫ РЕЛЬСОВЫЕ ТЕНЗОМЕТРИЧЕСКИЕ | 2018 |
|
RU2685741C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
Изобретение относится к контрольно-измерительной и сигнальной аппаратуре, предназначенной для взвешивания железнодорожных вагонов, преимущественно в процессе их движения. Автоматизированная система взвешивания подвижного состава содержит установленные на рельсах в межшпальном пространстве датчики деформации, соединенные соответственно с первым и вторым контроллерами, и вычислитель. Имеются три блока оперативных запоминающих устройств (ОЗУ), блок вычитания, блок фиксации начала и конца вагона, телевизионная камера со встроенным контроллером считывания номеров вагонов, а также счетчик. При этом блок фиксации начала и конца вагона соединен с управляющими входами ОЗУ, телевизионной камеры, а также входом счетчика и вычислителем, выходы первого и второго контроллеров через первое ОЗУ, выходы второго и третьего ОЗУ, связанных также с выходами первого и второго контроллеров, через блок вычитания, а выходы счетчика и контроллера считывания номеров вагонов телекамеры непосредственно соединены с вычислителем, также связанным с информационно-вычислительной системой железной дороги. В результате расширяются функциональные возможности системы взвешивания подвижного состава. 1 ил.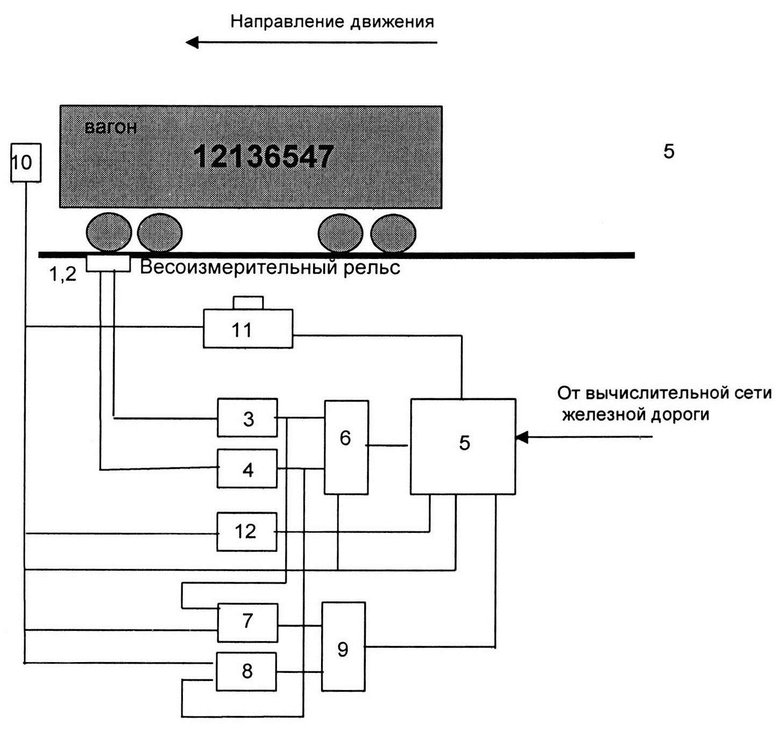
Автоматизированная система взвешивания подвижного состава, содержащая установленные на рельсах в межшпальном пространстве датчики деформации, соединенные соответственно с первым и вторым контроллерами, и вычислитель, отличающаяся тем, что имеются три блока ОЗУ, блок вычитания, блок фиксации начала и конца вагона, телевизионная камера со встроенным контроллером считывания номеров вагонов, а также счетчик, при этом блок фиксации начала и конца вагона соединен с управляющими входами ОЗУ, телевизионной камеры, а также входом счетчика и вычислителем, выходы первого и второго контроллеров через первое ОЗУ, выходы второго и третьего ОЗУ, связанных также с выходами первого и второго контроллеров, через блок вычитания, а выходы счетчика и контроллера считывания номеров вагонов телекамеры непосредственно соединены с вычислителем, также связанным с информационно-вычислительной системой железной дороги.
| ВЕСЫ РЕЛЬСОВЫЕ ТЕНЗОМЕТРИЧЕСКИЕ | 2018 |
|
RU2685741C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ВЗВЕШИВАНИЯ СЦЕПЛЕННЫХ НАХОДЯЩИХСЯ В ДВИЖЕНИИ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2012 |
|
RU2615707C2 |
| US 4317496 A, 02.03.1982 | |||
| СПОСОБ ВЗВЕШИВАНИЯ ДВИЖУЩЕГОСЯ ЖЕЛЕЗНОДОРОЖНОГО ОБЪЕКТА | 2005 |
|
RU2287137C1 |

